
Optimal Dual Active Bridge DC-DC Converter Operation with Minimal Reactive Power for Battery Electric Vehicles Using Model Predictive Control


Abstract
:1. Introduction
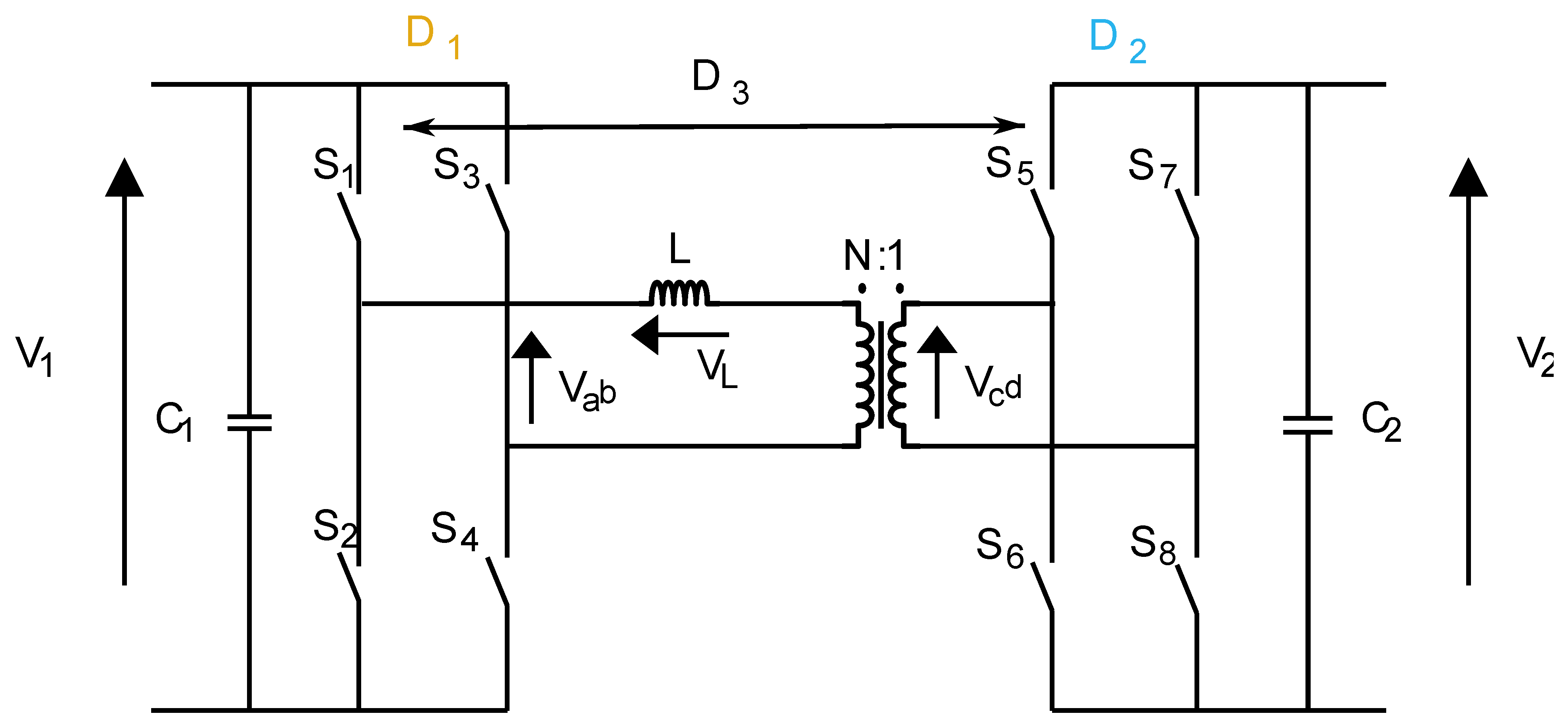
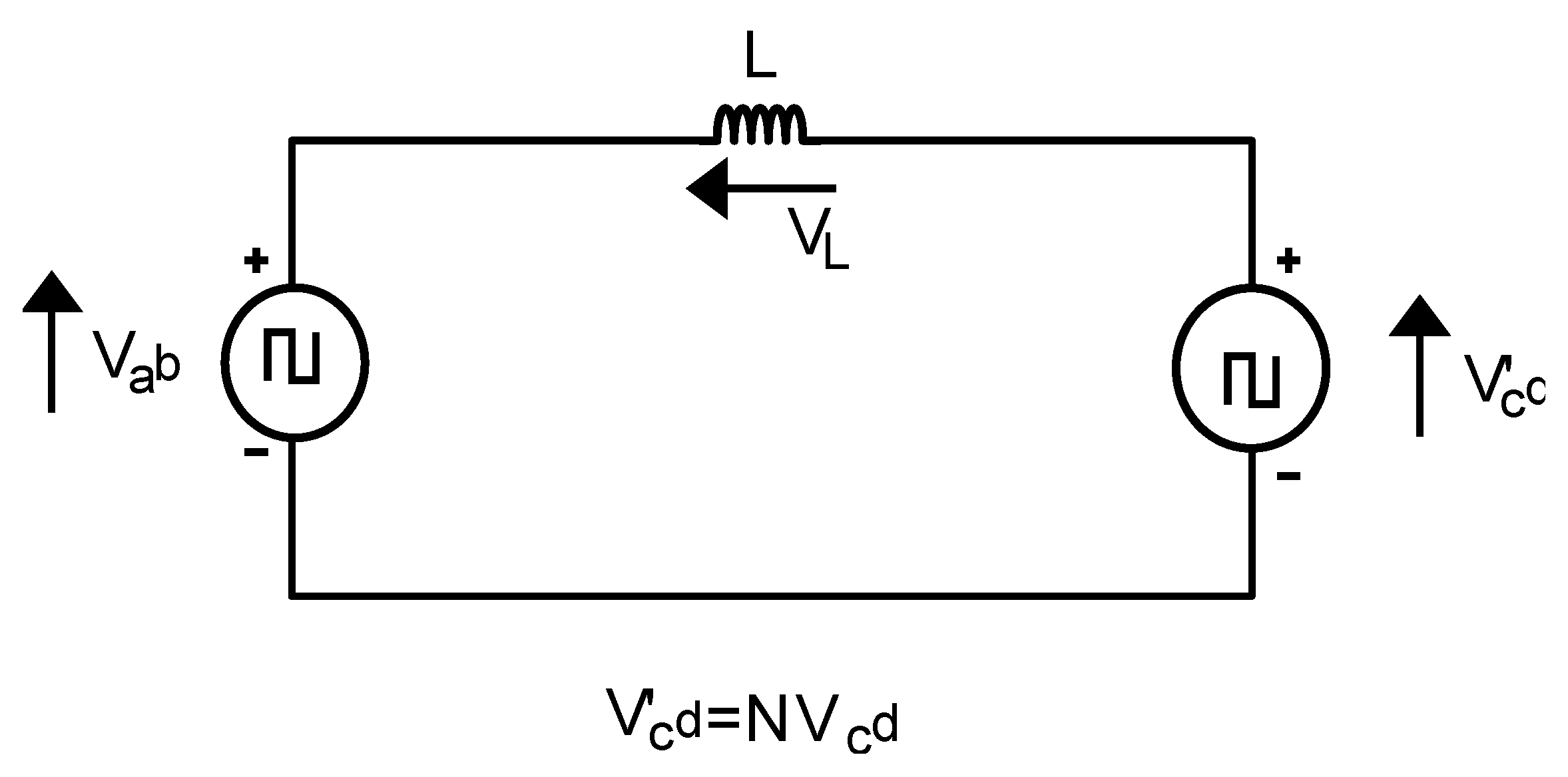
2. Dual Active Bridge DC-DC Converter
2.1. Global Context
- Single phase shift (SPS), D1 = D2 = 1, where in order to regulate and control output voltage, only D3 is controlled.
