1. Introduction
Since the middle of the last century, proportional-integral-derivative (PID) controllers have been used in the control of many industrial processes. During the 1940s, Ziegler and Nichols [
1] launched the famous method for tuning PID controllers based on the transient response characteristic of a given plant. Following them, many engineers and scientists developed adjustment methods applied to the synthesis of PID controllers [
2,
3,
4,
5].
The fractional calculus is also a well-known theory and can solve a lack of answers about integer calculus [
6]. However, due to the extremely high computational cost, it has been neglected for digital implementations. Nonetheless, nowadays, hardware constraints and computing costs are no more preventive issues for embedded systems [
7]. Thus, applications using fractional order controllers have become doable and lines of research focused on control optimization are feasible for non-integer degrees. Recently, many works have been published with tuning Fractional Order PID (FOPID) techniques in different subjects exploring the higher range of the fractional parameters [
8,
9,
10,
11,
12,
13].
As regards [
14], a FOPID controller based on Queen Bee Assisted Genetic Algorithm (QBGA) was designed to outperform the PID controller when parameter variations are applied. Again, the superiority of the FOPID is remarkable; nevertheless, the paper makes no study related to load disturbances and capacitance variations. In addition, no optimized search range of parameters was introduced to the algorithm. Ref. [
15] compared the start-up performance and step response of optimal PID and optimal FOPID controllers applied to the non-linear boost converter with the Artificial Bee Colony (ABC) algorithm as the tuning method to find the FOPID parameters. The non-linear boost converter feature of [
15] was designed by the SIMULINK Simscape tool and the Bee Colony algorithm ran online to achieve sub-optimal parameters, but no robustness evaluations were made regarding parameter deviation. Ref. [
16] designed and implemented a digital FOPID controller applied to a linearized boost converter, such that a procedure to design the parameters of a FOPID controller was given together with a discretized DSP-based control algorithm and tested under different load conditions. Despite being an interesting approach, the FOPID proposed in [
16] utilized two sensors, i.e., voltage and current sensors, along with a non-optimized population range, increasing the computational burden and making hardware synthesis more expensive. Moreover, it was also recommended to use
, with
and
to guarantee closed-loop stability, showing a small range of optimal solutions for the proposed method. The approximation of a non-integer order PID-type controller to regulate the output voltage of a DC-DC Boost converter is proposed in [
17]. The Laplacian operator biquadratic approximation was utilized such that a flat phase response in a range around a center frequency is obtained, aiming at the iso-damping response of the controlled system. Experimental results were also presented to assert the good performance and regulation for the non-minimum phase Boost system. However, again, no study related to load disturbances and parameter variations was performed. In our work, a comprehensive analysis of all parameters variation and load disturbance applied to a DC-DC Boost converter controlled by the FOPID controller is presented. None of the works in the related literature explored such a complete study as well as included zero over/undershoot under closed-loop performance.
Among the optimization algorithms, the Genetic Algorithm (GA) is commonly used to generate high-quality solutions for optimization problems within a well-known range of parameters whose small amount of system information is enough to find large solutions space [
18]. By using GA, this manuscript assays the FOPID controller synthesis of a fixed-frequency DC-DC Boost converter with no necessity for complex equations. The control intends to drive the power switch with a duty cycle in such a way that the output voltage reproduces the desired nominal voltage. This tracking needs to be sustained even under input voltage disturbances and load variations, keeping the project requirements during transients. The more common control techniques used in practice are based on PI-type controllers that are tuned on the basis of linearized averaged models employing voltage or current control in either one or two-loop control [
19]. However, those approaches provide deficient overshoot voltage responses and poor settling times for load disturbance situations [
20]. Here, the proposed FOPID based on GA can achieve a lower overshoot (lower than 1%) with a suitable settling time owing to the wider fractional parameters range accepted by the new proposed topology (
).
