1. Introduction
The vision-based object tracking problem lies in the field of computer vision. It is one of the hot topics of this field because of its large number of applications. In the past decade, the computer vision community has conducted significant work on correlation filter-based tracking algorithms. These algorithms have shown superiority in terms of computational cost. Another advantage of correlation filter-based visual object tracking is its online learning process, which allows updating the template/model in every frame of a video [
1,
2].
Although a lot of work has been completed on this topic, it is still demanding the attention of the computer vision research community because of associated unwanted factors that ultimately degrade any tracking algorithm’s performance. These factors are deformation, partial/full occlusion, out-of-plane rotation of the object, in-plane rotation of the object, the fast and abrupt motion of the object, scale variations, and finally, illumination changes in a video.
Tracking methods may be characterized into two main categories, i.e., (i) deep feature-based methods and (ii) simple hand-crafted feature-based tracking methods. Deep feature-based tracking methods have gained the attention of the tracking community because of their higher accuracy [
3,
4]. The major issue with these types of tracking methods is the requirement of a higher processing unit and computational cost. Hence for practical scenarios in real-time, a simple hand-crafted feature-based tracking scheme is a better choice [
5].
In a broader sense, hand-crafted feature-based tracking schemes consist of two main branches, i.e., generative and discriminative [
6]. In generative visual object tracking schemes, the appearance of the target model is represented by learning a model, and then object appearance most closely related to the target model is searched, e.g., [
7,
8,
9]. In contrast, discriminative approaches are designed to discriminate the target object from its background. As per the literature, discriminative methods are superior in terms of accuracy and computational cost. Some of the examples of these trackers are given in [
1,
10,
11,
12].
In this study, we propose a kernelized correlation filter-based tracking scheme to enhance the tracking efficiency in difficult scenarios. Our method detects the occlusion by considering multiple cues from the correlation response maps. Furthermore, we also use these cues to handle the occlusion. Adaptive learning rate strategy based on average peak correlation energy (APCE) is incorporated in the proposed tracking scheme to prevent the corrupted model, which ultimately handles the drift problem. Furthermore, this APCE is used in the scale search strategy to handle the scale variations in the incoming video frames.
The further organization of the paper is as follows.
Section 2 describes the closely related work to the proposed methodology.
Section 3 explains the proposed methodology.
Section 4 consists of the experimental setup for the proposed methodology. Furthermore, this section also explains the performance measures used to evaluate the tracker, whereas
Section 5 contains the analysis of results. At last,
Section 6 concludes the study.
2. Related Work
Many tracking schemes have been proposed to address the challenges such as deformation, occlusion, scale variation, illumination changes, etc. [
13,
14,
15], but correlation filter-based tracking is still a better choice because of its efficiency and less computation cost [
5].
A correlation filter (CF) generates the 2-D response map of the region of interest. Maps having higher correlation values are most likely to contain the target of interest. The initial correlation filter-based tracking proposed in [
16] became very famous. This tracker is based on the minimum output sum of squared error (MOSSE). It contributed to providing an adaptive online training strategy for appearance changes in the target, as there is always a tradeoff between performance and computational cost. The requirement of a large number of samples for training makes the correlation filter tracking method computationally expensive. A novel method called kernelized correlation filter (KCF) was proposed in [
17] to address this issue. In this method, all the input image/patch circularly shifted versions are used as training data. Interestingly, a single image is quiet enough to provide dense sampling to train the model in this method. Furthermore, the data matrix becomes circulant when we take the cyclically shifted versions as samples. Using the kernel trick over this data significantly decreases the computational cost. This method also gained the research community’s attention because of its exceptional performance in terms of accuracy and computational cost. In subsequent years, many improvements in KCF were proposed to address the challenging issues associated with real-time videos.
In [
18], the author proposed adaptive multi-scale correlation filter-based tracking to address the scale variation problem, which exists in the original KCF scheme. Another variant of the KCF-based tracker was presented in [
19] to address the partial occlusion problem. This tracker uses multiple correlation filters for different parts of the object. Long-term correlation tracking was proposed in [
20,
21] to address the target re-detection issue. These trackers use two different correlation filters for translation and scale estimation. They also handle the occlusion by redetecting the target after disappearance using the support vector machine (SVM) classifier. Recently, a kernelized correlation filter-based tracking scheme for large-scale variation was proposed in [
22]. This tracker uses a part-based scheme and divides the target into four parts. A motion-aware correlation filter tracking scheme is presented in [
23]. The author tried to incorporate the Kalman filter-based prediction algorithm in the discriminative correlation filter tracking method to prevent the model drift during challenging scenarios.
Scale-invariant feature transform is proposed in [
6]. It uses average peak correlation energy to update the scale of the target model. Due to wrong scale estimation, trackers start drifting from the actual target, and tracking failure occurs. Recent literature shows that researchers are continuously trying to handle tracking failure and redetecting the target after failure. Notable articles relevant to tracking failure detection and avoidance occlusion handling are presented in [
5,
24] and [
25,
26], respectively. Discriminative correlation filter trackers also suffer from boundary effects. To address this issue, a spatially regularized correlation filter-based tracking approach (SRDCF) is presented in [
27]. This approach shows promising results but at the cost of excess computational time, as it uses more images for training. In order to decrease the computational cost while keeping the promising performance, a spatial–temporal regularized correlation filter tracking scheme (STRCF) is proposed in [
28]. Another variant of SRDCF [
28] with multiple kernels is presented in [
29]. Collaboration of fractional Kalman with KCF is presented in [
30]. Similarly, a feature-based detector module in collaboration with the KCF tracker is proposed in [
31]. Researchers also applied KCF-based tracking schemes to non-RGB images. A KCF-based tracking scheme for infrared images is presented in [
32].
Despite a lot of successful research on discriminative correlation filter tracking, these trackers still need improvement to enhance their robustness under challenging scenarios. This study proposes a tracking scheme based on the kernelized correlation filter (KCF) method, which performs favorably under challenging scenarios. Our main contributions are listed below.
A design of an occlusion detection module based on the hybridization of average peak correlation energy (APCE) and confidence of squared response map (CSRM) is presented in this study.
It is shown that the peak correlation score alone is not good enough to detect heavy occlusion, motion blur, scale variation, background clutter, out-of-plane rotation, and deformation. We computed multiple cues from a single response map, including peak correlation, average peak correlation energy, peak-to-sidelobe ratio, and the confidence of the squared response map. Each cue gives different insights about the target of interest, which in turn helps in accurate occlusion detection and recovery of the target. Furthermore, an efficient scale handling strategy based on multiple cues for the state-of-the-art algorithm kernelized correlation filter is also presented in this study.
To prevent the target model from being perverted, we adjusted the learning rate as per the value of CSRM, i.e., we update the target model with a high learning rate when the CSRM is high and with a low learning rate when the CSRM value is low thus solving the drift problem in tracking.