- Dual phase shift (DPS), a modulation technique which offers an additional degree of freedom besides D3, to eliminate/minimize the circulating current, where only D1 or D2 is controlled (also known as extended phase shift (EPS)) [16], or where both D1 and D2 are controlled, but keeping D1 = D2 [17,18,19].
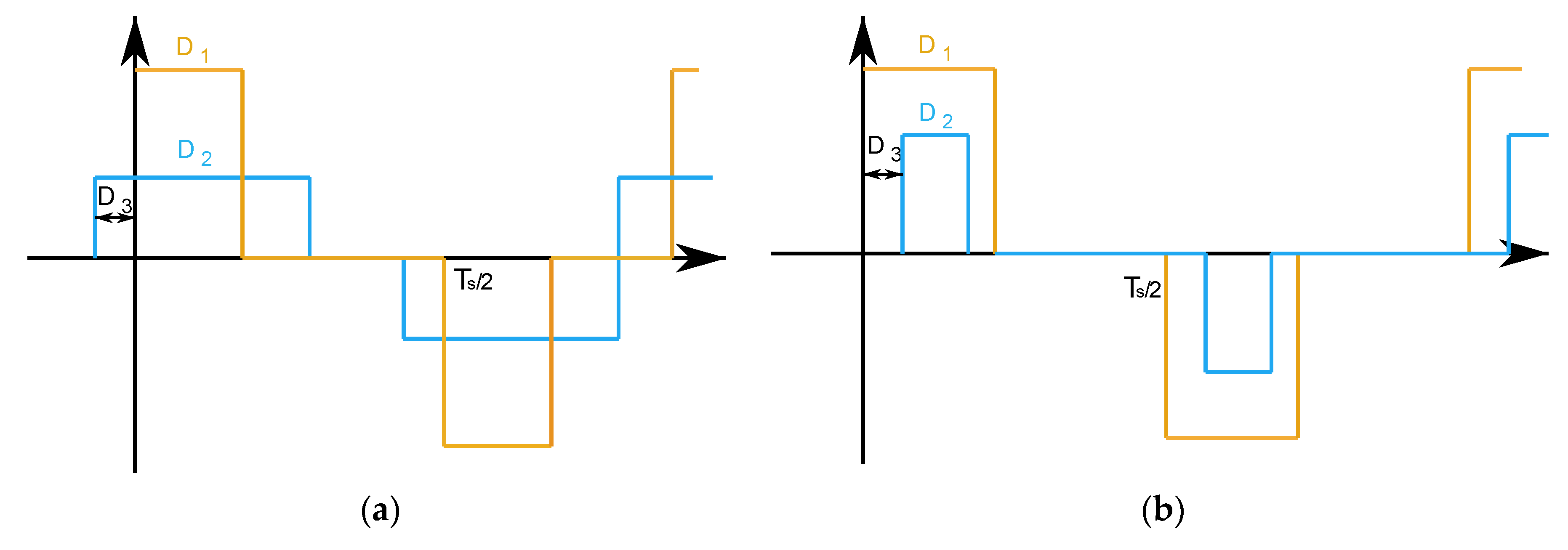
2.2. Optimal Operation Modes
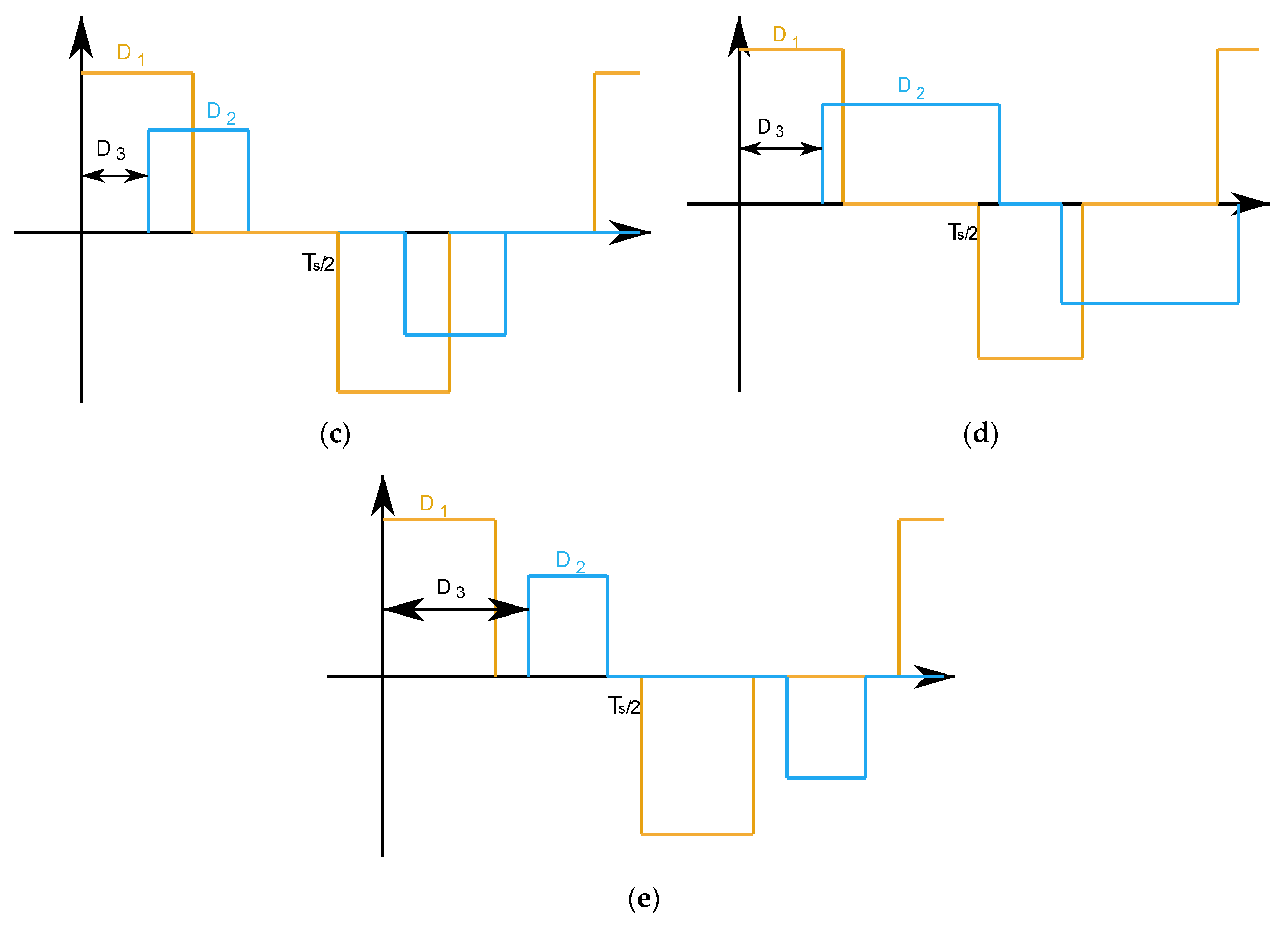
- Mode 1, Figure 4a: the rising edge of v′cd leads that of vab, where D3 ≤ 0. Based on the constraint Df > 0, D2/2 + D3 > D1/2 is derived according to (2), and the constraint leads to having the falling edge of v′cd lag that of vab.
- Modes 2–4, Figure 4b–d: the rising edge of v′cd is located between the rising and falling edges of vab, where 0 ≤ D3 ≤ D1. However, the difference between the three modes appears in the falling edge of v′cd which is decided by D2/2 + D3.
- Mode 5, Figure 4e: the rising edge of v′cd lags the falling edge of vab, where D3 ≥ D1. Based on the constraint Df ≤ 1/2, D2/2 + D3 ≤ 1 is derived according to (2), which means the falling edge of v′cd is within the same half-cycle as its rising edge.
