
Automatic Detection of Diseases in Tunnel Linings Based on a Convolution Neural Network and a Support Vector Machine

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Derivation of Disease Automatic Detection
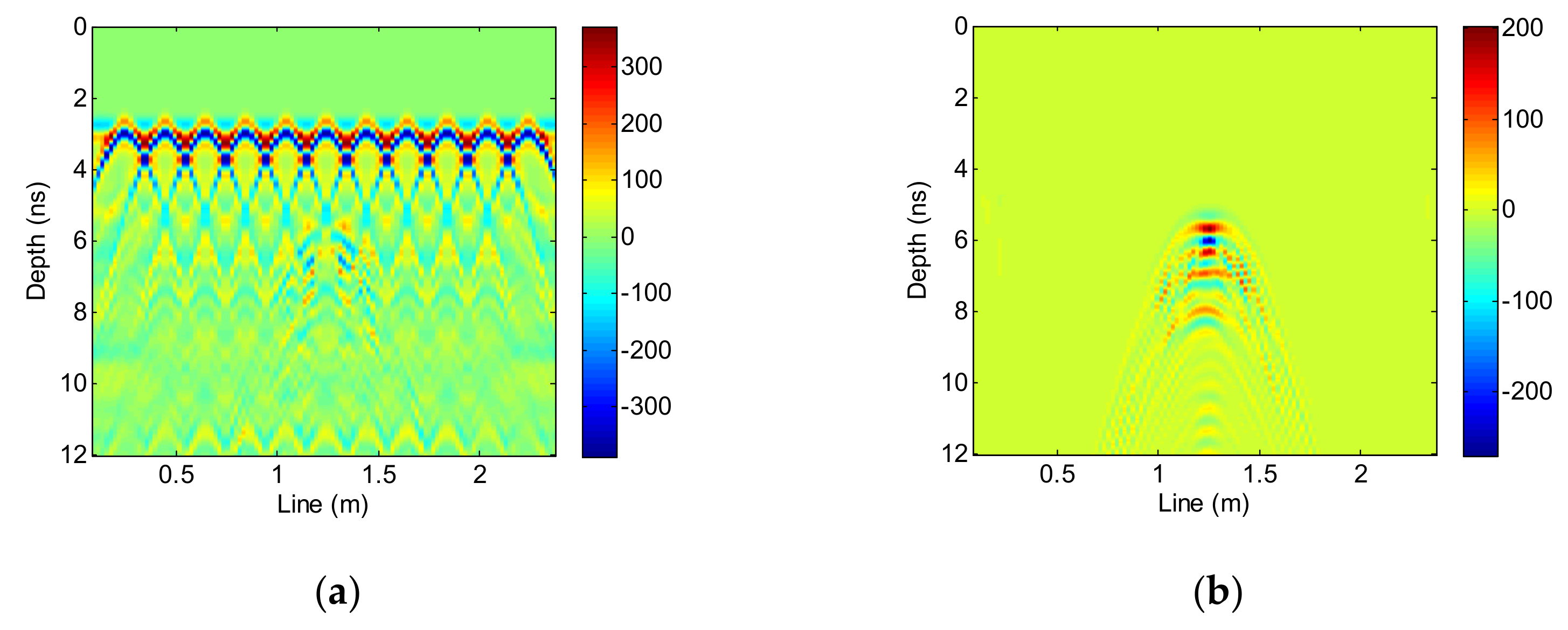
2.1. Clutter Suppression
- (1)
- GPR data model
- (2)
- State equation and measurement equation under
- (3)
- Kalman filtering under
- (4)
- Clutter suppression using Kalman filtering
2.2. Rebar Interference Suppression
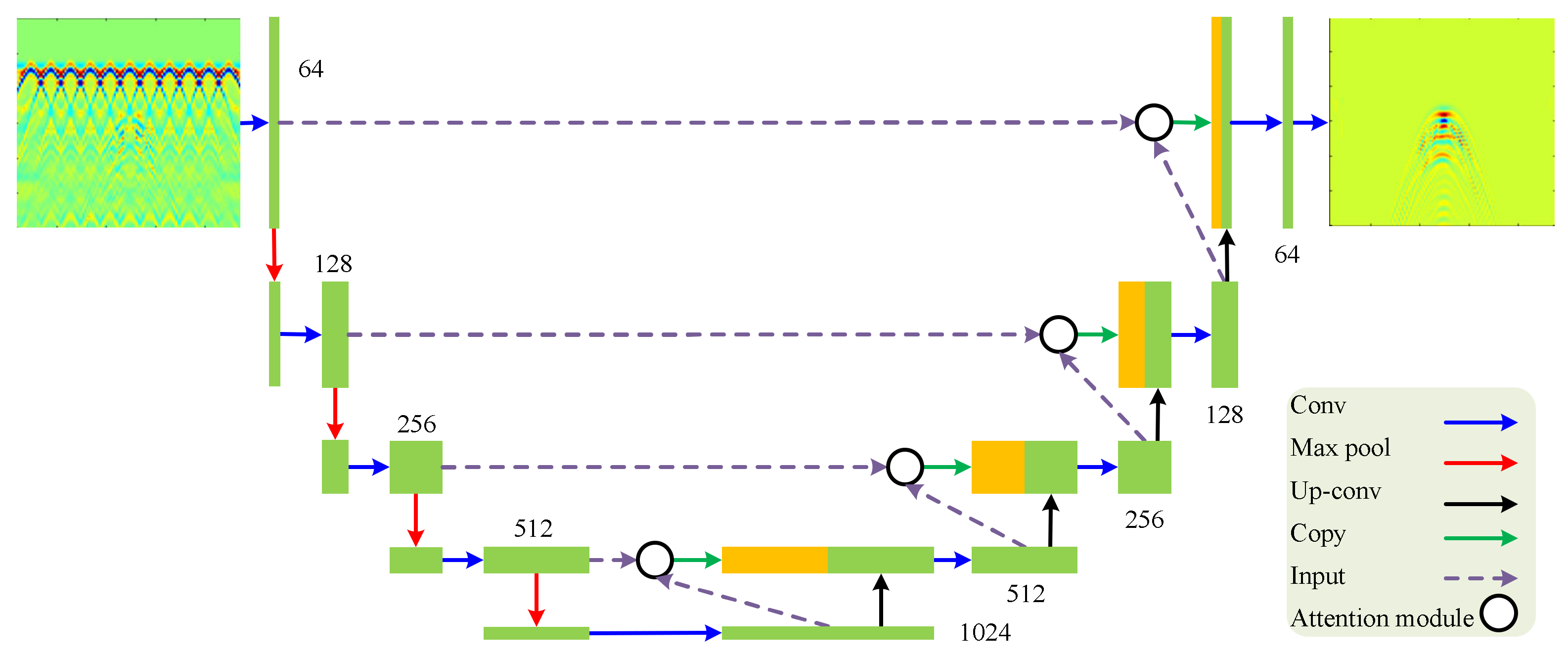
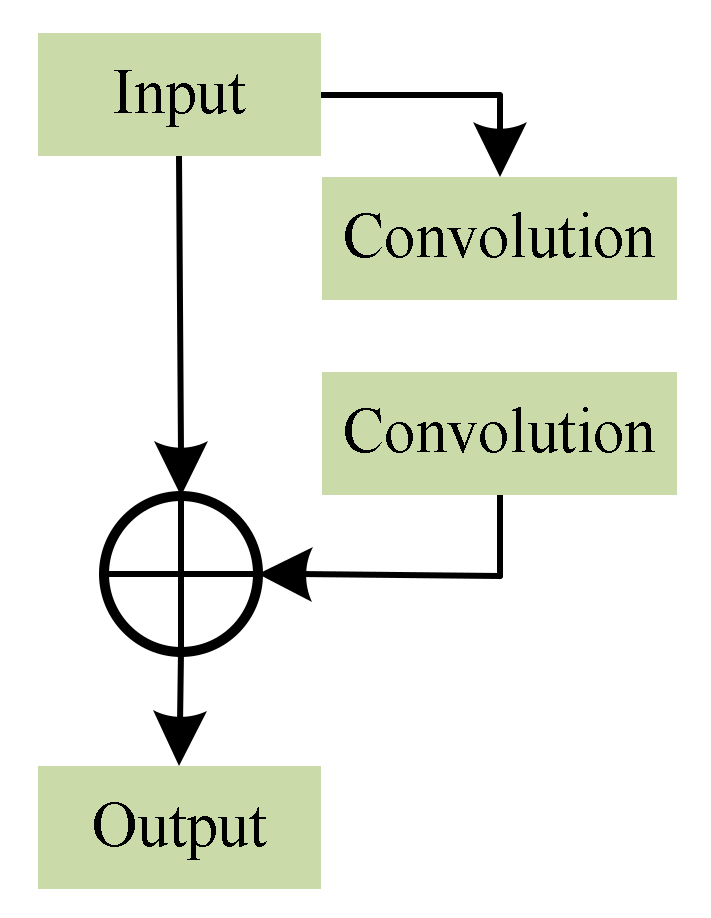
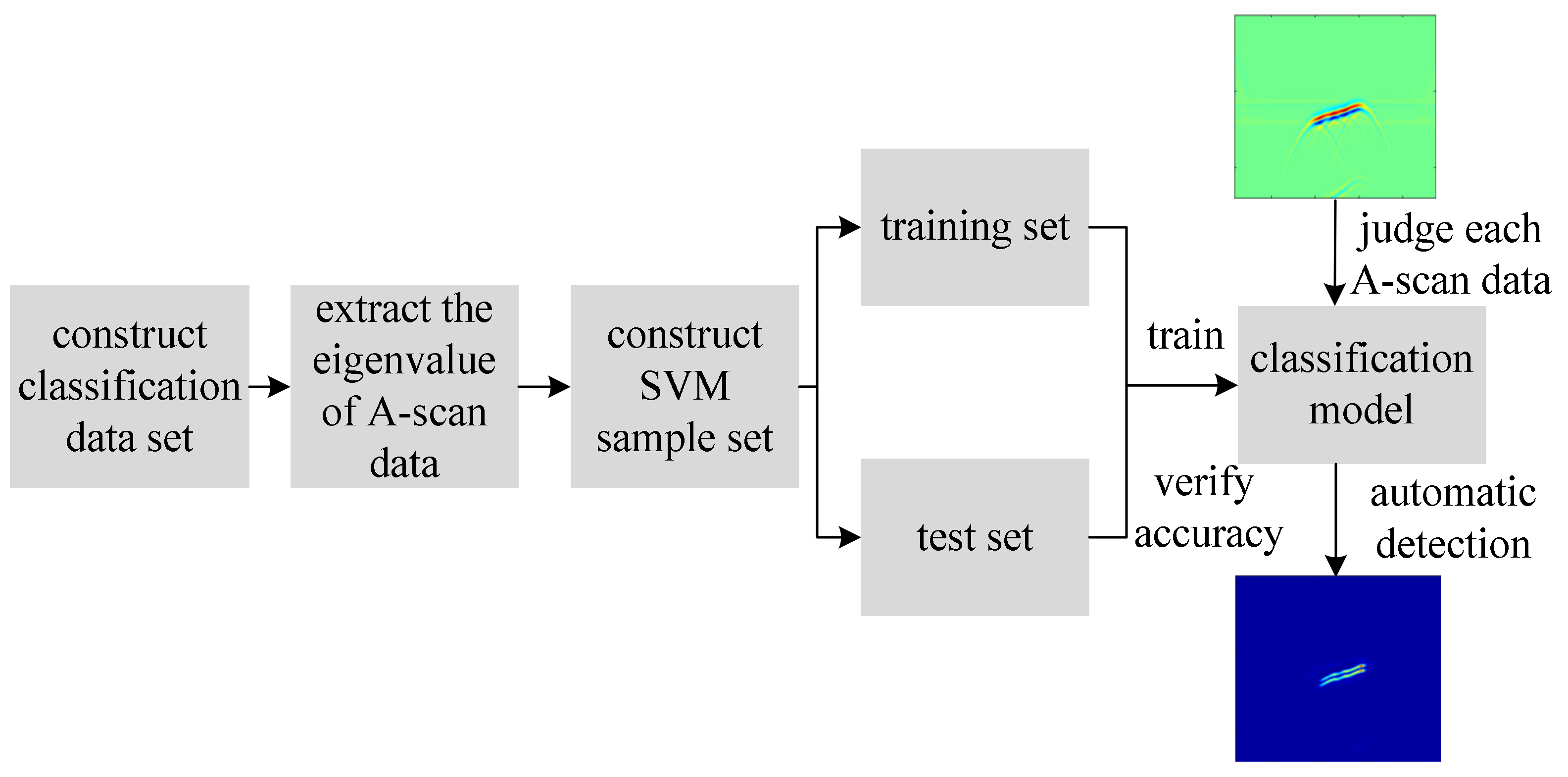
2.3. Automatic Disease Detection
3. Experimental Results
3.1. Establishing a Paired Disease Data Set
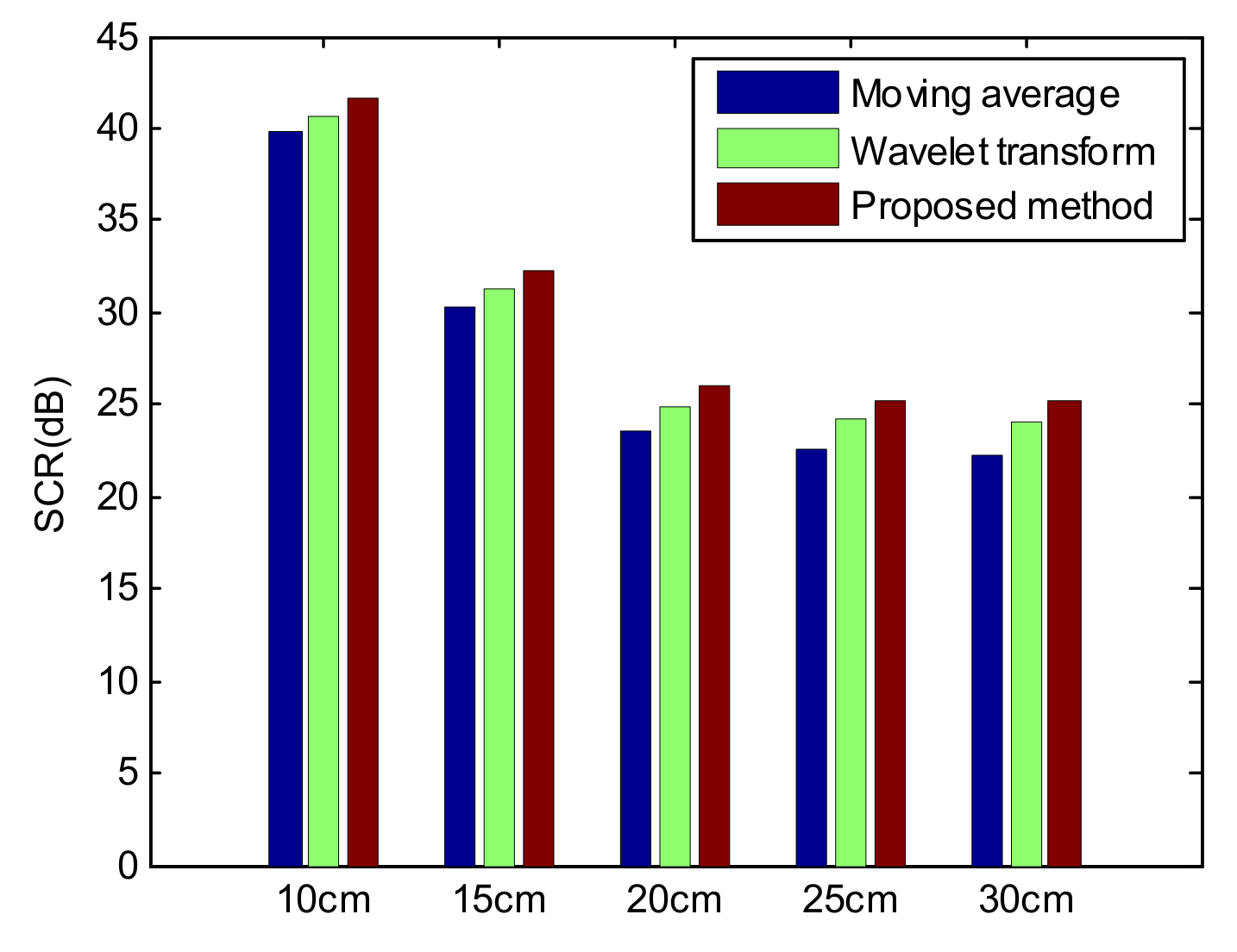
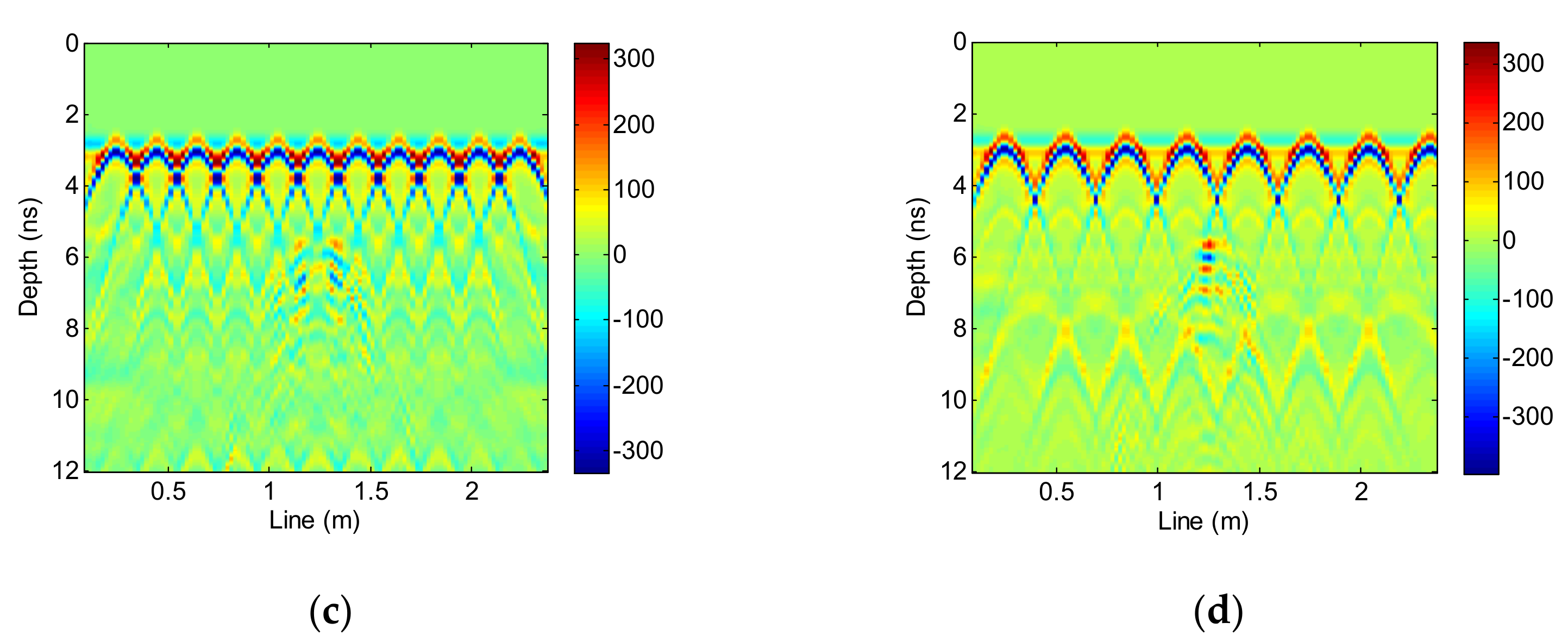
3.2. Results
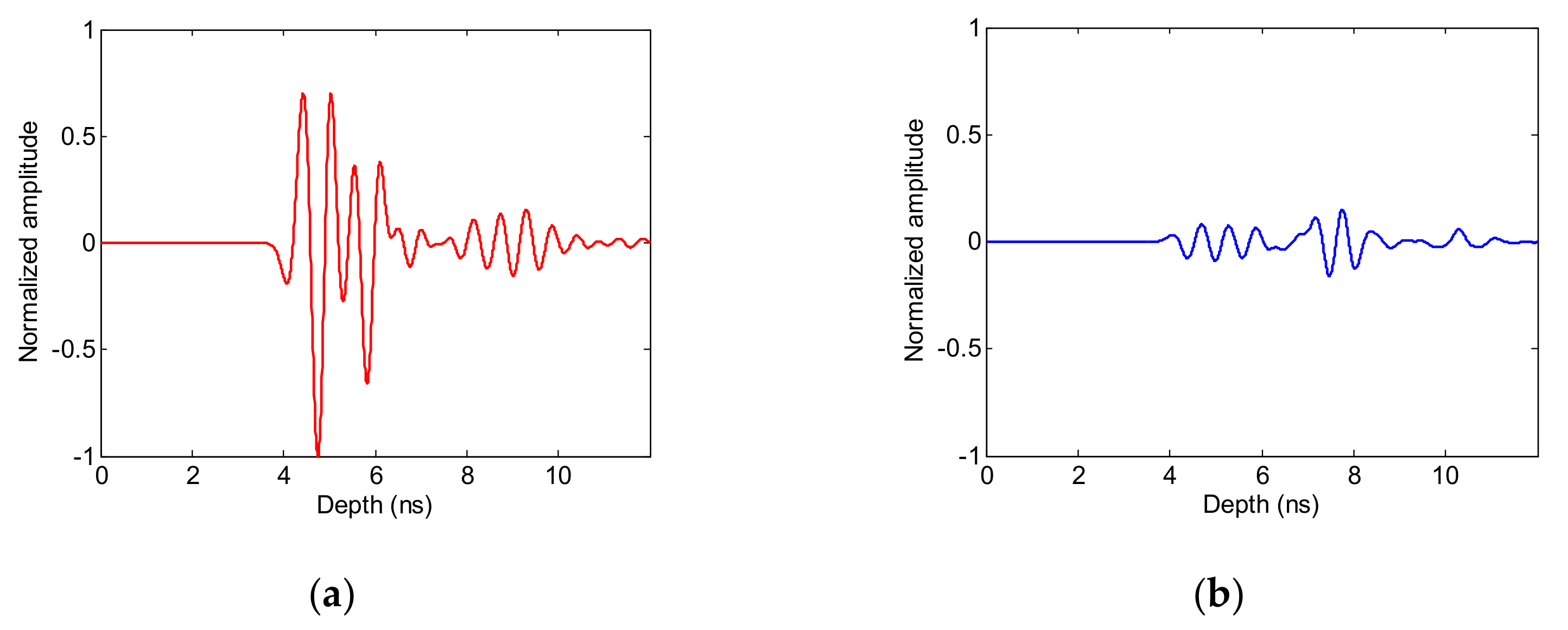
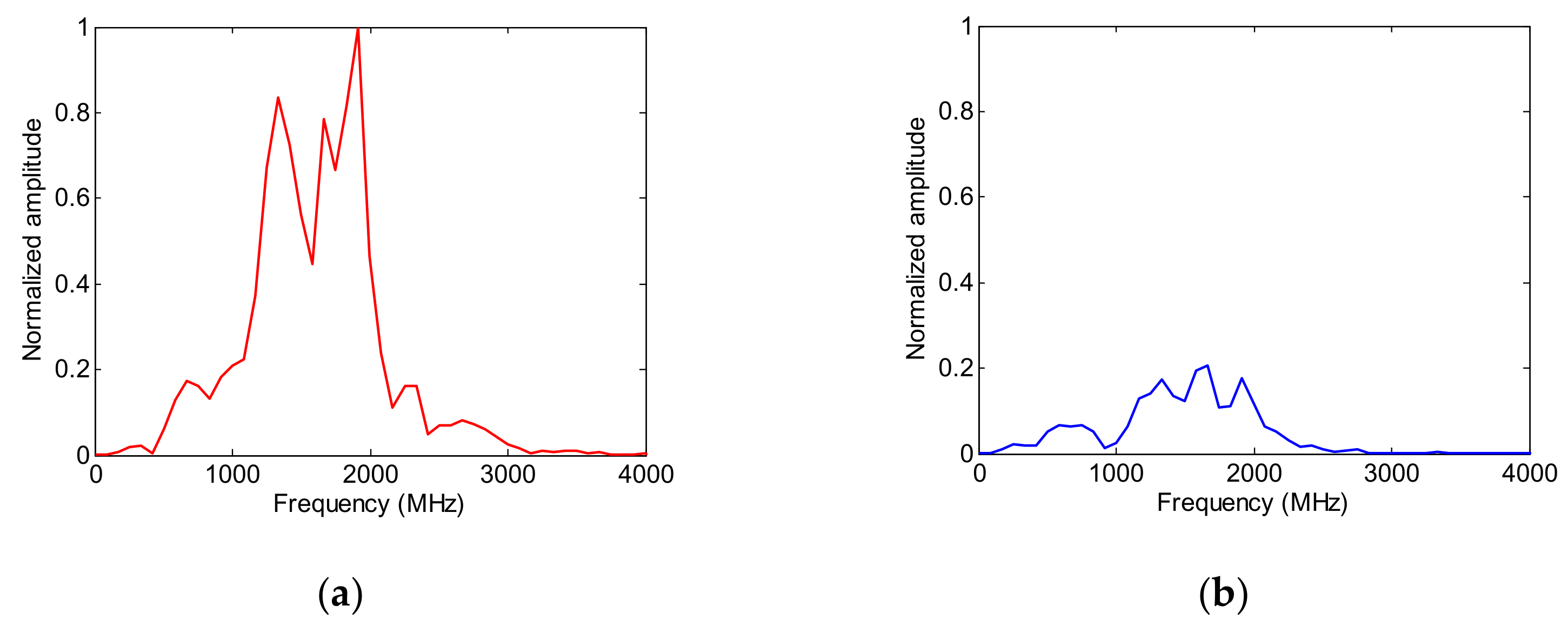
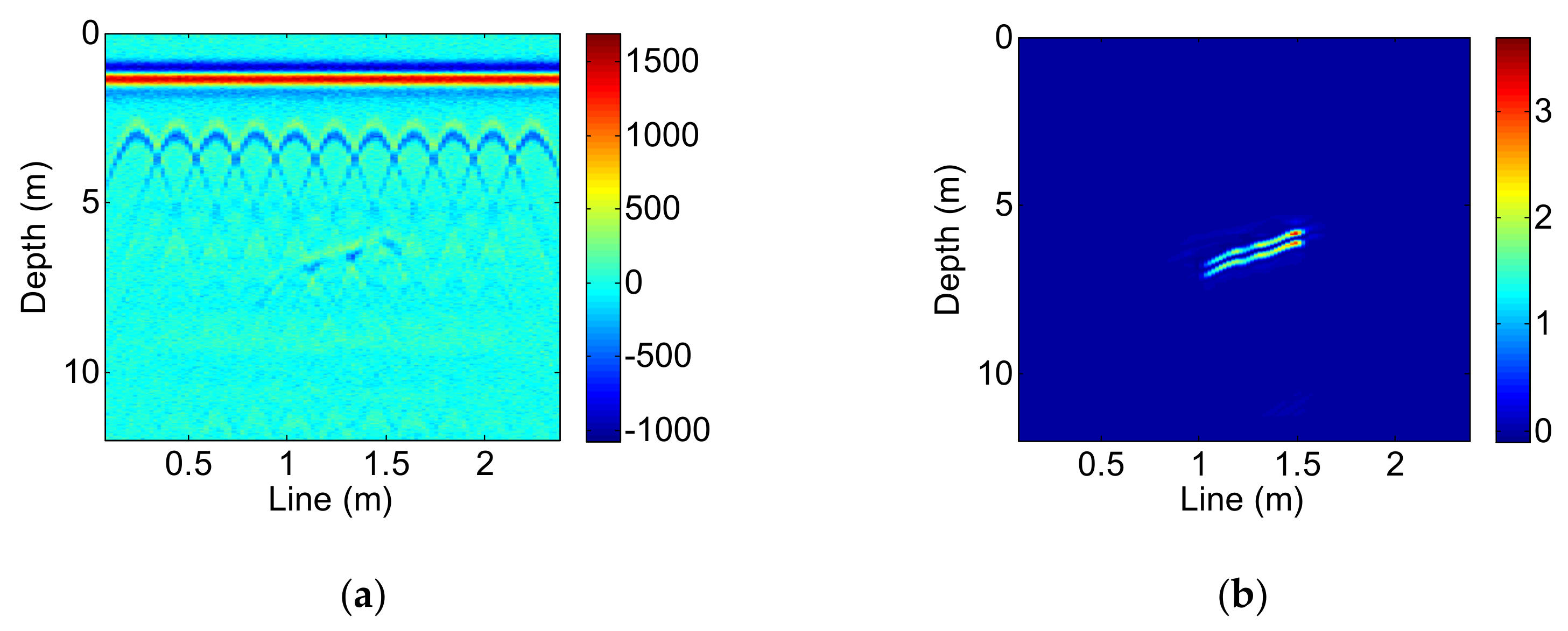
3.3. Rebar Interference Suppression Results
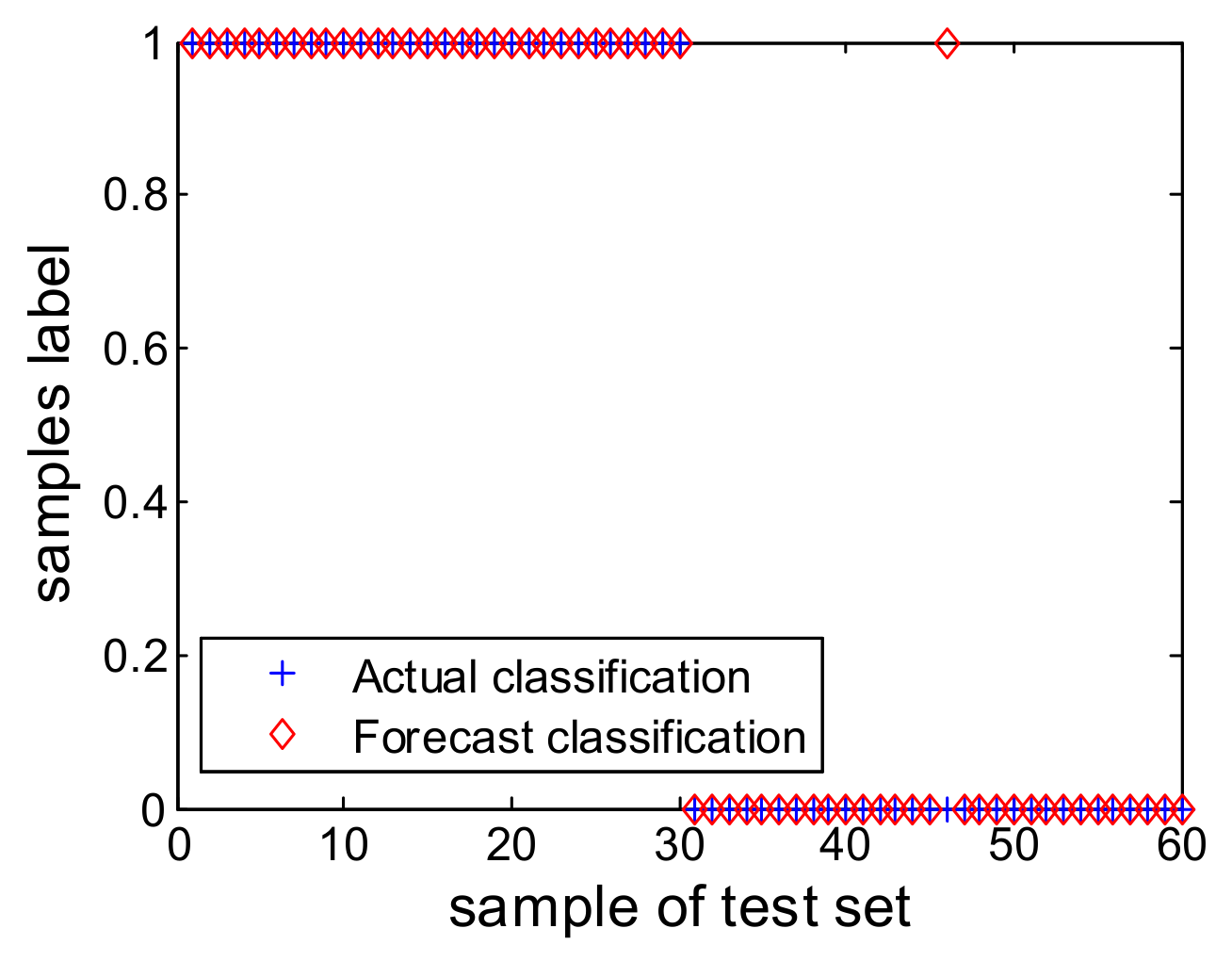