Comprehensive evaluation and analysis of proposed algorithms with state-of-the-art methods on accepted datasets i.e., OTB-50 [
33], OTB-100 [
34], TC-128 [
35], is carried out.
3. The Proposed Tracking Framework
3.1. Kernelized Correlation Filter (KCF)
The tracking algorithm presented in [
1] builds on the MOSSE filter concept [
2] by extending the filter to non-linear correlation. Linear correlation between a CF template and a test image is the inner product of the template
w with a test sample
z for every possible shift of the test sample
z. Instead of computing the linear kernel function
at every shift of
z, KCF computes some non-linear kernel
κ(
w,
z) =
where
κ represents a kernel function that is equivalent to mapping
w and
z into a non-linear space with the lifting function ϕ(·).
In one sense, KCF can be viewed as a change away from linear correlation filters, but it can also be seen as an efficient way of solving and testing with kernel ridge regression when the training and testing data is structured in a particular way (i.e., a circulant matrix).
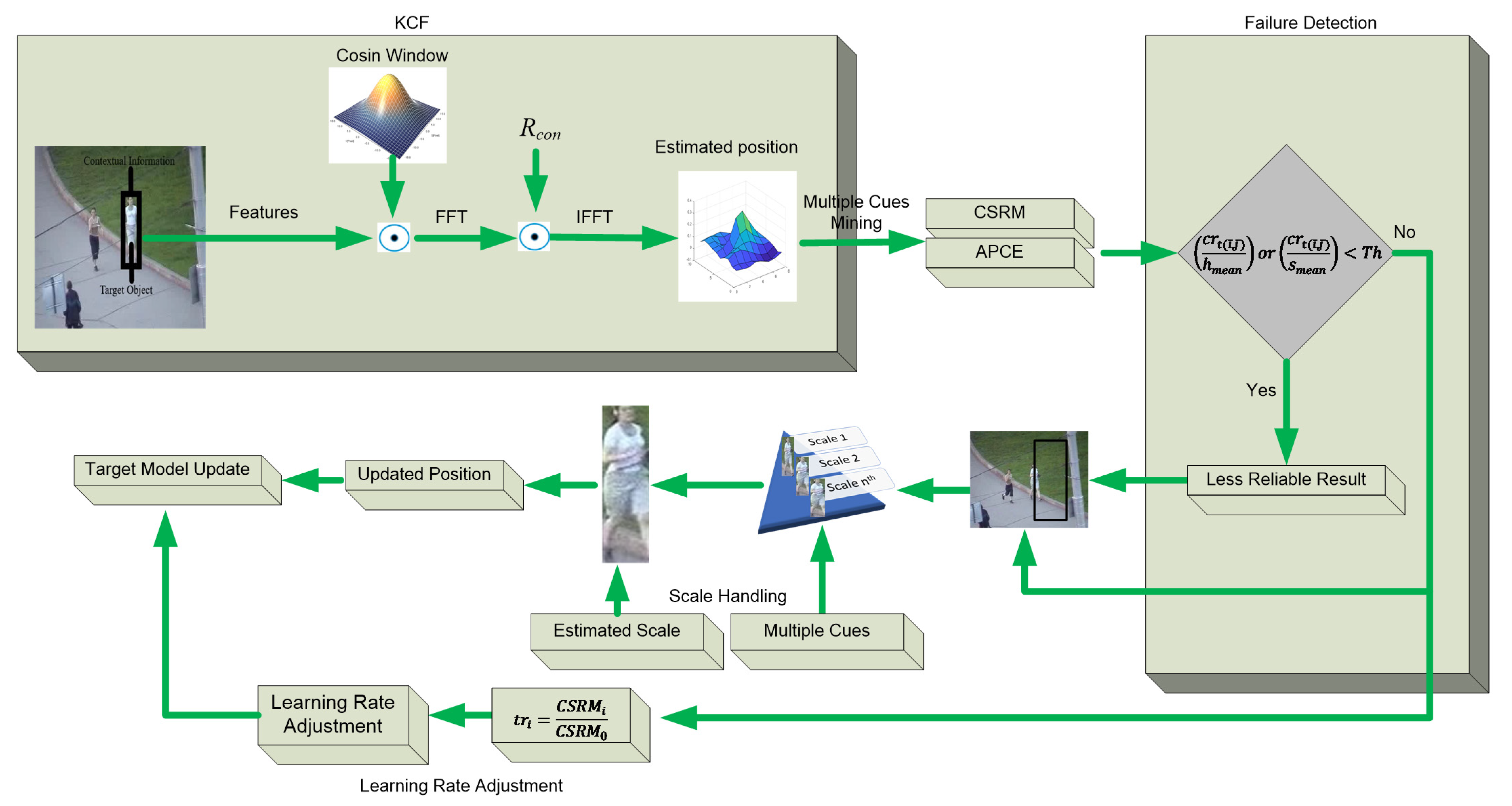
KCF module is presented at the top left corner of
Figure 1. Henriques et al. derive KCF from the standard solution of kernelized ridge regression. For learning
w, we assume the training data
is a
d ×
d matrix where
contains the same elements as
shifted by
k elements. The solution to kernelized ridge regression is given by [
3] as per Equation (1).
where
K is the kernel matrix such that
;
I is the identity matrix;
λ is the regularization parameter;
g is the desired correlation output; and α is the dual-space coefficient vector. The dual-space coefficients allow us to rewrite the original template
w in high-dimensional dual space as given in Equation (2).
where in terms of the dot product, the kernel function
=
κ(
) treats all data elements equally, and kernel K and the coefficients α can be computed efficiently in the Fourier domain as follows:
where
represents the first row of the kernel matrix
K, which contains the kernel function computation of
with all possible shifts of another data sample denoted
: either
in the training phase, or some test sample
z in the testing phase, and where hat
denotes the DFT of the vector.
3.2. Occlusion Handling Mechanism
The correlation response map gives multiple cues about the target in visual object tracking. For example, it contains the single distinguished peak in the case of simple sequences, while, in challenging sequences, like a blur in a video sequence or/and occlusion, the map contains multiple peaks nearly equal in height, i.e., peak value decreases whereas its adjacent values increase. Hence, target tracking failure can be predicted using this cue from the response map.
Consider the response map
, of size
for
, at
tth frame. The average correlation value of the
surrounding region around
is given by Equation (4).
APCE tells about the degree of fluctuation of the response map. If the object undergoes fast motion, the value of
APCE will be low.
APCE is calculated using Equation (5).
where,
and
denote the maximum and minimum values of the response map, respectively.
denotes the
row and
column element of response map. Now from the response map
is the coordinate where the
APCE value is highest, as per Equation (6).
