
Design of Active Continuous Variable Transmission Control System with Planetary Gear



Abstract
:1. Introduction
2. Material and Method
2.1. Analysis of Continuous Variable Transmission Control System
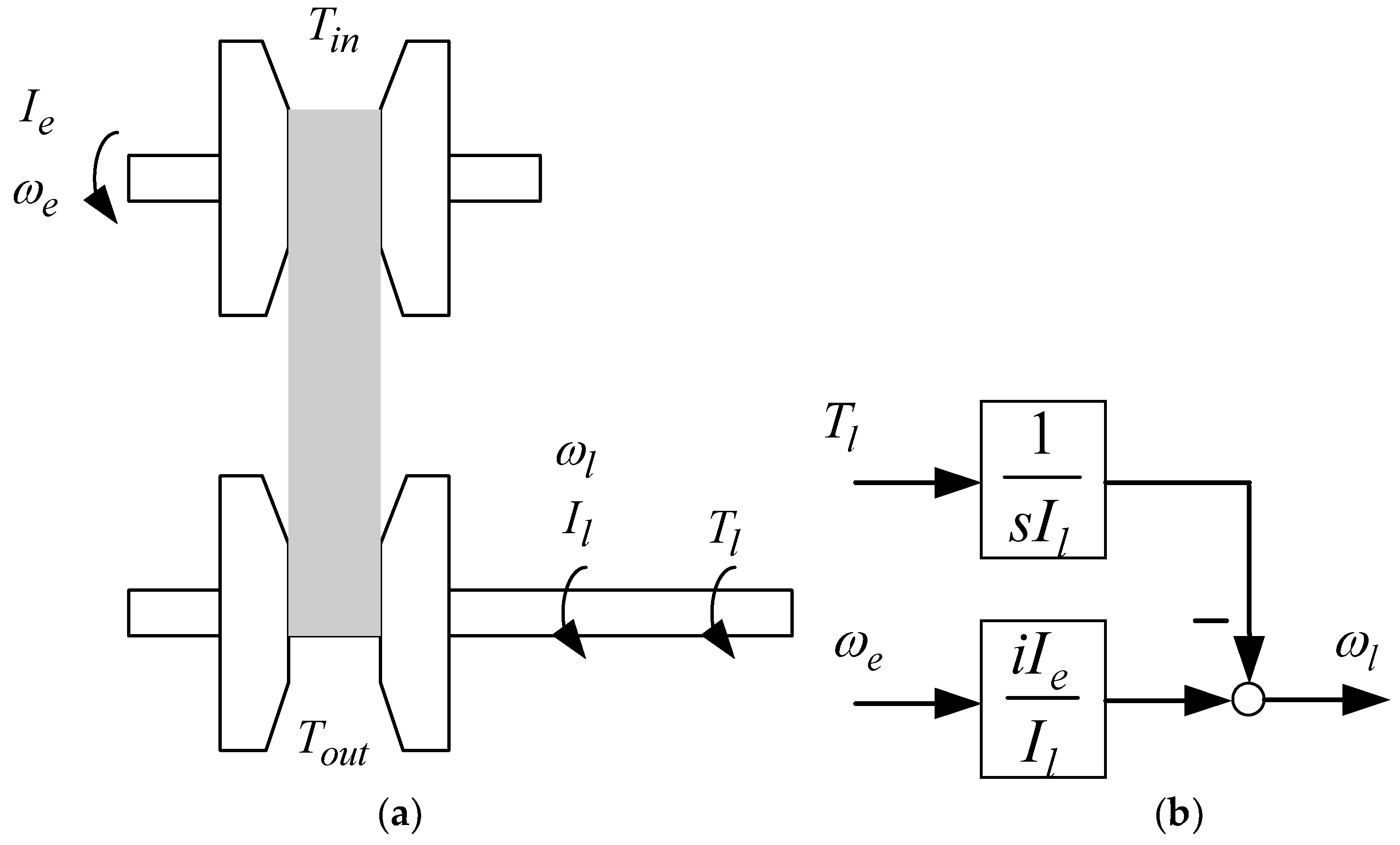
2.1.1. Reduction Drive
2.1.2. Increasing Drive
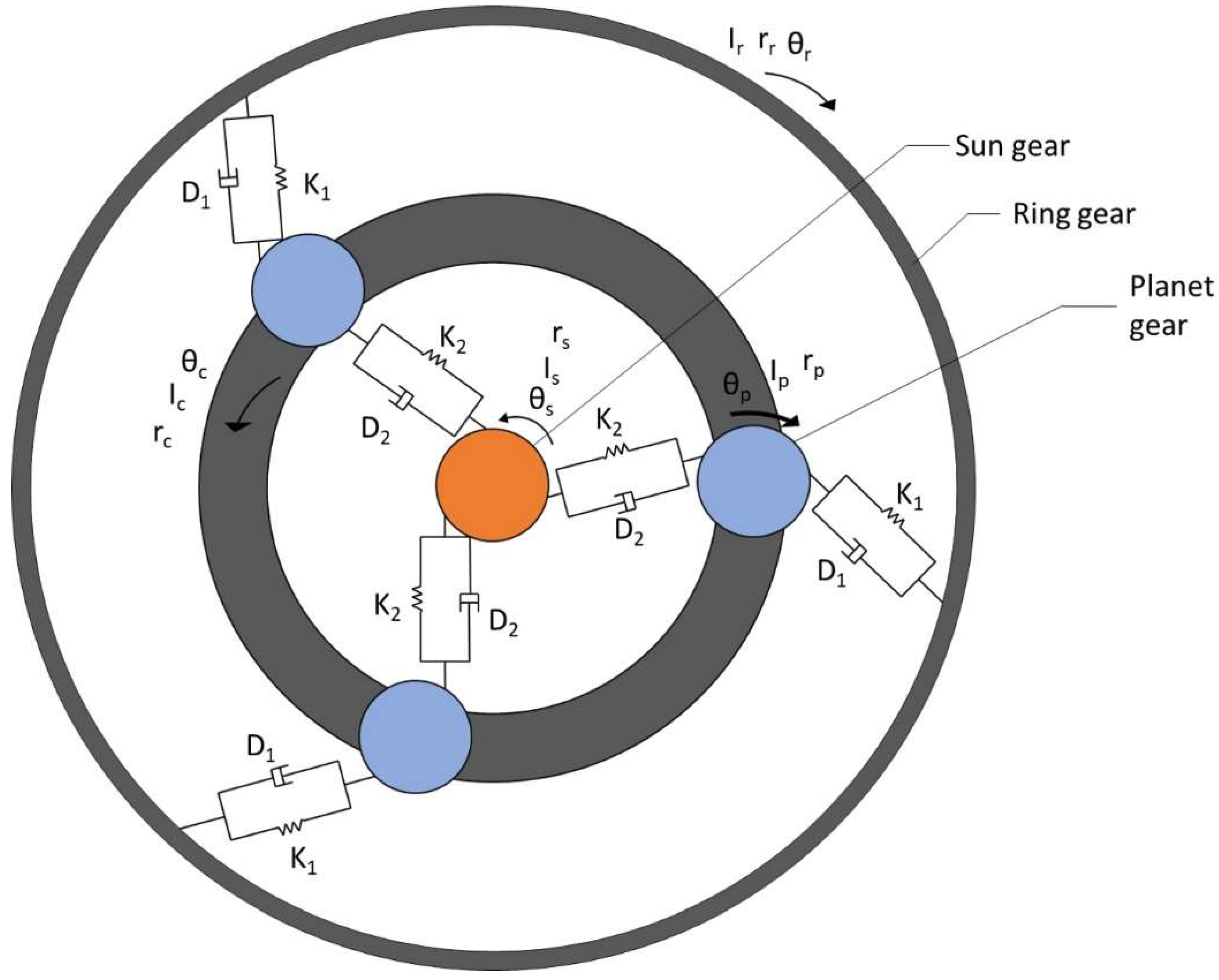
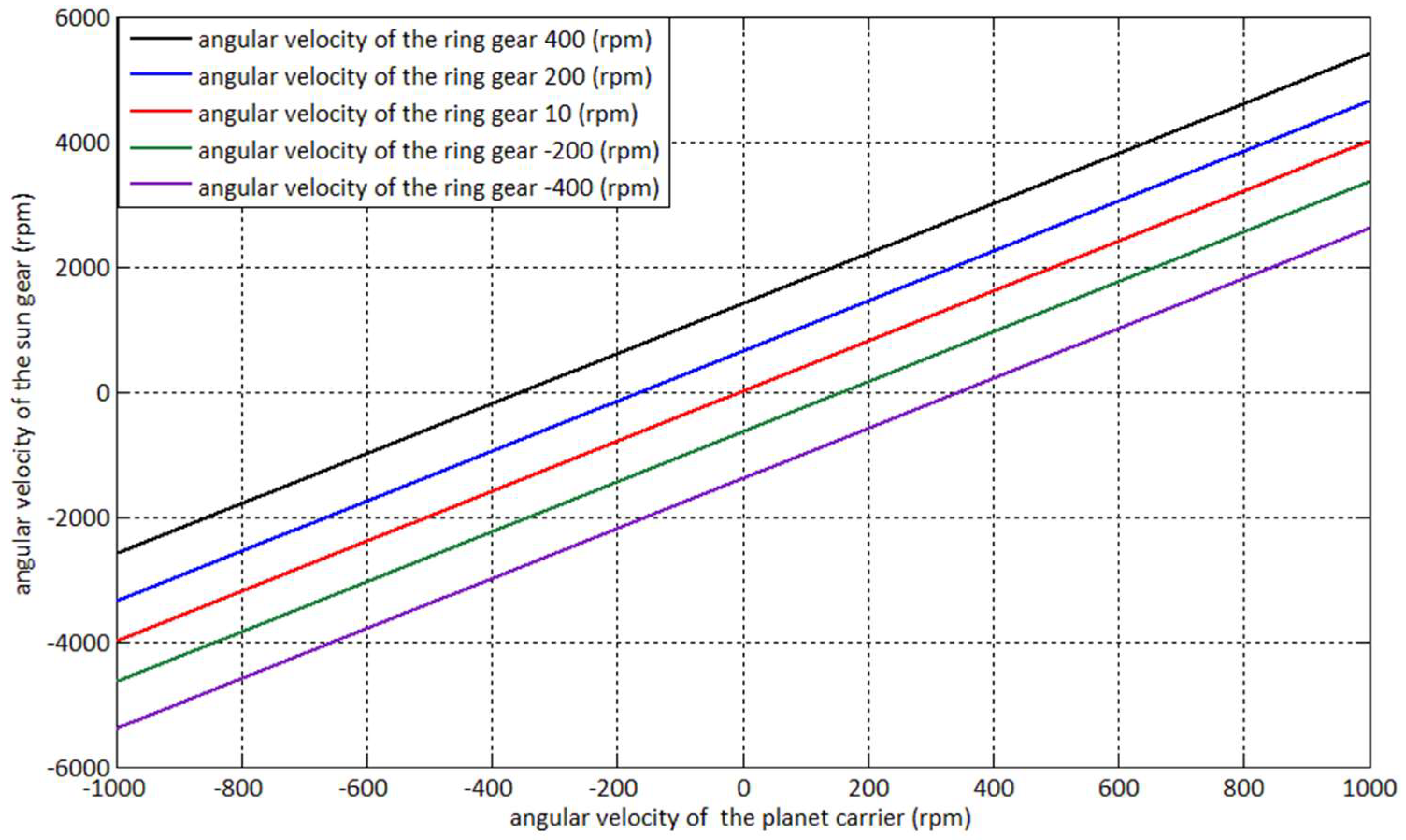
2.2. Dynamic Analysis of the Planetary Gear
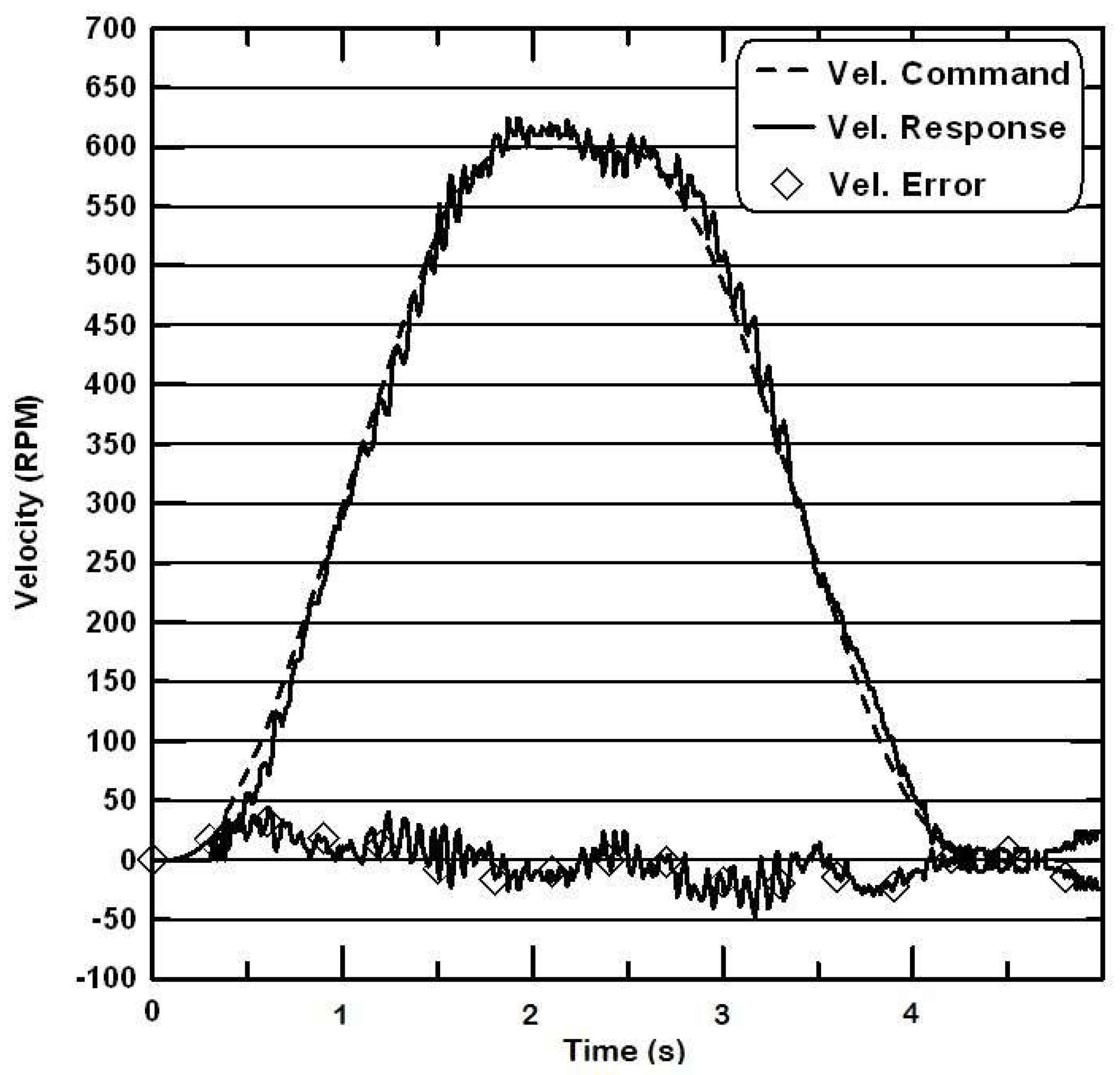
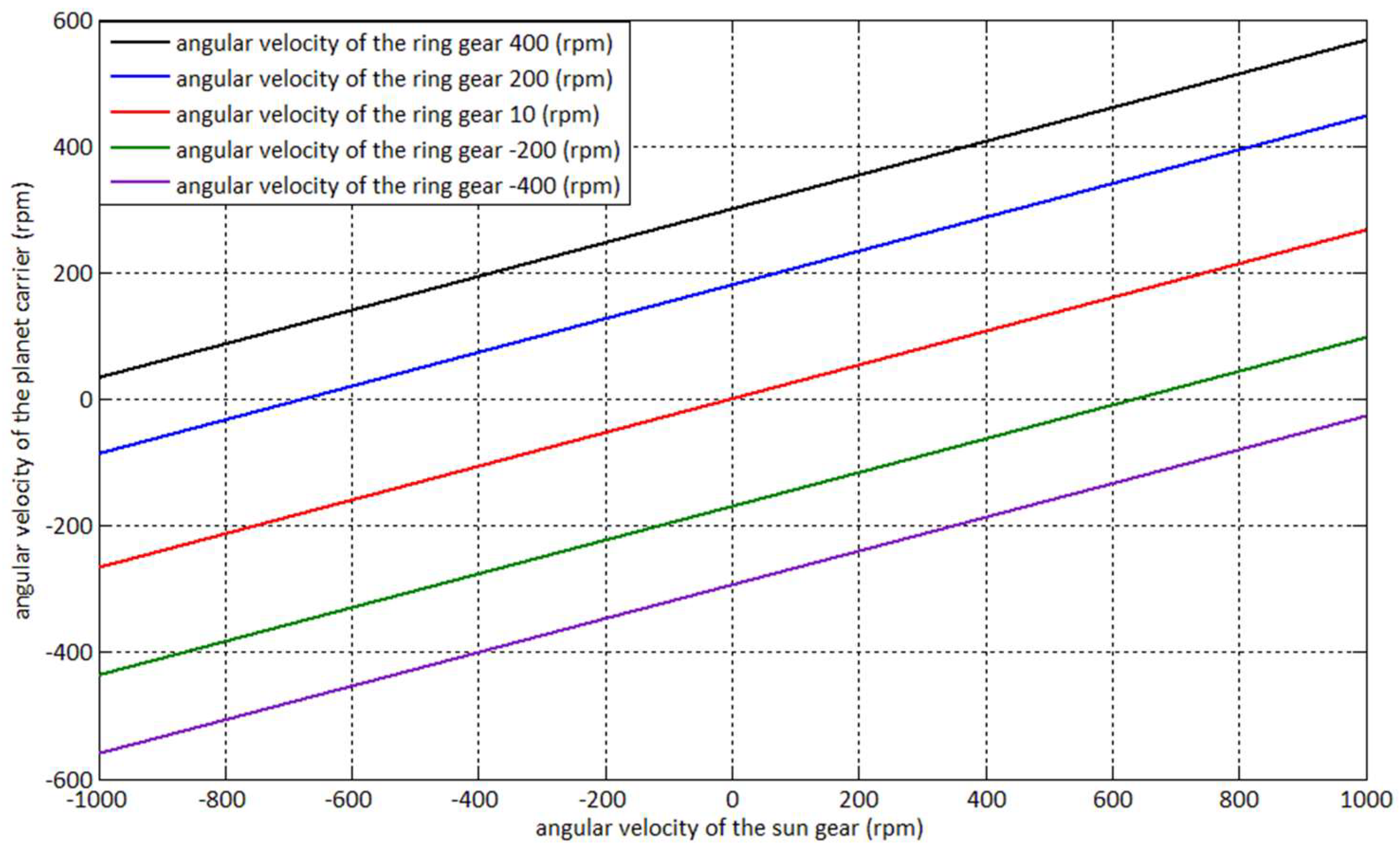
3. Results Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tang, X.; Zhang, J.; Zou, L.; Yu, H.; Zhang, D. Study on the torsional vibration of a hybrid electric vehicle powertrain with compound planetary power-split electronic continuous variable transmission. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 228, 3107–3115. [Google Scholar] [CrossRef]
- Yu, H.S.; Zhang, J.W.; Zhang, T. Control strategy design and experimental research on a four-shaft electronic continuously variable transmission hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1594–1612. [Google Scholar] [CrossRef]
