
Dim and Small Target Tracking Using an Improved Particle Filter Based on Adaptive Feature Fusion

Abstract
:1. Introduction
- Our method adaptively fuses three kinds of features to express the dim and small targets more accurately, making it robustly track the targets in various complex scenes.
- Our improved resampling method addresses the lack of particle diversity with a lower computational complexity, which makes a good balance between the tracking performance and computational cost.
2. Background Information
3. Principle of the Proposed Method
3.1. Feature Extraction
3.2. Feature Fusion and Model Establishment
3.3. Improved Resampling Particle Filter Algorithm
3.4. Algorithm Process
| Algorithm 1. The pseudo code of the algorithm we proposed. |
| Input: image sequences I and target position in initial frame. |
| Output: the target position Pos in subsequent frames. |
| % Initial frame. Initialization |
| Extract ; and fuse them to get ; |
| Initialize N particles and perform importance sampling. |
| % Subsequent frames. Tracking |
| for frame=2: length(I): |
| Extract at current frame; |
| Fuse to get according to Equations (19)–(21); |
| ← Equation (22); |
| ← Equation (10); |
| Pos← Equation (6); |
| % Resampling |
| if : |
| continue; |
| else: |
| Perform residual resampling; |
| Generate new particles according to Equation (24). |
| end if |
| end for |
4. Experimental Results and Analysis
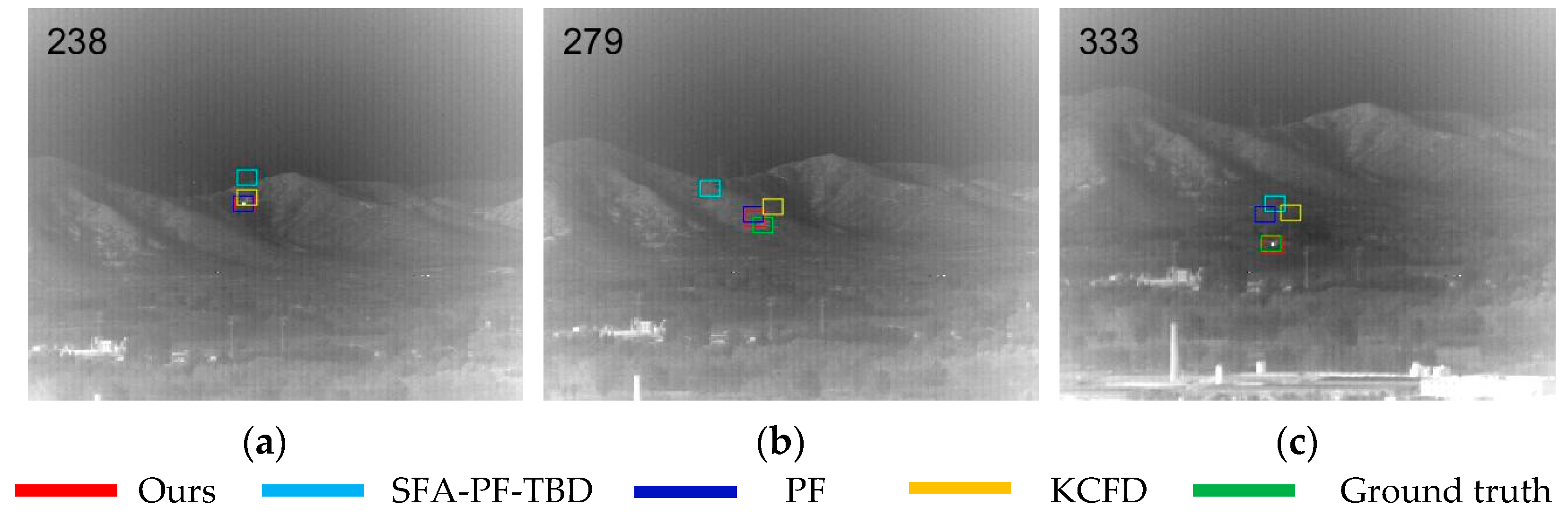
4.1. Qualitative Analysis
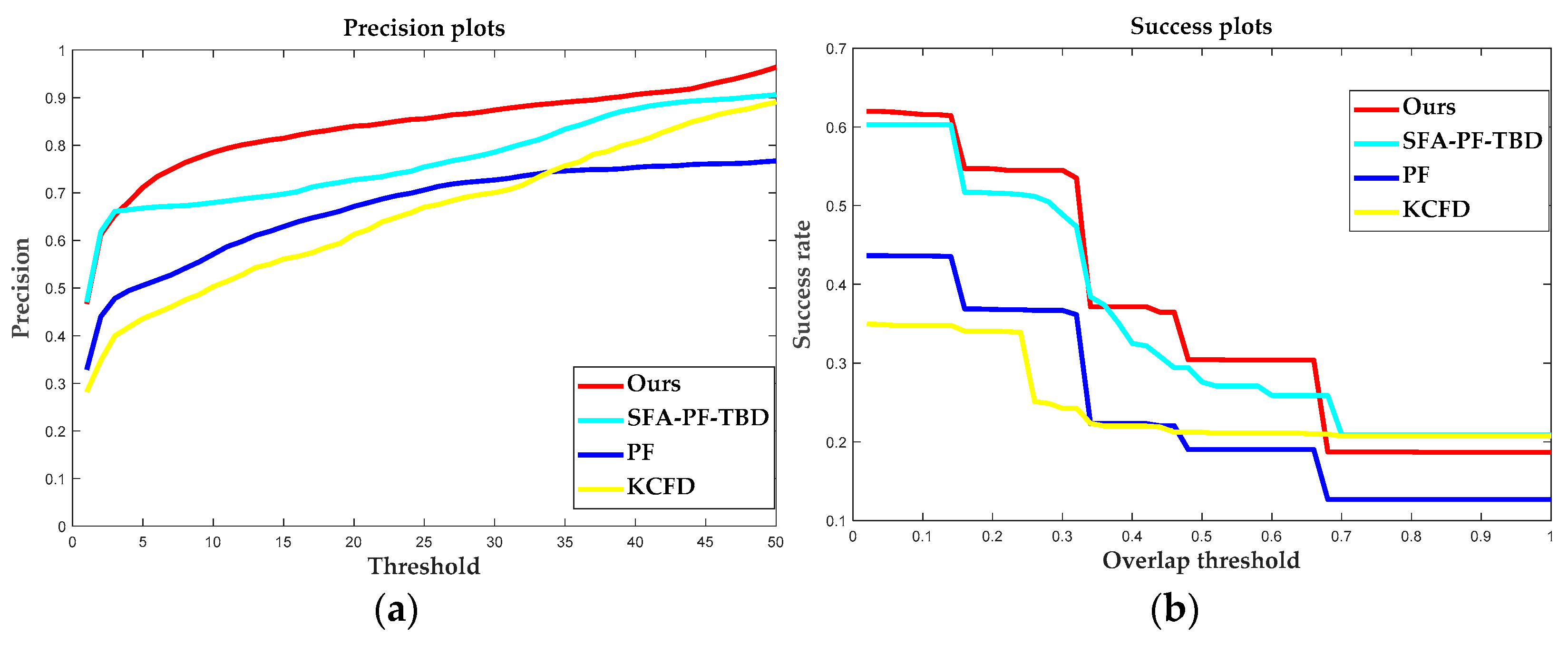
4.2. Quantitative Analysis
4.3. Merits and Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, T.; Bolic, M.; Djuric, P.M. Resampling Methods for Particle Filtering: Classification, Implementation, and Strategies. IEEE Signal Process. Mag. 2002, 32, 70–86. [Google Scholar] [CrossRef]
- Bai, Y.; Yang, D.Z.; Yu, S.; Li, J.Y.; Huang, C. Overview on Infrared Dim Target Tracking. In Proceedings of the Seventh Asia Pacific Conference on Optics Manufacture and 2021 International Forum of Young Scientists on Advanced Optical Manufacturing (APCOM and YSAOM 2021), Shanghai, China, 28–31 August 2021; SPIE: Bellingham, WA, USA, 2022; Volume 12166, pp. 1808–1815. [Google Scholar]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Attentional Local Contrast Networks for Infrared Small Target Detection. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9813–9824. [Google Scholar] [CrossRef]