3.4. Disease Automatic Detection Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, X.R.; Shu, Z.L.; Zhu, C.H. Study of forward simulation for ground penetration radar three-dimensional detection of tunnel. Chin. J. Rock Mech. Eng. 2010, 29, 2221–2228. [Google Scholar]
- Shu, Z.L.; Liu, X.R.; Zhu, C.H. Study of model test about 3D GPR detection of tunnel lining cavity. Rock Soil Mech. 2011, 32, 551–558. [Google Scholar]
- Xu, H.; Liu, J.P.; Fan, C.Y. Forward modeling of tunnel lining diseases ground penetrating radar wave field and characteristics analysis. J. Cent. South Univ. (Sci. Technol.) 2013, 44, 4581–4587. [Google Scholar]
- Dong, Y.; Wang, J.; Wang, Z.; Zhang, X.; Gao, Y.; Sui, Q.; Jiang, P. A deep-learning based multiple defect detection method for tunnel lining damages. IEEE Access 2019, 7, 182643–182657. [Google Scholar] [CrossRef]
- Yan, T.; Yang, J.; Liu, Z.; Peng, A. Application of instantaneous amplitude gradient for ground penetrating radar signal analyses. Arab. J. Geosci. 2018, 11, 1–10. [Google Scholar] [CrossRef]
- Benedetto, F.; Tosti, F. A signal processing methodology for assessing the performance of ASTM standard test methods for GPR systems. Signal Process. 2017, 132, 327–337. [Google Scholar] [CrossRef]