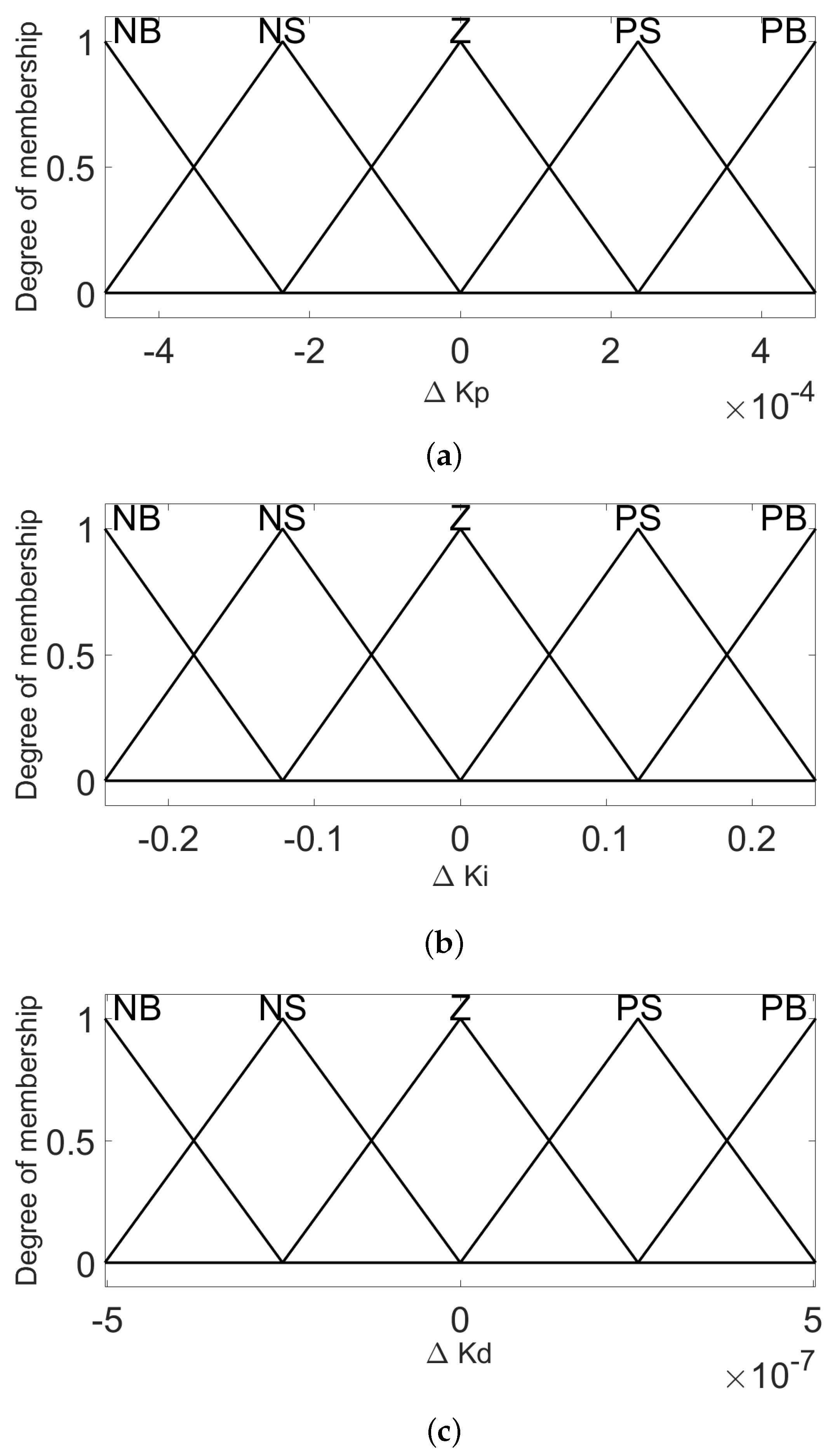
Fuzzy logic resembles the human behavior of decision by using a set of linguistic variables denoted by membership functions and their shapes. According to fuzzy implication functions and an inference system, a fuzzy logic controller (FLC) can be designed when a set of inference rules are created to translate some action and its rate in fuzzy linguistic variables and “defuzzificate” them to obtain a crisp solution. This human behavior feature of the FLC exhibited success to control nonlinear and linear systems [
21]. In this manuscript, GA ran to achieve optimal parameters that are the output membership functions center of the universe of discourse. One can say that a huge contribution of the FLC is to adapt the system when it is under disturbances. Ref. [
22] designed an FLC to use the system error and derivative of the error inputs to obtain the scaling factor of the proportional, integral, and derivative terms of a predefined FOPID controller during its operation. The adaptive method provided by the fuzzy system improved the dynamic performances of the FOPID controller through which the controller may respond quickly to disturbances upon the control variable, but the FOPID design was made with the FOMCON toolbox and without any optimized population of initial FOPID parameters. To enhance all FOPID achievements, a fuzzy FOPID is designed with better robustness against parameters variation and load disturbances in an operational range from almost no power to 150% full power, for the voltage control of the DC-DC Boost converter, thus fulfilling the wider functionality of electronic designs. It is important to highlight that the proposed controller topology achieved such outstanding performance with only one voltage sensor. More works related to fuzzy strategy to mitigate real-time disturbances can be found in [
23,
24].