- Ayats, J.R.G.; Diego-Ayala, U.; Artes, F.F. The singular point transition concept: A novel continuously variable transmission comprising planetary gear trains and a variator. J. Power Sources 2012, 197, 125–135. [Google Scholar] [CrossRef]
- Li, X.; Wang, A. A modularization method of dynamic system modeling for multiple planetary gear trains transmission gearbox. Mech. Mach. Theory 2019, 136, 162–177. [Google Scholar] [CrossRef]
- Miyazaki, T.; Ohishi, K. Robust speed control system considering vibration suppression caused by angular transmission error of planetary gear. IEEE/ASME Trans. Mechatron. 2002, 7, 235–244. [Google Scholar] [CrossRef]
- Christie, M.D.; Sun, S.; Quenzer-Hohmuth, J.; Deng, L.; Du, H.; Li, W.H. A magnetorheological fluid based planetary gear transmission for mechanical power-flow control. Smart Mater. Struct. 2021, 30, 045013. [Google Scholar] [CrossRef]
- Munahar, S.; Purnomo, B.C.; Köten, H. Fuel control systems for planetary transmission vehicles: A contribution to the LPG-fueled vehicles community. Mech. Eng. Soc. Ind. 2021, 1, 14–21. [Google Scholar] [CrossRef]
