
A Variable Structure Multiple-Model Estimation Algorithm Aided by Center Scaling


Abstract
:1. Introduction
2. Multiple-Model Algorithm
2.1. The Process of FIMM
2.2. The Process of VSIMM
3. Model Optimization Method
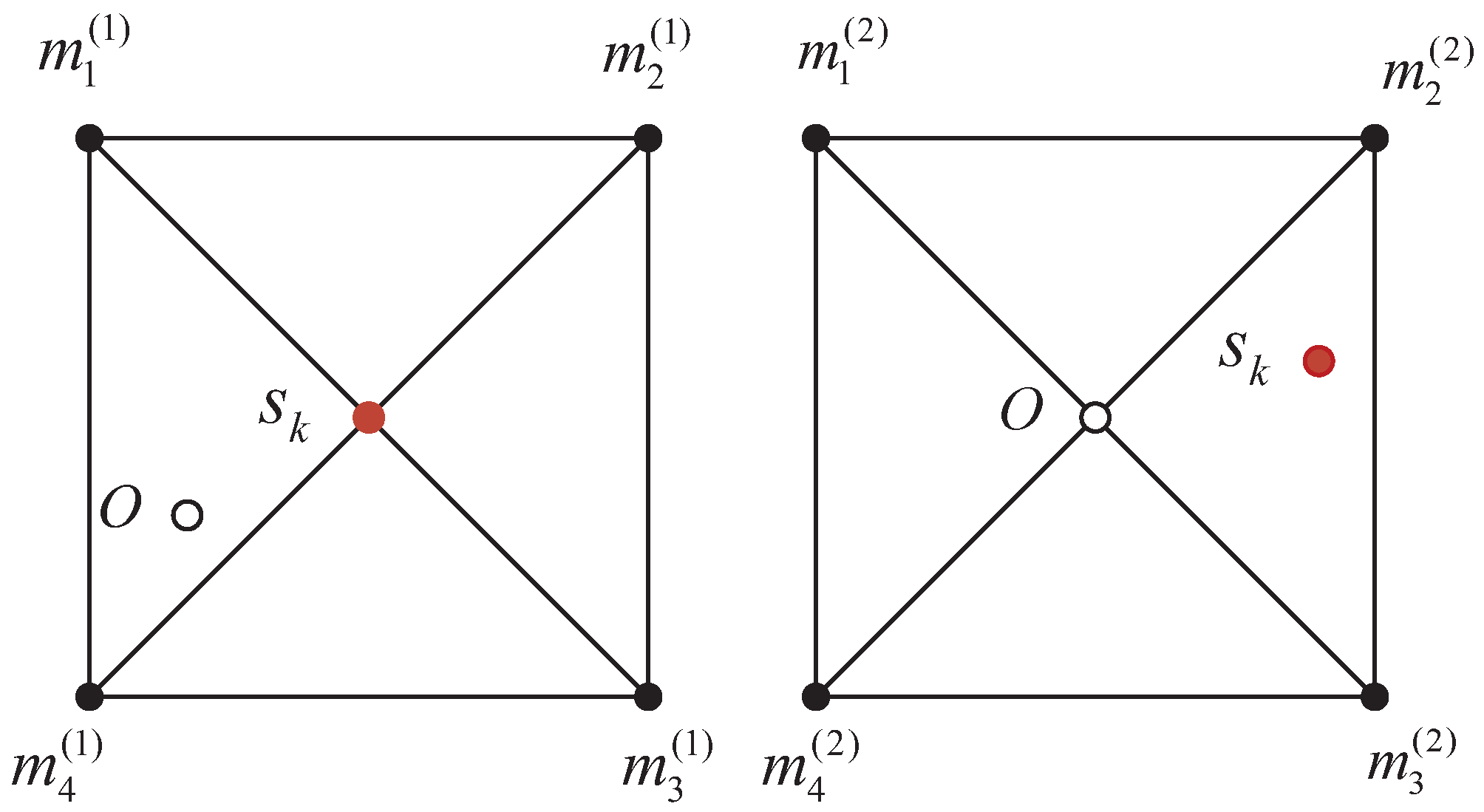
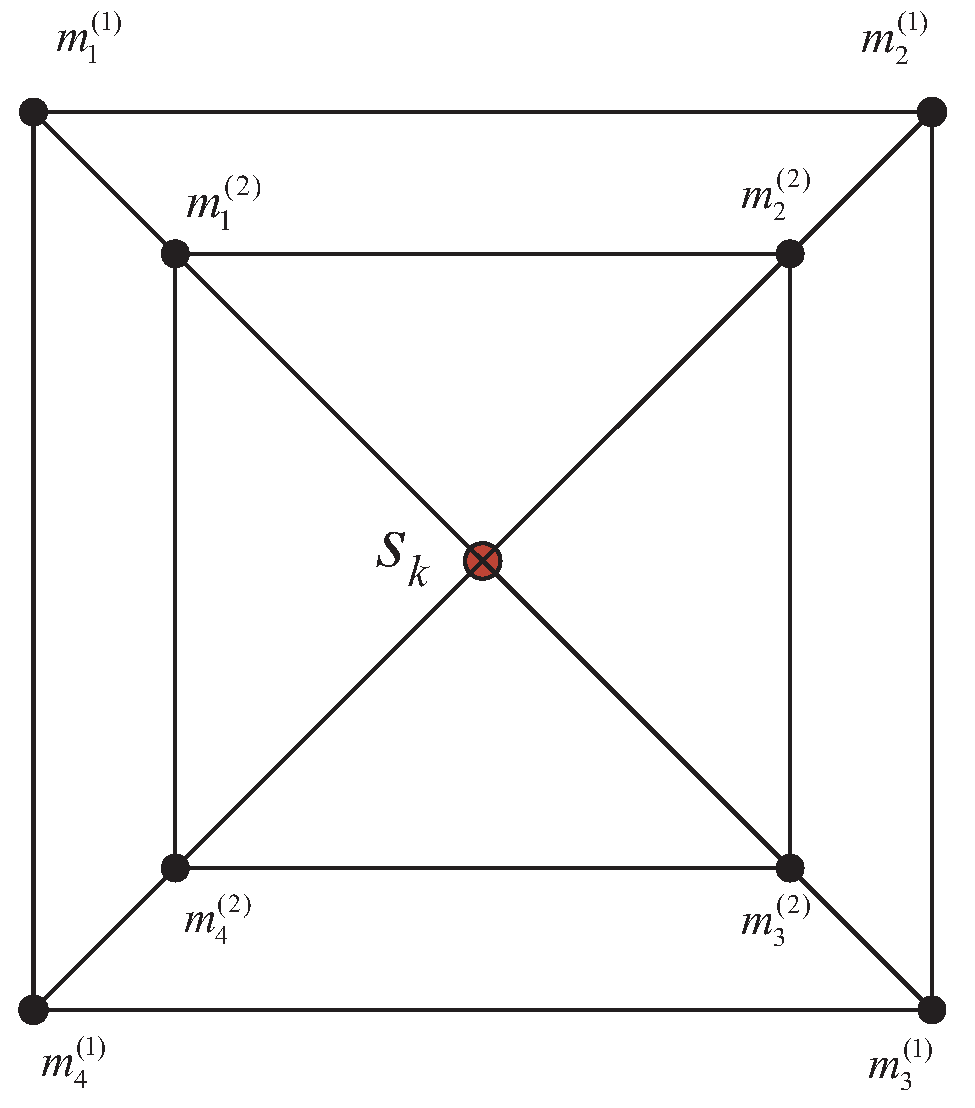
3.1. Symmetric Model Set Optimization Method
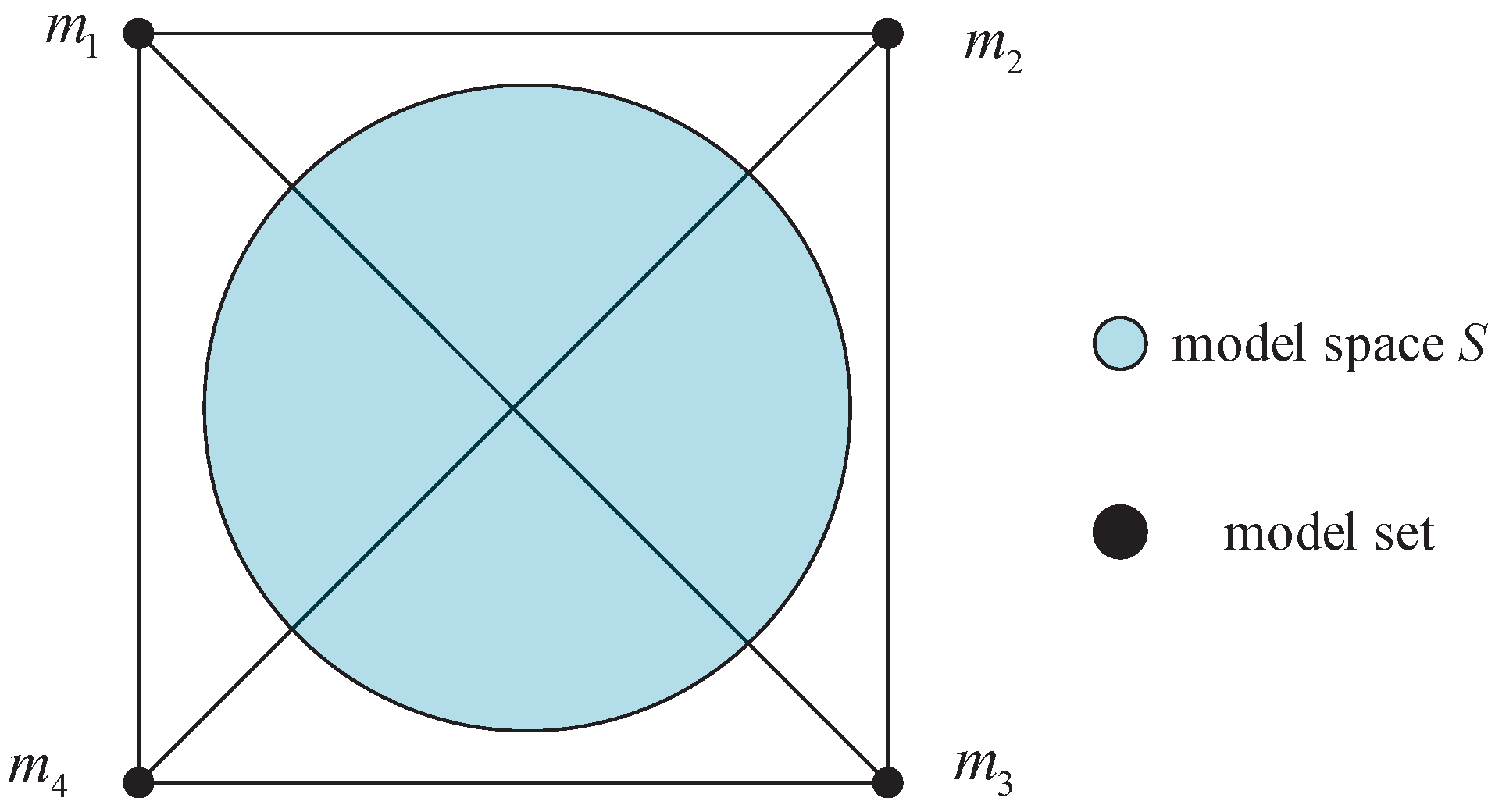
3.2. Proportional Reduction Optimization Method
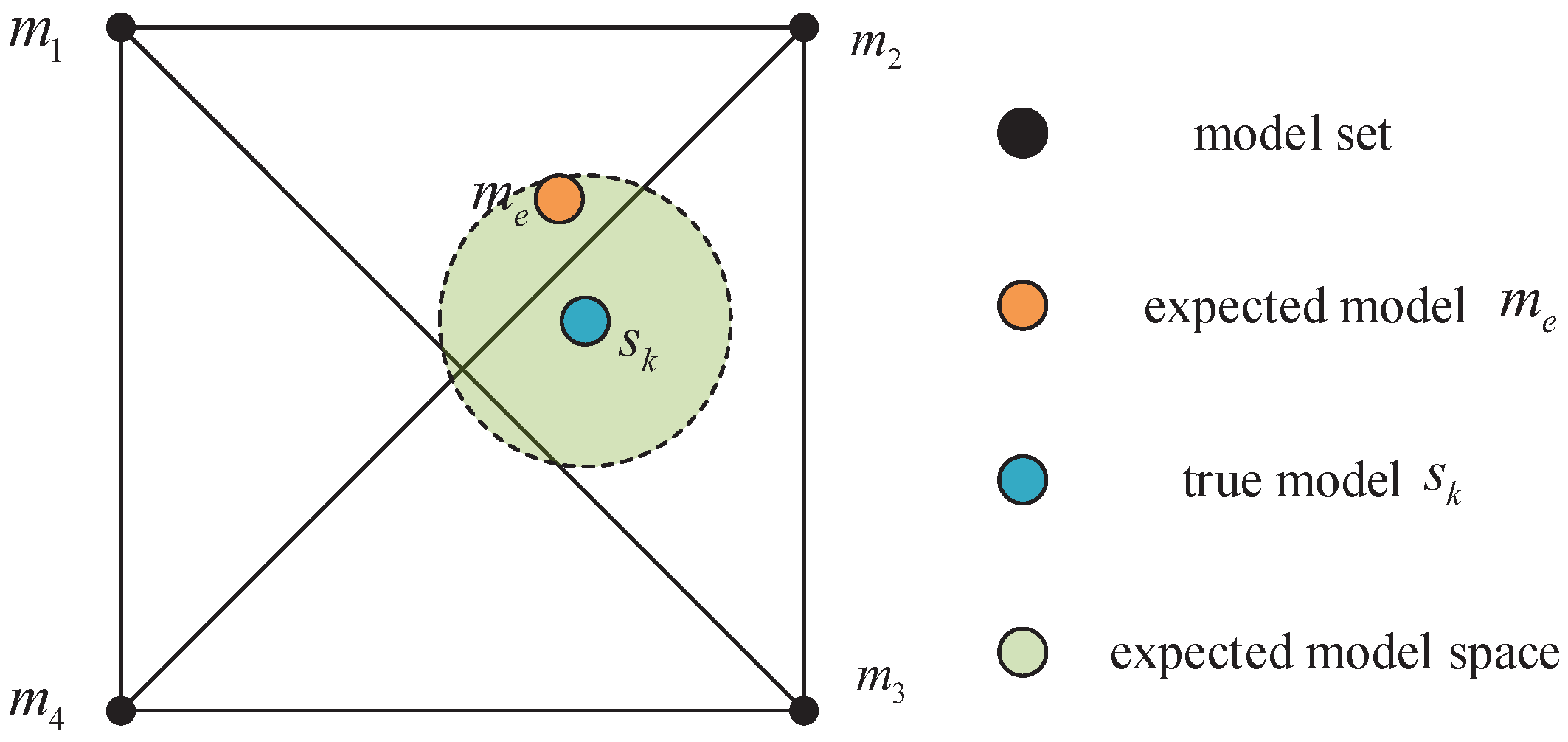
3.3. Expected Model Optimization Method
4. Variable Structure of Interacting Multiple-Model Algorithm Aided by Center Scaling
| Algorithm 1 VSIMM-CS Process |
|
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gorji, A.A.; Tharmarasa, R.; Kirubarajan, T. Performance measures for multiple target tracking problems. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Poore, A.B.; Gadaleta, S. Some assignment problems arising from multiple target tracking. Math. Comput. Model. 2006, 43, 1074–1091. [Google Scholar] [CrossRef]
- Huang, X.; Tsoi, J.K.; Patel, N. mmWave Radar Sensors Fusion for Indoor Object Detection and Tracking. Electronics 2022, 11, 2209. [Google Scholar] [CrossRef]
- Wei, Y.; Hong, T.; Kadoch, M. Improved Kalman filter variants for UAV tracking with radar motion models. Electronics 2020, 9, 768. [Google Scholar] [CrossRef]
