
Wound Rotor Synchronous Motor as Promising Solution for Traction Applications
 ,
,  , and
, and
Abstract
:1. Introduction
2. Machine Design Consideration and Wound Rotor Design
2.1. Machine Design Consideration
2.2. Wound Rotor Design
3. 2-D FEA and Rotor Pole Shape Optimization
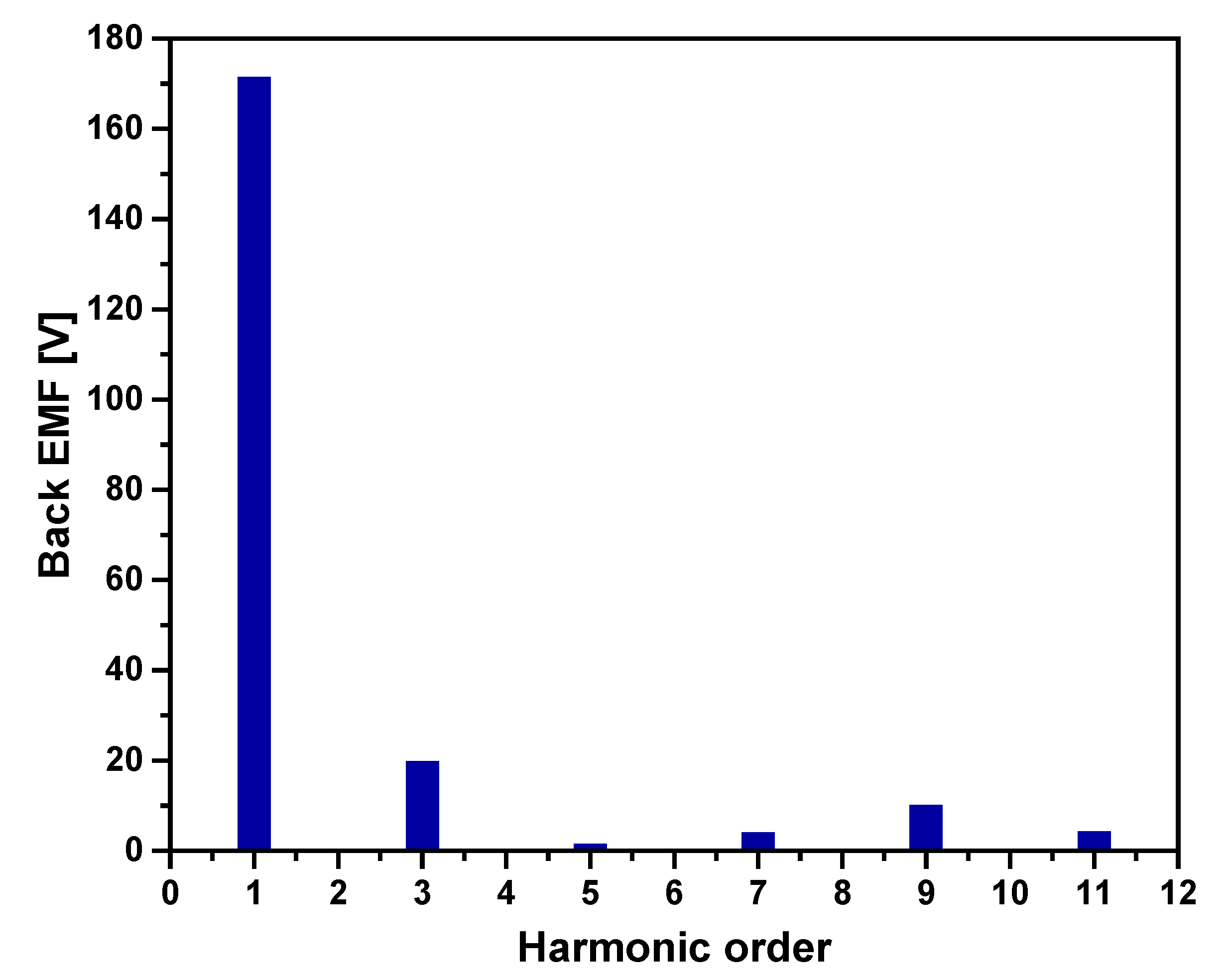
3.1. 2-D FEA of Basic Model
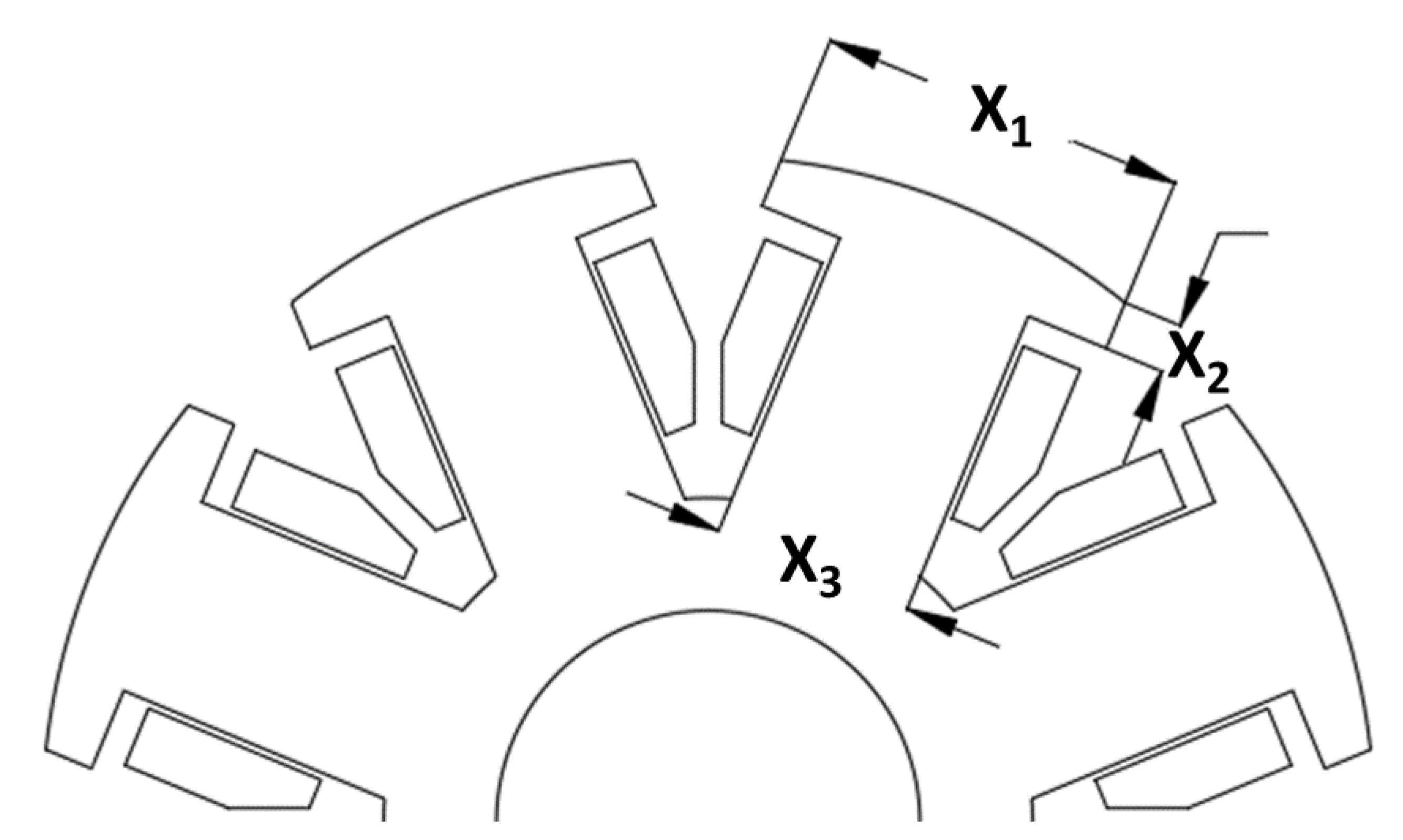
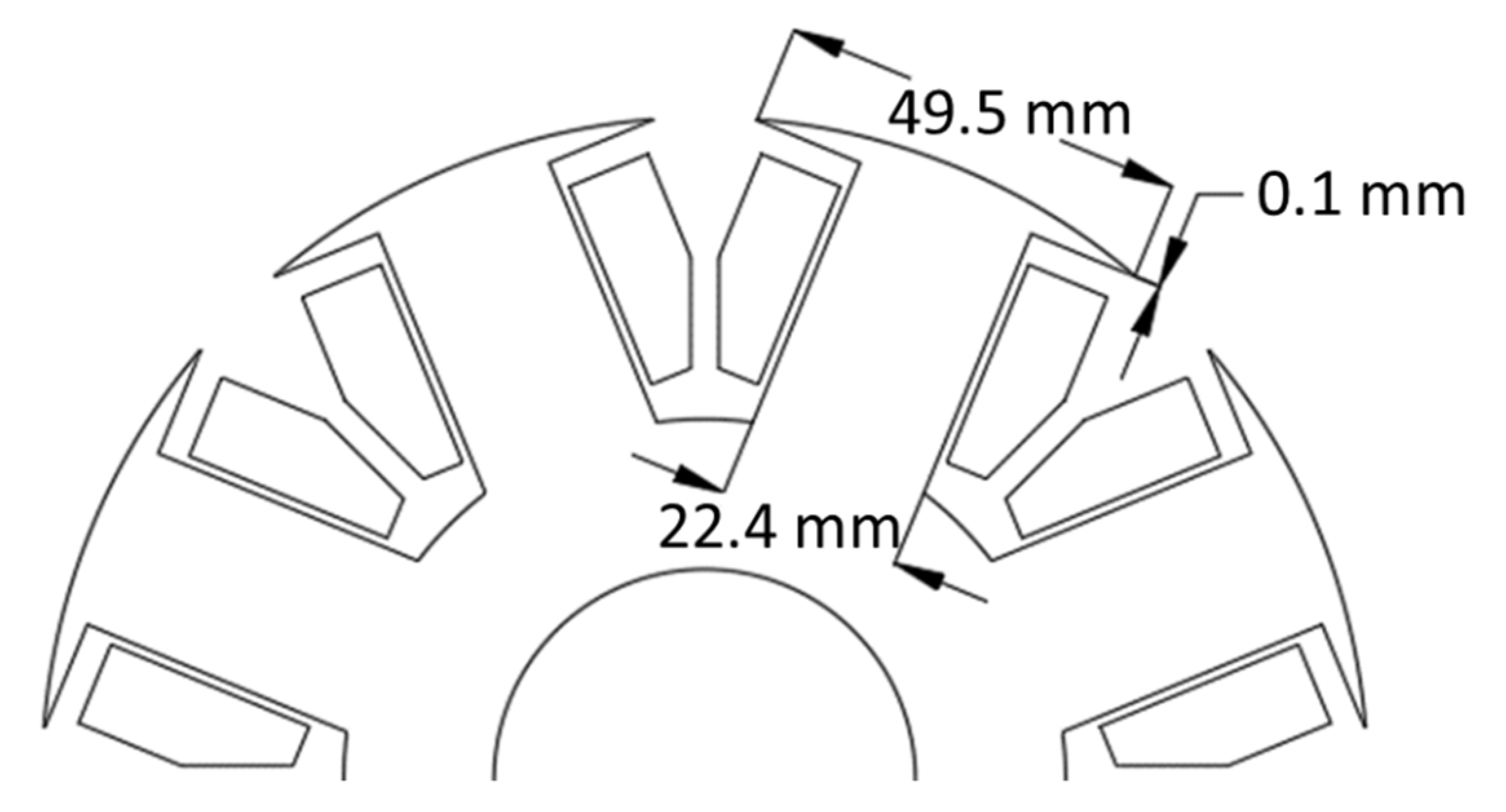
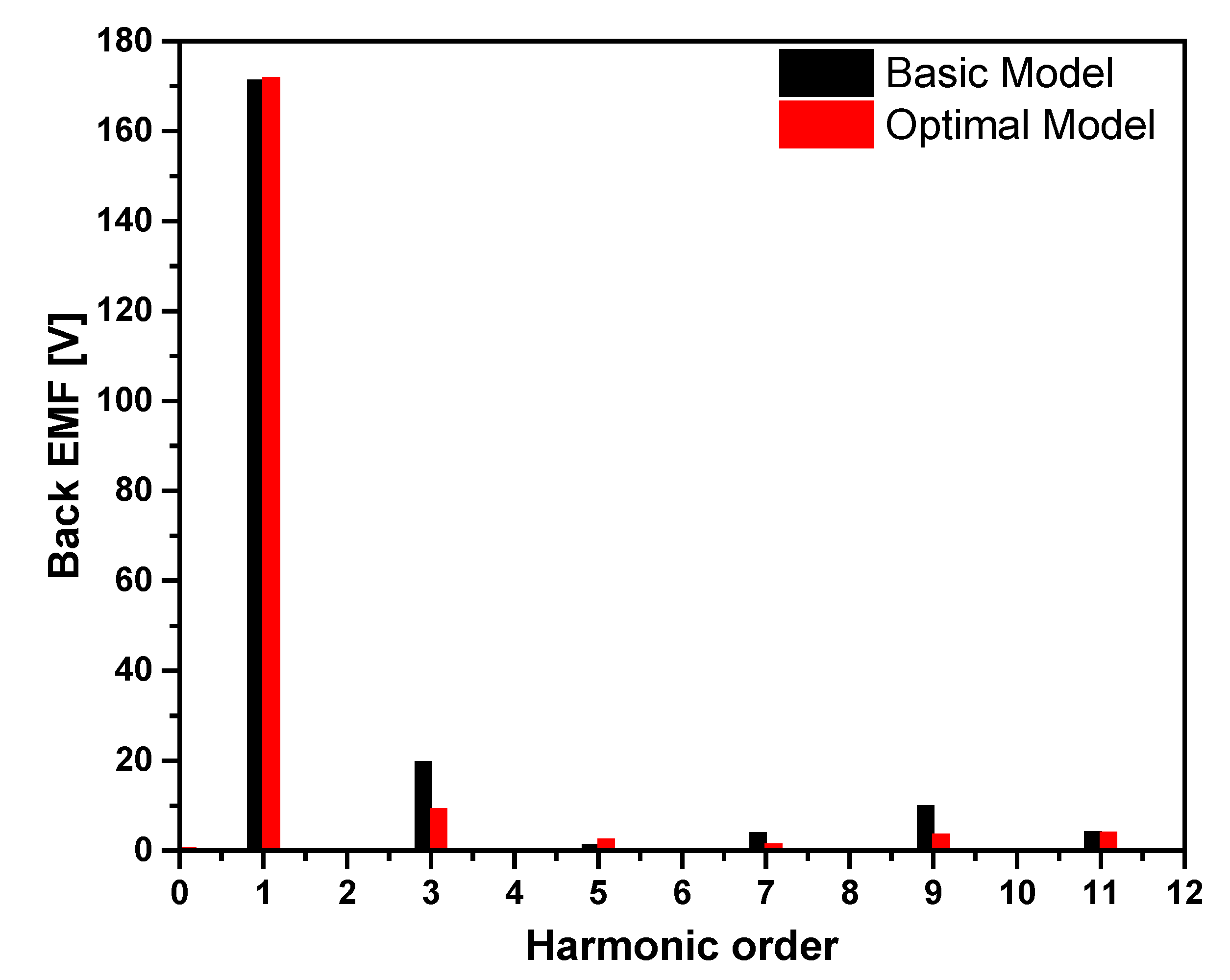
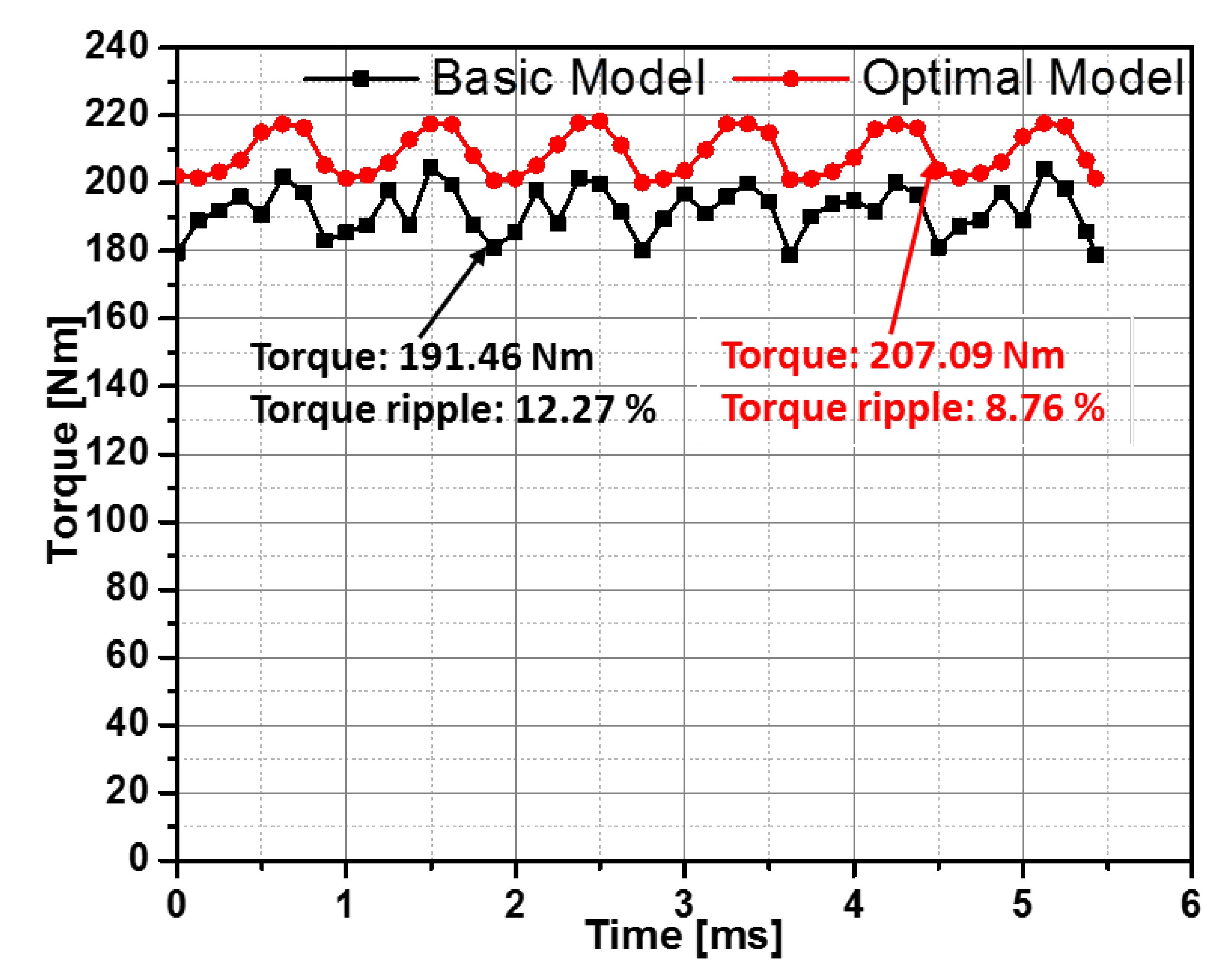
3.2. The Optimization of Rotor Pole Shape and Performance Comparison with Basic Model
- Objectivefunctions:
- Constraint:
- Design variables:
- Optimized variables:
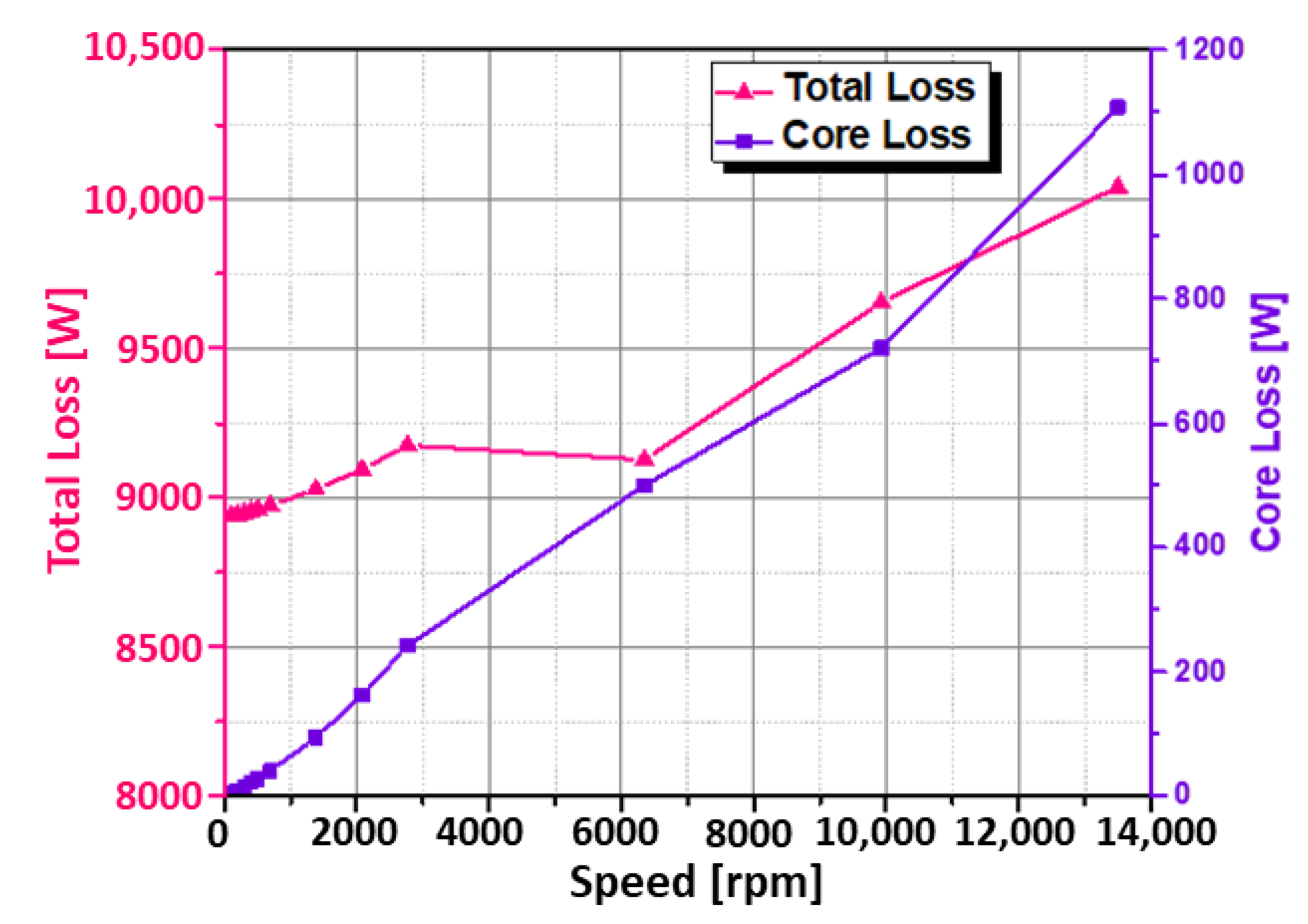
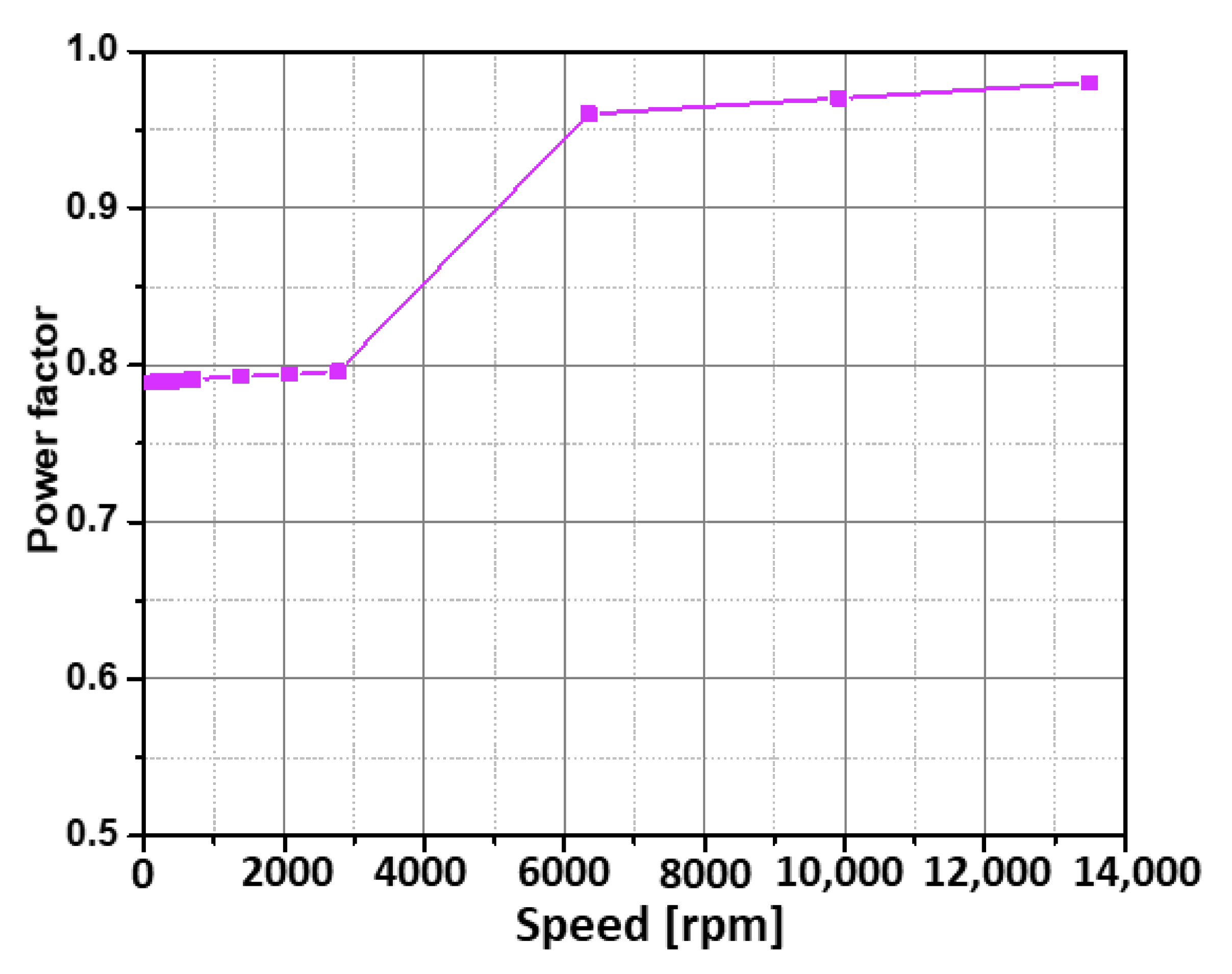
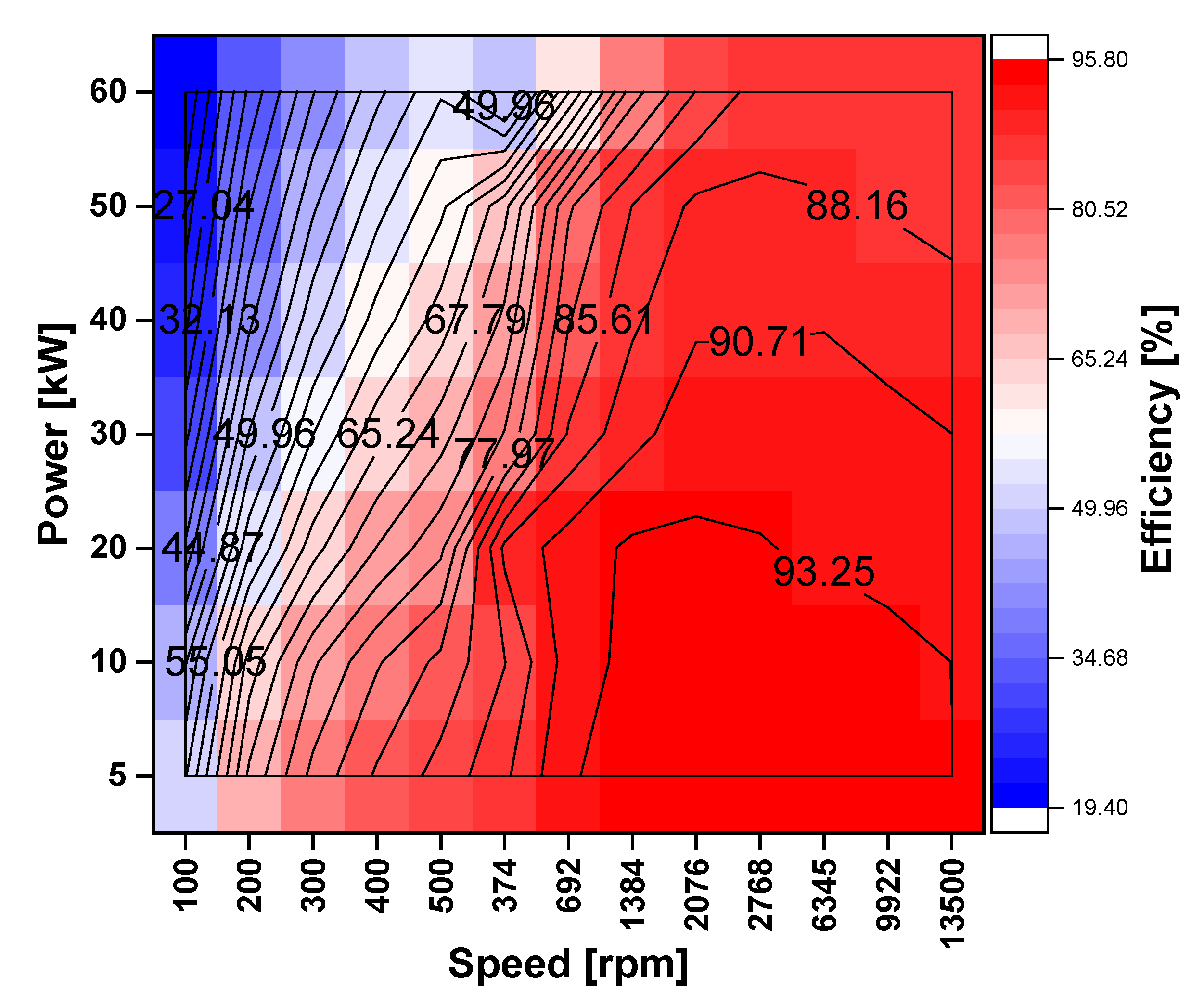
4. Wide Speed Range Operation of WRSM
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dorrell, D.G.; Knight, A.M.; Evans, L.; Popescu, M. Analysis and design techniques applied to hybrid vehicle drive machines—Assessment of alternative IPM and induction motor topologies. IEEE Trans. Ind. Electron. 2012, 59, 3690–3699. [Google Scholar] [CrossRef]
