
Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles


Abstract
:1. Introduction
2. Fundamentals of Path-Planning Algorithms
2.1. A* Algorithm
2.2. Artificial Potential Field
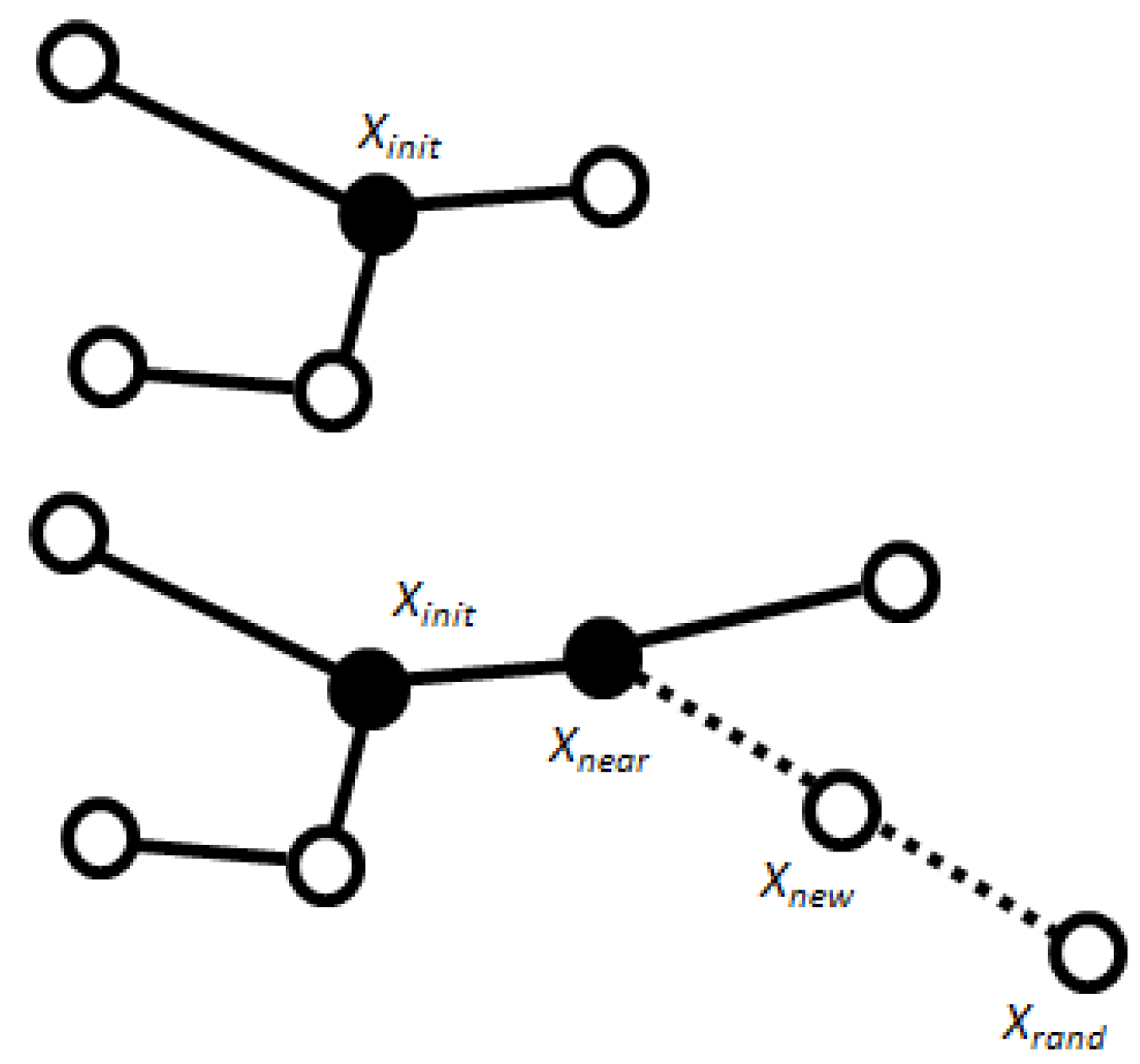
2.3. Rapidly Exploring Random Tree
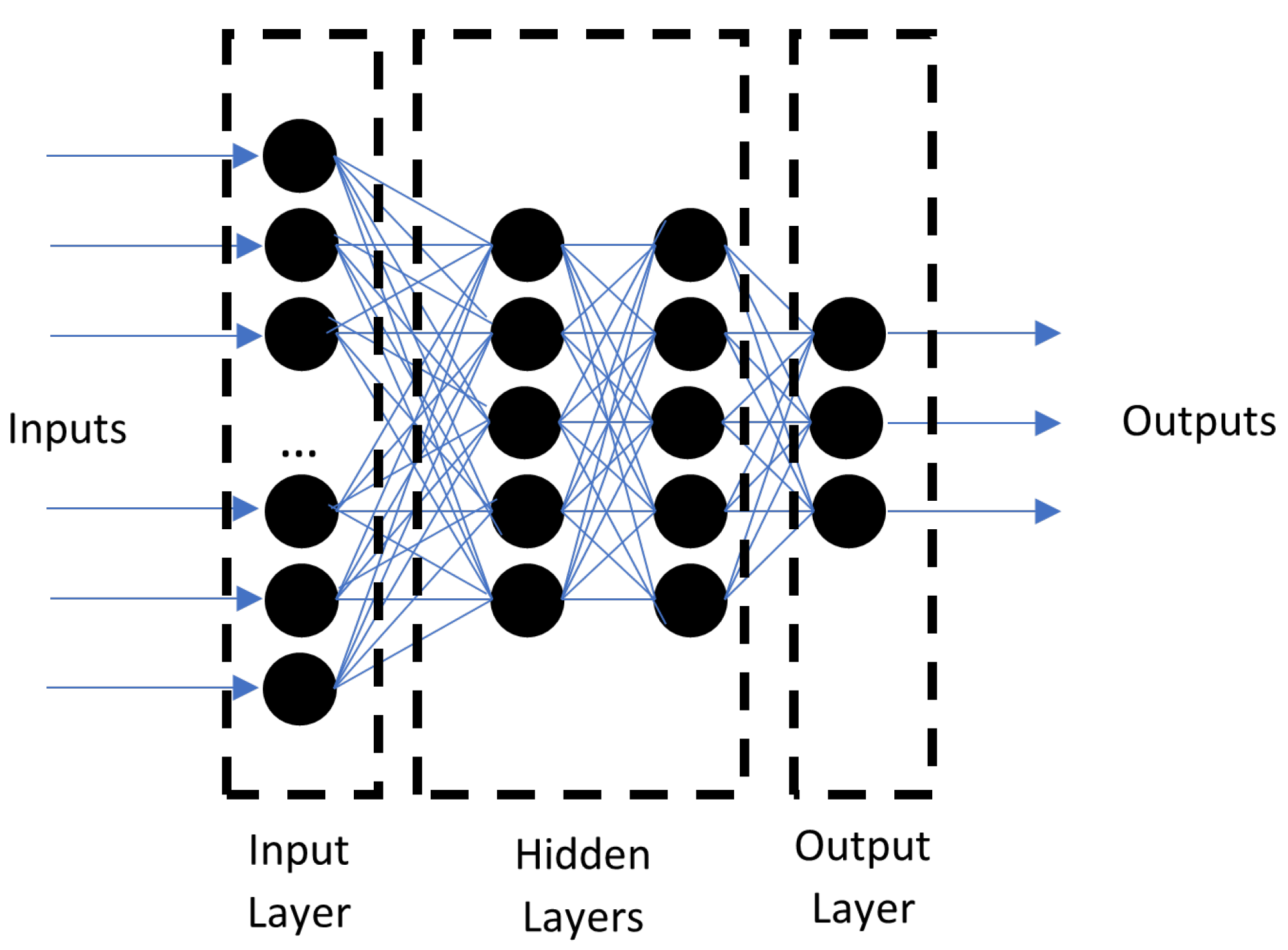
2.4. Artificial Neural Network
2.5. Genetic Algorithm
2.6. Fuzzy Logic
2.7. Reinforcement Learning
2.8. Comments
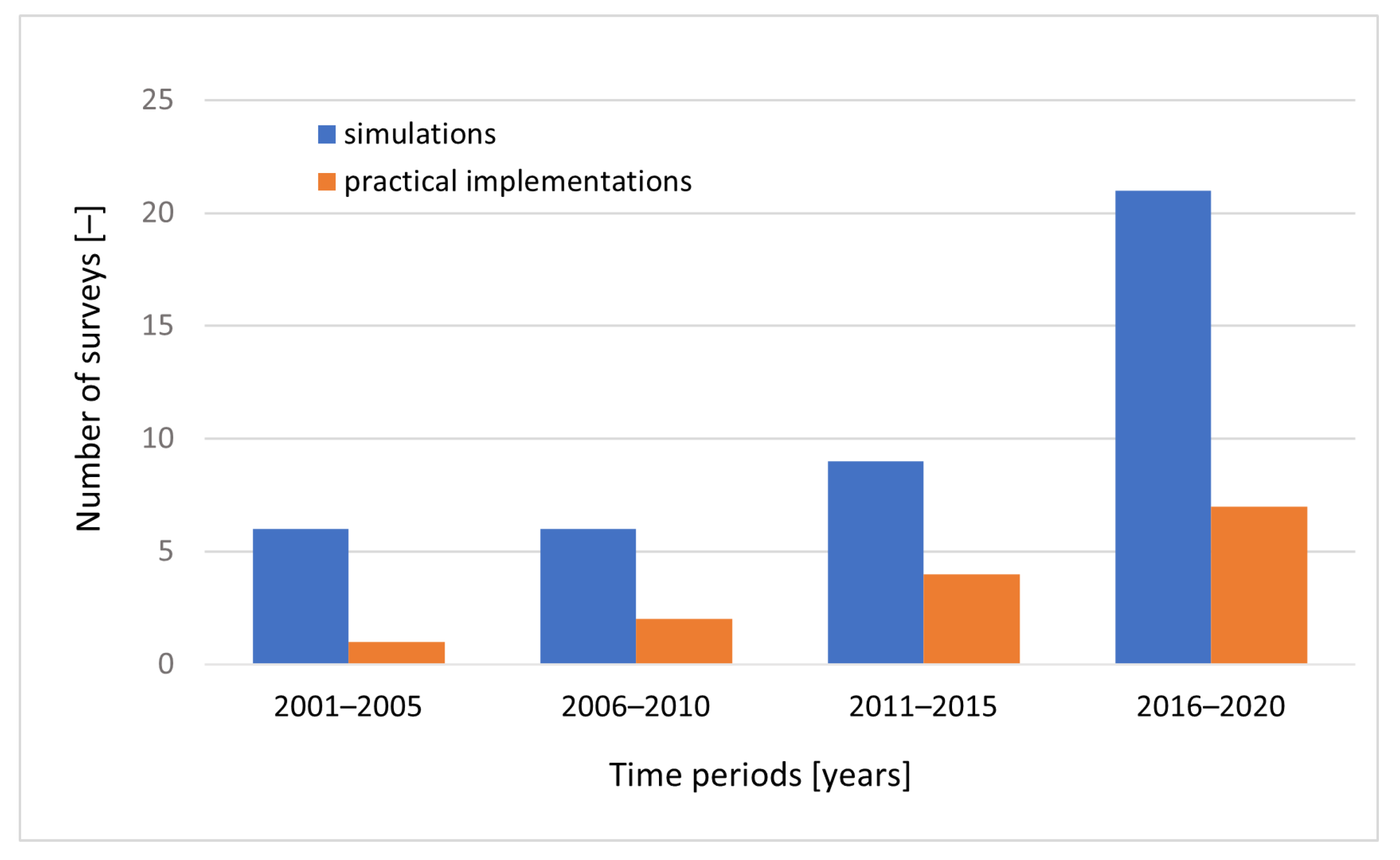