Coordinates with the highest
APCE are obtained by searching for the response map. Different from [
5], which take the coordinates of peak correlation for further development, we use the coordinates with the highest APCE value, calculating the average and peak correlation values as
and
, respectively. By taking the mean over previous
frames, we can write it in the form of Equation (7).
whereas the mean of the surrounding region over previous
z frames is given by Equation (8).
These two values give insight into the tracking failure, i.e., if there is a distinct gap between the peak value and surrounding peaks, this means that tracking is correct, whereas, if there is a sharp drop in peak value and an increase in surrounding peaks simultaneously, this shows that it is difficult for the tracking algorithm to find the exact target, and most probably, tracking failure will occur. Mathematically, it is shown by a conditional expression, as given in Equation (9).
where
is set to be 0.6 [
4].
3.3. Adaptive Scale Handling Mechanism
A multi-resolution translation filter scheme is implemented for scale handling. Most algorithms, such as SAMF, use Maximum response value for scale searching. In turn, this degrades the performance of the overall tracking scheme when the video sequence contains one or more challenging factors, such as scale variation, occlusion, motion blur, etc. [
5]. We use Equation (5) along with Equation (10) for scale handling. Thus, incorporating multiple cues to address the issue more effectively, i.e., for any scaled sample if
, only that scale is selected as the true scale of the target.
The fluctuation and peak value of the response map define the tracking reliability, i.e., the ideal response map contains the one sharp peak at the location of the target of interest and is nearly equal to zero at other locations. A sharper peak as compared to other values of the response map ensures higher localization accuracy. On the other side, when the video contains several challenging factors such as occlusion, motion blur, and scale variation, response map values will start fluctuating, and the APCE measure will decrease. Pictorial representation of scale handling strategy is shown in
Figure 2.
We trained a simple two-dimensional KCF filter for translation estimation. Instead of using a naïve maximum response value, we use a robust APCE measure to find the true object position. The correlation response map with the highest APCE using Equation (6) is considered to be true object location. Then the multiple sub-windows around the estimated location are sampled. These windows are obtained by multiplying the previous target window with different scale factors. The sub-window with the highest APCE value is considered the correct scale estimation of the object. Fine-tuning is applied to the previous translation estimation after getting the exact scale of the object.
3.4. Adaptive Learning Rate
Maximum response value has been used widely as a reliability measure in tracking algorithms. During occlusion, motion blur, etc., the response map changes drastically. So, using only the maximum response value as a reliability measure to detect the occlusion is not good enough. Another measure, i.e., average peak correlation energy (APCE), is presented in [
6] given Equation (5).
It has been shown practically that if the target apparently appears in the detection scope, there will be a sharper peak in the response map, and the value of APCE will be smaller. However, if the target is occluded, the peak in the response map will be smoother, and the relative value of APCE becomes larger [
7]. This problem is solved by squaring the response map and then finding the confidence of the squared response map [
7]. The peak of the response map is represented in the nominator of Equation (10). At the same time, the denominator represents the mean square value of the response map. It is shown in
Figure 1 that the input to the adaptive learning rate block is coming from the response map, i.e., we are adjusting the learning rate by fetching multiple cues from the response map. The confidence of squared response map is given by Equation (10).
where
and
denote the maximum and minimum values of the response map, respectively.
denotes the
rth row and
cth column element of the response map.
M∗N is the dimension of the response map.
We increased the robustness of the reliability measure by considering both APCE and CSRM. First, we calculated the response using the robust APCE measure different from the MKCF [
5] algorithm, which selects the response using a naïve maximum correlation value. After selecting the response with correct scale estimation, CSRM is employed to adjust the learning rate. The conditional expression given by Equation (11) is used to adjust the learning rate.
where
is the value of squared response map in
frame while
is the values of the most confident result, i.e., the result of the first frame,
, is the learning rate for
frame.
4. Experiments
The proposed tracker is evaluated using both qualitative and quantitative results. A large number of experiments are performed on selected videos. Twenty-three videos were selected from three standard datasets, i.e., OTB-50 [
8], OTB-100 [
9], and Temple Colour-128 [
10]. Visual challenges such as occlusion, out-of-plane rotation, cluttering, scale changing, deformation, fast motion and motion blur, etc. associated with these videos are presented in
Table 1.
Evaluation Criteria
A comprehensive comparison of the proposed tracker with other latest state-of-the-art algorithms is based on three evaluation criterions, i.e., distance precision (DP), mean center location error (CLE), and overlap success rate (OSR) [
11], is presented in this paper. Distance precision is defined as the distance in terms of pixels between the ground truth and estimated position. As a standard practice, it is calculated at a threshold of 20 pixels, whereas
CLE is defined as the Euclidean distance calculated between the tracker and the ground truth of the target. Mathematically,
CLE is given by Equation (12).
where (
) are positions calculated by tracking algorithm, and (
) are ground truth values. The overlap success rate is defined as the area between the ground truth box and the estimated position box. Equation (13) shows the overlapping area between two boxes.
where
Ae is the area of the estimated bounding box, and
Ag is the area of the ground truth bounding box. The numerator of Equation (13) is the intersection of two areas, whereas the denominator is the union of two bounding boxes. This overlap success rate is calculated at a threshold of 0.5. The number of frames having an overlap area greater than the threshold of 0.5 divided by the total number of frames gives an overlap success rate.
The proposed method is implemented in MATLAB (2019) on an Intel Core i7, 7th generation, 2.80 GHz processor, RAM 16 GB, a machine with a 64-bit Windows 10 operating system.
5. Results
Our proposed tracking scheme is compared and evaluated on a number of videos from three different benchmark datasets, i.e., OTB-50 [
32], OTB100 [
33], and TC-128 [
34]. OTB 50 contains 50 videos. OTB-100 [
33] contains 100 different challenging videos. Each video has one or more visual challenges, such as clutter, deformation, out-of-plane rotation, occlusion, motion blur, etc., associated with it. TC-128 [
34] contains 128 challenging videos. Out of these 128 videos, 78 videos are new, and others are repeated in other datasets. We have selected 23 mixed sequences from these three datasets. Selected videos have eleven challenging attributes, namely (i) occlusion, (ii) scale variation, (iii) motion blur, (iv) fast motion, (v) out-of-plane rotation, (vi) deformation, (vii) background, (viii) in-plane rotation, (ix) intensity variation, (x) low resolution, and (xi) out-of-view movement to support and evaluate our proposed tracker. An explanation of each attribute is given in
Table 2.
5.1. Quantitative Analysis
To evaluate the performance of the proposed tracker quantitatively, three performance measures were used, i.e., distance precision, overlap threshold, and center error location. Comparison based on distance precision is given in
Table 3. A center location error comparison is given in
Table 4, whereas an overlap success rate comparison is given in
Table 5. Let us discuss the performance of the proposed tracker in comparison with other selected state-of-the-art algorithms based on each performance measure.