- Chen, C.L.; Wang, C.C.; Tsai, M.C.; Ko, P.J. Control system design of power assisted bike based on planetary gear. In Proceedings of the 2019 First International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, 16–18 January 2019; pp. 171–174. [Google Scholar]
- Ngo, H.T.; Yan, H.S. Novel configurations for hybrid transmissions using a simple planetary gear train. J. Mech. Robot. 2016, 8, 021020. [Google Scholar] [CrossRef]
- Zhuang, W.; Zhang, X.; Ding, Y.; Wang, L.; Hu, X. Comparison of multi-mode hybrid powertrains with multiple planetary gears. Appl. Energy 2016, 178, 624–632. [Google Scholar] [CrossRef]
- Kim, B.; Song, J.; Park, J. A serial-type dual actuator unit with planetary gear train: Basic design and applications. IEEE/ASME Trans. Mechatron. 2010, 15, 108–116. [Google Scholar]
- Chang, Y.; Chang, C.; Taur, J.; Tao, C. Fuzzy swing-up and fuzzy sliding-mode balance control for a planetary-gear-type inverted pendulum. IEEE Trans. Ind. Electron. 2009, 56, 3751–3761. [Google Scholar] [CrossRef]
- Lee, H.; Choi, Y. A new actuator system using dual-motors and a planetary gear. IEEE/ASME Trans. Mechatron. 2012, 17, 192–197. [Google Scholar] [CrossRef]