- Goss, J.; Popescu, M.; Staton, D. A comparison of an interior permanent magnet and copper rotor induction motor in a hybrid electric vehicle application. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013; pp. 220–225. [Google Scholar]
- Dorrell, D.G.; Knight, A.M.; Popescu, M.; Evans, L.; Staton, D.A. Comparison of different motor design drives for hybrid electric vehicles. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; IEEE: New York, NY, USA, 2010; pp. 3352–3359. [Google Scholar]
- Chiba, A.; Takano, Y.; Takeno, M.; Imakawa, T.; Hoshi, N.; Takemoto, M.; Ogasawara, S. Torque density and efficiency improvements of a switched reluctance motor without rare-earth material for hybrid vehicles. IEEE Trans. Ind. Appl. 2011, 47, 1240–1246. [Google Scholar] [CrossRef]
- Pellegrino, G.; Vagati, A.; Boazzo, B.; Guglielmi, P. Comparison of induction and PM synchronous motor drives for EV application including design examples. IEEE Trans. Ind. Appl. 2012, 48, 2322–2332. [Google Scholar] [CrossRef] [Green Version]
- Cai, H.; Guan, B.; Xu, L. Low-cost ferrite PM-assisted synchronous reluctance machine for electric vehicles. IEEE Trans. Ind. Electron. 2014, 10, 5741–5748. [Google Scholar] [CrossRef]