This paper proposes the application of a genetic algorithm (GA) in a new FOPID topology that overcomes the startup undershoot problem in the voltage output of a DC-DC Boost converter. Furthermore, a fuzzy logic controller was designed with gain parameters of the FOPID-based GA as the center of the universe of discourse to tune online the gain parameters of the proposed Fuzzy FOPID (FFOPID). The proposed approach revealed superior robustness in comparison with traditional controllers. Based on those facts, the achievements of this paper are:
The insertion of a FOPID into the closed-loop control of a DC-DC Boost converter to improve the robustness against capacitance and inductance deviations when the load resistance is changed during operation, without the insertion of high complexities in the controller synthesis;
A new FOPID topology that overcomes the over/undershoot problem of the voltage-loop DC-DC Boost by guaranteeing the closed-loop system with initial zero derivative;
A fuzzy logic controller is used to self-tuning the gain parameters of the FOPID to enhance its controllability as related to disturbance injection.
Finally, comparisons among the proposed fuzzy logic FOPID controller with several conventional controllers were performed, such as PI controller, type II compensator and current mode controller. In all cases, the proposed controller outperformed those controllers regarding load disturbances and parameters variations.
This manuscript is organized as follows. The materials and methods are outlined in
Section 2 by introducing the definition of the Oustaloup Filter, basic concepts of fractional calculus, and the DC-DC Boost converter plant. Further, the control approach is proposed for the DC-DC Boost converter model along with the GA implementation and its operation regarding Integral of Time-Weighted Absolute Error (ITAE) and Integral of Time-Weighted Square Error (ITSE) indexes optimizations as cost functions in this section as well. An FLC is also designed for online updating the FOPID gain parameters.
Section 3 includes simulations of the DC-DC Boost converter tuned with the FOPID controller for steps responses and regulatory cases of load, capacitance, and inductance, comparing its robustness with other acquaintance controllers. Moreover, the undershoot rejection is presented in this section as well. In addition, enhancement of the fuzzy fractional-order PID (FFOPID) is shown in comparison with FOPID performance indexes under steps on control variables. A comparative discussion is developed in
Section 4. Finally, our final remarks are stated in
Section 5.
3. Results
In this section, simulation results demonstrating potential advantages of the proposed control methodology are presented using the SIMULINK/MATLAB 2021a platform. For comparison purposes, gain crossover frequencies (
) and phase margins (
) of PI, Type II and Current Mode controllers are related in
Table 8.
As mentioned in the context of robustness necessity with load disturbance, the overshoot was defined to be lower than 1% and the settling time lower than 0.05 s. By doing so, PI and Type II controllers were also designed with overshoots lower than 1% and the smallest possible settling time. For the current mode controller,
is typically set to be
of the switching frequency for the current loop and consequently the same for the voltage loop. Thus, aiming for robustness instead of speed, the lower
has been chosen along with
[
40]. The upper limit of the integral performance indices is chosen as 0.1 s. Moreover, the Oustaloup filter order chosen was
with frequency resolution
rad/s. The best solution related to load disturbance robustness among all simulations found is given in
Table 9.