3. Chronological State of the-Art
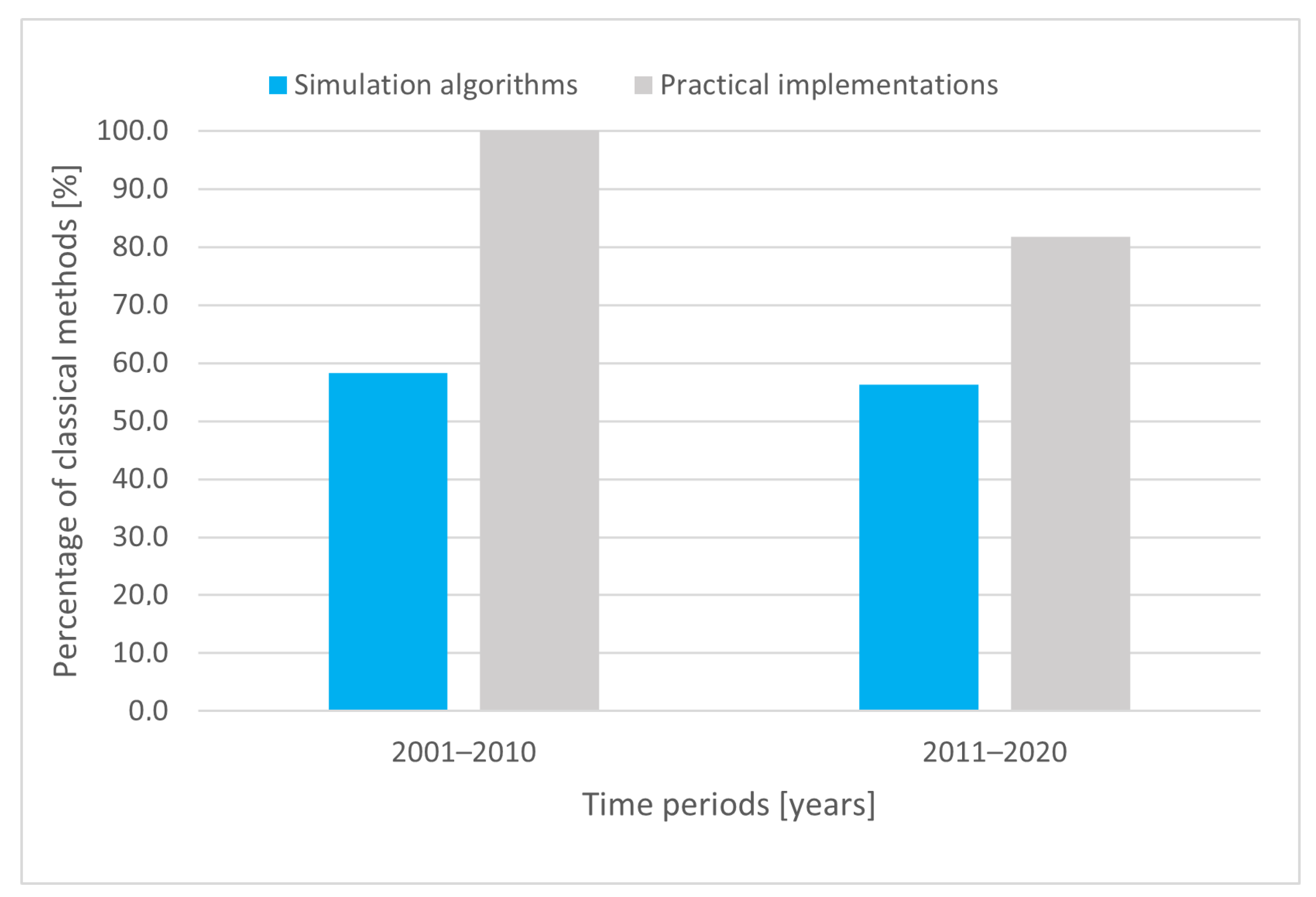
- The first group includes algorithms validated in numerical research containing new methods, modified methods, or a combination of existing methods that have been validated in a simulation environment. Some of the methods presented have been developed to be applied to real AUVs. This group also includes algorithms whose effectiveness has been verified in hardware-in-loop simulations.