- Lipo, T.A.; Du, Z.S. Synchronous motor drives-a forgotten option. In Proceedings of the 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (ELECTROMOTION), Side, Turkey, 2–4 September 2015; IEEE: New York, NY, USA, 2015; pp. 1–5. [Google Scholar]
- Illiano, D.I.E. A separately excited synchronous motor as high efficient drive in Electric Vehicles. ATZelektron. Worldw. 2013, 8, 44–49. [Google Scholar] [CrossRef]
- Bortis, D.; Fässler, L.; Looser, A.; Kolar, J.W. Analysis of rotary transformer concepts for high-speed applications. In Proceedings of the 2013 Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 17–21 March 2013; IEEE: New York, NY, USA, 2013; pp. 3262–3269. [Google Scholar]
- Krupp, H.; Mertens, A. Rotary transformer design for brushless electrically excited synchronous machines. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; IEEE: New York, NY, USA, 2015; pp. 1–6. [Google Scholar]
- Dajaku, G.; Gerling, D. New self-excited synchronous machine with tooth concentrated winding. In Proceedings of the 3rd International Electric Drives and Production Conference (EDPC-2013), Nuremberg, Germany, 29–30 October 2013; Volume 29, p. 30. [Google Scholar]
- Aoyama, M.; Noguchi, T. Rare-earth free motor with field poles excited by space harmonics—Current phase-torque characteristics of self-excitation synchronous motor. In Proceedings of the 2013 International Conference on Renewable Energy Research and Applications (ICRERA), Madrid, Spain, 20–23 October 2013; IEEE: New York, NY, USA, 2013; pp. 149–154. [Google Scholar]
- Ali, Q.; Lipo, T.A.; Kwon, B.I. Design and analysis of a novel brushless wound rotor synchronous machine. IEEE Trans. Magn. 2015, 51, 8109804. [Google Scholar] [CrossRef]
- Hussain, A.; Kwon, B.I. A new brushless wound rotor synchronous machine using a special stator winding arrangement. Electr. Eng. 2018, 100, 1797–1804. [Google Scholar] [CrossRef]
- Hussain, A.; Atiq, S.; Kwon, B.I. Optimal design and experimental verification of wound rotor synchronous machine using subharmonic excitation for brushless operation. Energies 2018, 11, 554. [Google Scholar] [CrossRef] [Green Version]
- Hussain, A.; Ayub, M.; Yazdan, T.; Kwon, B. Dual Mode Dual Stator Wound Rotor Synchronous Machine for Variable Speed Applications. In Proceedings of the 2018 IEEE International Magnetics Conference (INTERMAG), Singapore, 23–27 April 2018; IEEE: New York, NY, USA, 2018; p. 1. [Google Scholar]