- Park, J.; Ha, J.M.; Oh, H.; Youn, B.D.; Choi, J.-H.; Kim, N.H. Model-based fault diagnosis of a planetary gear: A novel approach using transmission error. IEEE Trans. Reliab. 2016, 65, 1830–1841. [Google Scholar] [CrossRef]
- Marzebali, M.H.; Faiz, J.; Capolino, G.; Kia, S.H.; Henao, H. Planetary gear fault detection based on mechanical torque and stator current signatures of a wound rotor induction generator. IEEE Trans. Energy Convers. 2018, 33, 1072–1085. [Google Scholar] [CrossRef]
- Yan, H.S.; Wu, Y.C. A novel design of a brushless DC motor integrated with an embedded planetary gear train. IEEE/ASME Trans. Mechatron. 2006, 11, 551–557. [Google Scholar] [CrossRef]
- Wang, Y.; Tang, B.; Meng, L.; Hou, B. Adaptive estimation of instantaneous angular speed for wind turbine planetary gearbox fault detection. IEEE Access 2019, 7, 49974–49984. [Google Scholar] [CrossRef]
- Wang, F.; Ye, P.; Xu, X.; Cai, Y.; Ni, S.; Que, H. Novel regenerative braking method for transient torsional oscillation suppression of planetary-gear electrical powertrain. Mech. Syst. Signal Processing 2022, 163, 108187. [Google Scholar] [CrossRef]