- Dong, Y.; Du, B.; Zhang, L. Target Detection Based on Random Forest Metric Learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1830–1838. [Google Scholar] [CrossRef]
- Ivanov, Y.; Peleshko, D.; Makoveychuk, O.; Izonin, I.; Malets, I.; Lotoshunska, N.; Batyuk, D. Adaptive Moving Object Segmentation Algorithms in Cluttered Environments. In Proceedings of the 2015 13th International Conference the Experience of Designing and Application of CAD Systems in Microelectronics (CADSM 2015), Lviv, Ukraine, 24–27 February 2015; pp. 97–99. [Google Scholar]
- Peleshko, D.; Ivanov, Y.; Sharov, B.; Izonin, I.; Borzov, Y. Design and Implementation of Visitors Queue Density Analysis and Registration Method for Retail Videosurveillance Purposes. In Proceedings of the 2016 IEEE First International Conference on Data Stream Mining & Processing (DSMP), Lviv, Ukraine, 23–27 August 2016; pp. 159–162. [Google Scholar]
- Das, S.; Kale, A.; Vaswani, N. Particle Filter with a Mode Tracker for Visual Tracking Across Illumination Changes. IEEE Trans. Image Process. 2011, 21, 2340–2346. [Google Scholar] [CrossRef] [PubMed]
- João, F.H.; Rui, C.; Pedro, M.; Jorge, B. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ECO: Efficient Convolution Operators for Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6931–6939. [Google Scholar]
- Li, F.; Tian, C.; Zuo, W.; Zhang, L.; Yang, M.-H. Learning Spatial-Temporal Regularized Correlation Filters for Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4904–4913. [Google Scholar]
- Eysa, R.; Hamdulla, A. Issues on Infrared Dim Small Target Detection and Tracking. In Proceedings of the 2019 International Conference on Smart Grid and Electrical Automation (ICSGEA), Xiangtan, China, 10–11 August 2019; pp. 452–456. [Google Scholar]