- Hussain, A.; Atiq, S.; Kwon, B.I. Consequent-pole hybrid brushless wound-rotor synchronous machine. IEEE Trans. Magn. 2018, 54, 8206205. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Shah, M.A.; Rodas, J.; Bajaj, M.; Ro, J.S. Novel Sub-Harmonic-Based Self-Excited Brushless Wound Rotor Synchronous Machine Nouvelle machine synchrone à rotor bobiné sans balais auto-excitée à base de sous-harmoniques. IEEE Can. J. Electr. Comput. Eng. 2022, 45, 365–374. [Google Scholar] [CrossRef]
- Ayub, M.; Hussain, A.; Jawad, G.; Kwon, B.I. Brushless operation of a wound-field synchronous machine using a novel winding scheme. IEEE Trans. Magn. 2019, 55, 8201104. [Google Scholar] [CrossRef]
- Yao, F.; An, Q.; Gao, X.; Sun, L.; Lipo, T.A. Principle of operation and performance of a synchronous machine employing a new harmonic excitation scheme. IEEE Trans. Ind. Appl. 2015, 51, 3890–3898. [Google Scholar] [CrossRef]
- Jawad, G.; Ali, Q.; Lipo, T.A.; Kwon, B.I. Novel brushless wound rotor synchronous machine with zero-sequence third-harmonic field excitation. IEEE Trans. Magn. 2016, 52, 8106104. [Google Scholar] [CrossRef]