- The second group includes algorithms in real applications where AUV control methods are presented, the effectiveness of which has been tested in a real environment in the presence of both real and virtual obstacles.
3.1. Until 2010
3.2. 2011–2016
3.3. 2016–2020
3.4. 2021–Now
4. Discussion
4.1. Summary
4.2. Future Works
4.3. Bottlenecks of Future Development
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGVs | Autonomous Ground Vehicles |
| AI | Artificial Inteligence |
| ANN | Artificial Neural Network |
| APF | Artificial Potential Field |
| ASV | Autonomous Surface Vehicle |
| AUVs | Autonomous Underwater Vehicles |
| BAUV | Biomimetic AUV |
| FL | Fuzzy Logic |
| FLS | Forward Looking Sonar |
| GA | Genetic Algorithm |
| I-AUV | Inspection AUV |
| PSO | Particle Swarm Optimization |
| RL | Reinfircement Learning |
| ROV | Remotely Operated Vehicles |
| RRT | Rapidly-exploring Random Tree |
| SUR | Spherical Underwater Robot |
| UAS | Unmanned Aerial Systems |
| UAV | Unmanned Aerial Vehicle |
| USV | Unmanned Surface Vehicle |
| UUV | Unmanned Underwater Vehicle |
| UxVs | Unmanned Underwater, Ground and Air Vehicles |
| VFF | Virtual Force Field |
| VFH | Vector Field Histogram |
References
- Karabchevsky, S.; Kahana, D.; Guterman, H. Acoustic real-time, low-power FPGA based obstacle detection for AUVs. In Proceedings of the 2010 IEEE 26th Convention of Electrical and Electronics Engineers in Israel, Eilat, Israel, 17–20 November 2010; pp. 655–659. [Google Scholar]
- Sayyaadi, H.; Ura, T.; Fujii, T. Collision avoidance controller for AUV systems using stochastic real value reinforcement learning method. In Proceedings of the SICE 2000 IEEE 39th SICE Annual Conference, Iizuka, Japan, 28 July 2000; pp. 165–170. [Google Scholar]
- Tang, S.H.; Khaksar, W.; Ismail, N.; Ariffin, M. A review on robot motion planning approaches. Pertanika J. Sci. Technol. 2012, 20, 15–29. [Google Scholar]
- Atyabi, A.; Powers, D. Review of classical and heuristic-based navigation and path planning approaches. Int. J. Adv. Comput. Technol. (IJACT) 2013, 5, 14. [Google Scholar]
- Kamil, F.; Tang, S.; Khaksar, W.; Zulkifli, N.; Ahmad, S. A review on motion planning and obstacle avoidance approaches in dynamic environments. Adv. Robot. Autom. 2015, 4, 134–142. [Google Scholar]
- Yang, L.; Qi, J.; Song, D.; Xiao, J.; Han, J.; Xia, Y. Survey of robot 3D path planning algorithms. J. Control Sci. Eng. 2016, 2016, 7426913. [Google Scholar] [CrossRef] [Green Version]
- Ferguson, D.; Likhachev, M.; Stentz, A. A guide to heuristic-based path planning. In Proceedings of the International Workshop on Planning under Uncertainty for Autonomous Systems, International Conference on Automated Planning and Scheduling (ICAPS), Monterey, CA, USA, 5–10 June 2005; pp. 9–18. [Google Scholar]
- Sánchez López, A.; Zapata, R.; Osorio Lama, M.A. Sampling-based motion planning: A survey. Comput. Sist. 2008, 12, 5–24. [Google Scholar]
- Saha, M. Motion Planning with Probabilistic Roadmaps; ProQuest: Cambridge, UK, 2006. [Google Scholar]
- Biswal, P.; Mohanty, P.K. Development of quadruped walking robots: A review. Ain Shams Eng. J. 2021, 12, 2017–2031. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1135–1145. [Google Scholar] [CrossRef]
- Sharma, O.; Sahoo, N.C.; Puhan, N.B. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey. Eng. Appl. Artif. Intell. 2021, 101, 104211. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Bayat, B.; Crasta, N.; Crespi, A.; Pascoal, A.M.; Ijspeert, A. Environmental monitoring using autonomous vehicles: A survey of recent searching techniques. Curr. Opin. Biotechnol. 2017, 45, 76–84. [Google Scholar] [CrossRef] [Green Version]
- Patle, B.; Pandey, A.; Parhi, D.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Beaver, L.E.; Malikopoulos, A.A. An overview on optimal flocking. Annu. Rev. Control 2021, 51, 88–99. [Google Scholar] [CrossRef]
- Kamel, M.A.; Yu, X.; Zhang, Y. Formation control and coordination of multiple unmanned ground vehicles in normal and faulty situations: A review. Annu. Rev. Control 2020, 49, 128–144. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A. Trajectory planning for multi-robot systems: Methods and applications. Expert Syst. Appl. 2021, 173, 114660. [Google Scholar] [CrossRef]
- Ragel, R.; Maza, I.; Caballero, F.; Ollero, A. Comparison of motion planning techniques for a multi-rotor UAS equipped with a multi-joint manipulator arm. In Proceedings of the 2015 IEEE Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancún, México, 23–25 November 2015; pp. 133–141. [Google Scholar]
- Fraga-Lamas, P.; Ramos, L.; Mondéjar-Guerra, V.; Fernández-Caramés, T.M. A review on IoT deep learning UAV systems for autonomous obstacle detection and collision avoidance. Remote Sens. 2019, 11, 2144. [Google Scholar] [CrossRef] [Green Version]
- Goerzen, C.; Kong, Z.; Mettler, B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance. J. Intell. Robot. Syst. 2010, 57, 65–100. [Google Scholar] [CrossRef]
- Naus, K.; Szymak, P.; Piskur, P.; Niedziela, M.; Nowak, A. Methodology for the Correction of the Spatial Orientation Angles of the Unmanned Aerial Vehicle Using Real Time GNSS, a Shoreline Image and an Electronic Navigational Chart. Energies 2021, 14, 2810. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Islam, A.; Khan, M.A.; Mahmood, A.; Rokia, L.S.; Mazinani, A.; Amjad, H. A Review on Research Challenges, Limitations and Practical Solutions for Underwater Wireless Power Transfer. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 554–562. [Google Scholar] [CrossRef]
- Al-Kaff, A.; Martin, D.; Garcia, F.; de la Escalera, A.; Armingol, J.M. Survey of computer vision algorithms and applications for unmanned aerial vehicles. Expert Syst. Appl. 2018, 92, 447–463. [Google Scholar] [CrossRef]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision avoidance of multi unmanned aerial vehicles: A review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A. Challenges and future trends in marine robotics. Annu. Rev. Control 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Neira, J.; Sequeiros, C.; Huamani, R.; Machaca, E.; Fonseca, P.; Nina, W. Review on unmanned underwater robotics, structure designs, materials, sensors, actuators, and navigation control. J. Robot. 2021, 2021, 5542920. [Google Scholar] [CrossRef]
- Orlowski, M. Directions of development of the autonomous unmanned underwater vehicles. A review. Parameters 2021, 2, 24. [Google Scholar] [CrossRef]
- Yildiz, Ö.; Gökalp, R.B.; Yilmaz, A.E. A review on motion control of the underwater vehicles. In Proceedings of the 2009 IEEE International Conference on Electrical and Electronics Engineering-ELECO 2009, Bursa, Turkey, 5–8 November 2009; pp. II-337–II-341. [Google Scholar]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path planning and obstacle avoidance for AUV: A review. Ocean Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Eichhorn, M. An obstacle avoidance system for an autonomous underwater vehicle. In Proceedings of the 2004 IEEE International Symposium on Underwater Technology (IEEE Cat. No. 04EX869), Taipei, Taiwan, 20–23 April 2004; pp. 75–82. [Google Scholar]
- Casalino, G.; Turetta, A.; Simetti, E. A three-layered architecture for real time path planning and obstacle avoidance for surveillance USVs operating in harbour fields. In Proceedings of the Oceans 2009 IEEE-Europe, Bremen, Germany, 11–14 May 2009; pp. 1–8. [Google Scholar]
- Li, J.H.; Lee, M.J.; Park, S.H.; Kim, J.G. Real time path planning for a class of torpedo-type AUVs in unknown environment. In Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Southampton, UK, 24–27 September 2012; pp. 1–6. [Google Scholar]