- Qian, K.; Rong, S.H.; Cheng, K.H. Anti-Interference Small Target Tracking from Infrared Dual Waveband Imagery. Infrared Phys. Technol. 2021, 118, 103882. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, K.; Gao, L. Infrared Small Target Tracking in Complex Background Based on Trajectory Prediction. In Proceedings of the Eleventh International Conference on Graphics and Image Processing (ICGIP 2019), Hangzhou, China, 12–14 October 2019; SPIE: Bellingham, WA, USA, 2020; Volume 11373, pp. 476–484. [Google Scholar]
- Kou, Z.; Hamdulla, A. Infrared Small Target Tracking Based on Target Spatial Distribution with Improved Kernelized Correlation Filtering. Res. Sq. 2021. [Google Scholar] [CrossRef]
- Cai, J.; Huang, Y.; Li, P. Small Target Tracking in Background Using Saliency-Based Particle Filter. In Proceedings of the Proceedings 2018 Chinese Automation Congress, CAC 2018, Xi’an, China, 30 November–2 December 2018; pp. 1350–1354. [Google Scholar]
- Fan, X.; Xu, Z.; Zhang, J. Dim Small Target Tracking Based on Improved Particle Filter. Guangdian Gongcheng/Opto-Electronic Eng. 2018, 45, 170569-1–170569-10. [Google Scholar]
- Ji, E.; Gu, G.; Qian, W.; Bai, L.; Sui, X. Improved Particle Filtering Algorithm Based on the Multi-Feature Fusion for Small IR Target Tracking. In International Symposium on Photoelectronic Detection and Imaging 2011: Advances in Infrared Imaging and Applications; SPIE: Bellingham, WA, USA, 2011; pp. 437–445. [Google Scholar]
- Wang, Y.; Wang, X.; Shan, Y.; Cui, N. Quantized Genetic Resampling Particle Filtering for Vision-Based Ground Moving Target Tracking. Aerosp. Sci. Technol. 2020, 103, 105925. [Google Scholar] [CrossRef]
- Tian, M.; Chen, Z.; Wang, H.; Liu, L. An Intelligent Particle Filter for Infrared Dim Small Target Detection and Tracking. IEEE Trans. Aerosp. Electron. Syst. 2022, 9251, 1. [Google Scholar] [CrossRef]
- Comaniciu, D.; Ramesh, V.; Meer, P. Kernel-Based Object Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 564–577. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Li, Y.; Qiu, A. Comparison Research of Capability of Several Edge Detection Operators. In Proceedings of the International Conference on Industrial Technology and Management Science, Tianjin, China, 27–28 March 2015; Atlantis Press: Amsterdam, The Netherlands, 2015; pp. 795–798. [Google Scholar]