- Ayub, M.; Hussain, A.; Sirewal, G.J.; Kwon, B.I. Wye-delta winding configuration for brushless operation of a wound field synchronous machine. Int. J. Appl. Electromagn. Mech. 2020, 64, 1165–1172. [Google Scholar] [CrossRef]
- Ayub, M.; Sirewal, G.J.; Bukhari, S.S.H.; Kwon, B.I. Brushless wound rotor synchronous machine with third-harmonic field excitation. Electr. Eng. 2020, 102, 259–265. [Google Scholar] [CrossRef]
- Burress, T.A.; Campbell, S.L.; Coomer, C.; Ayers, C.W.; Wereszczak, A.A.; Cunningham, J.P.; Marlino, L.D.; Seiber, L.E.; Lin, H.T. Evaluation of the 2010 Toyota Prius Hybrid Synergy Drive System; (No. ORNL/TM-2010/253); Power Electronics and Electric Machinery Research Facility, Oak Ridge National Lab (ORNL): Oak Ridge, TN, USA, 2011. [Google Scholar]
- Lipo, T.A. Introduction to AC Machine Design; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Sawhney, A.K.; Chakrabarti, A. Course in Electrical Machine Design; Dhanpat Rai: Delhi, India, 2010. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Units | Value |
|---|---|---|
| Power (rated) | kW | 60 |
| Speed (rated) | rpm | 2768 |