- Li, M.; Zhang, H. AUV 3D path planning based on A* algorithm. In Proceedings of the 2020 IEEE Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 11–16. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Autonomous Robot Vehicles; Springer: New York, NY, USA, 1986; pp. 396–404. [Google Scholar]
- Koren, Y.; Borenstein, J. Potential field methods and their inherent limitations for mobile robot navigation. In Proceedings of the ICRA, Sacramento, CA, USA, 9–11 April 1991; Volume 2, pp. 1398–1404. [Google Scholar]
- Teo, K.; Ong, K.W.; Lai, H.C. Obstacle detection, avoidance and anti collision for MEREDITH AUV. In Proceedings of the OCEANS IEEE 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–10. [Google Scholar]
- Qing, L.; Li-jun, W.; Bo, C.; Zhou, Z.; Yi-xin, Y. An improved artificial potential field method with parameters optimization based on genetic algorithms. J. Univ. Sci. Technol. 2012, 34, 202–206. [Google Scholar]
- Barraquand, J.; Latombe, J.C. Robot motion planning: A distributed representation approach. Int. J. Robot. Res. 1991, 10, 628–649. [Google Scholar] [CrossRef]
- Solari, F.J.; Rozenfeld, A.F.; Villar, S.A.; Acosta, G.G. Artificial potential fields for the obstacles avoidance system of an AUV using a mechanical scanning sonar. In Proceedings of the 2016 3rd IEEE/OES South American International Symposium on Oceanic Engineering (SAISOE), Buenos Aires, Arhentina, 14–17 June 2016; pp. 1–6. [Google Scholar]
- Youakim, D.; Ridao, P. Motion planning survey for autonomous mobile manipulators underwater manipulator case study. Robot. Auton. Syst. 2018, 107, 20–44. [Google Scholar] [CrossRef]
- Leonard, N.E.; Fiorelli, E. Virtual leaders, artificial potentials and coordinated control of groups. In Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No. 01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 3, pp. 2968–2973. [Google Scholar]
- Gazi, V. Swarm aggregations using artificial potentials and sliding-mode control. IEEE Trans. Robot. 2005, 21, 1208–1214. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef] [Green Version]
- Meng, Z.; Lin, Z.; Ren, W. Leader–follower swarm tracking for networked Lagrange systems. Syst. Control Lett. 2012, 61, 117–126. [Google Scholar] [CrossRef]
- Hou, S.P.; Cheah, C.C. Can a simple control scheme work for a formation control of multiple autonomous underwater vehicles? IEEE Trans. Control Syst. Technol. 2010, 19, 1090–1101. [Google Scholar] [CrossRef]
- Sorbi, L.; De Capua, G.P.; Toni, L.; Fontaine, J.G. Target detection and recognition: A mission planner for Autonomous Underwater Vehicles. In Proceedings of the IEEE OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–5. [Google Scholar]
- Horner, D.; Healey, A.; Kragelund, S. AUV experiments in obstacle avoidance. In Proceedings of the IEEE OCEANS 2005 MTS/IEEE, Washington, DC, USA, 17–23 September 2005; pp. 1464–1470. [Google Scholar]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning. Available online: https://www.cs.csustan.edu/~xliang/Courses/CS4710-21S/Papers/06 (accessed on 1 July 2022).
- Tan, C.S.; Sutton, R.; Chudley, J. An integrated collision avoidance system for autonomous underwater vehicles. Int. J. Control 2007, 80, 1027–1049. [Google Scholar] [CrossRef]
- Hernández, J.D.; Vidal, E.; Vallicrosa, G.; Galceran, E.; Carreras, M. Online path planning for autonomous underwater vehicles in unknown environments. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1152–1157. [Google Scholar]
- Cui, R.; Li, Y.; Yan, W. Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 993–1004. [Google Scholar] [CrossRef]
- Xanthidis, M.; Karapetyan, N.; Damron, H.; Rahman, S.; Johnson, J.; O’Connell, A.; O’Kane, J.M.; Rekleitis, I. Navigation in the presence of obstacles for an agile autonomous underwater vehicle. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 892–899. [Google Scholar]
- Tan, C.S. A Collision Avoidance System for Autonomous Underwater Vehicles. Available online: https://pearl.plymouth.ac.uk/handle/10026.1/2258 (accessed on 1 July 2022).
- Piskur, P.; Szymak, P.; Jaskólski, K.; Flis, L.; Gąsiorowski, M. Hydroacoustic system in a biomimetic underwater vehicle to avoid collision with vessels with low-speed propellers in a controlled environment. Sensors 2020, 20, 968. [Google Scholar] [CrossRef] [Green Version]
- Piskur, P.; Gasiorowski, M. Digital Signal Processing for Hydroacoustic System in Biomimetic Underwater Vehicle. NAŠE MORE Znan. časopis Za More I Pomor. 2020, 67, 14–18. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.S.; Sutton, R.; Chudley, J. An incremental stochastic motion planning technique for autonomous underwater vehicles. IFAC Proc. 2004, 37, 483–488. [Google Scholar] [CrossRef]
- Zhao, S.; Lu, T.F.; Anvar, A. Multiple obstacles detection using fuzzy interface system for auv navigation in natural water. In Proceedings of the 2010 IEEE 5th Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010; pp. 50–55. [Google Scholar]
- Piskur, P.; Szymak, P.; Flis, L.; Sznajder, J. Analysis of a Fin Drag Force in a Biomimetic Underwater Vehicle. NAŠE MORE Znan. časopis Za More I Pomor. 2020, 67, 192–198. [Google Scholar] [CrossRef]
- Piskur, P.; Szymak, P.; Przybylski, M.; Naus, K.; Jaskólski, K.; Żokowski, M. Innovative energy-saving propulsion system for low-speed biomimetic underwater vehicles. Energies 2021, 14, 8418. [Google Scholar] [CrossRef]
- Szymak, P.; Piskur, P.; Naus, K. The Effectiveness of Using a Pretrained Deep Learning Neural Networks for Object Classification in Underwater Video. Remote Sens. 2020, 12, 3020. [Google Scholar] [CrossRef]
- Meng, F.; Liu, A.; Jing, S.; Zu, Y. FSM trajectory tracking controllers of OB-AUV in the horizontal plane. In Proceedings of the 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR), Tokoname, Japan, 4–6 March 2021; pp. 204–208. [Google Scholar]
- DeMuth, G.; Springsteen, S. Obstacle avoidance using neural networks. In Proceedings of the IEEE Symposium on Autonomous Underwater Vehicle Technology, Washington, DC, USA, 5–6 June 1990; pp. 213–215. [Google Scholar]
- Guerrero-González, A.; García-Córdova, F.; Gilabert, J. A biologically inspired neural network for navigation with obstacle avoidance in autonomous underwater and surface vehicles. In Proceedings of the OCEANS 2011 IEEE, Santander, Spain, 6–9 June 2011; pp. 1–8. [Google Scholar]
- Ding, G.; Zhu, D.; Sun, B. Formation control and obstacle avoidance of multi-AUV for 3-D underwater environment. In Proceedings of the 33rd IEEE Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 8347–8352. [Google Scholar]
- Gaya, J.O.; Gonçalves, L.T.; Duarte, A.C.; Zanchetta, B.; Drews, P.; Botelho, S.S. Vision-based obstacle avoidance using deep learning. In Proceedings of the 2016 XIII IEEE Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Recife, Brazil, 8–12 October 2016; pp. 7–12. [Google Scholar]
- Jurczyk, K.; Piskur, P.; Szymak, P. Parameters identification of the flexible fin kinematics model using vision and Genetic Algorithms. Pol. Marit. Res. 2020, 27, 39–47. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Ocean. Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Yan, S.; Pan, F. Research on route planning of auv based on genetic algorithms. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 184–187. [Google Scholar]
- Wu, X.; Feng, Z.; Zhu, J.; Allen, R. Line of sight guidance with intelligent obstacle avoidance for autonomous underwater vehicles. In Proceedings of the OCEANS 2006 IEEE, Singapore, 16–19 May 2006; pp. 1–6. [Google Scholar]
