
Sampled-Data Linear Parameter Variable Approach for Voltage Regulation of DC–DC Buck Converter



Abstract
:1. Introduction
- (i)
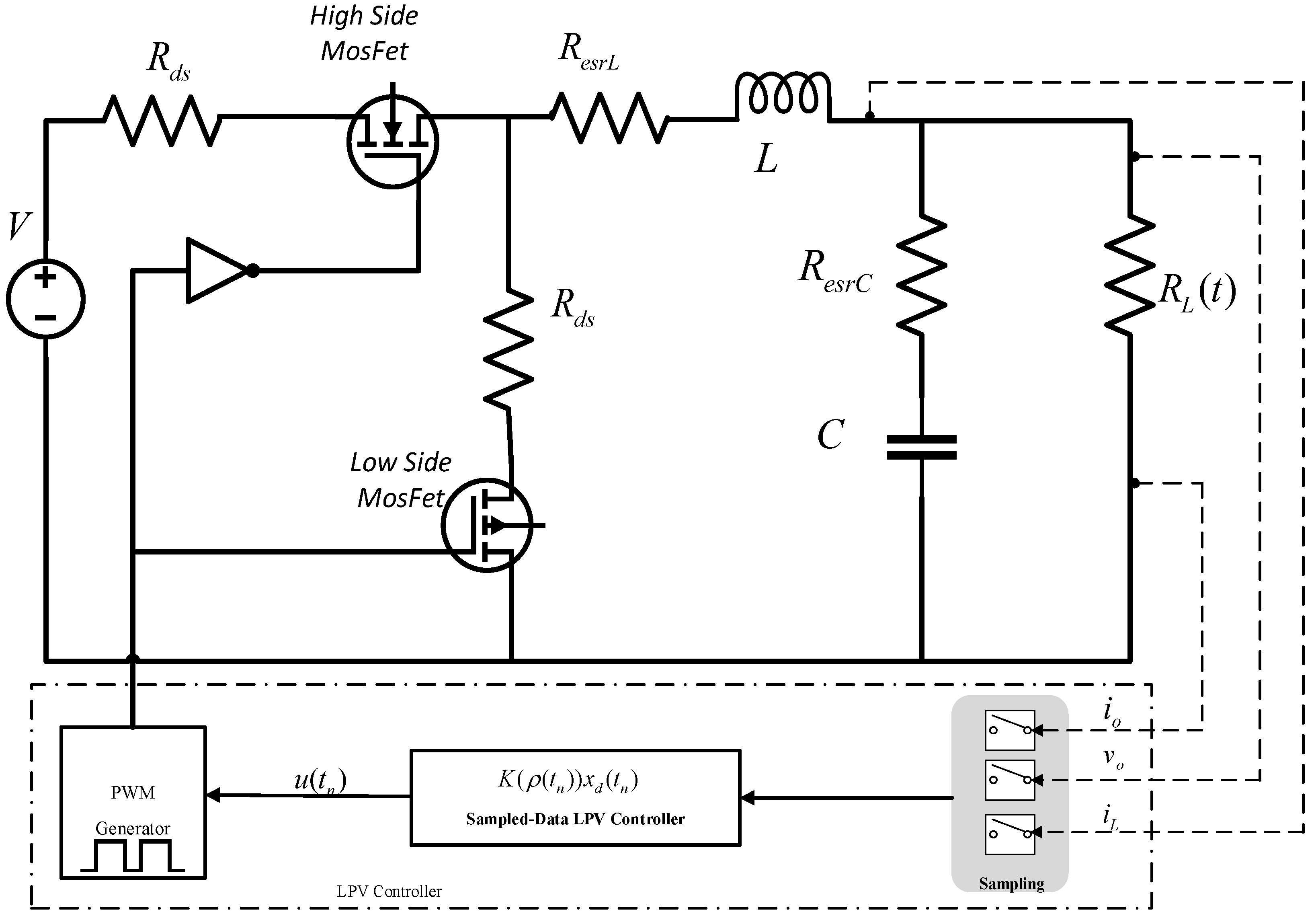
- By using the LPV approach, new theoretical results are provided, taking into account the nonlinear dynamics of the DC–DC buck converter and sampling and quantization of the measurements.
- (ii)
- It is shown that the proposed LKF provides suitable bilinear matrix inequality conditions to compute the nonlinear control law by considering the sampling period which is suitable for practical control with low-cost digital implementation.
