
A 28 nm Bulk CMOS Fully Digital BPSK Demodulator for US-Powered IMDs Downlink Communications



Abstract
:1. Introduction
2. US-Powered IMDs: A System Overview
3. Characterization of the US Data Link
4. The Proposed Fully Digital BPSK Demodulator
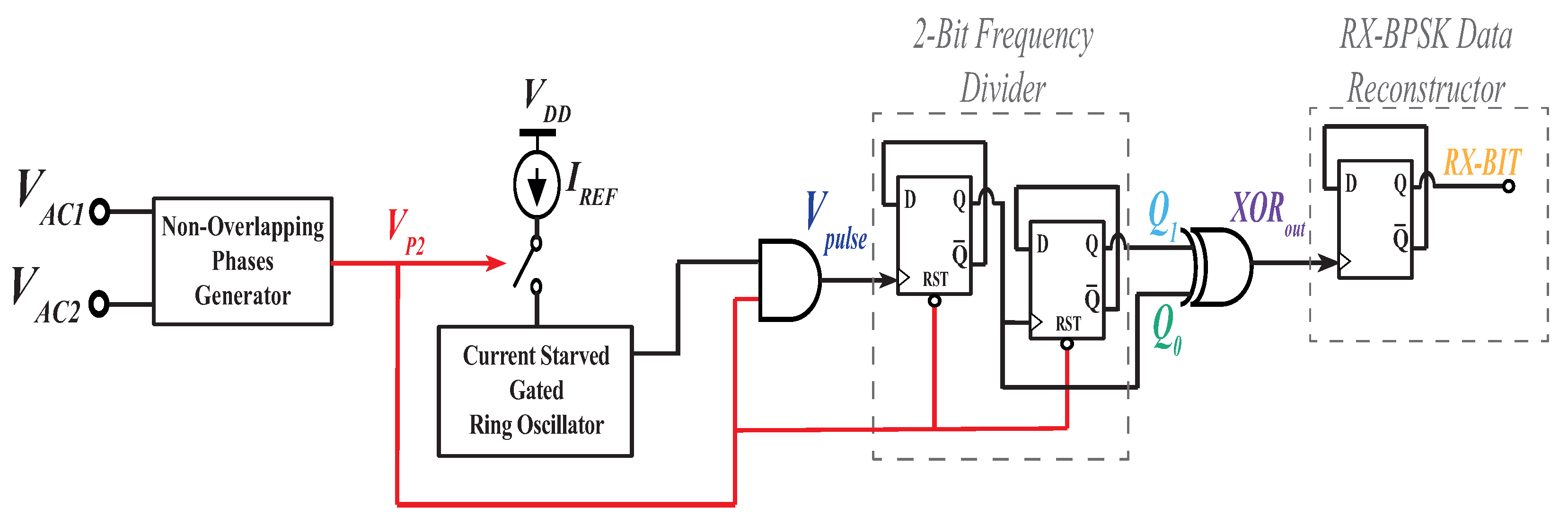
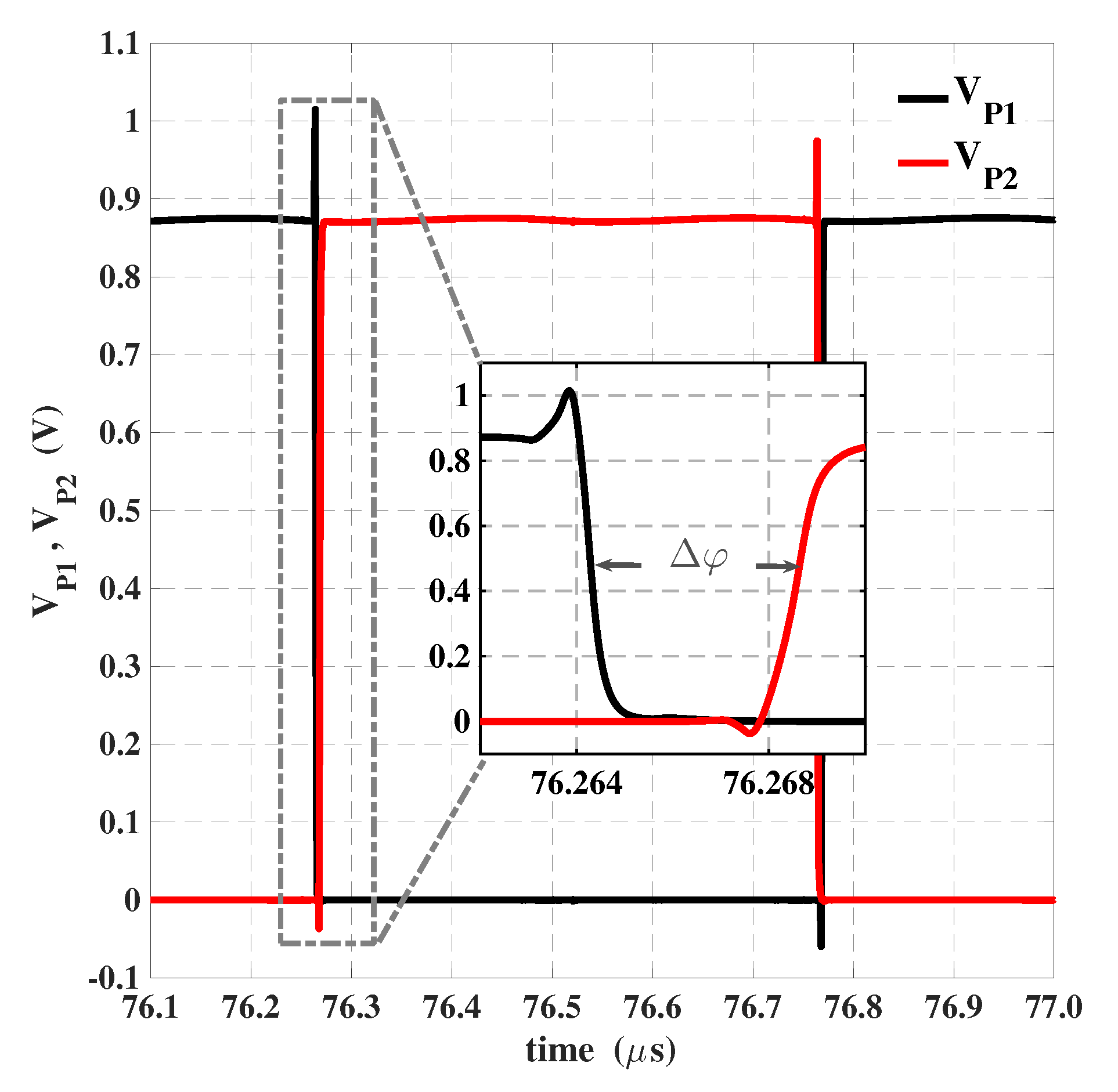
- The two input sinusoidal waves that come out from the RX-PIEZO are firstly clamped out, and, consequently, they degenerate two semi-square waveform signals, namely V, in Figure 6. When the phase modulation occurs, one of the two phases will present a doubled time duration. In this paper, just the negative sine phase, , is taken into account as the incoming modulation signal is high (i.e., MOD in Equation (1) is high).
- A non-overlapping phase generator is strongly required, since it allows to better separate and distinguish, from a temporal point of view, the two clamped-sine incoming phases and to detect the bit-start/end signals. Moreover, its output, , is the resulting modulating phase.