- Chang, Z.H.; Tang, Z.D.; Cai, H.G.; Shi, X.C.; Bian, X.Q. GA path planning for AUV to avoid moving obstacles based on forward looking sonar. In Proceedings of the 2005 IEEE International Conference on Machine Learning and Cybernetics, Waikoloa, HI, USA, 10–12 October 2005; Volume 3, pp. 1498–1502. [Google Scholar]
- Yao, P.; Zhao, S. Three-dimensional path planning for AUV based on interfered fluid dynamical system under ocean current (June 2018). IEEE Access 2018, 6, 42904–42916. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L. Fuzzy algorithms. Inf. Control 1968, 12, 94–102. [Google Scholar] [CrossRef] [Green Version]
- Galarza, C.; Masmitja, I.; Prat, J.; Gomaríz, S. Design of obstacle detection and avoidance system for Guanay II AUV. In Proceedings of the 2016 IEEE 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 410–414. [Google Scholar]
- Zhu, D.; Yang, Y.; Yan, M. Path planning algorithm for AUV based on a Fuzzy-PSO in dynamic environments. In Proceedings of the 2011 IEEE Eighth International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Shanghai, China, 26–28 July 2011; Volume 1, pp. 525–530. [Google Scholar]
- Li, X.; Wang, W.; Song, J.; Liu, D. Path planning for autonomous underwater vehicle in presence of moving obstacle based on three inputs fuzzy logic. In Proceedings of the 2019 IEEE 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Nagoya, Japan, 13–15 July 2019; pp. 265–268. [Google Scholar]
- Braginsky, B.; Guterman, H. Obstacle avoidance approaches for autonomous underwater vehicle: Simulation and experimental results. IEEE J. Ocean. Eng. 2016, 41, 882–892. [Google Scholar] [CrossRef]
- Szymak, P. Zorientowany na Sterowanie Model Ruchu oraz Neuro-Ewolucyjno-Rozmyta Metoda Sterowania bezzałOgowymi Jednostkami Pływającymi; Politechnika Krakowska: Krakow, Poland, 2015. [Google Scholar]
- Huang, W.; Fang, H.; Li, L. Obstacle avoiding policy of multi-AUV formation based on virtual AUV. In Proceedings of the 2009 IEEE Sixth International Conference on Fuzzy Systems and Knowledge Discovery, Tianjin, China, 14–16 August 2009; Volume 4, pp. 131–135. [Google Scholar]
- Sutton, R.S.; Barto, A.G. Introduction to Reinforcement Learning. Introduction to Reinforcement Learning. Available online: https://login.cs.utexas.edu/sites/default/files/legacy_files/research/documents/1%20intro%20up%20to%20RL%3ATD.pdf (accessed on 1 July 2022).
- Szepesvári, C. Algorithms for reinforcement learning. Synth. Lect. Artif. Intell. Mach. Learn. 2010, 4, 1–103. [Google Scholar]
- Arai, Y.; Fujii, T.; Asama, H.; Kaetsu, H.; Endo, I. Collision avoidance in multi-robot systems based on multi-layered reinforcement learning. Robot. Auton. Syst. 1999, 29, 21–32. [Google Scholar] [CrossRef]
- Du, W.; Guo, T.; Chen, J.; Li, B.; Zhu, G.; Cao, X. Cooperative pursuit of unauthorized UAVs in urban airspace via Multi-agent reinforcement learning. Transp. Res. Part C Emerg. Technol. 2021, 128, 103122. [Google Scholar] [CrossRef]
- Chen, C.; Chen, X.Q.; Ma, F.; Zeng, X.J.; Wang, J. A knowledge-free path planning approach for smart ships based on reinforcement learning. Ocean Eng. 2019, 189, 106299. [Google Scholar] [CrossRef]
- Gore, R.; Pattanaik, K.; Bharti, S. Efficient Re-Planned Path for Autonomous Underwater Vehicle in Random Obstacle Scenario. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Bombay, India, 29–31 March 2019; pp. 1–5. [Google Scholar]
- Li, W.; Yang, X.; Yan, J.; Luo, X. An obstacle avoiding method of autonomous underwater vehicle based on the reinforcement learning. In Proceedings of the 2020 IEEE 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 4538–4543. [Google Scholar]
- Williams, G.N.; Lagace, G.E.; Woodfin, A. A collision avoidance controller for autonomous underwater vehicles. In Proceedings of the IEEE Symposium on Autonomous Underwater Vehicle Technology, Washington, DC, USA, 5–6 June 1990; pp. 206–212. [Google Scholar]
- Antonelli, G.; Chiaverini, S.; Finotello, R.; Schiavon, R. Real-time path planning and obstacle avoidance for RAIS: An autonomous underwater vehicle. IEEE J. Ocean. Eng. 2001, 26, 216–227. [Google Scholar] [CrossRef]
- Creuze, V.; Jouvencel, B. Avoidance of underwater cliffs for autonomous underwater vehicles. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 793–798. [Google Scholar]
- Healey, A.J. Obstacle avoidance while bottom following for the REMUS autonomous underwater vehicle. IFAC Proc. 2004, 37, 251–256. [Google Scholar]
- Quidu, I.; Hétet, A.; Dupas, Y.; Lefèvre, S. AUV (Redermor) obstacle detection and avoidance experimental evaluation. In Proceedings of the IEEE OCEANS 2007-Europe, Aberdeen, Scotland, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Jia, Q.; Li, G. Formation control and obstacle avoidance algorithm of multiple autonomous underwater vehicles (AUVs) based on potential function and behavior rules. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 569–573. [Google Scholar]
- Fan, S.; Feng, Z.; Lian, L. Collision free formation control for multiple autonomous underwater vehicles. In Proceedings of the OCEANS’10 IEEE Sydney, Sydney, Australia, 24–27 May 2010; pp. 1–4. [Google Scholar]
- Conte, G.; Zanoli, S. A sonar based obstacle avoidance system for AUVs. In Proceedings of the IEEE Symposium on Autonomous Underwater Vehicle Technology (AUV’94), Cambridge, MA, USA, 19–20 July 1994; pp. 85–91. [Google Scholar]
- Zapata, R.; Lepinay, P. Collision avoidance and bottom following of a torpedo-like AUV. In Proceedings of the OCEANS 96 MTS/IEEE Conference Proceedings, The Coastal Ocean-Prospects for the 21st Century, Fort Lauderdale, FL, USA, 23–26 September 1996; Volume 2, pp. 571–575. [Google Scholar]
- Petillot, Y.; Ruiz, I.T.; Lane, D.M. Underwater vehicle obstacle avoidance and path planning using a multi-beam forward looking sonar. IEEE J. Ocean. Eng. 2001, 26, 240–251. [Google Scholar] [CrossRef] [Green Version]
- Fodrea, L.R.; Healey, A.J. Obstacle avoidance control for the REMUS autonomous underwater vehicle. IFAC Proc. 2003, 36, 103–108. [Google Scholar] [CrossRef]
- Kawano, H. Real-time obstacle avoidance for underactuated autonomous underwater vehicles in unknown vortex sea flow by the mdp approach. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–13 October 2006; pp. 3024–3031. [Google Scholar]
- Barišić, M.; Vukić, Z.; Mišković, N. A kinematic virtual potentials trajectory planner for AUV-s. IFAC Proc. Vol. 2007, 40, 90–95. [Google Scholar] [CrossRef] [Green Version]
- Yakimenko, O.A. Real-Time Computation of Spatial and Flat Obstacle Avoidance Trajectories for UUVs. IFAC Proc. 2008, 41, 202–207. [Google Scholar] [CrossRef]
- Eichhorn, M. A new concept for an obstacle avoidance system for the AUV “SLOCUM Glider” operation under ice. In Proceedings of the IEEE Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009; pp. 1–8. [Google Scholar]
- Xu, H.; Feng, X. An AUV fuzzy obstacle avoidance method under event feedback supervision. In Proceedings of the IEEE Oceans 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–6. [Google Scholar]
- Wadhams, P.; Wilkinson, J.P.; McPhail, S. A new view of the underside of Arctic sea ice. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Pebody, M. Autonomous underwater vehicle collision avoidance for under-ice exploration. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2008, 222, 53–66. [Google Scholar] [CrossRef]
- McPhail, S.D.; Furlong, M.E.; Pebody, M.; Perrett, J.; Stevenson, P.; Webb, A.; White, D. Exploring beneath the PIG Ice Shelf with the Autosub3 AUV. In Proceedings of the IEEE Oceans 2009-Europe, Bremen, Germany, 11–14 May 2009; pp. 1–8. [Google Scholar]