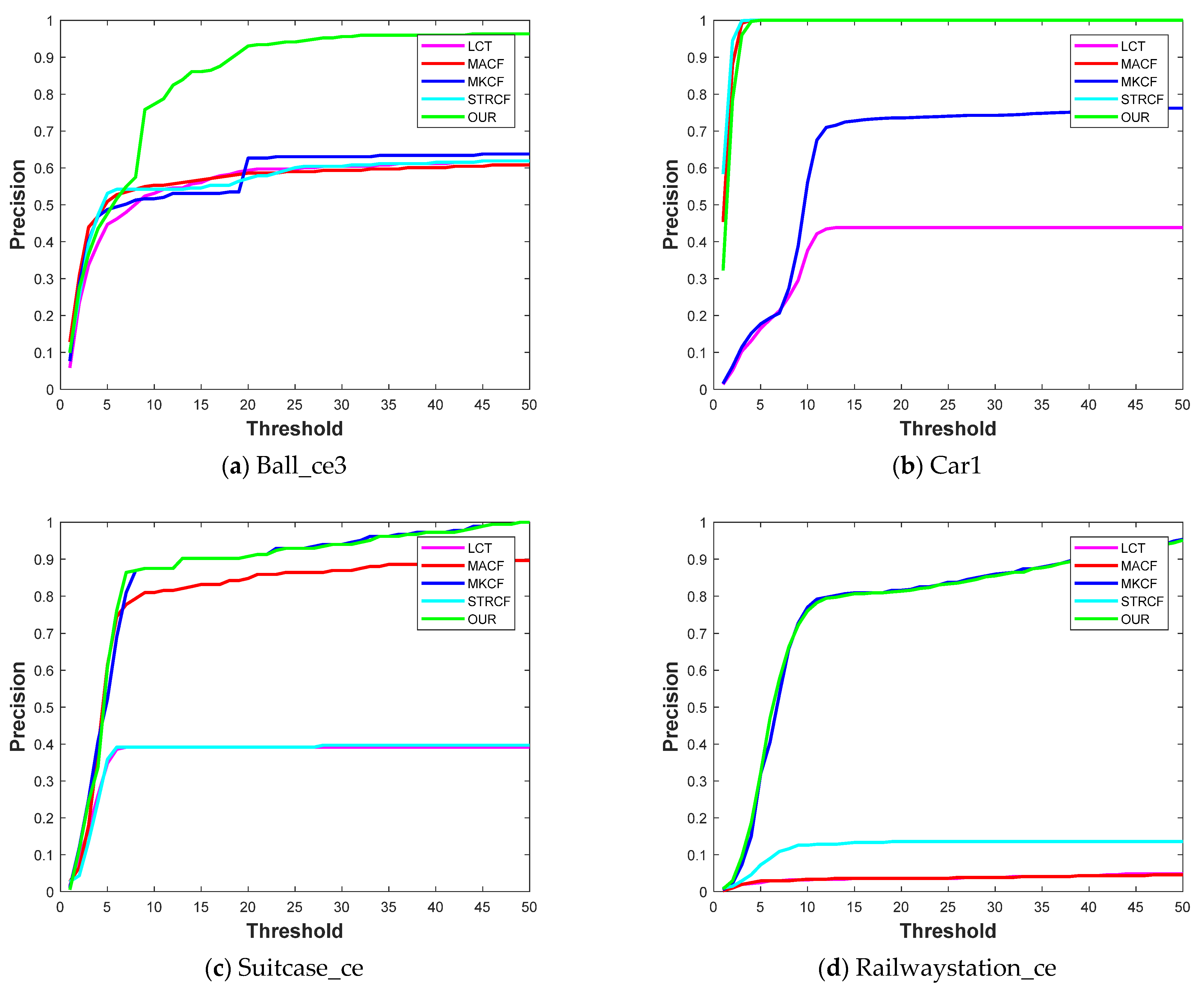
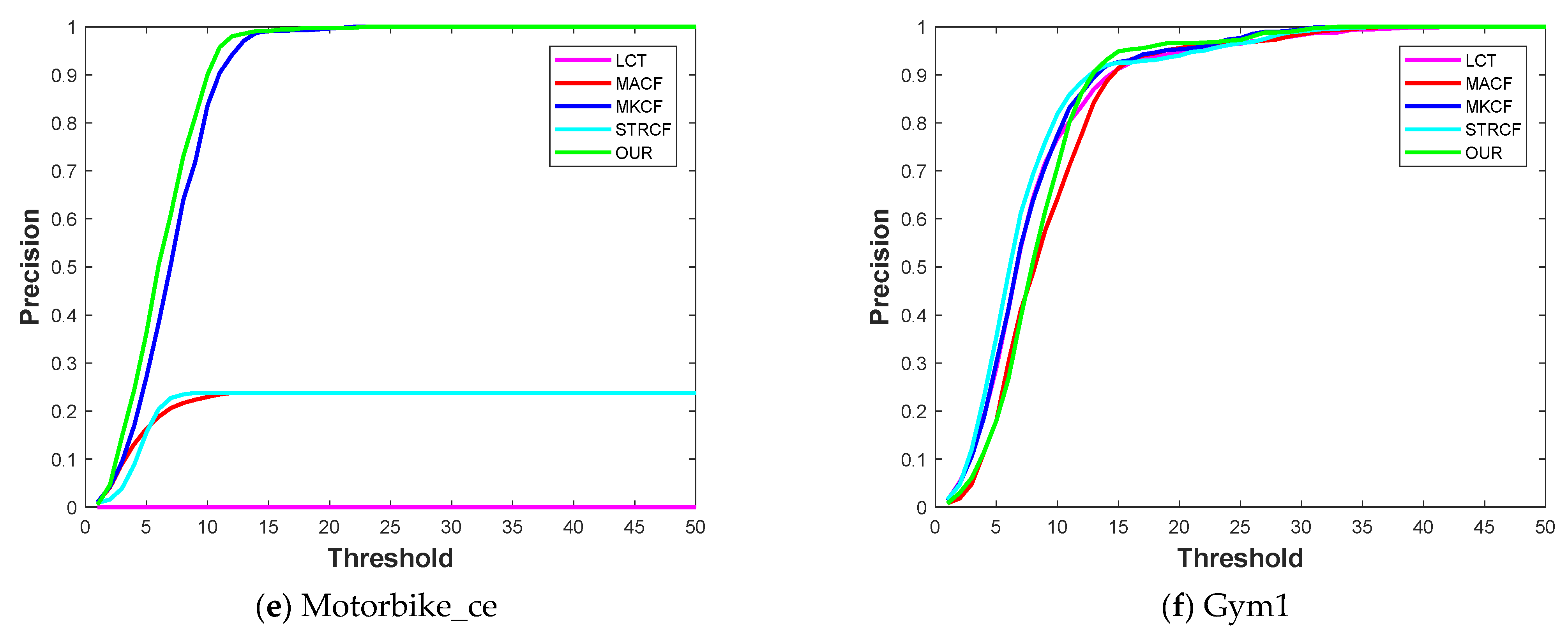
Table 3 shows the mean distance precision at the threshold of 20 pixels of the proposed method, LCT [
21], MACF [
23], MKCF [
5], and STRCF [
28]. The proposed tracking scheme outperforms the other state-of-the-art algorithms by achieving the highest mean of 0.889. The second-best in terms of distance precision is MKCF [
5], with a mean value of 0.855, whereas the third best is MACF [
23], having a mean value of 0.804. A complete distance precision plot for each video is also given in
Figure 3. The three most complex challenges, i.e., out-of-view movement, scale variation, and fast motion, are associated with Ball_ce3 video, and our proposed tracker achieved the highest distance precision value of 0.93 on this video sequence. A similarly proposed tracker also shows better performance for an on-suite case and gym 1 video sequences. It can be seen from
Figure 3 that videos have fewer associated challenges; all the tackers have equal performance in terms of distance precision.