| Outer diameter (stator) | mm | 264 |
| Inner diameter (stator) | mm | 161.9 |
| Stator slots | - | 48 |
| No. of poles | - | 8 |
| Stack length | mm | 50.8 |
| Airgap length | mm | 0.73 |
| Parameter | Units | Value |
|---|---|---|
| Rated power | kW | 60 |
| Stator turns per phase | - | 64 |
| Stator current | Arms | 178.5 |
| Stator winding resistance per phase | Ω | 0.066 |
| Stator current density | A/mm2 | 16.68 |
| Rotor outer diameter | mm | 160.44 |
| Shaft diameter | mm | 51 |
| Field winding turns per pole | - | 160 |
| Field current | A | 25 |
| Rotor current density | A/mm2 | 14.8 |
| Field winding resistance | Ω | 4.2 |
| Pole span | mm | 44.9 |
| Shoe height for pole | mm | 5.9 |
| Body width for pole | mm | 24.6 |
| Body height for pole | mm | 34 |
| Parameter | Units | WRSM (Basic Model) |
|---|---|---|
| Back EMF | Vrms | 120.5 |
| Torque | Nm | 191.46 |
| Torque ripple | % | 12.27 |
| Efficiency | % | 85.77 |
| Parameter | Units | WRSM (Basic Model) | WRSM (Optimal Model) | |
|---|---|---|---|---|
| FEA | Algorithm | FEA | ||
| Back EMF | Vrms | 120.5 | 120.4 | 120.0 |
| Torque | Nm | 191.46 | 207.2 | 207.09 |
| Torque ripple | % | 12.27 | 8.75 | 8.76 |