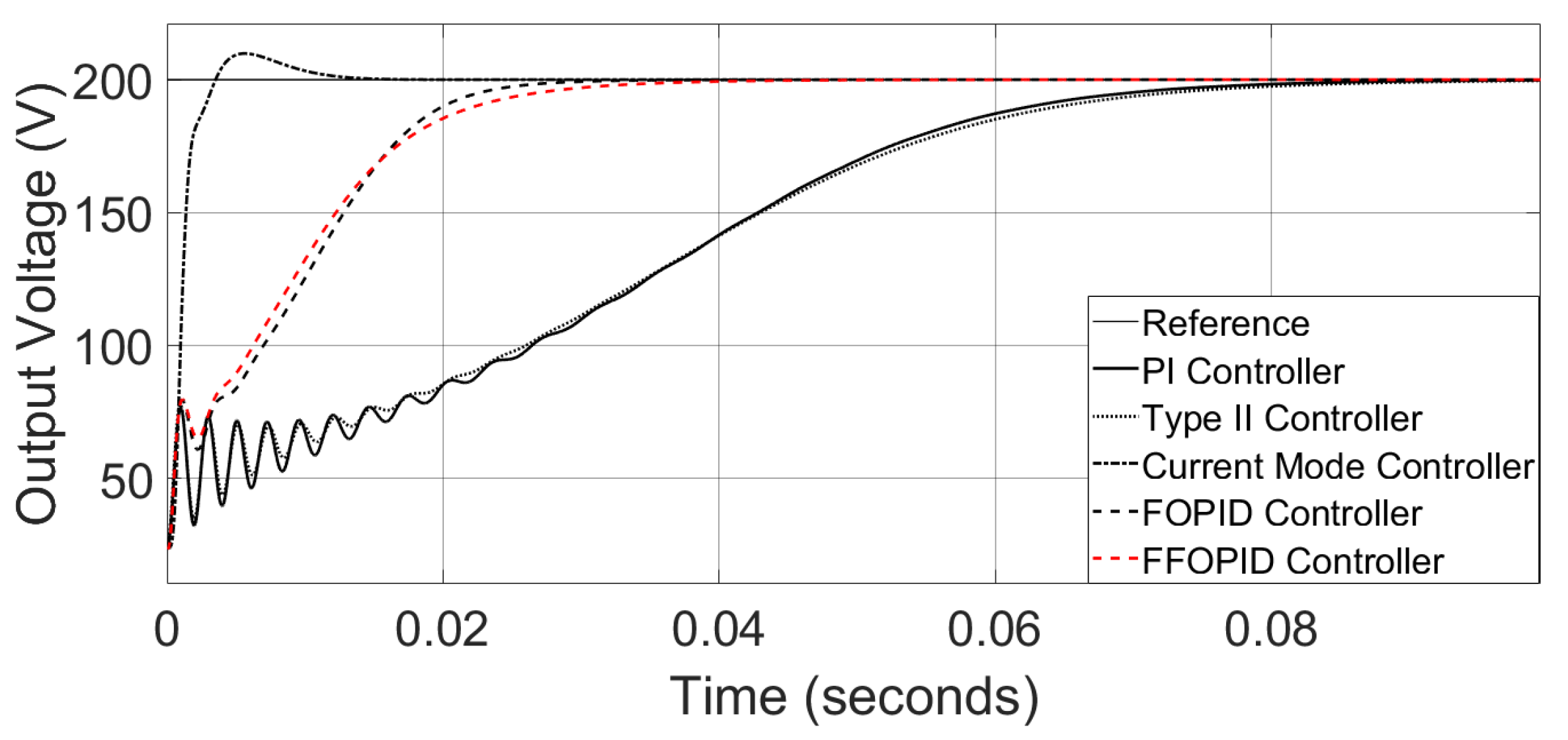
The first case to be analyzed is the transient behavior during startup. Applying an input voltage of 200 V,
Figure 8 depicts step responses of different controllers during startup. Notice that the FFOPID controller respects the maximum voltage overshoot of
while the Current Mode controller reaches
. However, this trade-off is remarkable with the rise time.