3. Model Predictive Control (MPC) for Minimum Global Reactive Power of DAB DC-DC Converter
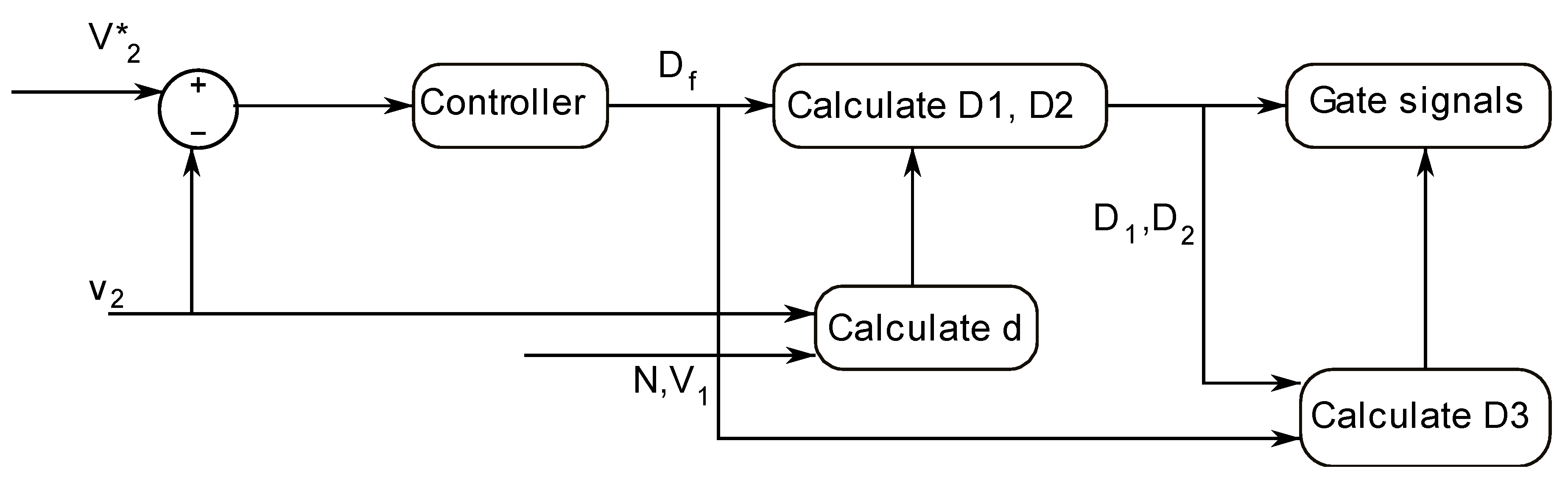
3.1. General Control Scheme for Minimum Global Reactive Power of DAB DC-DC Converter
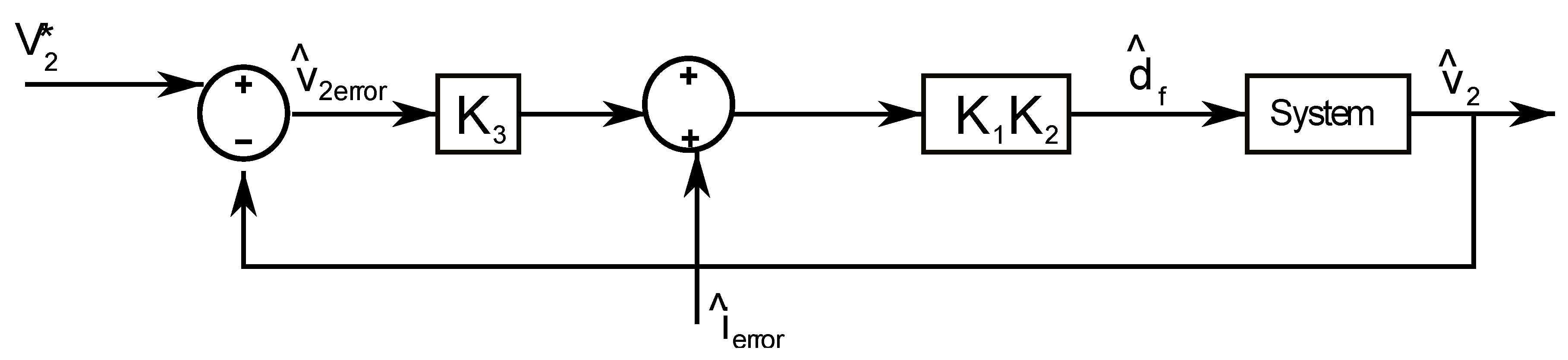
3.2. Design of Model Predictive Controller
3.3. Analysis of DAB Converter Operation under Optimal Triangular and Optimal Extended Phase Shift Modulations Using MPC
3.3.1. Optimal TrgPS Modulation
3.3.2. Optimal EPS Modulation
4. Performance Comparison of Operation under Optimal TrgPS and Optimal EPS Modulation Techniques
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mersky, A.C.; Sprei, F.; Samaras, C.; Qian, Z. (Sean) Effectiveness of Incentives on Electric Vehicle Adoption in Norway. Trans. Res. Part D Trans. Environ. 2016, 46, 56–68. [Google Scholar] [CrossRef] [Green Version]
- Matthews, L.; Lynes, J.; Riemer, M.; Del Matto, T.; Cloet, N. Do We Have a Car for You? Encouraging the Uptake of Electric Vehicles at Point of Sale. Energy Policy 2017, 100, 79–88. [Google Scholar] [CrossRef]
- Das, H.S.; Tan, C.W.; Yatim, A.H.M. Fuel Cell Hybrid Electric Vehicles: A Review on Power Conditioning Units and Topologies. Renew. Sustain. Energy Rev. 2017, 76, 268–291. [Google Scholar] [CrossRef]
- Lin, B.; Wu, W. Why People Want to Buy Electric Vehicle: An Empirical Study in First-Tier Cities of China. Energy Policy 2018, 112, 233–241. [Google Scholar] [CrossRef]
- Sarlioglu, B.; Morris, C.T.; Han, D.; Li, S. A Review of Technological Improvements for Electric Machines, Power Electronics, and Batteries for Electric and Hybrid Vehicles. IEEE Ind. Appl. Mag. 2017, 23, 14–25. [Google Scholar] [CrossRef]