- Liu, W.; Shi, K.; Tupolev, V.; Yu, G.; Dai, B. Nonlinear dynamics of a two-stage planetary gear system with sliding friction and elastic continuum ring gear. J. Mech. Sci. Technol. 2022, 36, 77–85. [Google Scholar] [CrossRef]
- Cui, T.; Li, Y.; Zan, C.; Chen, Y. Dynamic modeling and analysis of nonlinear compound planetary system. Machines 2022, 10, 31. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, N. Driving mode shift control for planetary gear based dual motor powertrain in electric vehicles. Mech. Mach. Theory 2021, 158, 104217. [Google Scholar] [CrossRef]
- Yang, H.; Li, X.; Xu, J.; Yang, Z.; Chen, R. Dynamic characteristics analysis of planetary gear system with internal and external excitation under turbulent wind load. Sci. Prog. 2021, 104, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Nishimura, T.; Motoi, N. Motion control method based on two-link manipulator model with bi-articular muscle considering planetary gear. In Proceedings of the 2021 IEEE International Conference on Mechatronics, Kashiwa, Japan, 7–9 March 2021; pp. 1–6. [Google Scholar]
- Jiang, X.; Hu, J.; Peng, H.; Chen, Z. A design methodology for hybrid electric vehicle powertrain configurations with planetary gear sets. J. Mech. Des. 2021, 143, 083402. [Google Scholar] [CrossRef]
- Mantriota, G.; Reina, G. Dual-motor planetary transmission to improve efficiency in electric vehicles. Machines 2021, 9, 58. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, W.-S.; Lin, C.-Y. Design of Active Continuous Variable Transmission Control System with Planetary Gear. Electronics 2022, 11, 986. https://doi.org/10.3390/electronics11070986
Yao W-S, Lin C-Y. Design of Active Continuous Variable Transmission Control System with Planetary Gear. Electronics. 2022; 11(7):986. https://doi.org/10.3390/electronics11070986
Chicago/Turabian StyleYao, Wu-Sung, and Chun-Yi Lin. 2022. "Design of Active Continuous Variable Transmission Control System with Planetary Gear" Electronics 11, no. 7: 986. https://doi.org/10.3390/electronics11070986
APA StyleYao, W. -S., & Lin, C. -Y. (2022). Design of Active Continuous Variable Transmission Control System with Planetary Gear. Electronics, 11(7), 986. https://doi.org/10.3390/electronics11070986