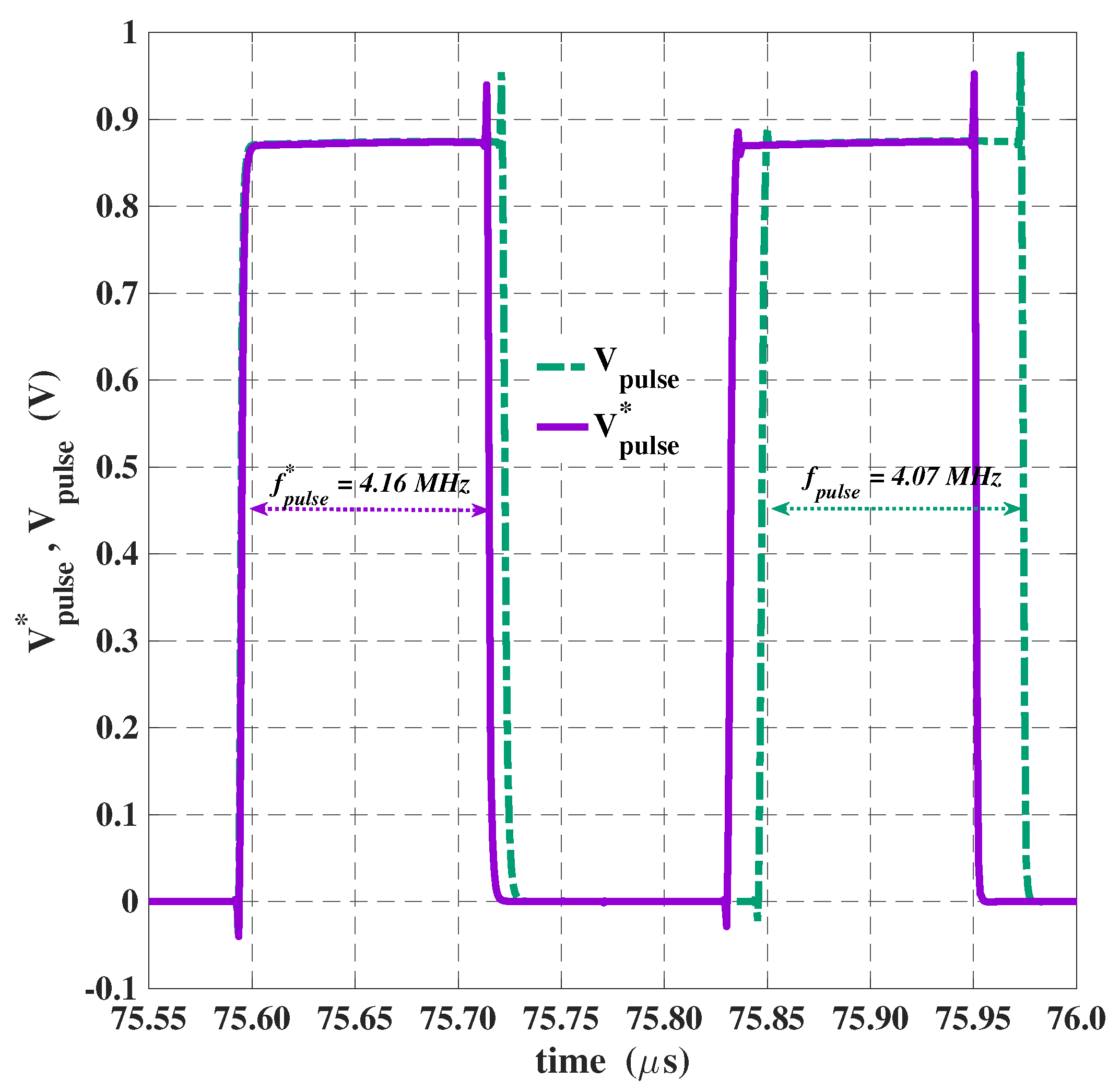
- A current-starved ring oscillator starts oscillating just when the enabling phase () is high.
- The core of the proposed demodulator is constituted by a 2-bit frequency divider and a CMOS XOR gate which allows to count the number of pulses generated by the ring oscillator, when enabled by . Briefly, the changes in the output bit state happen when a doubling on the number of pulses of the oscillator occurs (i.e., two clock pulses are generated when MOD goes high and, vice-versa, a single clock pulse when no modulation occurs). In such event, the two output states and will present different time durations, and this difference will be detected by the XOR gate.
- The pulses generated by the XOR gate, , which are slightly delayed as indicated in Figure 7, allows the reconstruction of the bit ‘1’ from the modulator. It must be noted that the time delay is symmetric and equal for both the rising and falling edges of the received bit and, therefore, the time delay does not affect the demodulated data.