- Li, Y.; Li, S.C.; Xu, L.; Liu, B.; Lin, C.J.; Zhang, F.K.; Yang, L. Forward simulation of ground penetrating radar and its application to detection of tunnel lining diseases. Rock Soil Mech. 2016, 37, 1001–1008. [Google Scholar]
- Ji, H.; Yin, B.; Zhang, J.; Zhang, Y. Joint Inversion of Evaporation Duct Based on Radar Sea Clutter and Target Echo Using Deep Learning. Electronics 2022, 11, 2157. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Bao, Z.; He, Y. Detection and Extraction of Target with Micro-Motion in Spiky Sea Clutter via Short-time Fractional Fourier Transform. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1002–1018. [Google Scholar] [CrossRef]
- Cheikh, K.; Soltani, F. Application of Neural Networks to Radar Signal Detection in K-distributed Clutter. IEEE Proc. Radar. Sonar. Navig. 2006, 153, 460–466. [Google Scholar] [CrossRef]
- Chang, J.; Fu, X.; Zhao, C.; Lang, P.; Feng, C. Distributed Radar Target Detection Based on RF-SSA in Non-Gaussian Noise. Electronics 2022, 11, 2319. [Google Scholar] [CrossRef]
- Bao, Q.Z.; Li, Q.C.; Chen, W.C. GPR data noise attenuation on the Curvelet transform. Appl. Geophys. 2014, 11, 301–310. [Google Scholar] [CrossRef]
- Wang, X.; Liu, S. Noise suppressing ang direct wave arrivals removal in GPR data based on Shearlet transform. Signal Process. 2017, 132, 227–242. [Google Scholar] [CrossRef]
- Yao, Q.; Chun-lin, H.; Min, L.; Wei, X. Adaptive clutter reduction based on wavelet transform and principal component analysis for ground penetrating radar. J. Radars 2015, 4, 445–451. [Google Scholar]
- Zhou, X.; Chen, H.; Li, J. An automatic GPR B-Scan image interpreting model. IEEE Trans. Geosci. Remote 2018, 56, 3398–3412. [Google Scholar] [CrossRef]
- Lei, W.; Hou, F.; Xi, J.; Tan, Q.; Xu, M.; Jiang, X.; Liu, G.; Gu, Q. Automatic hyperbola detection and fitting in GPR B-scan image. Autom. Constr. 2019, 106, 1–11. [Google Scholar] [CrossRef]
- Núñez-Nieto, X.; Solla, M.; Gómez-Pérez, P.; Lorenzo, H. GPR signal characterization for automated landmine and UXO detection based on machine learning techniques. Remote Sens. 2014, 6, 9729–9748. [Google Scholar] [CrossRef] [Green Version]