- Braginsk, B.; Karabchevsk, S.; Guterma, H. Two layers obstacle avoidance algorithm for autonomous underwater vehicle. In Proceedings of the 2012 IEEE 27th Convention of Electrical and Electronics Engineers in Israel, Eilat, Israel, 14–17 November 2012; pp. 1–5. [Google Scholar]
- Karabchevsky, S.; Braginsky, B.; Guterman, H. AUV real-time acoustic vertical plane obstacle detection and avoidance. In Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles (AUV), Southampton, UK, 24–27 September 2012; pp. 1–6. [Google Scholar]
- Cheng, C.; Zhu, D.; Sun, B.; Chu, Z.; Nie, J.; Zhang, S. Path planning for autonomous underwater vehicle based on artificial potential field and velocity synthesis. In Proceedings of the 2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada, 3–6 May 2015; pp. 717–721. [Google Scholar]
- Subramanian, S.; George, T.; Thondiyath, A. Hardware-in-the-Loop verification for 3D obstacle avoidance algorithm of an underactuated flat-fish type AUV. In Proceedings of the 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 545–550. [Google Scholar]
- Yang, Y.; Zhu, D. Research on dynamic path planning of auv based on forward looking sonar and fuzzy control. In Proceedings of the 2011 IEEE Chinese Control and Decision Conference (CCDC), Mianyang, China, 23–25 May 2011; pp. 2425–2430. [Google Scholar]
- Sun, Y.; Wu, H.; Zhang, Y.; Li, C. Obstacle avoidance of autonomous underwater vehicle based on improved balance of motion. In Proceedings of the 2013 IEEE 2nd International Conference on Measurement, Information and Control, Harbin, China, 16–18 August 2013; Volume 2, pp. 788–792. [Google Scholar]
- Wang, H.; Wang, L.; Li, J.; Pan, L. A vector polar histogram method based obstacle avoidance planning for AUV. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–5. [Google Scholar]
- Millar, G. An obstacle avoidance system for autonomous underwater vehicles: A reflexive vector field approach utilizing obstacle localization. In Proceedings of the 2014 IEEE/OES Autonomous Underwater Vehicles (AUV), Oxford, MS, USA, 6–9 October 2014; pp. 1–4. [Google Scholar]
- Xu, H.; Gao, L.; Liu, J.; Wang, Y.; Zhao, H. Experiments with obstacle and terrain avoidance of autonomous underwater vehicle. In Proceedings of the Oceans 2015-MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–4. [Google Scholar]
- Yan, Z.; Li, J.; Jiang, A.; Wang, L. An Obstacle Avoidance Algorithm for AUV Based on Obstacle’s Detected Outline. In Proceedings of the 2018 IEEE 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5257–5262. [Google Scholar]
- Chu, Z.; Zhu, D. Obstacle Avoidance Trajectory Planning and Trajectory Tracking Control for Autonomous Underwater Vehicles. In Proceedings of the 2018 IEEE 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018; pp. 450–454. [Google Scholar]
- Haoran, L.; Hongjun, D.; Yakun, Z. Avoidance for AUV with mobile obstacles based on current interference. In Proceedings of the 2019 3rd International Symposium on Autonomous Systems (ISAS), Shanghai, China, 29–31 May 2019; pp. 137–142. [Google Scholar] [CrossRef]
- Sahu, B.K.; Subudhi, B. Flocking control of multiple AUVs based on fuzzy potential functions. IEEE Trans. Fuzzy Syst. 2017, 26, 2539–2551. [Google Scholar] [CrossRef]
- Li, X.; Zhu, D. An adaptive SOM neural network method for distributed formation control of a group of AUVs. IEEE Trans. Ind. Electron. 2018, 65, 8260–8270. [Google Scholar] [CrossRef]
- Wu, J.; Song, C.; Fan, C.; Hawbani, A.; Zhao, L.; Sun, X. DENPSO: A distance evolution nonlinear PSO algorithm for energy-efficient path planning in 3D UASNs. IEEE Access 2019, 7, 105514–105530. [Google Scholar] [CrossRef]
- Hou, X.; Pan, X.; Bi, M. Research on Non-collision Coordination Control Technology for Formation Autonomous Underwater Vehicle. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 1178–1183. [Google Scholar]
- Zhu, Y. A multi-AUV searching algorithm based on neuron network with obstacle. In Proceedings of the 2019 IEEE 3rd International Symposium on Autonomous Systems (ISAS), Shanghai, China, 29–31 May 2019; pp. 131–136. [Google Scholar]
- Ma, X.; Yanli, C.; Bai, G.; Liu, J. Multi-AUV collaborative operation based on time-varying navigation map and dynamic grid model. IEEE Access 2020, 8, 159424–159439. [Google Scholar] [CrossRef]
- Grefstad, Ø.; Schjølberg, I. Navigation and collision avoidance of underwater vehicles using sonar data. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Praczyk, T.; Szymak, P.; Naus, K.; Pietrukaniec, L.; Hożyń, S. Report on research with biomimetic autonomous underwater vehicle—Navigation and autonomous operation. Zesz. Nauk. Akad. Mar. Wojennej 2018, 59. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Lu, W.; Liu, D. A unified closed-loop motion planning approach for an I-AUV in cluttered environment with localization uncertainty. In Proceedings of the 2019 IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 4646–4652. [Google Scholar]
- Felski, A.; Jaskolski, K.; Zwolak, K.; Piskur, P. Analysis of Satellite Compass Error’s Spectrum. Sensors 2020, 20, 4067. [Google Scholar] [CrossRef]
- Ferreira, F.; Petroccia, R.; Alves, J. Underwater/surface collision avoidance using underwater acoustic communications-a preliminary analysis. In Proceedings of the IEEE Oceans 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–10. [Google Scholar]
- Eriksen, B.O.H.; Breivik, M.; Pettersen, K.Y.; Wiig, M.S. A modified dynamic window algorithm for horizontal collision avoidance for AUVs. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016; pp. 499–506. [Google Scholar]
- Simoni, R.; Rodríguez, P.R.; Cieślak, P.; Youakim, D. A novel approach to obstacle avoidance for an I-AUV. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Kappagantula, S.; Ramadass, G.; Adlinge, S.D. Design of a Biomimetic Robot Fish for Realization of Coefficient of Drag with Control Architecture and Fuzzy Logic Algorithm for Autonomous Obstacle Avoidance. In Proceedings of the 2018 IEEE 3rd International Conference for Convergence in Technology (I2CT), Pune, India, 6–8 April 2018; pp. 1–9. [Google Scholar]
- Yan, Z.; Li, J.; Wu, Y.; Yang, Z. A novel path planning for AUV based on objects’ motion parameters predication. IEEE Access 2018, 6, 69304–69320. [Google Scholar] [CrossRef]
- Vibhute, S. Adaptive dynamic programming based motion control of autonomous underwater vehicles. In Proceedings of the 2018 IEEE 5th International Conference on Control, Decision and Information Technologies (CoDIT), Thessaloniki, Greece, 10–13 April 2018; pp. 966–971. [Google Scholar]
- Liu, R.D.; Chen, Z.G.; Wang, Z.J.; Zhan, Z.H. Intelligent path planning for AUVs in dynamic environments: An EDA-based learning fixed height histogram approach. IEEE Access 2019, 7, 185433–185446. [Google Scholar] [CrossRef]
- Fanelli, F.; Fenucci, D.; Marlow, R.; Pebody, M.; Phillips, A.B. Development of a multi-platform obstacle avoidance system for autonomous underwater vehicles. In Proceedings of the 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), St Johns, NL, Canada, 30 September–2 October 2020; pp. 1–6. [Google Scholar]
- Liu, Y.; Liu, L.; Yu, X.; Wang, C. Optimal Path Planning Algorithm of AUV State Space Sampling Based on Improved Cost Function. In Proceedings of the 2020 IEEE 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3747–3752. [Google Scholar]
- Praczyk, T. Neural collision avoidance system for biomimetic autonomous underwater vehicle. Soft Comput. 2020, 24, 1315–1333. [Google Scholar] [CrossRef] [Green Version]
- McMahon, J.; Plaku, E. Mission and motion planning for autonomous underwater vehicles operating in spatially and temporally complex environments. IEEE J. Ocean. Eng. 2016, 41, 893–912. [Google Scholar] [CrossRef]