| Efficiency | % | 85.77 | 86.90 | 86.74 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, A.; Baig, Z.; Toor, W.T.; Ali, U.; Idrees, M.; Shloul, T.A.; Ghadi, Y.Y.; Alkahtani, H.K. Wound Rotor Synchronous Motor as Promising Solution for Traction Applications. Electronics 2022, 11, 4116. https://doi.org/10.3390/electronics11244116
Hussain A, Baig Z, Toor WT, Ali U, Idrees M, Shloul TA, Ghadi YY, Alkahtani HK. Wound Rotor Synchronous Motor as Promising Solution for Traction Applications. Electronics. 2022; 11(24):4116. https://doi.org/10.3390/electronics11244116
Chicago/Turabian StyleHussain, Asif, Zafar Baig, Waqas Tariq Toor, Usman Ali, Muhammad Idrees, Tamara Al Shloul, Yazeed Yasin Ghadi, and Hend Khalid Alkahtani. 2022. "Wound Rotor Synchronous Motor as Promising Solution for Traction Applications" Electronics 11, no. 24: 4116. https://doi.org/10.3390/electronics11244116
APA StyleHussain, A., Baig, Z., Toor, W. T., Ali, U., Idrees, M., Shloul, T. A., Ghadi, Y. Y., & Alkahtani, H. K. (2022). Wound Rotor Synchronous Motor as Promising Solution for Traction Applications. Electronics, 11(24), 4116. https://doi.org/10.3390/electronics11244116