- Kaur, P.; Dana, K.J.; Romero, F.A.; Gucunski, N. Automated GPR rebar analysis for robotic bridge deck evaluation. IEEE Trans. Cybern. 2016, 46, 2265–2276. [Google Scholar] [CrossRef]
- Mahallawy, M.; Hashim, M. Material Classification of underground utilities from GPR images using DCT-based SVM approach. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1542–1546. [Google Scholar] [CrossRef]
- Jiang, W.; Ren, Y.; Liu, Y.; Leng, J. Artificial Neural Networks and Deep Learning Techniques Applied to Radar Target Detection: A Review. Electronics 2022, 11, 156. [Google Scholar] [CrossRef]
- Bhatia, J.; Dayal, A.; Jha, A.; Vishvakarma, S.K.; Joshi, S.; Srinivas, M.B.; Yalavarthy, P.K.; Kumar, A.; Lalitha, V.; Koorapati, S.; et al. Classification of Targets Using Statistical Features from Range FFT of mmWave FMCW Radars. Electronics 2021, 10, 1965. [Google Scholar] [CrossRef]
- Travassos, X.L.; Avila, S.L.; Ida, N. Artificial Neural Networks and Machine Learning techniques applied to Ground Penetrating Radar: A review. Appl. Comput. Inf. 2018, 17, 296–308. [Google Scholar] [CrossRef]