4.1. Non-Overlapping Phases Generator
4.2. Current-Starved Gated Ring Oscillator (CSGRO)
4.3. D-Flip-Flops (DFFs) and XOR Gate
5. Simulations of the Proposed Fully Digital BPSK Demodulator
5.1. Post-Layout Simulations and Performance Parameters
5.2. Comparison with the State-of-the-Art
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Benabid, A.L.; Chabardes, S.; Mitrofanis, J.; Pollak, P. Deep brain stimulation of the subthalamic nucleus for the treatment of Parkinson’s disease. Lancet Neurol. 2009, 8, 67–81. [Google Scholar] [CrossRef]
- Jochumsen, M.; Navid, M.S.; Rashid, U.; Haavik, H.; Niazi, I.K. EMG- Versus EEG-Triggered Electrical Stimulation for Inducing Corticospinal Plasticity. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1901–1908. [Google Scholar] [CrossRef] [PubMed]
- Raspopovic, S.; Capogrosso, M.; Petrini, F.M.; Bonizzato, M.; Rigosa, J.; Pino, G.D.; Carpaneto, J.; Controzzi, M.; Boretius, T.; Fernandez, E.; et al. Restoring Natural Sensory Feedback in Real-Time Bidirectional Hand Prostheses; American Association for the Advancement of Science: Washington, DC, USA, 2014. [Google Scholar] [CrossRef]
- Rubinstein, J.T. Paediatric cochlear implantation: Prosthetic hearing and language development. Lancet 2002, 360, 483–485. [Google Scholar] [CrossRef]
- Aquilina, O. A brief history of cardiac pacing. Images Paediatr. Cardiol. 2006, 8, 17–81. [Google Scholar]
- Barbruni, G.L.; Ros, P.M.; Demarchi, D.; Carrara, S.; Ghezzi, D. Miniaturised Wireless Power Transfer Systems for Neurostimulation: A Review. IEEE Trans. Biomed. Circuits Syst. 2020, 14, 1160–1178. [Google Scholar] [CrossRef]
- Arbabian, A.; Chang, T.C.; Wang, M.L.; Charthad, J.; Baltsavias, S.; Fallahpour, M.; Weber, M.J. Sound Technologies, Sound Bodies: Medical Implants with Ultrasonic Links. IEEE Microw. Mag. 2016, 17, 39–54. [Google Scholar] [CrossRef]
- Javan-Khoshkholgh, A.; Farajidavar, A. Simultaneous Wireless Power and Data Transfer: Methods to Design Robust Medical Implants for Gastrointestinal Tract. IEEE J. Electromagn. RF Microw. Med. Biol. 2021, 6, 3–15. [Google Scholar] [CrossRef]
- Piech, D.K.; Johnson, B.C.; Shen, K.; Ghanbari, M.M.; Li, K.Y.; Neely, R.M.; Kay, J.E.; Carmena, J.M.; Maharbiz, M.M.; Muller, R. A wireless millimetre-scale implantable neural stimulator with ultrasonically powered bidirectional communication. Nat. Biomed. Eng. 2020, 4, 207–222. [Google Scholar] [CrossRef]
- Jaafar, B.; Neasham, J.A.; Degenaar, P. What is Ultrasound Can and Cannot Do in The Communication of Biomedical Implanted Medical Devices. IEEE Rev. Biomed. Eng. 2021. [Google Scholar] [CrossRef]
- Ballo, A.; Bottaro, M.; Grasso, A.D. A Review of Power Management Integrated Circuits for Ultrasound-Based Energy Harvesting in Implantable Medical Devices. Appl. Sci. 2021, 11, 2487. [Google Scholar] [CrossRef]
- Rathod, V.T. A Review of Electric Impedance Matching Techniques for Piezoelectric Sensors, Actuators and Transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef] [Green Version]
- Pal, S.; Ki, W.H. 40.68 MHz Digital On-Off Delay-Compensated Active Rectifier for WPT of Biomedical Applications. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3307–3311. [Google Scholar] [CrossRef]
- Ballo, A.; Grasso, A.D.; Privitera, M. An Efficient AC-DC Converter in 28nm Si-Bulk CMOS Technology for Piezo-Powered Medical Implanted Devices. In Proceedings of the 2021 IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Lansing, MI, USA, 9–11 August 2021; pp. 344–347. [Google Scholar] [CrossRef]
- Lin, J.; Wang, L.; Lu, Y.; Zhan, C. A Nano-Watt Dual-Output Subthreshold CMOS Voltage Reference. IEEE Open J. Circuits Syst. 2020, 1, 100–106. [Google Scholar] [CrossRef]
- Lu, Y.; Ki, W.-K. CMOS Integrated Circuit Design for Wireless Power Transfer; Analog Circuits and Signal Processing; Springer: Singapore, 2018. [Google Scholar]