- He, C.; Zheng, Y.F.; Ahalt, S.C. Object Tracking Using the Gabor Wavelet Transform and the Golden Section Algorithm. IEEE Trans. Multimed. 2002, 4, 528–538. [Google Scholar]
- Hui, B.; Song, Z.; Fan, H.; Zhong, P.; Hu, W.; Zhang, X.; Lin, J.; Su, H.; Jin, W.; Zhang, Y.; et al. A Dataset for Infrared Image Dim-Small Aircraft Target Detection and Tracking under Ground/Air Background. Sci. Data Bank 2019, 5, 12. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Total Frames | Target Size | Sequence Characteristics |
|---|---|---|---|
| data5 | 3000 | 2 × 2 | Super long-time, weak target |
| data8 | 399 | 2 × 2 | Weak target, complex background |
| data16 | 499 | 5 × 5 | Move fast, from far to near |
| data18 | 500 | 5 × 5 | Move fast, complex background |
| data19 | 1599 | 2 × 2 | Long-time, complex background |
| data20 | 400 | 2 × 2 | Weak target, target rotation |
| Algorithm | Center Pixel Error/Pixels | Distance Accuracy (20) | Overlap Rate | Speed/fps |
|---|---|---|---|---|
| Ours | 37.4 | 77.2% | 27.0% | 106 |
| SFA-PF-TBD | 38.5 | 68.6% | 26.2% | 65 |
| PF | 42.9 | 66.2% | 15.9% | 121 |
| KCFD | 39.2 | 48.7% | 18.7% | 73 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huo, Y.; Chen, Y.; Zhang, H.; Zhang, H.; Wang, H. Dim and Small Target Tracking Using an Improved Particle Filter Based on Adaptive Feature Fusion. Electronics 2022, 11, 2457. https://doi.org/10.3390/electronics11152457
Huo Y, Chen Y, Zhang H, Zhang H, Wang H. Dim and Small Target Tracking Using an Improved Particle Filter Based on Adaptive Feature Fusion. Electronics. 2022; 11(15):2457. https://doi.org/10.3390/electronics11152457
Chicago/Turabian StyleHuo, Youhui, Yaohong Chen, Hongbo Zhang, Haifeng Zhang, and Hao Wang. 2022. "Dim and Small Target Tracking Using an Improved Particle Filter Based on Adaptive Feature Fusion" Electronics 11, no. 15: 2457. https://doi.org/10.3390/electronics11152457
APA StyleHuo, Y., Chen, Y., Zhang, H., Zhang, H., & Wang, H. (2022). Dim and Small Target Tracking Using an Improved Particle Filter Based on Adaptive Feature Fusion. Electronics, 11(15), 2457. https://doi.org/10.3390/electronics11152457