This paragraph explains the overlap success rate comparison. This comparison is given in
Table 5. The last row shows the mean overlap success rate of 23 selected video sequences. Our proposed tracker achieved the highest mean overlap success rate of 0.824. In contrast, MACF [
23] is second-best with a small difference of 0.002, while the remaining three trackers, i.e., STRCF [
28], LCT [
21], and MKCF [
5], have a mean overlap success rate of 0.799, 0.717, and 0.645, respectively. It is noted that video sequences charchasing_ce1, Dudek, and electricalbike_ce contain severe occlusions. Our proposed tracker showed considerable performance on these sequences as per
Table 5.
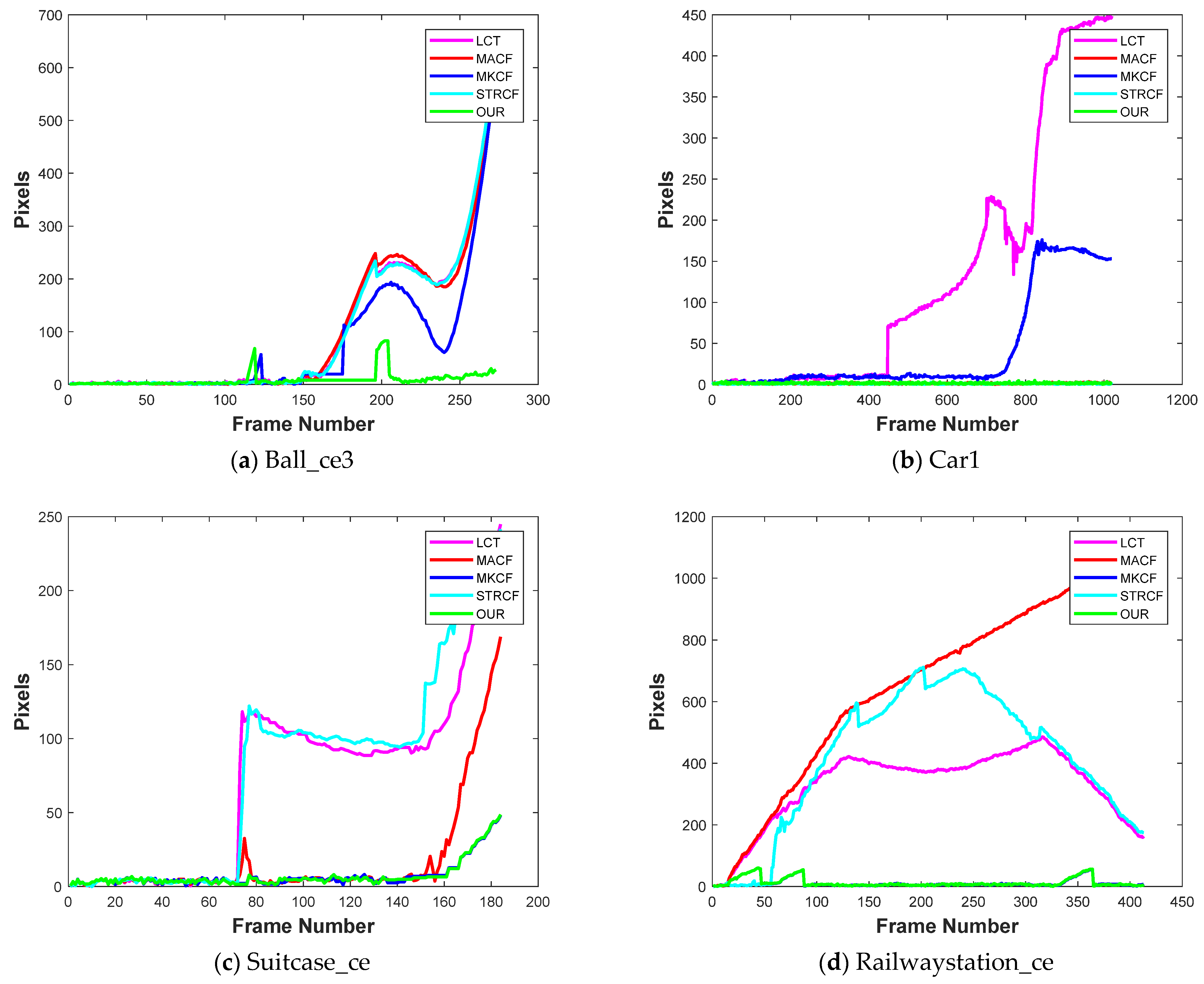
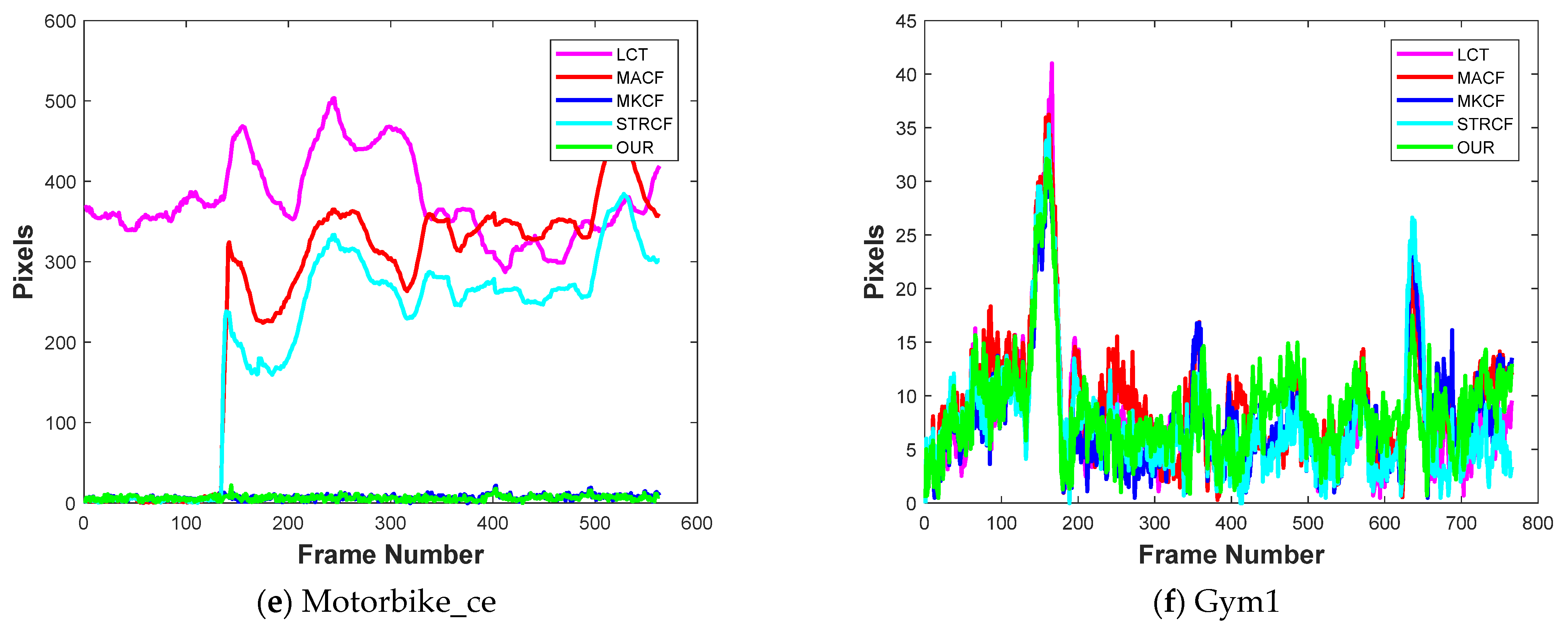
This paragraph will discuss the center location error comparison of the proposed tracker with the other four state-of-the-art algorithms. The last row of
Table 4 shows the mean center location error of the proposed tracker, LCT [
21], MACF [
23], MKCF [
5], and STRCF [
28]. Our proposed tracker outperformed by achieving a mean error of 16.06. Furthermore, there is a huge gap between the second-best and our proposed tracker. The STRCF [
28] scheme achieved the mean center location error of 44.89, whereas the third-best, i.e., MACF [
23], achieved the mean error of 53.94 pixels. LCT [
21] and MKCF [
5] showed similar performance in terms of center location error by achieving 70.797 and 79.782 values, respectively. The Center location error plot of each video is also given in
Figure 4. To avoid the overcrowding of plots in the paper, only six videos were selected for plots, but the error of each of the 23 videos is available in
Table 4.
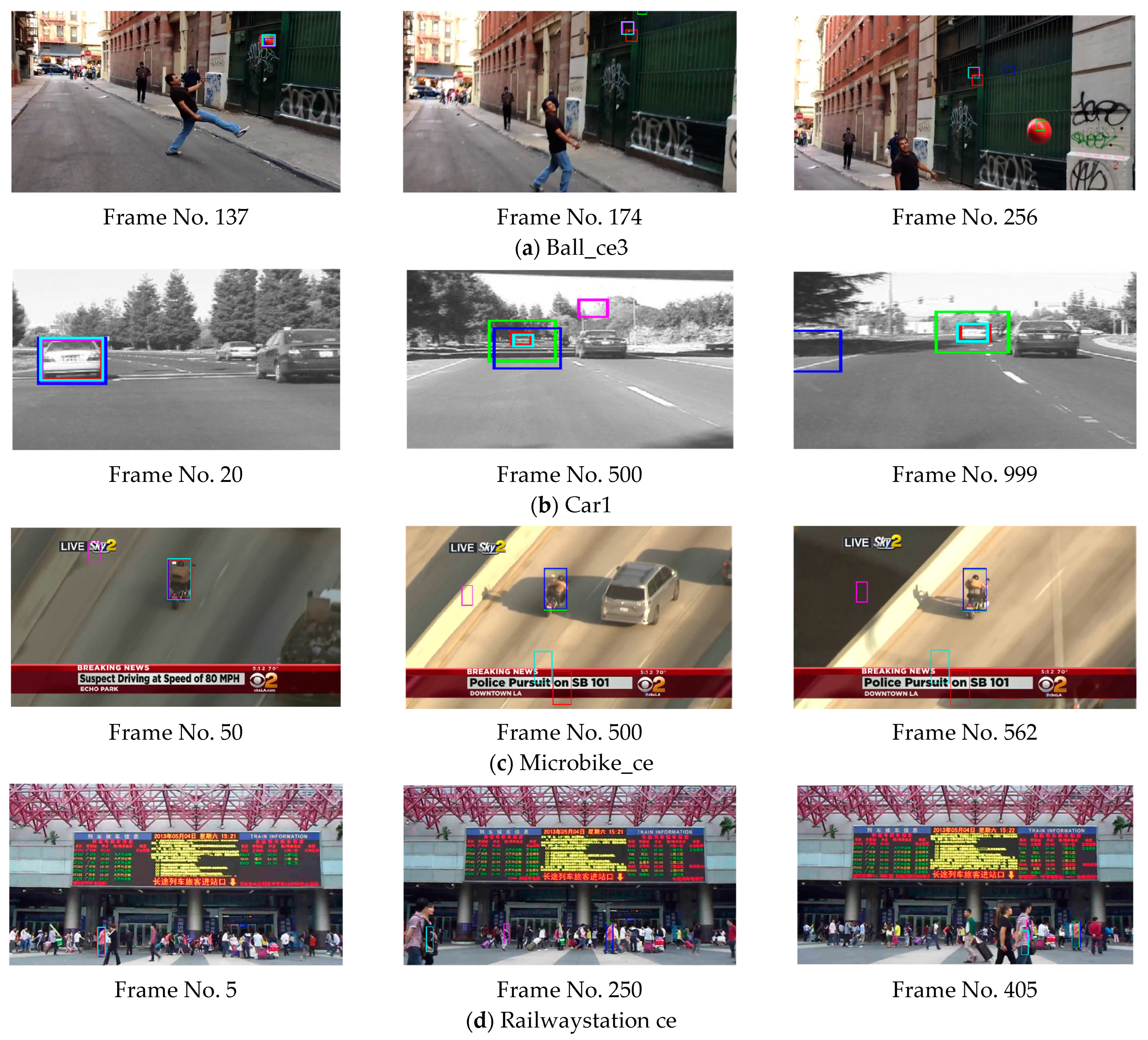
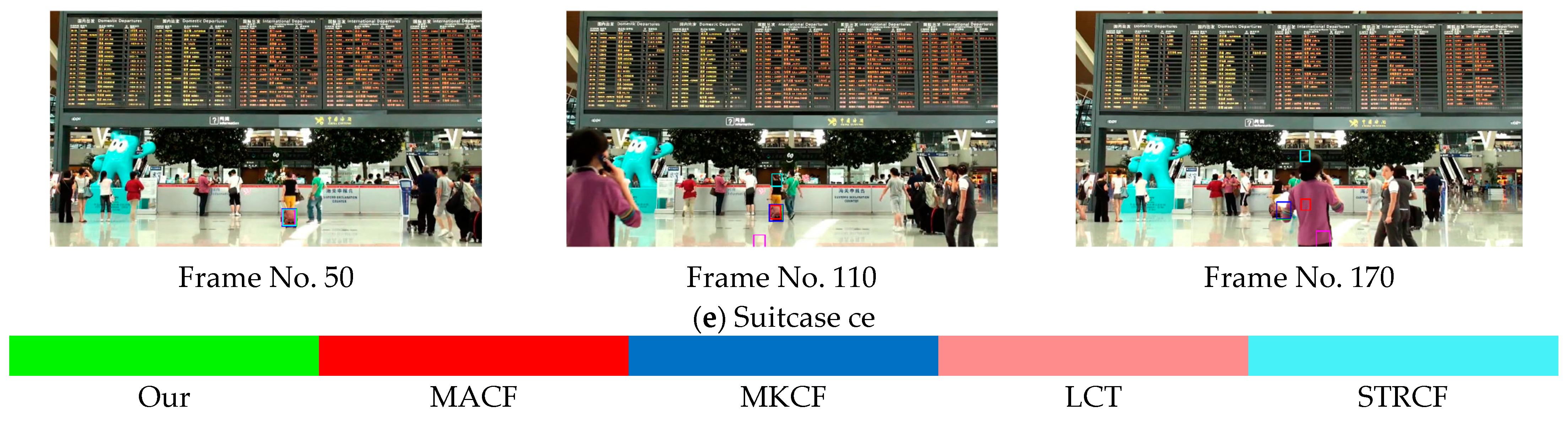
5.2. Qualitative Analysis
To evaluate and support our proposed tracker, the qualitative analysis is given in this section. For the qualitative analysis, the results of five trackers, i.e., our proposed, MKCF [
5], MACF [
23], STRCF [
28], and LCT [
21], over five video sequences are presented in