- Li, X.R.; Bar-Shalom, Y. Multiple-model estimation with variable structure. IEEE Trans. Autom. Control 1996, 41, 478–493. [Google Scholar]
- Magill, D. Optimal adaptive estimation of sampled stochastic processes. IEEE Trans. Autom. Control 1965, 10, 434–439. [Google Scholar] [CrossRef]
- Lainiotis, D. Optimal adaptive estimation: Structure and parameter adaption. IEEE Trans. Autom. Control 1971, 16, 160–170. [Google Scholar] [CrossRef]
- Tudoroiu, N.; Khorasani, K. Satellite fault diagnosis using a bank of interacting Kalman filters. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1334–1350. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y.; Pattipati, K.R.; Kadar, I. Ground target tracking with variable structure IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 26–46. [Google Scholar] [CrossRef]
- Grossman, R.L.; Nerode, A.; Ravn, A.P.; Rischel, H. Hybrid Systems; Springer: Berlin/Heidelberg, Germany, 1993; Volume 736. [Google Scholar]
- Branicky, M.S. Introduction to hybrid systems. In Handbook of Networked and Embedded Control Systems; Birkhäuser: Basel, Switzerland, 2005; pp. 91–116. [Google Scholar]
- Li, X.R. Multiple-model estimation with variable structure. II. Model-set adaptation. IEEE Trans. Autom. Control 2000, 45, 2047–2060. [Google Scholar]
- Labbe, R. Kalman and bayesian filters in python. Chap 2014, 7, 4. [Google Scholar]