2. Problem Formulation and Preliminaries
3. Problem Formulation
4. Simulation Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.; Wang, H.; Sangwongwanich, A.; Blaabjerg, F. Design for reliability of power electronic systems. In Power Electronics Handbook; Butterworth-Heinemann: Oxford, UK, 2018; pp. 1423–1440. [Google Scholar]
- Goyal, V.K.; Shukla, A. Isolated DC-DC Boost Converter for Wide Input Voltage Range and Wide Load Range Applications. IEEE Trans. Ind. Electron. 2020, 68, 9527–9539. [Google Scholar] [CrossRef]
- Park, J.; Choi, S. Design and control of a bidirectional resonant DC-DC converter for automotive engine/battery hybrid power generators. IEEE Trans. Power Electron. 2013, 29, 3748–3757. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, C.; Wen, C.; Wang, P. A novel composite nonlinear controller for stabilization of constant power load in DC microgrid. IEEE Trans. Smart Grid 2017, 10, 752–761. [Google Scholar] [CrossRef]
- Xu, Q.; Hu, X.; Wang, P.; Xiao, J.; Tu, P.; Wen, C.; Lee, M.Y. A decentralized dynamic power sharing strategy for hybrid energy storage system in autonomous DC microgrid. IEEE Trans. Ind. Electron. 2016, 64, 5930–5941. [Google Scholar] [CrossRef]
- Naayagi, R.T.; Forsyth, A.J.; Shuttleworth, R. High-power bidirectional DC-DC converter for aerospace applications. IEEE Trans. Power Electron. 2012, 27, 4366–4379. [Google Scholar] [CrossRef]
- Olalla, C.; Clement, D.; Rodriguez, M.; Maksimovic, D. Architectures and control of submodule integrated DC-DC converters for photovoltaic applications. IEEE Trans. Power Electron. 2012, 28, 2980–2997. [Google Scholar] [CrossRef]
- Qiu, Y.; Chen, X.; Zhong, C.; Qi, C. Limiting integral loop digital control for DC-DC converters subject to changes in load current and source voltage. IEEE Trans. Ind. Inform. 2014, 10, 1307–1316. [Google Scholar]
- Shi, L.F.; Jia, W.G. Mode-selectable high-efficiency low-quiescent-current synchronous buck DC-DC converter. IEEE Trans. Ind. Electron. 2013, 61, 2278–2285. [Google Scholar] [CrossRef]
- Du, H.; Cheng, Y.; He, Y.; Jia, R. Finite-time output feedback control for a class of second-order nonlinear systems with application to DC-DC buck converters. Nonlinear Dyn. 2014, 78, 2021–2030. [Google Scholar] [CrossRef]
- Salimi, M.; Soltani, J.; Markadeh, G.A.; Abjadi, N.R. Indirect output voltage regulation of DC-DC buck/boost converter operating in continuous and discontinuous conduction modes using adaptive backstepping approach. IET Power Electron. 2013, 6, 732–741. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zhao, J. Output feedback stabilization for a general class of nonlinear systems via sampleddata control. Int. J. Robust Nonlinear Control. 2018, 28, 2853–2867. [Google Scholar] [CrossRef]
- Ling, R.; Maksimovic, D.; Leyva, R. Second-order sliding-mode controlled synchronous buck DC-DC converter. IEEE Trans. Power Electron. 2015, 31, 2539–2549. [Google Scholar] [CrossRef]
- Zurita-Bustamante, E.W.; Linares-Flores, J.; Guzmán-Ramírez, E.; Sira-Ramírez, H. A comparison between the GPI and PID controllers for the stabilization of a DC-DC “buck” converter: A field programmable gate array implementation. IEEE Trans. Ind. Electron. 2011, 58, 5251–5262. [Google Scholar] [CrossRef]
- Seo, S.W.; Choi, H.H. Digital implementation of fractional order PID-type controller for boost DC-DC converter. IEEE Access 2019, 7, 142652–142662. [Google Scholar] [CrossRef]
- Alarcon-Carbajal, M.A.; Carvajal-Rubio, J.E.; Sanchez-Torres, J.D.; Castro-Palazuelos, D.E.; Rubio-Astorga, G.J. An Output Feedback Discrete-Time Controller for the DC-DC Buck Converter. Energies 2022, 15, 528. [Google Scholar] [CrossRef]
- Seguel, J.L.; Seleme, S.I., Jr. Robust Digital Control Strategy Based on Fuzzy Logic for a Solar Charger of VRLA Batteries. Energies 2021, 14, 1001. [Google Scholar] [CrossRef]