Figure 5. Three frames of each video are shown in
Figure 5. The top to bottom rows of
Figure 5 contains the ball_ce3, car1, microbike_ce, railwaystation_ce, and suitcase_ce video sequences. In the first row of
Figure 5, all the trackers successfully track the target until frame number 137. In frame number 174, the object of interest i.e., the ball is out of view of the tracker; hence, all the trackers have a bounding box at some wrong position. In frame number 256, the object again came back into view. In this frame, the proposed tracker is the only one to track the ball correctly. The green bounding box can be seen in the third column of the first row of
Figure 5.
This is a very challenging issue, for the object-tracking community to track an object when it comes back into view after out-of-view movement. Our proposed tracker successfully handled this situation. In the second row of
Figure 5, the car1 sequence is shown. All the trackers successfully track the target up until frame number 20. LCT [
21] lost the target in frame number 500, whereas MKCF [
5] lost the target in frame number 999.
Our proposed tracker, along with MACF [
23] and STRCF [
28], tracks the target successfully until the end of the video sequence. The third row of
Figure 5 represents the microbike_ce video sequence.
In this sequence, LCT [
21] fails at the start of the video sequence, which can be seen in frame number 50. While STRCF [
28] and MACF [
23] fail to track the object in frame number 500, our proposed tracker tracks the target correctly until the end of the video sequence. The fourth row of
Figure 5 shows the railwaystation_ce video sequence. This sequence contains the clutter background, in-plane rotation, and occlusion. Our proposed tracker successfully handles the challenges associated with this video sequence and tracks the object successfully, as shown in frames number 5250 and 405. MKCF [
5] also shows similar performance on this sequence, whereas all other tracker schemes fail to track the object.