- Okamoto, A.; Sasano, M.; Seta, T.; Inaba, S.; Sato, K.; Tamura, K.; Nishida, Y.; Ura, T. Obstacle avoidance method appropriate for the steep terrain of the deep seafloor. In Proceedings of the 2016 IEEE Techno-Ocean (Techno-Ocean), Kobe, Japan, 6–8 October 2016; pp. 195–198. [Google Scholar]
- McEwen, R.S.; Rock, S.P.; Hobson, B. Iceberg wall following and obstacle avoidance by an AUV. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–8. [Google Scholar]
- Okamoto, A.; Sasano, M.; Seta, T.; Hirao, S.C.; Inaba, S. Deployment of the auv hobalin to an active hydrothermal vent field with an improved obstacle avoidance system. In Proceedings of the 2018 IEEE OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–6. [Google Scholar]
- Hernández, J.D.; Vidal, E.; Moll, M.; Palomeras, N.; Carreras, M.; Kavraki, L.E. Online motion planning for unexplored underwater environments using autonomous underwater vehicles. J. Field Robot. 2019, 36, 370–396. [Google Scholar] [CrossRef]
- Zheng, J.; Song, L.; Liu, L.; Yu, W.; Wang, Y.; Chen, C. Fixed-time sliding mode tracking control for autonomous underwater vehicles. Appl. Ocean Res. 2021, 117, 102928. [Google Scholar] [CrossRef]
- Chen, Y.L.; Hu, X.Y.; Ma, X.W.; Bai, G.Q. Adaptive location correction and path re-planning based on error estimation method in underwater sensor networks. Ocean Eng. 2022, 252, 111257. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K.; Mehrmohammadi, P. Reinforcement learning-based saturated adaptive robust neural-network control of underactuated autonomous underwater vehicles. Expert Syst. Appl. 2022, 197, 116714. [Google Scholar] [CrossRef]
- Heshmati-Alamdari, S.; Nikou, A.; Dimarogonas, D.V. Robust trajectory tracking control for underactuated autonomous underwater vehicles in uncertain environments. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1288–1301. [Google Scholar] [CrossRef]
- Chen, B.; Ma, H.; Kang, H.; Liang, X. Multi-agent Distributed Formation Control Based on Improved Artificial Potential Field and Neural Network for Connectivity Preservation. In Proceedings of the 2021 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 15–17 October 2021; pp. 455–460. [Google Scholar]
- Zhu, D.; Zhou, B.; Yang, S.X. A Novel Algorithm of Multi-AUVs Task Assignment and Path Planning Based on Biologically Inspired Neural Network Map. IEEE Trans. Intell. Veh. 2021, 6, 333–342. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, M.; Zhang, S.; Zheng, R.; Dong, S. Multi-AUV Adaptive Path Planning and Cooperative Sampling for Ocean Scalar Field Estimation. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Sun, Y.; Luo, X.; Ran, X.; Zhang, G. A 2D Optimal Path Planning Algorithm for Autonomous Underwater Vehicle Driving in Unknown Underwater Canyons. J. Mar. Sci. Eng. 2021, 9, 252. [Google Scholar] [CrossRef]
- Scharff Willners, J.; Gonzalez-Adell, D.; Hernández, J.D.; Pairet, È.; Petillot, Y. Online 3-dimensional path planning with kinematic constraints in unknown environments using hybrid A* with tree pruning. Sensors 2021, 21, 1152. [Google Scholar] [CrossRef]
- Yuan, J.; Wang, H.; Zhang, H.; Lin, C.; Yu, D.; Li, C. AUV obstacle avoidance planning based on deep reinforcement learning. J. Mar. Sci. Eng. 2021, 9, 1166. [Google Scholar] [CrossRef]
- Qiu, X.; Feng, C.; Shen, Y. Obstacle avoidance planning combining reinforcement learning and RRT* applied to underwater operations. In Proceedings of the OCEANS 2021: San Diego–Porto IEEE, San Diego, France, 20–23 September 2021; pp. 1–6. [Google Scholar]
- Lim, H.S.; King, P.; Chin, C.K.; Chai, S.; Bose, N. Real-time implementation of an online path replanner for an AUV operating in a dynamic and unexplored environment. Appl. Ocean Res. 2022, 118, 103006. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, M.; Qiao, L. Adaptive barrier Lyapunov function-based obstacle avoidance control for an autonomous underwater vehicle with multiple static and moving obstacles. Ocean Eng. 2022, 243, 110303. [Google Scholar] [CrossRef]
- Qin, R.; Zhao, X.; Zhu, W.; Yang, Q.; He, B.; Li, G.; Yan, T. Multiple receptive field network (MRF-Net) for autonomous underwater vehicle fishing net detection using forward-looking sonar images. Sensors 2021, 21, 1933. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhang, S.; Wang, Y.; Liu, Y.; Yang, Y.; Zhou, T.; Bian, H. Subsea pipeline leak inspection by autonomous underwater vehicle. Appl. Ocean Res. 2021, 107, 102321. [Google Scholar] [CrossRef]
- An, R.; Guo, S.; Zheng, L.; Hirata, H.; Gu, S. Uncertain moving obstacles avoiding method in 3D arbitrary path planning for a spherical underwater robot. Robot. Auton. Syst. 2022, 151, 104011. [Google Scholar] [CrossRef]
- Ridao, P.; Carreras, M.; Ribas, D.; Sanz, P.J.; Oliver, G. Intervention AUVs: The next challenge. Annu. Rev. Control 2015, 40, 227–241. [Google Scholar] [CrossRef] [Green Version]
- Yue, C.; Guo, S.; Shi, L. Hydrodynamic analysis of the spherical underwater robot SUR-II. Int. J. Adv. Robot. Syst. 2013, 10, 247. [Google Scholar] [CrossRef]
- Li, Y.; Guo, S.; Wang, Y. Design and characteristics evaluation of a novel spherical underwater robot. Robot. Auton. Syst. 2017, 94, 61–74. [Google Scholar] [CrossRef]
- Gu, S.; Guo, S.; Zhang, L.; Yao, Y. A hybrid propulsion device for the spherical underwater robot (SUR III). In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Kagawa, Japan, 6–9 August 2017; pp. 387–392. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Review | Field of Analisys | Year | Main Focus |
|---|---|---|---|
| [7] | Robots | 2005 | This review elaborated on heuristic algorithms for robots, showing examples of their efficient and inefficient operation. |
| [9] | Robots | 2006 | This review focused on probabilistic foadmap approaches in dealing with dynamic collision, narrow passages, multi-targets, and manipulation planning for deformable linear objects. |
| [8] | Robots | 2008 | This study reviewed sampling-based motion planning algorithms for robots. |
| [3] | Robots | 2012 | This study reviewed motion planning approaches for robots from the years 1980–2010 indicating how the number of heuristic algorithms changed in individual decades compared to conventional algorithms |
| [13] | Robots | 2013 | This study reviewed coverage path planning issues for robots |
| [4] | Robots | 2015 | This study presented the basics of classical and heuristics-based methods for robots. |
| [5] | Robots | 2015 | This review analysed 80 articles from 2011–2015 on motion planning in a dynamic environment for robots and systematised individual solutions in terms of parameters such as smooth path, safety, path length, run-time, accuracy, stability, control, computation cost, efficiency. |
| [6] | Robots | 2016 | This study reviewed 3D path-planning algorithms for robots, focusing on the universality of individual algorithms implementation in aerial, ground, and underwater robots. |
| [14] | Robots | 2017 | This study reviewed searching methods for environmental monitoring |
| [15] | Robots (Single and multi-robot) | 2019 | This study discussed navigation techniques for the single and multi-robot systems in both static and dynamic environments. |
| [17] | Robots (Multi-robot) | 2020 | This study reviewed the available literature in terms of the multi-robot movement in normal and faulty situations. |
| [18] | Robots (Multi-robot) | 2021 | This study focused on methods of determining desired trajectories for multi-robots. |