- Ni, Y.; Xu, J. Study of discrete global-sliding mode control for switching DC-DC converter. J. Circuits Syst. Comput. 2011, 20, 1197–1209. [Google Scholar] [CrossRef]
- Qian, C.; Du, H. Global output feedback stabilization of a class of nonlinear systems via linear sampled data control. IEEE Trans. Autom. Control 2012, 57, 2934–2939. [Google Scholar] [CrossRef]
- Chu, H.; Qian, C.; Yang, J.; Xu, S.; Liu, Y. Almost disturbance decoupling for a class of nonlinear systems via sampled data output feedback control. Int. J. Robust Nonlinear Control 2016, 26, 2201–2215. [Google Scholar] [CrossRef]
- Zhang, C.; Jia, R.; Qian, C.; Li, S. Semi global stabilization via linear sampled data output feedback for a class of uncertain nonlinear systems. Int. J. Robust Nonlinear Control 2015, 25, 2041–2061. [Google Scholar] [CrossRef]
- Hooshm, K.; Bayat, F.; Jahed-Motlagh, M.R.; Jalali, A. Robust sampled data control of nonlinear LPV systems: Time dependent functional approach. IET Control Theory Appl. 2018, 12, 1318–1331. [Google Scholar] [CrossRef]
- Hooshm, K.; Bayat, F.; Jahedmotlagh, M.; Jalali, A. Guaranteed cost nonlinear sampled data control: Applications to a class of chaotic systems. Nonlinear Dyn. 2020, 100, 731–748. [Google Scholar] [CrossRef]
- Hooshm, K.; Bayat, F.; Jahed-Motlagh, M.R.; Jalali, A.A. Polynomial LPV approach to robust H∞ control of nonlinear sampled-data systems. Int. J. Control 2020, 93, 2145–2160. [Google Scholar] [CrossRef]
- Hoffmann, C.; Werner, H. A survey of linear parameter-varying control applications validated by experiments or high-fidelity simulations. IEEE Trans. Control Syst. Technol. 2014, 23, 416–433. [Google Scholar] [CrossRef]
- Hetel, L.; Fiter, C.; Omran, H.; Seuret, A.; Fridman, E.; Richard, J.P.; Niculescu, S.I. Recent developments on the stability of systems with aperiodic sampling: An overview. Automatica 2017, 76, 309–333. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Grotstollen, H. Averaged modelling of switching power converters: Reformulation and theoretical basis. In Proceedings of the 23rd Annual IEEE Power Electronics Specialists Conference, Toledo, Spain, 29 June–3 July 1992; pp. 1165–1172. [Google Scholar]
- Briat, C. Convergence and equivalence results for the Jensen’s inequality—Application to time-delay and sampled-data systems. IEEE Trans. Autom. Control 2011, 56, 1660–1665. [Google Scholar] [CrossRef] [Green Version]
- Kocvara, M.; Stingl, M.; PENOPT GbR. PENBMI User’s Guide (Version 2.0); Software Manual, Hauptstrasse A; PENOPT GbR: Igensdorf, Germany, 2005; Volume 31, p. 91338. [Google Scholar]
- Joo, H.; Kim, S.H. LPV control with pole placement constraints for synchronous buck converters with piecewise-constant loads. Math. Probl. Eng. 2015, 2015, 686857. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| V (input power source) | 12 V |
| (Equilibrium point of ) | 5 V |
| L | 47 H |
| C | 220 F |
| 30 m | |
| 100 m | |
| 110 m | |
| 5–25 | |
| Switching frequency | 200 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hooshmandi, K.; Bayat, F.; Bartoszewicz, A. Sampled-Data Linear Parameter Variable Approach for Voltage Regulation of DC–DC Buck Converter. Electronics 2022, 11, 3208. https://doi.org/10.3390/electronics11193208
Hooshmandi K, Bayat F, Bartoszewicz A. Sampled-Data Linear Parameter Variable Approach for Voltage Regulation of DC–DC Buck Converter. Electronics. 2022; 11(19):3208. https://doi.org/10.3390/electronics11193208
Chicago/Turabian StyleHooshmandi, Kaveh, Farhad Bayat, and Andrzej Bartoszewicz. 2022. "Sampled-Data Linear Parameter Variable Approach for Voltage Regulation of DC–DC Buck Converter" Electronics 11, no. 19: 3208. https://doi.org/10.3390/electronics11193208
APA StyleHooshmandi, K., Bayat, F., & Bartoszewicz, A. (2022). Sampled-Data Linear Parameter Variable Approach for Voltage Regulation of DC–DC Buck Converter. Electronics, 11(19), 3208. https://doi.org/10.3390/electronics11193208