The last row shows the suitcase_ce sequence from the Colour-128 dataset. The object to track in this sequence is a suitcase held in the hand of the girl. This sequence contains the clutter background, intensity variation, and occlusion. In this sequence, again the proposed tracker achieves a better result by tracking the target successfully even after the occlusion. MKCF [
5] showed a similar performance to our proposed algorithm on this sequence, whereas MACF [
23], STRCF [
28], and LCT [
21] were unable to track the correct object.
6. Conclusions
Most of the tracking algorithms use a single cue fetched from the response map for the training and detection phase of the filter. Like other tracking methods, our baseline tracker KCF also uses a single cue from the response map, such as peak correlation or peak to sidelobe ratio. This single cue could not give much insight into the tracking result, which causes the algorithm to suffer in challenging scenarios such as scale variation, occlusion, illumination variation, and motion blur. Similarly, simple KCF cannot detect the reliability of tracking results, which causes a drift problem. In the proposed tracking methodology, different cues such as average peak correlation energy, the confidence of squared response map, peak correlation value, and, last but not least, novel differences of peak correlation from single response map are used to handle the challenging issues of video sequences.
A comparison of the proposed scheme with four other state-of-the-art algorithms is presented. For a fair comparison, twenty-three different video sequences are selected from three standard visual object tracking datasets, i.e., OTB-50, OTB-100, and TC-128. The proposed tracking scheme shows favorable quantitative as well as qualitative results. For all three performance measures, our method achieved the highest accuracy.
Response map computation is a mandatory step for correlation filter-based tracking schemes. Tracking efficiency may be further enhanced without a significant increase in computation cost with the help of multiple cues mined from the response map. Furthermore, multiple cues also give better insight into the target/tracking result.