- Piques, J.-D. SysML for Embedded Automotive Systems: SysCARS Methodology. In Proceedings of the Embedded Real Time Software and Systems (ERTS2014), Toulouse, France, 5–7 February 2014. [Google Scholar]
- Doufene, A.; Dauron, A.; Krob, D. 2.1.1 Model-Based Operational Analysis for Complex Systems—A Case Study for Electric Vehicles. INCOSE Int. Symp. 2014, 24, 122–138. [Google Scholar] [CrossRef] [Green Version]
- Hicham, E.H.; Ahmed, C.; Mourad, Z. Model-Based System Engineering Design of a Versatile Control Test Bench of an Electric Vehicle’s Powertrain for Educational Purpose. In Proceedings of the 2021 3rd Global Power, Energy and Communication Conference (GPECOM), Antalya, Turkey, 5–8 October 2021; pp. 233–239. [Google Scholar]
- Hadraoui, H.E.; Chebak, A.; Zegrari, M. Design of a Versatile Diagnostic Test Bench of an Electric Vehicle’s Powertrain for Educational Purpose Using a Model-Based System Engineering. E3S Web Conf. 2022, 336, 00058. [Google Scholar] [CrossRef]
- Guennouni, N.; Machkour, N.; Chebak, A. Using MBSE for Operational Analysis of Power Converter for Electric Traction. In Proceedings of the 2021 17th Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 1–4 July 2021; pp. 1–6. [Google Scholar]
- Jain, A.K.; Ayyanar, R. Pwm Control of Dual Active Bridge: Comprehensive Analysis and Experimental Verification. IEEE Trans. Power Electron. 2011, 26, 1215–1227. [Google Scholar] [CrossRef]
- Xie, Y.; Sun, J.; Freudenberg, J.S. Power Flow Characterization of a Bidirectional Galvanically Isolated High-Power DC/DC Converter Over a Wide Operating Range. IEEE Trans. Power Electron. 2010, 25, 54–66. [Google Scholar] [CrossRef]