| [16] | Robots (Multi-robot) | 2021 | This study analysed the techniques of movement of the robot group depending on the shape of the formation. |
| [10] | Robots | 2021 | This study summarized the achievements in the field of quadrupedal robots |
| [11] | Ground Robots (AV) | 2015 | This study presented relevant works in the overtaking and obstacle avoidance maneuvers and also makes an overview of the state-of-the-art implementation of motion planning techniques for automated driving. |
| [12] | Ground Robots (AV) | 2021 | This study reviewed existing approaches on motion and behavior planning for AVs in terms of their feasibility, capability in handling dynamic constraints and obstacles, and optimality of motion for comfort. |
| [21] | Aerial Robots (UAVs) | 2010 | This study presented existing motion-planning algorithms and recent developments in the robotics and aerospace guidance and control fields. The review also analysed perspectives and practical examples from UAV guidance approaches. |
| [19] | Aerial Robots (UAS) | 2015 | This study presented a comparison between different motion-planning algorithms for a multi-rotor UAS with a multi-joint robotic arm. |
| [24] | Aerial Robots (UAVs) | 2018 | This study discussed vision-based algorithms for UAVs. |
| [25] | Aerial Robots (multi-UAV) | 2019 | This study presented a state-of-the-art overview of various approaches for multi-UAV collision avoidance. |
| [20] | Aerial Robots (multi-UAV) | 2019 | This study presented the most relevant Deep Learning techniques for autonomous collision avoidance as well as their application to UAV systems. |
| [23] | Aerial Robots (UAV) | 2020 | This study presented an extensive review of UAVs including physical characteristics, classification, standardization, battery charging, security challenges, and solutions. The research also discussed the perspective of using UAVs in 5G networks, Internet of Things Networks, and different applications. |
| [22] | Aerial Robots (UAV) | 2021 | This study presented the methodology for spatial orientation angle correction for UAV. |
| [29] | Marine robots(UUV) | 2009 | This study reviewed the development of control methods and the problems encountered during the research connected with motion control of UUVs. |
| [26] | Marine robots | 2018 | This study analysed the technological development and limitations that are encountered in marine robotics. |
| [27] | Marine robots (UUV) | 2021 | This study defined the trends in construction, instrumentation, and systems for UUVs. |
| [28] | Marine robots (single and multi-AUV) | 2021 | This study described the main systems for both a single AUV and multi-AUV as well as the possible directions of AUV’s further development. |
| [30] | Marine robots (AUV) | 2021 | This study provides detailed literature that analyses path planning related solutions for AUVs. |
| This review | Marine robots (AUV) | 2022 | This study provides a structured review of simulations and practical implementations of collision avoidance and path planning algorithm in AUV together with a comparison of the difficulties encountered during simulations and their practical implementation. |
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [89] | Modified Potential Field method |
|
| [64] | Neural Network |
|
| [96] | Increase or decrease velocity, heading control |
|
| [97] | Deformable Virtual Zone |
|
| [2] | Reinforcement Learning based on the stochastic real value function |
|
| [90] | Virtual Force Field (VFF) |
|
| [98] | Nonlinear programming technique |
|
| [91] | Changing pitch angle |
|
| [99] | Fuzzy Logic |
|
| [32] | Two-layer control Path planning by Graph method with A* method Reactive control based on Deformable Safety Zone |
|
| [72] | Genetic Algorithm |
|
| [100] | Markov decision process |
|
| [71] | Genetic Algorithm tuned Fuzzy Logic planner |
|
| [101] | Virtual Potential Method |
|
| [102] | Direct-method-based procedure |
|
| [103] | Graph algorithm based on time-varying ocean flow |
|
| [104] | Fuzzy Logic |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [49] | Artificial Potential Field |
|
| [38] | Vector Field Histogram + |
|
| [106,107] | Reactive behaviours |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [112] | Fuzzy interface controller with A/B (accelerate/break) module |
|
| [77] | Fuzzy-PSO controller with A/B (accelerate/break) module |
|
| [108] | Potential Field and Edge Detection methods |
|
| [109] | Potential Field and Edge detection methods |
|
| [34] | Graph method with A* path find algorithm |
|
| [111] | Multi-Point Potential Field |
|
| [113] | Modified balance points of motion |
|
| [114] | Vector Polar Histogram (VPH) |
|
| [110] | Velocity synthesis algorithm and Artificial Potential Field method |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [65] | Neural Network |
|
| [115] | Combination of the vector field, reactive algorithm and object mapping algorithm |
|
| [52] | Optimal Rapidly exploring Random Tree (RRT*) |
|
| [116] | Reactive behaviours |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [41] | Artificial Potential Field |
|
| [131] | Dynamic Window |
|
| [76] | Fuzzy reactive architecture for different forward speed |
|
| [67] | Deep Learning |
|
| [132] | Safety spheres |
|
| [117] | Improved APF |
|
| [118] | Radial Basis Function (RBF) Neural Networks |
|
| [133] | Fuzzy Logic |
|
| [134] | Rapid random search tree algorithm |
|
| [73] | Improved Interfered Fluid Dynamical System, Improved Genetic Algorithm for energy optimal path obtaining |
|
| [135] | Machine Learning-based algorithm |
|
| [87] | Image segmentation and Reinforcement Learning |
|
| [119] | Modified Potential Field |
|
| [78] | Three inputs Fuzzy Logic |
|
| [136] | Improved histogram-based EDA (LFHH-Learning Fixed-Height Histogram) |
|
| [70] | Improved Genetic Algorithm |
|
| [137] | Reactive behaviours |
|
| [88] | Reinforcement learning |
|
| [138] | APF based method |
|
| [35] | 3D Multi direction A* |
|
| [139] | Evolutionary Neural Network |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [79] | Two-layer algorithm Fuzzy Logic for preplanning, potential field and edge detection to reactive maneuvers |
|
| [140] | RRT based algorithm |
|
| [141] | Reactive behaviours |
|
| [142] | Reactive behaviours |
|
| [143] | Reactive behaviours |
|
| [144] | Optimal RRT* based algorithm |
|
| [54] | Sequential convex optimisation |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [152] | Improved Deep Deterministic Policy Gradient (DDPG) |
|
| [153] | HA* (Hybrid A*) |
|
| [154] | Deep Reinforcement Learning |
|
| [155] | Reinforcement Learning—RRT* |
|
| [156] | (SDEQPSO) algorithm Selective Differential Evolution Quantum-behaved Particle Swarm Optimisation |
|
| [157] | Dynamic Virtual AUV principle and Barrier Lyapunov function |
|
| Research | Algorithm | Main Characteristics |
|---|---|---|
| [158] | Reactive behaviours |
|
| [159] | Reactive behaviours (APF based) |
|
| [160] | Merged Ant Colony and PSO algorithms |
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kot, R. Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics 2022, 11, 2301. https://doi.org/10.3390/electronics11152301
Kot R. Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics. 2022; 11(15):2301. https://doi.org/10.3390/electronics11152301
Chicago/Turabian StyleKot, Rafał. 2022. "Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles" Electronics 11, no. 15: 2301. https://doi.org/10.3390/electronics11152301
APA StyleKot, R. (2022). Review of Collision Avoidance and Path Planning Algorithms Used in Autonomous Underwater Vehicles. Electronics, 11(15), 2301. https://doi.org/10.3390/electronics11152301