Author Contributions
Conceptualization, B.K., A.J. and A.A.; methodology, B.K., A.J. and A.A.; software, B.K., K.M. and K.M.C.; validation, K.M., K.M.C. and M.M.; formal analysis, B.K., K.M. and K.M.C.; investigation, B.K., K.M.C. and M.M.; resources, K.A., A.M.E.-S. and K.M.C.; writing—original draft preparation, B.K. and K.M.C.; writing—review and editing, K.M. and M.M.; visualization, H.T., A.J., A.A. and K.M.C.; supervision, A.J. and A.A.; project administration, K.A., A.M.E.-S., K.M.C. and H.T.; funding acquisition, K.A., A.M.E.-S., H.T. and K.M.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors extend their appreciation to King Saud University for funding this work through the Researcher Support Project number (RSP-2021/133), King Saud University, Riyadh, Saudi Arabia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the circulant structure of tracking-by-detection with kernels. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2012; Volume 7575 LNCS, pp. 702–715. [Google Scholar] [CrossRef]
- Kim, Y.; Park, H.; Paik, J. Robust Kernelized Correlation Filter using Adaptive Feature Weight TT. IEIE Trans. Smart Process. Comput. 2018, 7, 433–439. [Google Scholar] [CrossRef]
- Chen, K.; Tao, W. Once for All: A Two-Flow Convolutional Neural Network for Visual Tracking. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 3377–3386. [Google Scholar] [CrossRef] [Green Version]
- Hadfield, S.J.; Lebeda, K.; Bowden, R. The visual object tracking VOT2014 challenge results. In Proceedings of the European Conference on Computer Vision (ECCV) Visual Object Tracking Challenge Workshop, Zurich, Switzerland, 6 September 2014. [Google Scholar]
- Shin, J.; Kim, H.; Kim, D.; Paik, J. Fast and Robust Object Tracking Using Tracking Failure Detection in Kernelized Correlation Filter. Appl. Sci. 2020, 10, 713. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.; Acton, S.T.; Lin, Z. SITUP: Scale Invariant Tracking Using Average Peak-to-Correlation Energy. IEEE Trans. Image Process. 2020, 29, 3546–3557. [Google Scholar] [CrossRef] [Green Version]
- Ross, D.A.; Lim, J.; Lin, R.-S.; Yang, M.-H. Incremental Learning for Robust Visual Tracking. Int. J. Comput. Vis. 2008, 77, 125–141. [Google Scholar] [CrossRef]
- Zhou, S.K.; Chellappa, R.; Moghaddam, B. Visual tracking and recognition using appearance-adaptive models in particle filters. IEEE Trans. Image Process. 2004, 13, 1491–1506. [Google Scholar] [CrossRef]
- Mei, X.; Ling, H. Robust visual tracking using ℓ1minimization. In Proceedings of the 2009 IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009; pp. 1436–1443. [Google Scholar] [CrossRef]
- Possegger, H.; Mauthner, T.; Bischof, H. In defense of color-based model-free tracking. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 2113–2120. [Google Scholar] [CrossRef]
- Hare, S.; Saffari, A.; Torr, P.H.S. Struck: Structured output tracking with kernels. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 263–270. [Google Scholar] [CrossRef] [Green Version]
- Tang, M.; Yu, B.; Zhang, F.; Wang, J. High-speed tracking with multi-kernel correlation filters. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar] [CrossRef] [Green Version]
- Babenko, B.; Yang, M.H.; Belongie, S. Robust object tracking with online multiple instance learning. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 1619–1632. [Google Scholar] [CrossRef] [Green Version]
- Zhong, W.; Lu, H.; Yang, M.-H. Robust object tracking via sparsity-based collaborative model. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1838–1845. [Google Scholar]
- Zhang, T.; Jia, K.; Xu, C.; Ma, Y.; Ahuja, N. Partial occlusion handling for visual tracking via robust part matching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1258–1265. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 37, 583–596. [Google Scholar] [CrossRef] [Green Version]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Discriminative Scale Space Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1561–1575. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Wang, G.; Yang, Q. Real-time part-based visual tracking via adaptive correlation filters. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 4902–4912. [Google Scholar] [CrossRef]
- Ma, C.; Yang, X.; Zhang, C.; Yang, M.H. Long-term correlation tracking. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5388–5396. [Google Scholar] [CrossRef]
- Ma, C.; Huang, J.-B.; Yang, X.; Yang, M.-H. Adaptive Correlation Filters with Long-Term and Short-Term Memory for Object Tracking. Int. J. Comput. Vis. 2018, 126, 771–796. [Google Scholar] [CrossRef] [Green Version]
- Lian, G. A novel real-time object tracking based on kernelized correlation filter with self-adaptive scale computation in combination with color attribution. J. Ambient Intell. Humaniz. Comput. 2020, 1–9. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Zhou, W.; Shi, L.; Li, D. Motion-Aware Correlation Filters for Online Visual Tracking. Sensors 2018, 18, 3937. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, B.; Ali, A.; Jalil, A.; Mehmood, K.; Murad, M.; Awan, H. AFAM-PEC: Adaptive Failure Avoidance Tracking Mechanism Using Prediction-Estimation Collaboration. IEEE Access 2020, 8, 149077–149092. [Google Scholar] [CrossRef]
- Mehmood, K.; Jalil, A.; Ali, A.; Khan, B.; Murad, M.; Khan, W.U.; He, Y. Context-Aware and Occlusion Handling Mechanism for Online Visual Object Tracking. Electronics 2020, 10, 43. [Google Scholar] [CrossRef]
- Mehmood, K.; Jalil, A.; Ali, A.; Khan, B.; Murad, M.; Cheema, K.; Milyani, A. Spatio-Temporal Context, Correlation Filter and Measurement Estimation Collaboration Based Visual Object Tracking. Sensors 2021, 21, 2841. [Google Scholar] [CrossRef]
- Gao, L.; Li, Y.; Ning, J. Improved kernelized correlation filter tracking by using spatial regularization. J. Vis. Commun. Image Represent. 2018, 50, 74–82. [Google Scholar] [CrossRef]
- Li, F.; Tian, C.; Zuo, W.; Zhang, L.; Yang, M.-H. Learning spatial-temporal regularized correlation filters for visual tracking. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Su, Z.; Li, J.; Chang, J.; Song, C.; Xiao, Y.; Wan, J. Learning spatial-temporally regularized complementary kernelized correlation filters for visual tracking. Multimed. Tools Appl. 2020, 79, 25171–25188. [Google Scholar] [CrossRef]
- Mehmood, K.; Ali, A.; Jalil, A.; Khan, B.; Cheema, K.M.; Murad, M.; Milyani, A.H. Efficient Online Object Tracking Scheme for Challenging Scenarios. Sensors 2021, 21, 8481. [Google Scholar] [CrossRef]
- Tseng, D.-C.; Chen, C.-H.; Chen, Y.-M. Autonomous Tracking by an Adaptable Scaled KCF Algorithm. Int. J. Mach. Learn. Comput. 2021, 11, 48–54. [Google Scholar] [CrossRef]
- Yang, X.; Li, S.; Yu, J.; Zhang, K.; Yang, J.; Yan, J. GF-KCF: Aerial infrared target tracking algorithm based on kernel correlation filters under complex interference environment. Infrared Phys. Technol. 2021, 119, 103958. [Google Scholar] [CrossRef]
- Wu, Y.; Lim, J.; Yang, M.-H. Online object tracking: A benchmark. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M.-H. Object Tracking Benchmark. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1834–1848. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liang, P.; Blasch, E.; Ling, H. Encoding Color Information for Visual Tracking: Algorithms and Benchmark. IEEE Trans. Image Process. 2015, 24, 5630–5644. [Google Scholar] [CrossRef] [PubMed]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}