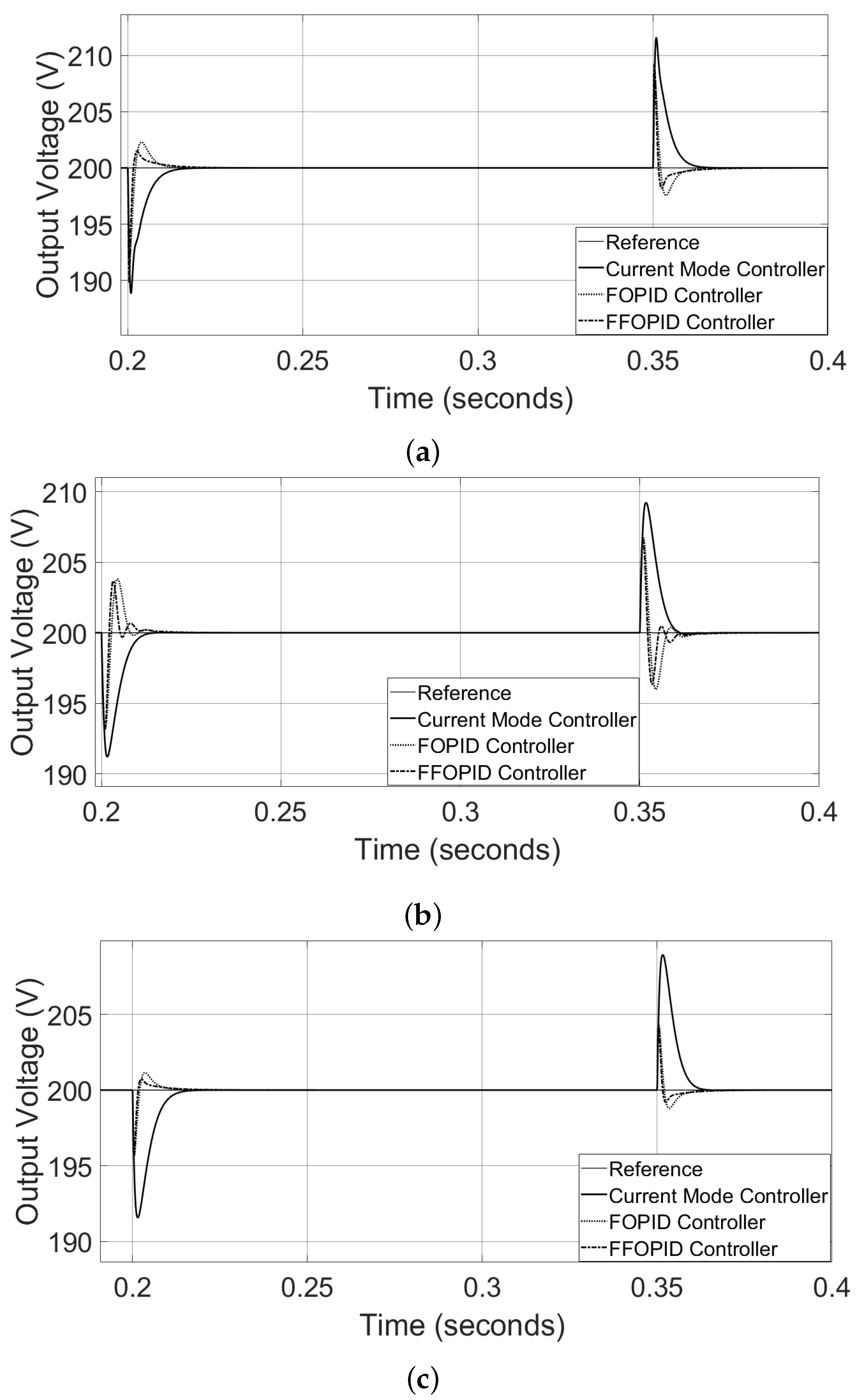
As regard to the second case, the load disturbance was analyzed. The resistance R was changed by a step response after 200 and 350 ms from the startup.
Figure 9a shows the voltage response over the R disturbance from
to
and
Figure 9b from
to
. It is remarkable that the FFOPID controller has the fastest stability over the load disturbance through
Figure 9a–d, even with only one voltage sensor. When the load disturbance is changed towards the above, it is noticeable that the FFOPID controller is still stable for high resistances as seen in
Figure 10 while the Current Mode Controller is unstable. The PI controller was not drawn due to their high instability. The changing load from
to 10 k
represents the operation from full load to a practically non-load. No conventional controllers can handle such high disturbance and thus, the viability of the proposed FFOPID controller is demonstrated.