- Zhang, G.; Lian, F.; Gao, X.; Kong, Y.; Chen, G.; Dai, S. An Efficient Estimation Method for Dynamic Systems in the Presence of Inaccurate Noise Statistics. Electronics 2022, 11, 3548. [Google Scholar] [CrossRef]
- Rong Li, X.; Jilkov, V. Survey of maneuvering target tracking. Part V. Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar] [CrossRef]
- Bar-Shalom, Y. Multitarget-Multisensor Tracking: Applications and Advances; Artech House, Inc.: Norwood, MA, USA, 2000; Volume iii. [Google Scholar]
- Blom, H.A.; Bar-Shalom, Y. The interacting multiple model algorithm for systems with Markovian switching coefficients. IEEE Trans. Autom. Control 1988, 33, 780–783. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, S.; Huang, B. Multiple-Model State Estimation Based on Variational Bayesian Inference. IEEE Trans. Autom. Control 2019, 64, 1679–1685. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Zhang, Y. Variational Bayesian IMM-filter for JMSs with unknown noise covariances. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 1652–1661. [Google Scholar] [CrossRef]
- Li, H.; Yan, L.; Xia, Y. Distributed robust Kalman filtering for Markov jump systems with measurement loss of unknown probabilities. IEEE Trans. Cybern. 2021, 52, 10151–10162. [Google Scholar] [CrossRef]