- Kilinc, E.G.; Dehollain, C.; Maloberti, F. Remote Powering and Data Communication for Implanted Biomedical Systems; Analog Circuits and Signal Processing; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Feng, T.; Lajnef, N.; Chakrabartty, S. Design of a CMOS System-on-Chip for Passive, Near-Field Ultrasonic Energy Harvesting and Back-Telemetry. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2016, 24, 544–554. [Google Scholar] [CrossRef]
- Mazzilli, F.; Dehollain, C. 184 μW ultrasonic on–off keying/amplitude-shift keying demodulator for downlink communication in deep implanted medical devices. IET Electron. Lett. 2016, 52, 502–504. [Google Scholar] [CrossRef]
- Charthad, J.; Chang, T.C.; Liu, Z.; Sawaby, A.; Weber, M.J.; Baker, S.; Gore, F.; Felt, S.A.; Arbabian, A. A mm-Sized Wireless Implantable Device for Electrical Stimulation of Peripheral Nerves. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 257–270. [Google Scholar] [CrossRef]
- Sonmezoglu, S.; Fineman, J.R.; Maltepe, E.; Maharbiz, M.M. Monitoring deep-tissue oxygenation with a millimeter-scale ultrasonic implant. Nat. Biotechnol. 2021, 39, 855–864. [Google Scholar] [CrossRef]
- Berkol, G.; Baltus, P.G.M.; Harpe, P.J.A.; Cantatore, E. A -81.6 dBm Sensitivity Ultrasound Transceiver in 65 nm CMOS for Symmetrical Data-Links. In Proceedings of the ESSCIRC 2019—IEEE 45th European Solid State Circuits Conference (ESSCIRC), Cracow, Poland, 23–26 September 2019; pp. 145–148. [Google Scholar]
- Luo, Y.S.; Wang, J.R.; Huang, W.J.; Tsai, J.Y.; Liao, Y.F.; Tseng, W.T.; Yen, C.T.; Li, P.C.; Liu, S.I. Ultrasonic Power/Data Telemetry and Neural Stimulator With OOK-PM Signaling. IEEE Trans. Circuits Syst. II Express Briefs 2013, 60, 827–831. [Google Scholar] [CrossRef]
- Chang, T.C.; Wang, M.L.; Charthad, J.; Weber, M.J.; Arbabian, A. A 30.5 mm3 fully packaged implantable device with duplex ultrasonic data and power links achieving 95 kb/s with <10-4 BER at 8.5 cm depth. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; pp. 460–461. [Google Scholar] [CrossRef]
- Hu, Y.; Sawan, M. A fully integrated low-power BPSK demodulator for implantable medical devices. IEEE Trans. Circuits Syst. I Regul. Pap. 2005, 52, 2552–2562. [Google Scholar] [CrossRef]
- Asgarian, F.; Amir, M.S. A carrier-frequency-independent BPSK demodulator with 100 data-rate-to-carrier-frequency ratio. In Proceedings of the 2010 Biomedical Circuits and Systems Conference (BioCAS), Paphos, Cyprus, 3–5 November 2010; pp. 29–32. [Google Scholar] [CrossRef]
- Lee, S.Y.; Hong, J.H.; Hsieh, C.H.; Liang, M.C.; Kung, J.Y. A Low-Power 13.56 MHz RF Front-End Circuit for Implantable Biomedical Devices. IEEE Trans. Biomed. Circuits Syst. 2013, 7, 256–265. [Google Scholar] [CrossRef]
- Hosseinnejad, M.; Erfanian, A.; Karami, M.A. A fully digital BPSK demodulator for biomedical application. Microelectron. J. 2018, 81, 76–83. [Google Scholar] [CrossRef]
- Ghazi, M.; Maghami, M.H.; Amiri, P.; Hamedi-Hagh, S. An Ultra-Low-Power Area-Efficient Non-Coherent Binary Phase-Shift Keying Demodulator for Implantable Biomedical Microsystems. Electronics 2020, 9, 1123. [Google Scholar] [CrossRef]
- Garg, V.; Kandpal, K. Design of DQPSK Demodulator for Implantable Biomedical Devices. J. Circuits Syst. Comput. 2020, 29, 2020007. [Google Scholar] [CrossRef]
- Pan, L.; Chen, M.; Chen, Y.; Zhu, S.; Liu, Y. An Energy-Autonomous Power-and-Data Telemetry Circuit With Digital-Assisted-PLL-Based BPSK Demodulator for Implantable Flexible Electronics Applications. IEEE Open J. Circuits Syst. 2021, 2, 721–731. [Google Scholar] [CrossRef]
- Karimi, M.J.; Schmid, A.; Dehollain, C. Wireless Power and Data Transmission for Implanted Devices via Inductive Links: A Systematic Review. IEEE Sens. J. 2021, 21, 7145–7161. [Google Scholar] [CrossRef]
- Rahmadian, A. BER-Simulator. 2020. Available online: https://github.com/arif2ianto/BER-Simulator/blob/master/siskom2_BERsim.m (accessed on 10 January 2022).