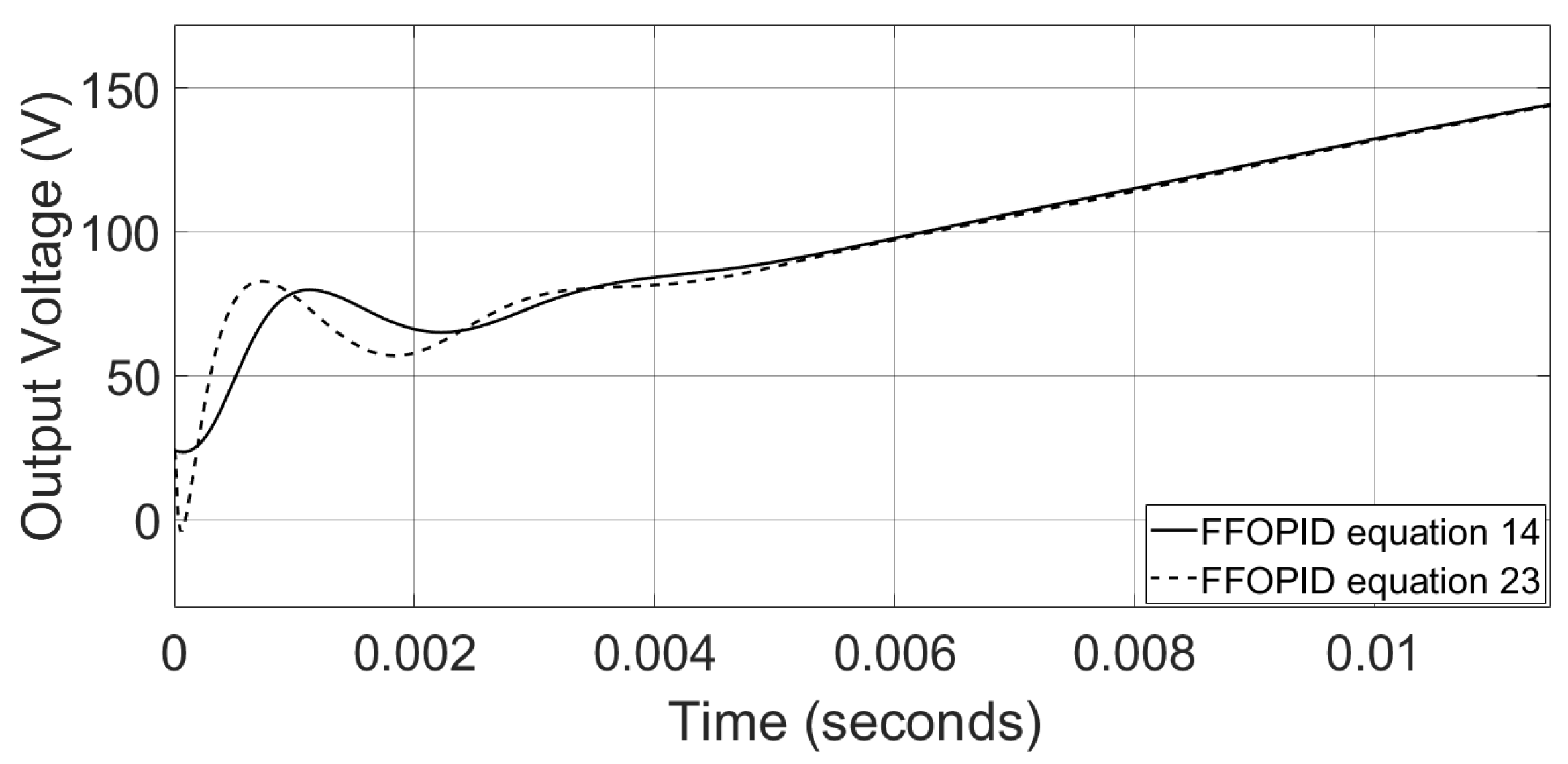
The third case concerns the initial voltage behavior on the startup between the FFOPID controllers in (
16) and (
25).
Figure 11 shows the undesirable undershoot voltage of the controller in (
25). From such findings, (
16) can remove the initial plant non-minimum phase effect.