- Huang, J.; Wang, Y.; Li, Z.; Lei, W. Unified Triple-Phase-Shift Control to Minimize Current Stress and Achieve Full Soft-Switching of Isolated Bidirectional DC–DC Converter. IEEE Trans. Ind. Electron. 2016, 63, 4169–4179. [Google Scholar] [CrossRef]
- Hou, N.; Song, W.; Wu, M. mingyi Minimum-Current-Stress Scheme of Dual Active Bridge DC-DC Converter with Unified-Phase-Shift Control. IEEE Trans. Power Electron. 2016, 31, 8552–8561. [Google Scholar] [CrossRef]
- Tong, A.; Hang, L.; Li, G.; Jiang, X.; Gao, S. Modeling and Analysis of a Dual-Active-Bridge-Isolated Bidirectional DC/DC Converter to Minimize RMS Current With Whole Operating Range. IEEE Trans. Power Electron. 2018, 33, 5302–5316. [Google Scholar] [CrossRef]
- Zhao, B.; Yu, Q.; Sun, W. Extended-Phase-Shift Control of Isolated Bidirectional DC–DC Converter for Power Distribution in Microgrid. IEEE Trans. Power Electron. 2012, 27, 4667–4680. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W. Efficiency Characterization and Optimization of Isolated Bidirectional DC–DC Converter Based on Dual-Phase-Shift Control for DC Distribution Application. IEEE Trans. Power Electron. 2013, 28, 1711–1727. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W. Power Characterization of Isolated Bidirectional Dual-Active-Bridge DC–DC Converter With Dual-Phase-Shift Control. IEEE Trans. Power Electron. 2012, 27, 4172–4176. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Sun, W. Current-Stress-Optimized Switching Strategy of Isolated Bidirectional DC–DC Converter With Dual-Phase-Shift Control. IEEE Trans. Ind. Electron. 2013, 60, 4458–4467. [Google Scholar] [CrossRef]