- Johnston, L.; Krishnamurthy, V. An improvement to the interacting multiple model (IMM) algorithm. IEEE Trans. Signal Process. 2001, 49, 2909–2923. [Google Scholar] [CrossRef]
- Fan, X.; Wang, G.; Han, J.; Wang, Y. Interacting Multiple Model Based on Maximum Correntropy Kalman Filter. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3017–3021. [Google Scholar] [CrossRef]
- Davis, R.R.; Clavier, O. Impulsive noise: A brief review. Hear. Res. 2017, 349, 34–36. [Google Scholar] [CrossRef]
- Nie, X. Multiple model tracking algorithms based on neural network and multiple process noise soft switching. J. Syst. Eng. Electron. 2009, 20, 1227–1232. [Google Scholar]
- Mazor, E.; Averbuch, A.; Bar-Shalom, Y.; Dayan, J. Interacting multiple model methods in target tracking: A survey. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 103–123. [Google Scholar] [CrossRef]
- Gao, W.; Wang, Y.; Homaifa, A. Discrete-time variable structure control systems. IEEE Trans. Ind. Electron. 1995, 42, 117–122. [Google Scholar]
- Li, X.R.; Bar-Shakm, Y. Mode-set adaptation in multiple-model estimators for hybrid systems. In Proceedings of the 1992 American Control Conference, Chicago, IL, USA, 24–26 June 1992; pp. 1794–1799. [Google Scholar]
- Pannetier, B.; Benameur, K.; Nimier, V.; Rombaut, M. VS-IMM using road map information for a ground target tracking. In Proceedings of the 2005 7th International Conference on Information Fusion, Philadelphia, PA, USA, 25–28 July 2005; Volume 1. 8p. [Google Scholar]