The fourth case tests the robustness of the FFOPID controller against the Current Mode controller due to capacitance and inductance deviations when load resistance is switched during its operation. The startup capacitance deviation is under
of its nominal value and the startup inductance is under
of its nominal value. The resistance R was changed by a step response after 200 ms from the startup of
to
and after 350 ms from
to
. From
Figure 12a–d, the FFOPID controller is shown to be the most robust controller against plant parameters deviations.
Finally, the last case assesses the enhancement of the FFOPID against the FOPID under step control variable disturbances at the instant
s, without capacitance and inductance deviations. With the online updating of the gain parameters provided by the FLC, a relative improvement in amplitude of
of the FFOPID against the FOPID when a step control variable disturbance of
from the nominal Duty Cycle is applied can be seen in
Figure 13a. In
Figure 13b, a relative enhancement is found in the amplitude of
of the FFOPID against the FOPID when a step control variable disturbance of
from the nominal Duty Cycle is applied. By performance indexes comparison, besides ITAE and ITSE, the Integrated Absolute Error (IAE) and the Integrated Squared Error (ISE) were deployed to measure the behavior of the FFOPID and FOPID controllers during the control variable disturbance event of
from the nominal Duty Cycle.
Table 10 shows these indexes when the time is measured from
to
s and sampled with
s.
One can notice that the FFOPID controller is not more robust than the FOPID controller only with the ITAE measurement rule due to its lower settlement time. However, the others reveal the FFOPID controller superiority over the FOPID controller.
4. Discussion
The dynamical and phase margin specifications measured for the proposed FOPID were
rad/s and
, respectively. The phase margin achieved in this manuscript is almost analogous to the FOPID designed in [
17], showing that, with no direct assignment of phase margin specification, the proposed method matched robust phase margin against disturbances. Besides, it is remarkable that the amount of parameter variation analysis in this manuscript enhances the robustness study of FOPID for DC-DC Boost converters in the literature. However, the limitation of the proposed method regarding the one in [
17] is its huge closed-loop transfer function size with a 30th order, yielding problems for hardware implementation such as higher memory requirements and physical space.
One of the key results of the FFOPID proposed is its robustness operation upon low power, i.e., full load to non-load, as seen in
Figure 10. This feature is pertinent because even with a load as 10 K
, the converter demonstrates a wide operational range along with high power regulation comparisons up to 50% above its power specification.
The zero initial voltage and its derivative for any range over derivative and integral fractional order of the proposed FOPID topology demonstrated the effectiveness of zero undershoot for the non-minimum phase DC-DC Boost converter when system standardization is pre-assumed. This feature allows the range of search in GA as related to
and
for values above one, increasing the range possibility when compared to [
14,
16,
17]. It is worth mentioning the regulation superiority of the proposed controller when simulating different startup reactive parameters along this manuscript while loads disturbances occurred, concluding the high robustness of the proposed FFOPID controller.
Finally, it is important to highlight that our work proposed a novel FOPID topology with higher robustness than the previous works in the literature for a wide operational range (power and components deviation). The disadvantages of the previous works are basically based on the usage of two sensors, no robustness analysis or a restricted range of optimal solutions, overshoots or poor settling times.
5. Conclusions
A GA-based FOPID controller tuning has been designed and applied to a DC-DC Boost converter. From the simulations studied, it is noticeable that the optimized controller parameters obtained by implementing the proposed algorithm with a probabilistic constraint in the weighted of ITAE and ITSE as performance indices have reached better controllability for load disturbance, and, greater setpoint tracking as regards the others due to parameters deviation of the system caused by the prolonged use of the equipment regarding controllers in voltage and current modes. It is also remarkable that the range of parameters deviation in this manuscript is higher than the standard deviation of , generally applied in power electronics designs, showing applicability for worst conditions.
In addition, the purpose of removing the voltage undershoots for all the ranges was achieved as seen in
Figure 11, demonstrating the feasibility of the proposed FFOPID controller. It is important to highlight the full range operation of the converter, i.e., full load and non-load with remarkable transients using only one voltage sensor (
Figure 10). The reduction of sensors is in demand in both the academic world and industry. Finally, the FFOPID controller outperformed the FOPID controller in dynamic operation even upon
deviation of the nominal duty cycle. Future research of this topic should be into the size reduction of the proposed FOPID using norm-2 and embedding it in an FPGA device to perform FPGA-in-the-loop simulations and applications in a prototype.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}