- Choi, W.; Rho, K.-M.; Cho, B.-H. Fundamental Duty Modulation of Dual-Active-Bridge Converter for Wide-Range Operation. IEEE Trans. Power Electron. 2016, 31, 4048–4064. [Google Scholar] [CrossRef]
- Shi, H.; Wen, H.; Chen, J.; Hu, Y.; Jiang, L.; Chen, G. Minimum-Reactive-Power Scheme of Dual-Active-Bridge DC–DC Converter With Three-Level Modulated Phase-Shift Control. IEEE Trans. Ind. Appl. 2017, 53, 5573–5586. [Google Scholar] [CrossRef] [Green Version]
- Shao, S.; Jiang, M.; Ye, W.; Li, Y.; Zhang, J.; Sheng, K. Optimal Phase-Shift Control to Minimize Reactive Power for a Dual Active Bridge DC–DC Converter. IEEE Trans. Power Electron. 2019, 34, 10193–10205. [Google Scholar] [CrossRef]
- Zhao, B.; Song, Q.; Liu, W.; Liu, G.; Zhao, Y. Universal High-Frequency-Link Characterization and Practical Fundamental-Optimal Strategy for Dual-Active-Bridge DC-DC Converter Under PWM Plus Phase-Shift Control. IEEE Trans. Power Electron. 2015, 30, 6488–6494. [Google Scholar] [CrossRef]
- Syed, I.; Xiao, W.; Zhang, P. Modeling and Affine Parameterization for Dual Active Bridge DC-DC Converters. Electric Power Compon. Syst. 2015, 43, 665–673. [Google Scholar] [CrossRef]
- Li, K.; Yang, Y.; Tan, S.-C.; Hui, R.S.-Y. Sliding-Mode-Based Direct Power Control of Dual-Active-Bridge DC-DC Converters. In Proceedings of the 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019; pp. 188–192. [Google Scholar]