- Alves, N.; Kim, A.; Tan, J.; Hwang, G.; Javed, T.; Neagu, B.; Courtney, B.K. Cardiac Tissue-Mimicking Ballistic Gel Phantom for Ultrasound Imaging in Clinical and Research Applications. Ultrasound Med. Biol. 2020, 46, 2057–2069. [Google Scholar] [CrossRef]
- Gao, W.; Liu, W.; Hu, Y.; Wang, J. Study of Ultrasonic Near-Field Region in Ultrasonic Liquid-Level Monitoring System. Micromachines 2020, 11, 763. [Google Scholar] [CrossRef]
- Best, R.E. Phase Locked Loops 6/e: Design, Simulation, and Applications, 6th ed.; McGraw Hill: New York, NY, USA, 2007. [Google Scholar]
- Rabaey, J.M. Digital Integrated Circuits: A Design Perspective; Prentice-Hall, Inc.: New York, NY, USA, 1996. [Google Scholar]
- Baker, R.J. CMOS: Circuit Design, Layout, and Simulation; IEEE Series on Microelectronic Systems; Wiley: Hoboken, NJ, USA, 2010; pp. 397–410. [Google Scholar] [CrossRef]
- Straayer, M.Z.; Perrott, M.H. A Multi-Path Gated Ring Oscillator TDC With First-Order Noise Shaping. IEEE J. Solid-State Circuits 2009, 44, 1089–1098. [Google Scholar] [CrossRef]
- Hwang, K.D.; Kim, L.S. An area efficient asynchronous gated ring oscillator TDC with minimum GRO stages. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010; pp. 3973–3976. [Google Scholar] [CrossRef]
- Yuan, J.; Svensson, C. High-speed CMOS circuit technique. IEEE J. Solid-State Circuits 1989, 24, 62–70. [Google Scholar] [CrossRef] [Green Version]
- Ndjountche, T. Data Converters, Phase-Locked Loops, and Their Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Navaii, M.L.; Jalali, M.; Sadjedi, H. A 34-pJ/bit Area-Efficient ASK Demodulator Based on Switching-Mode Signal Shaping. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 640–644. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transistor | Aspect Ratio [m/m] |
|---|---|
| 4.8/0.9 | |
| * | 0.32/0.6 |
| * | 0.96/0.6 |
| 0.32/0.6 | |
| 0.96/0.6 | |
| 0.64/0.6 | |
| 1.92/0.6 | |
| 9 × 1.0/0.4 |
| Corners @ , and °C | |||||
|---|---|---|---|---|---|
| Parameter | TT | FF | FS | SF | SS |
| (MHz) | 4.07 | 3.72 | 4.16 | 3.95 | 3.93 |
| (μW) | 1.0 | 1.37 | 1.0 | 1.0 | 0.87 |
| TSPC D-FF | XOR Gate | ||
|---|---|---|---|
| Transistor | Aspect Ratio [m/m] | Transistor | Aspect Ratio [m/m] |
| 0.32/0.9 | 0.64/0.6 | ||
| 0.64/0.9 | |||
| 0.32/0.45 | |||
| 1.92/0.9 | 1.92/0.6 | ||
| 0.96/0.9 | |||
| 0.96/0.45 | |||
| Corners @ , and | |||||
|---|---|---|---|---|---|
| Parameter | TT | FF | FS | SF | SS |
| 3.95 | 3.85 | 4.15 | 3.90 | 3.80 | |
| 97 | 102 | 85 | 114 | 131 | |
| 2.58 | 3.00 | 2.54 | 2.63 | 2.41 | |
| 1.94 | 2.25 | 1.91 | 1.97 | 1.81 | |
| Corners @ , and , body temperature | |||||
| Parameter | TT | FF | FS | SF | SS |
| 4.07 | 3.84 | 4.18 | 3.95 | 3.84 | |