- Xu, L.; Li, X.R. Multiple model estimation by hybrid grid. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 142–147. [Google Scholar]
- Li, X.R.; Zwi, X.; Zwang, Y. Multiple-model estimation with variable structure. III. Model-group switching algorithm. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 225–241. [Google Scholar]
- Li, X.R.; Jilkov, V.P.; Ru, J. Multiple-model estimation with variable structure-part VI: Expected-mode augmentation. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 853–867. [Google Scholar]
- Lan, J.; Li, X.R. Equivalent-Model Augmentation for Variable-Structure Multiple-Model Estimation. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2615–2630. [Google Scholar] [CrossRef]
- Li, X.R.; Zhang, Y. Multiple-model estimation with variable structure. V. Likely-model set algorithm. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 448–466. [Google Scholar]
- Sun, F.; Xu, E.; Ma, H. Design and comparison of minimal symmetric model-subset for maneuvering target tracking. J. Syst. Eng. Electron. 2010, 21, 268–272. [Google Scholar] [CrossRef]
- Callier, F.M.; Desoer, C.A. Linear System Theory; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time k (s) | (m/s2) | (m/s2) |
|---|---|---|
| 1–50 | 0 | 0 |
| 50–100 | 5 | 5 |
| 100–150 | 3 | |
| 150–200 | 7 | |
| 200–250 | 4 | 1 |
| 250–300 | ||
| 300–350 | 0 | 0 |
| α | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | |
|---|---|---|---|---|---|---|
| λ | ||||||
| 0.8 | 16.72 | 13.00 | 10.45 | 8.59 | 7.19 | |
| 1.9 | 13.29 | 9.89 | 7.55 | 5.84 | 4.56 | |
| 3 | 10.16 | 6.96 | 4.76 | 3.15 | 1.98 | |
| 4.1 | 7.21 | 4.16 | 2.09 | 0.98 | 1.52 | |
| 5.2 | 4.32 | 1.53 | 1.86 | 3.14 | 4.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Li, G.; Jin, W.; Zhang, S.; Sheng, W. A Variable Structure Multiple-Model Estimation Algorithm Aided by Center Scaling. Electronics 2023, 12, 2257. https://doi.org/10.3390/electronics12102257
Wang Q, Li G, Jin W, Zhang S, Sheng W. A Variable Structure Multiple-Model Estimation Algorithm Aided by Center Scaling. Electronics. 2023; 12(10):2257. https://doi.org/10.3390/electronics12102257
Chicago/Turabian StyleWang, Qiang, Guowei Li, Weitong Jin, Shurui Zhang, and Weixing Sheng. 2023. "A Variable Structure Multiple-Model Estimation Algorithm Aided by Center Scaling" Electronics 12, no. 10: 2257. https://doi.org/10.3390/electronics12102257
APA StyleWang, Q., Li, G., Jin, W., Zhang, S., & Sheng, W. (2023). A Variable Structure Multiple-Model Estimation Algorithm Aided by Center Scaling. Electronics, 12(10), 2257. https://doi.org/10.3390/electronics12102257