- Tiwary, N.; Venkataramana, N.N.; Panda, A.K.; Narendra, A. Direct Power Control of Dual Active Bridge Bidirectional DC-DC Converter. In Proceedings of the 2019 International Conference on Power Electronics, Control and Automation (ICPECA), New Delhi, India, 16–17 November 2019; pp. 1–4. [Google Scholar]
- Borreggine, S.; Monopoli, V.G.; Rizzello, G.; Naso, D.; Cupertino, F.; Consoletti, R. A Review on Model Predictive Control and Its Applications in Power Electronics. In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; pp. 1–6. [Google Scholar]
- Karamanakos, P.; Liegmann, E.; Geyer, T.; Kennel, R. Model Predictive Control of Power Electronic Systems: Methods, Results, and Challenges. IEEE Open J. Ind. Appl. 2020, 1, 95–114. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage Gain | Power | Duty Ratios |
|---|---|---|
| Voltage Gain | Duty Ratio between Fundamentals Df | Duty Ratios |
|---|---|---|
| Constraints | Optimal TrgPS | Optimal EPS |
|---|---|---|
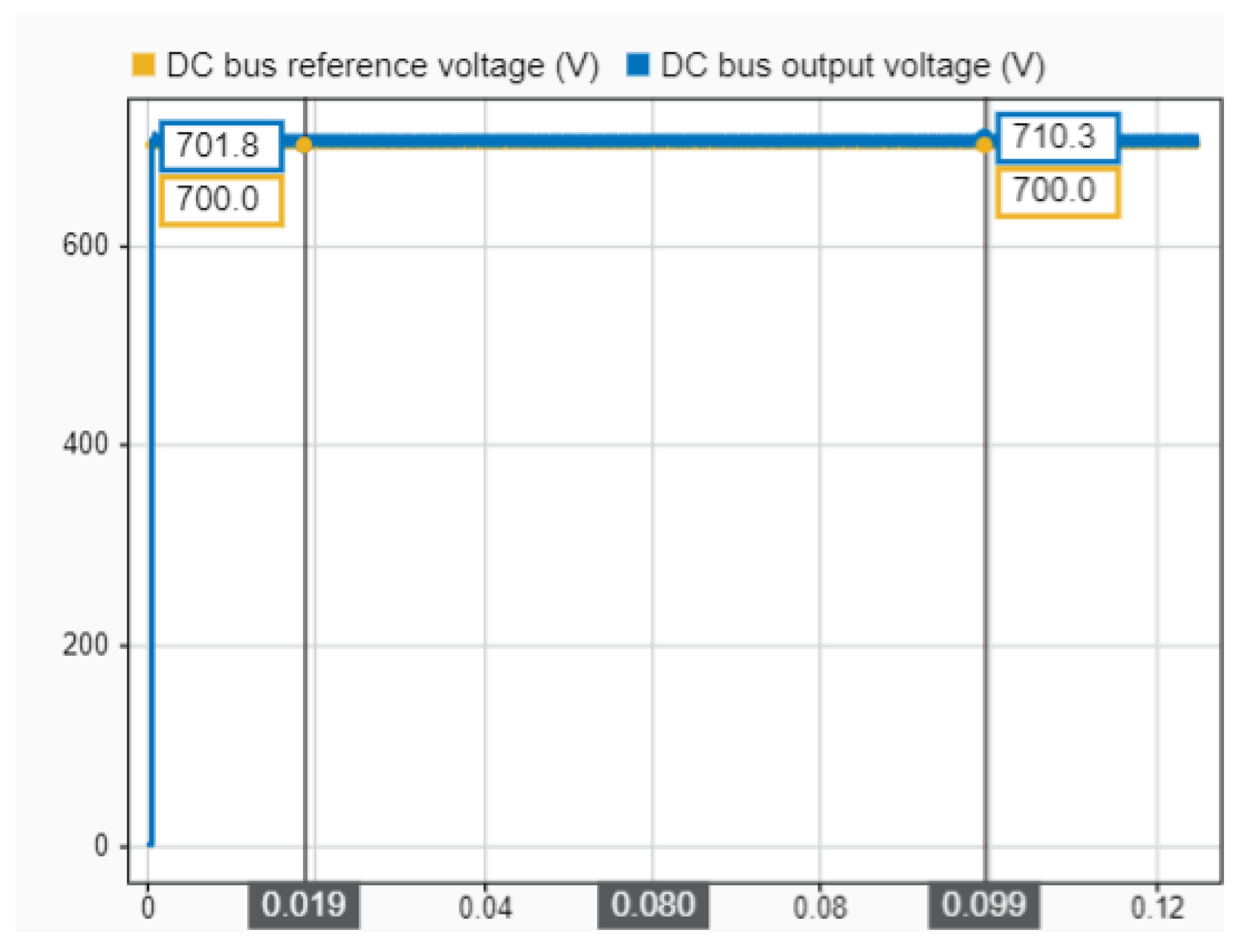
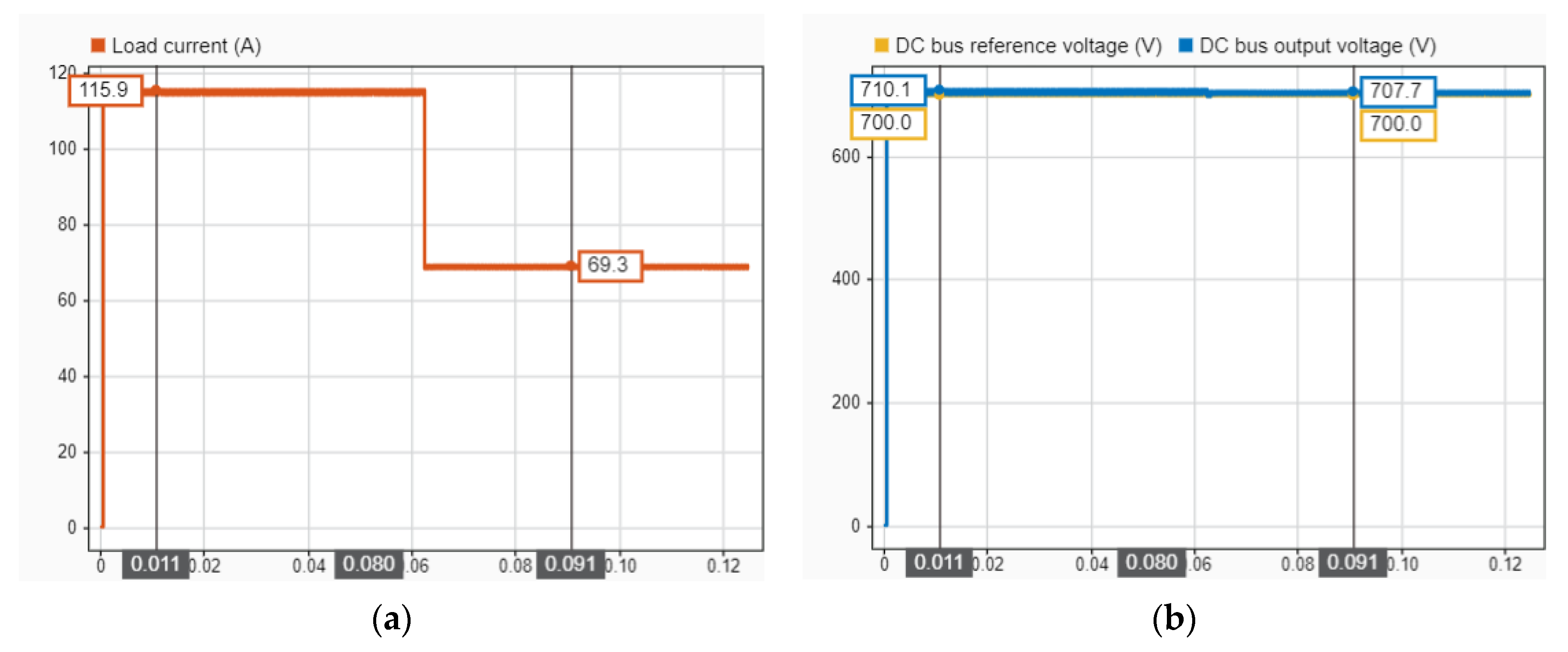
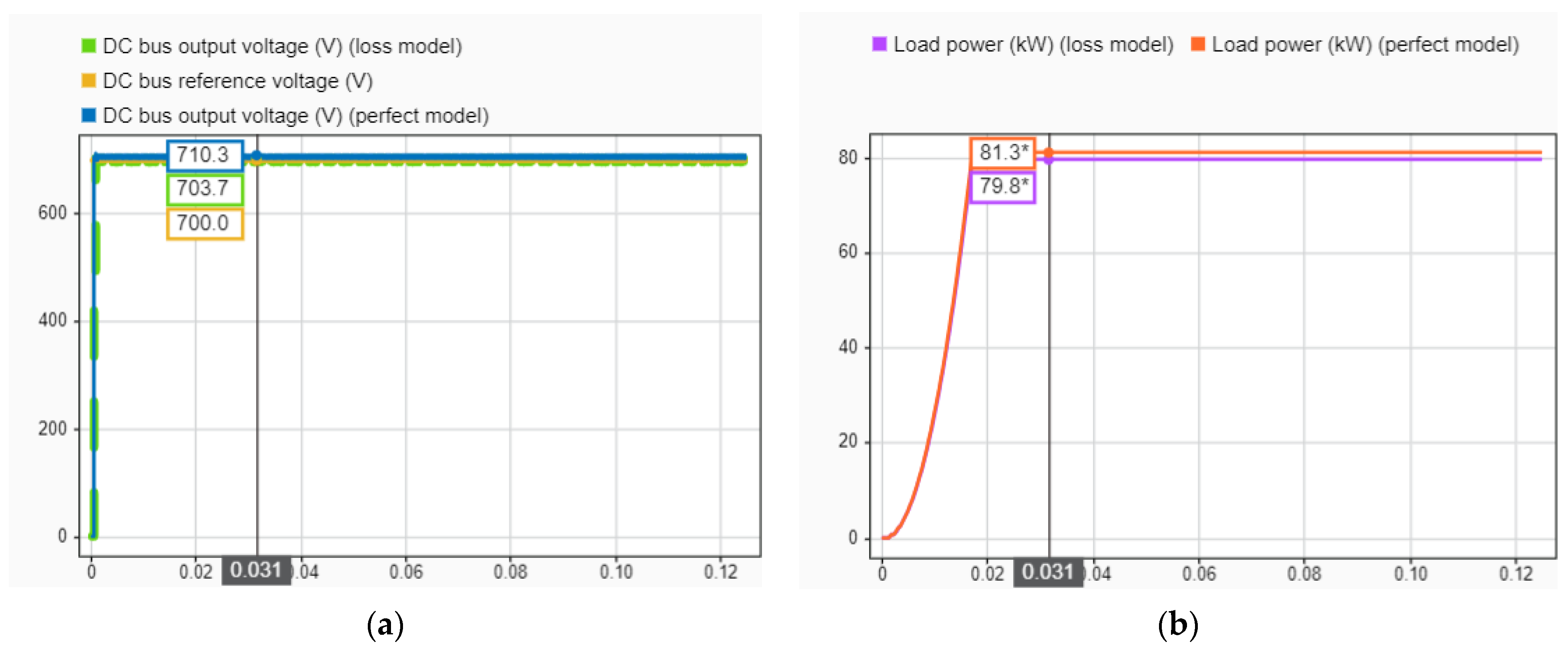
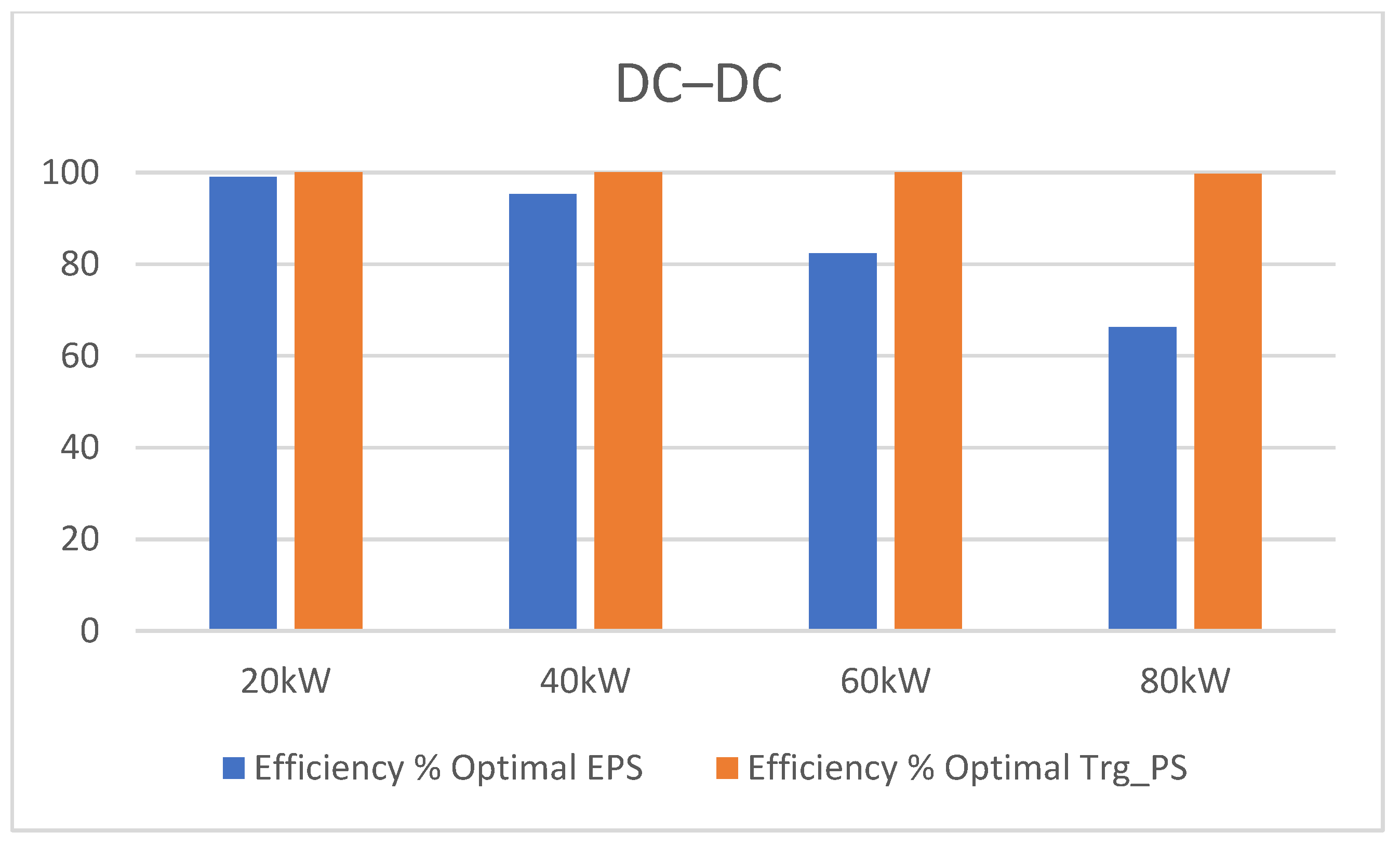
| Reference voltage tracking | Negligible error for both heavy and light loads | Important error for both heavy and light loads (the error increases drastically for heavy loads) |
| Power losses | Negligible | Acceptable for light loads (but still important when quantified), not acceptable for heavy load |
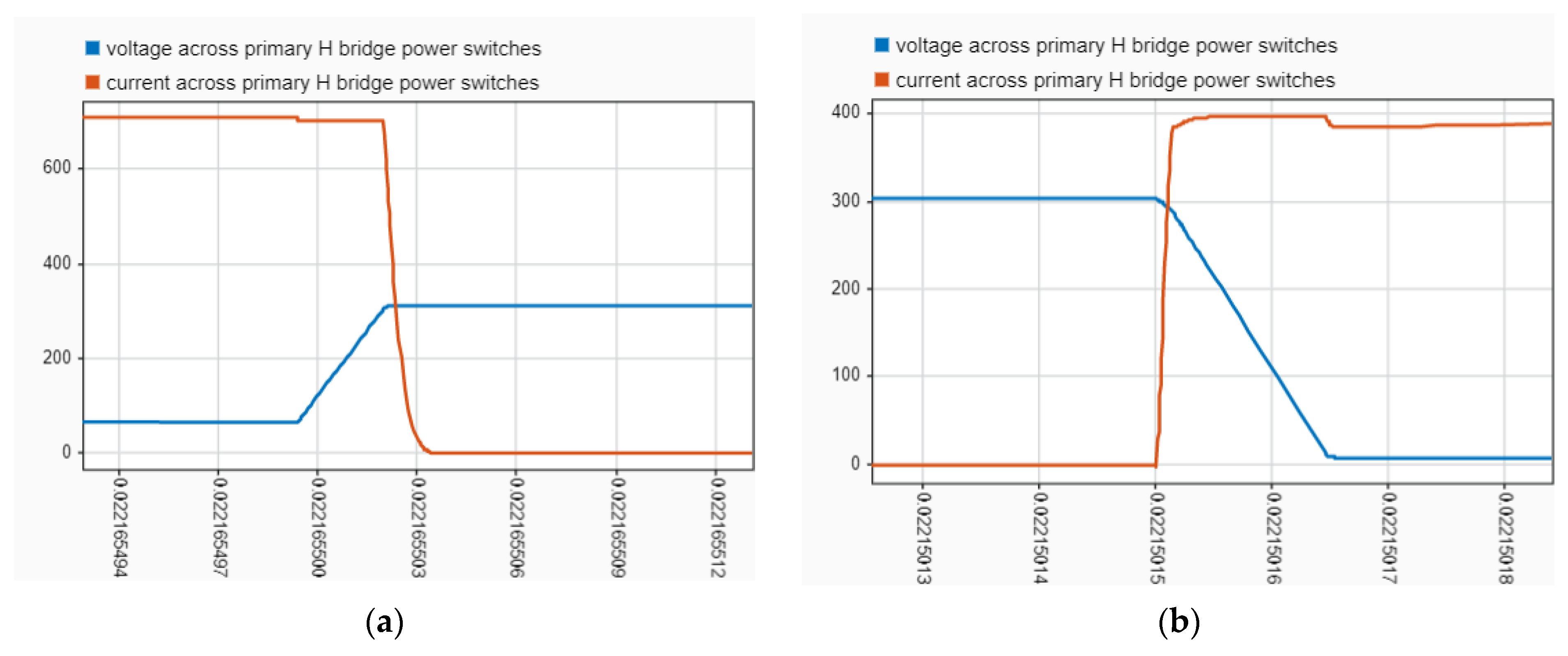
| Soft switching | ZVS-on only for secondary H-Bridge | ZVS-on for both primary and secondary H-Bridge |
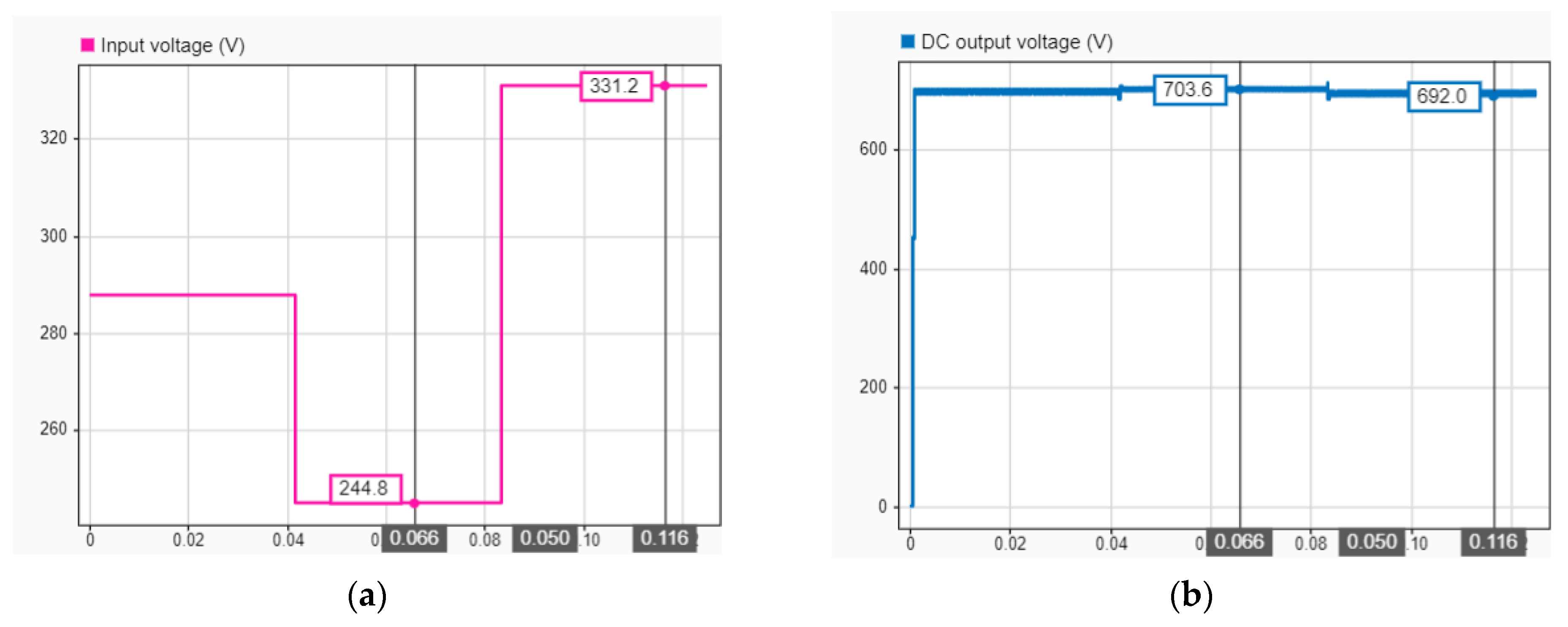
| Input voltage disturbance effect | Does not affect the operation | Affects the operation drastically |