| 95 | 105 | 82 | 112 | 128 | |
| 2.61 | 3.1 | 2.55 | 2.64 | 2.4 | |
| 1.96 | 2.33 | 1.92 | 1.98 | 1.80 | |
| Corners @ , and | |||||
| Parameter | TT | FF | FS | SF | SS |
| 4.1 | 3.72 | 4.2 | 3.95 | 4.1 | |
| 92 | 108 | 81 | 109 | 92 | |
| 2.64 | 3.3 | 2.64 | 2.67 | 2.43 | |
| 1.98 | 2.48 | 1.98 | 2.01 | 1.83 | |
| Corners @ , and | |||||
|---|---|---|---|---|---|
| Parameter | TT | FF | FS | SF | SS |
| (MHz) | 4.2 | 4.00 | 4.31 | 4.13 | 3.92 |
| (μW) | 1.3 | 1.44 | 1.27 | 1.25 | 1.15 |
| Parameter | [23] | [18] | [19] | [24] | [20] | [22] | [9] | [21] | This Work |
|---|---|---|---|---|---|---|---|---|---|
| Year | 2013 | 2016 | 2016 | 2017 | 2018 | 2019 | 2020 | 2021 | 2022 |
| Techology (nm) | 350 | 500 | 180 | 65 | 180 | 65 | 65 | 65 | 28 |
| Application | Deep-Tissue Stim. | Back-Telemetry | US-ID IMD | IMD Stim. | Elec./Opt. Nerve Stim. | Environment Expl. | Neural Stim. | Impl. Light Sensor | Neural Stim./Imaging |
| Distance Range (cm) | 5.0 | 0.2 | - | 6.0–8.5 | 10.5 | 320 | 5.5 | 5.0 | 1.0 |
| Modulation scheme | OOK-PM | ASK | OOK/ASK | OOK | PWM-ASK | OOK | OOK | OOK | BPSK |
| Carrier Amplitude | 3.0–4.5 | 2.7–10 | 1.5 | 1.0 | 4.5 * | - | 4.0 | 4.0–5.0 | 2.0–4.5 (1.8 *) |
| Carrier Data Frequency (MHz) | 1.0 | 13.56 | 1.0 | 1.0 | 1.3 | 40 | 1.85 | 2.0 | 2.0 |
| Data Rate (kbps) | 25.0 | - | 50.0 | 25.0 | 11.0 | 1.0 | - | - | 1333 |
| (V) | 2.5–3.3 | 1.9–3.8 | 1.5 | 1.0 | 1.8 | 0.8 | 2.5 | 1.2 | 0.9 |
| Demodulator Power Cons. (μW) | <400 | 3.3 | 184 | - | 13.75 | 1.18 | - | <140 | 3.3 |
| 16 | - | 3680 | - | 1250 | 1.18 | - | - | 2.5 | |
| BER | - | - | - | < | < | < | - | < | < |
| 360 | - | - | - | 140 | - | - | - | 1848 | |
| 0.17 | - | - | - | 43.82 | - | - | - | 109272 | |
| 0.021 | - | - | - | 1.42 | - | - | - | 85.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ballo, A.; Grasso, A.D.; Privitera, M. A 28 nm Bulk CMOS Fully Digital BPSK Demodulator for US-Powered IMDs Downlink Communications. Electronics 2022, 11, 698. https://doi.org/10.3390/electronics11050698
Ballo A, Grasso AD, Privitera M. A 28 nm Bulk CMOS Fully Digital BPSK Demodulator for US-Powered IMDs Downlink Communications. Electronics. 2022; 11(5):698. https://doi.org/10.3390/electronics11050698
Chicago/Turabian StyleBallo, Andrea, Alfio Dario Grasso, and Marco Privitera. 2022. "A 28 nm Bulk CMOS Fully Digital BPSK Demodulator for US-Powered IMDs Downlink Communications" Electronics 11, no. 5: 698. https://doi.org/10.3390/electronics11050698
APA StyleBallo, A., Grasso, A. D., & Privitera, M. (2022). A 28 nm Bulk CMOS Fully Digital BPSK Demodulator for US-Powered IMDs Downlink Communications. Electronics, 11(5), 698. https://doi.org/10.3390/electronics11050698