- Gao, J.; Lu, Y.; Qi, J.; Shen, L. A Radar Signal Recognition System Based on Non-Negative Matrix Factorization Network and Improved Artificial Bee Colony Algorithm. IEEE Access 2019, 7, 117612–117626. [Google Scholar] [CrossRef]
- Liao, K.; Si, J.; Zhu, F.; He, X. Radar HRRP Target Recognition Based on Concatenated Deep Neural Networks. IEEE Access 2018, 6, 29211–29218. [Google Scholar] [CrossRef]
- Chen, X.; Guan, J.; Huang, Y.; Liu, N.; He, Y. Radon-linear Canonical Ambiguity Function-based Detection and Estimation Method for Marine Target with Micromotion. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2225–2240. [Google Scholar] [CrossRef]
- Liu, T.; Su, Y.; Huang, C. Inversion of ground penetrating radar data based on neural networks. Remote Sens. 2018, 10, 730–738. [Google Scholar] [CrossRef] [Green Version]
- Tbarki, K. Adaptive landmine detection and localization system based on incremental one-class classification. J. Appl. Remote Sens. 2018, 12, 1–22. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Yuan, D. Advances of deep learning applications in ground-penetrating radar: A survey. Constr. Build. Mater. 2020, 258, 1–13. [Google Scholar] [CrossRef]