| Circuit Parameters | EPS Operation | TrgPS Operation | Variation with Respect to EPS (Per Unit) |
|---|---|---|---|
| Inductance (µH) | 3.15 | 1.57 | −0.502 |
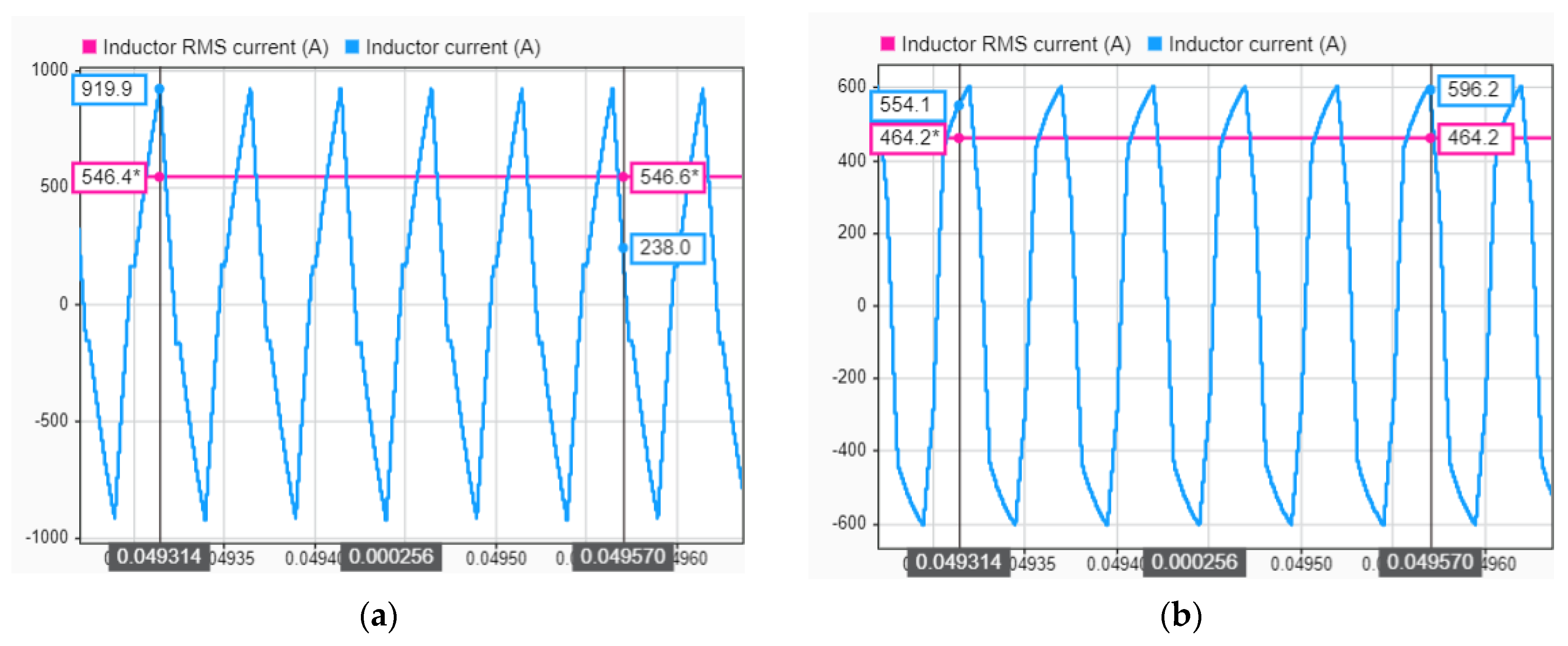
| Peak current (A) | 596 | 920 | +0.54 |
| RMS current (A) | 564 | 546 | −0.032 |
| Primary RMS voltage (V) | 270 | 254 | −0.06 |
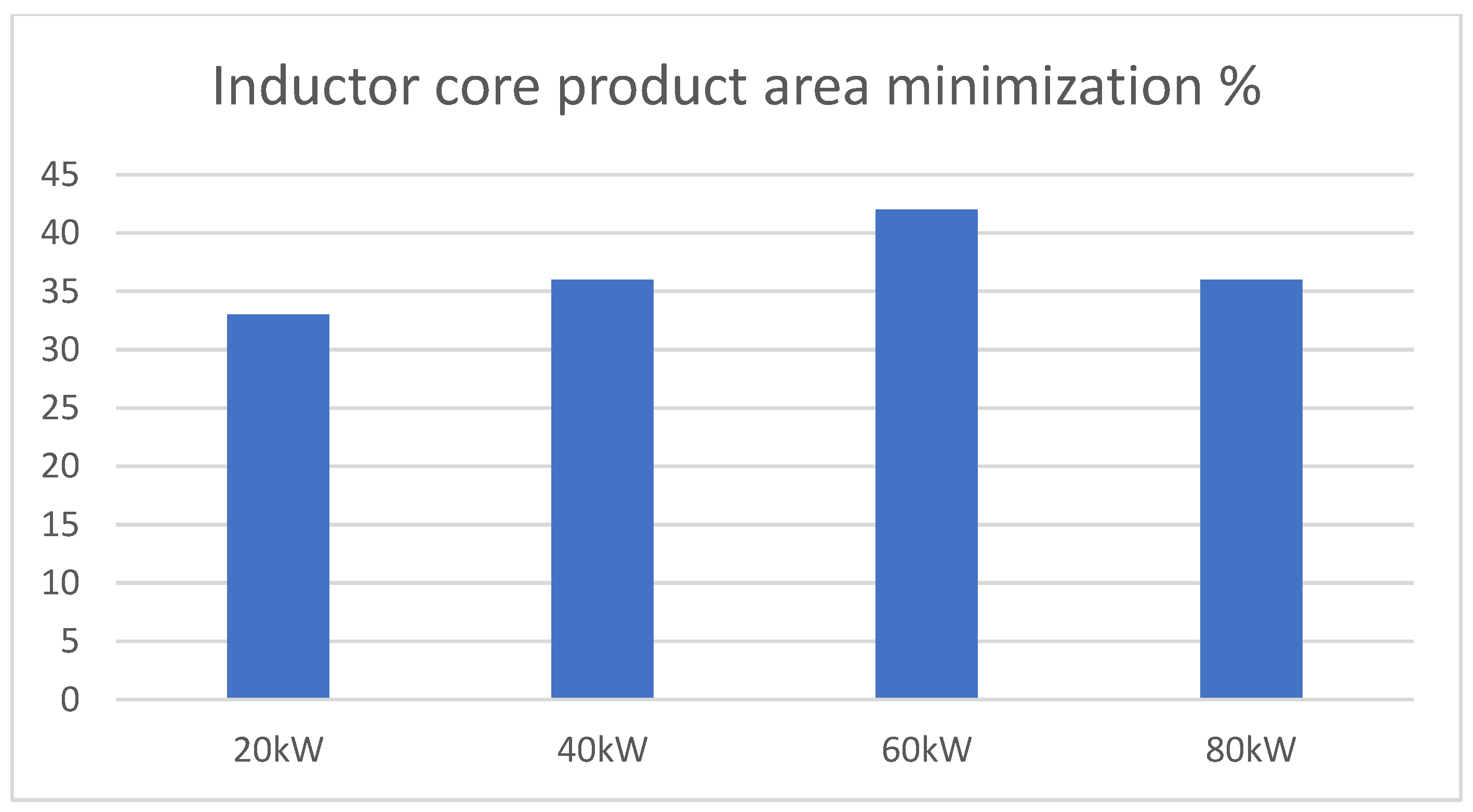
| Inductor’s core product area (per unit) | 1 | 0.74 | −0.36 |
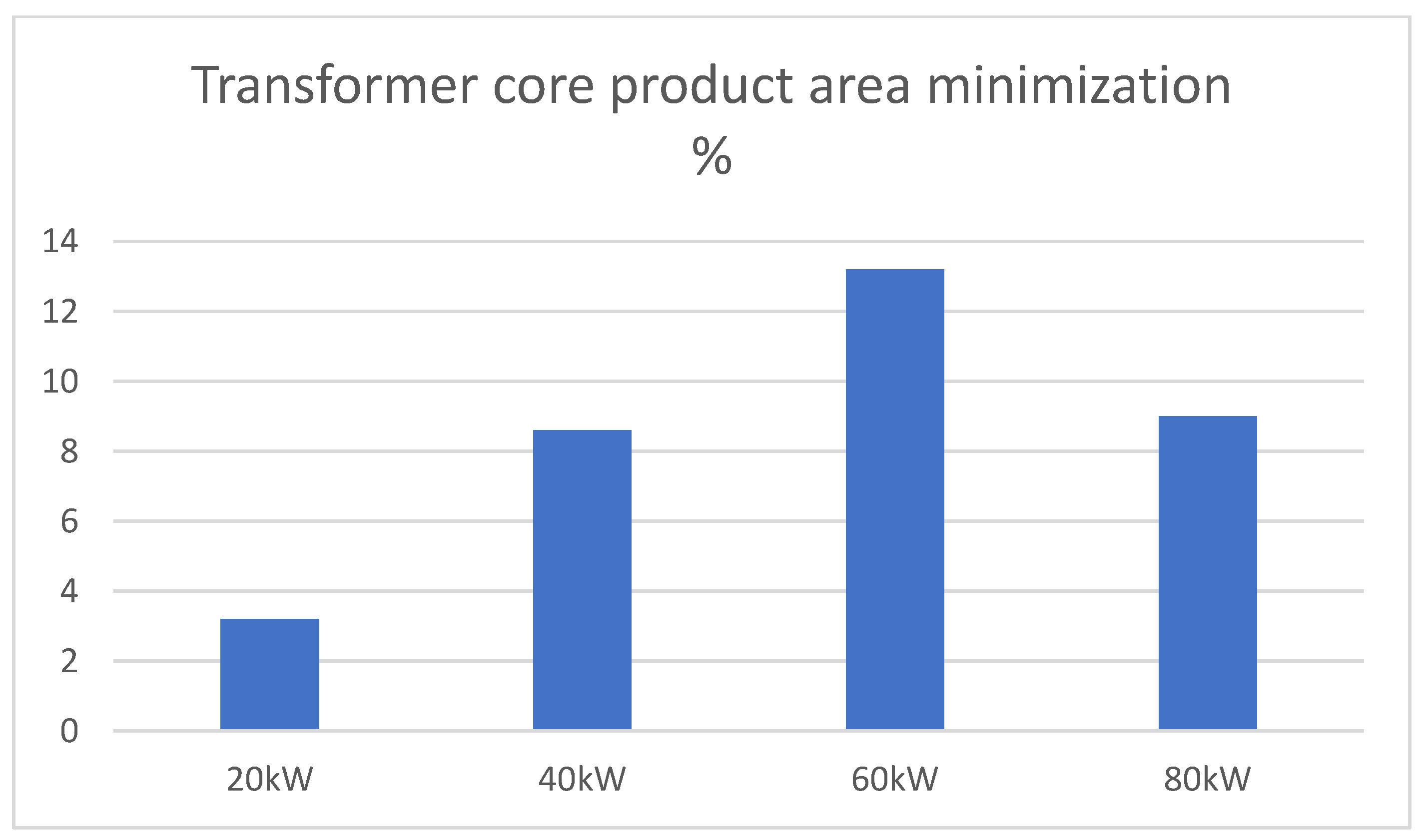
| Transformer’s core product area (per unit) | 1 | 0.91 | −0.09 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guennouni, N.; Chebak, A.; Machkour, N. Optimal Dual Active Bridge DC-DC Converter Operation with Minimal Reactive Power for Battery Electric Vehicles Using Model Predictive Control. Electronics 2022, 11, 1621. https://doi.org/10.3390/electronics11101621
Guennouni N, Chebak A, Machkour N. Optimal Dual Active Bridge DC-DC Converter Operation with Minimal Reactive Power for Battery Electric Vehicles Using Model Predictive Control. Electronics. 2022; 11(10):1621. https://doi.org/10.3390/electronics11101621
Chicago/Turabian StyleGuennouni, Nasr, Ahmed Chebak, and Nadia Machkour. 2022. "Optimal Dual Active Bridge DC-DC Converter Operation with Minimal Reactive Power for Battery Electric Vehicles Using Model Predictive Control" Electronics 11, no. 10: 1621. https://doi.org/10.3390/electronics11101621
APA StyleGuennouni, N., Chebak, A., & Machkour, N. (2022). Optimal Dual Active Bridge DC-DC Converter Operation with Minimal Reactive Power for Battery Electric Vehicles Using Model Predictive Control. Electronics, 11(10), 1621. https://doi.org/10.3390/electronics11101621