- Shahsavar, S.; Fakoor, M.; Berto, F. Mixed mode I/II fracture criterion to anticipate cracked composite materials based on a reinforced kinked crack along maximum shear stress path. Steel Compos. Struct. 2021, 39, 765–779. [Google Scholar]
- Erfani, S.; Vakili, A.; Akrami, V. Numerical investigation on the flexural links of eccentrically braced frames with web openings. Steel Compos. Struct. 2021, 39, 171–188. [Google Scholar]
- Wang, S.; Li, L.; Cheng, S.; Yang, J.; Jin, H.; Gao, S.; Wen, T. Study on an improved real-time monitoring and fusion prewarning method of water inrush in tunnels. Tunn. Undergr. Space Technol. 2021, 112, 103884. [Google Scholar] [CrossRef]
- Giannopoulos, A. Modelling ground penetrating radar by GprMax. Constr. Build. Mater. 2005, 19, 755–762. [Google Scholar] [CrossRef]
- Zoubir, A.M.; Chant, I.J.; Brown, C.L.; Barkat, B.; Abeynayake, C. Signal processing techniques for landmine detection using impulse ground penetrating radar. IEEE Sens. J. 2002, 2, 41–51. [Google Scholar] [CrossRef] [Green Version]
- Carevic, D. Clutter reduction and target detection in Ground Penetrating Radar data using wavelets. Proc. SPIE 1999, 3710, 973–978. [Google Scholar] [CrossRef]



















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, L.; Zhang, Q.; Zhang, R. Automatic Detection of Diseases in Tunnel Linings Based on a Convolution Neural Network and a Support Vector Machine. Electronics 2022, 11, 3290. https://doi.org/10.3390/electronics11203290
Hou L, Zhang Q, Zhang R. Automatic Detection of Diseases in Tunnel Linings Based on a Convolution Neural Network and a Support Vector Machine. Electronics. 2022; 11(20):3290. https://doi.org/10.3390/electronics11203290
Chicago/Turabian StyleHou, Lili, Qian Zhang, and Ruixue Zhang. 2022. "Automatic Detection of Diseases in Tunnel Linings Based on a Convolution Neural Network and a Support Vector Machine" Electronics 11, no. 20: 3290. https://doi.org/10.3390/electronics11203290
APA StyleHou, L., Zhang, Q., & Zhang, R. (2022). Automatic Detection of Diseases in Tunnel Linings Based on a Convolution Neural Network and a Support Vector Machine. Electronics, 11(20), 3290. https://doi.org/10.3390/electronics11203290