
A Software-Defined Distributed Architecture for Controlling Unmanned Swarm Systems
 ,
,
Abstract
:1. Introduction
2. Methods
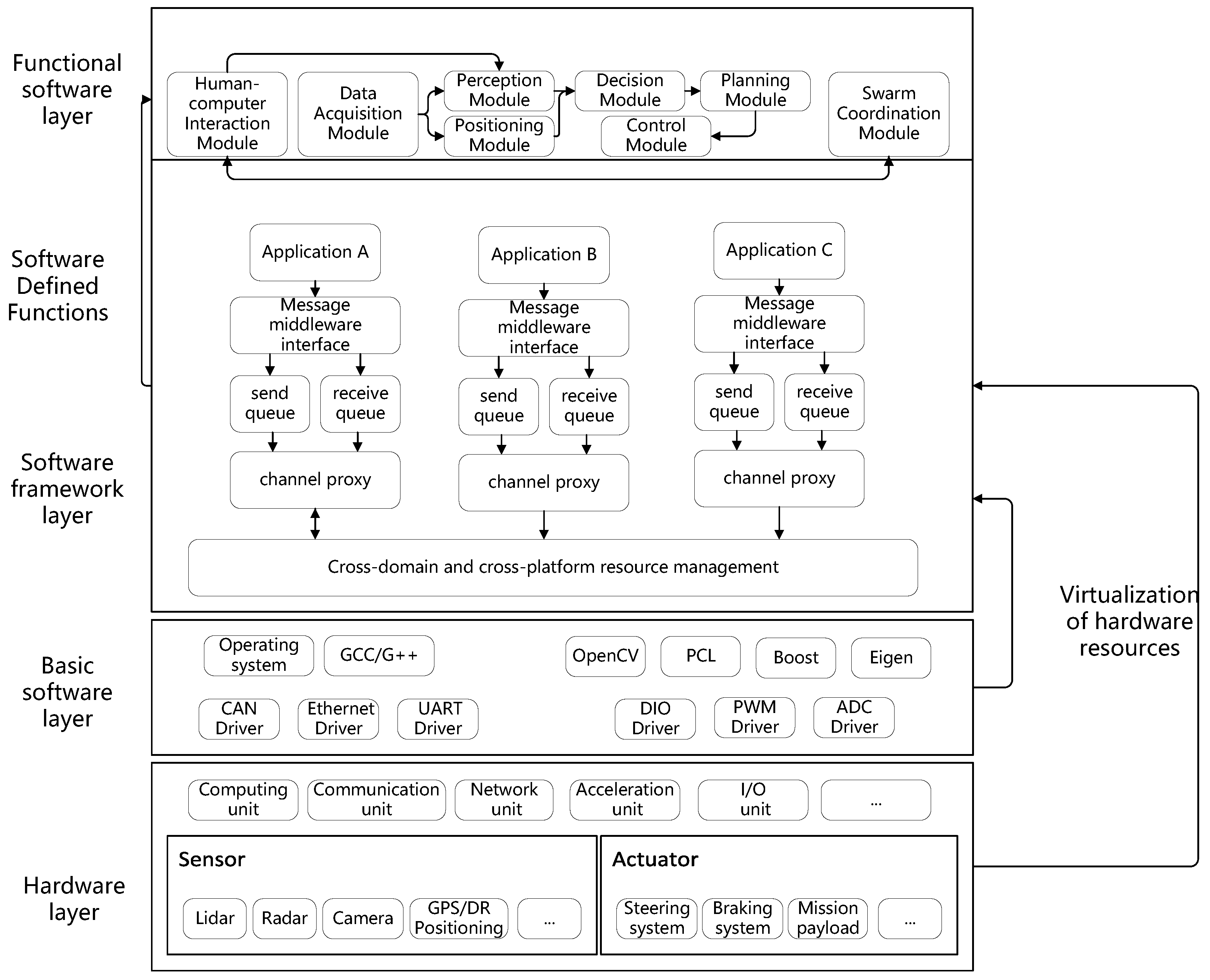
2.1. Overall Architecture
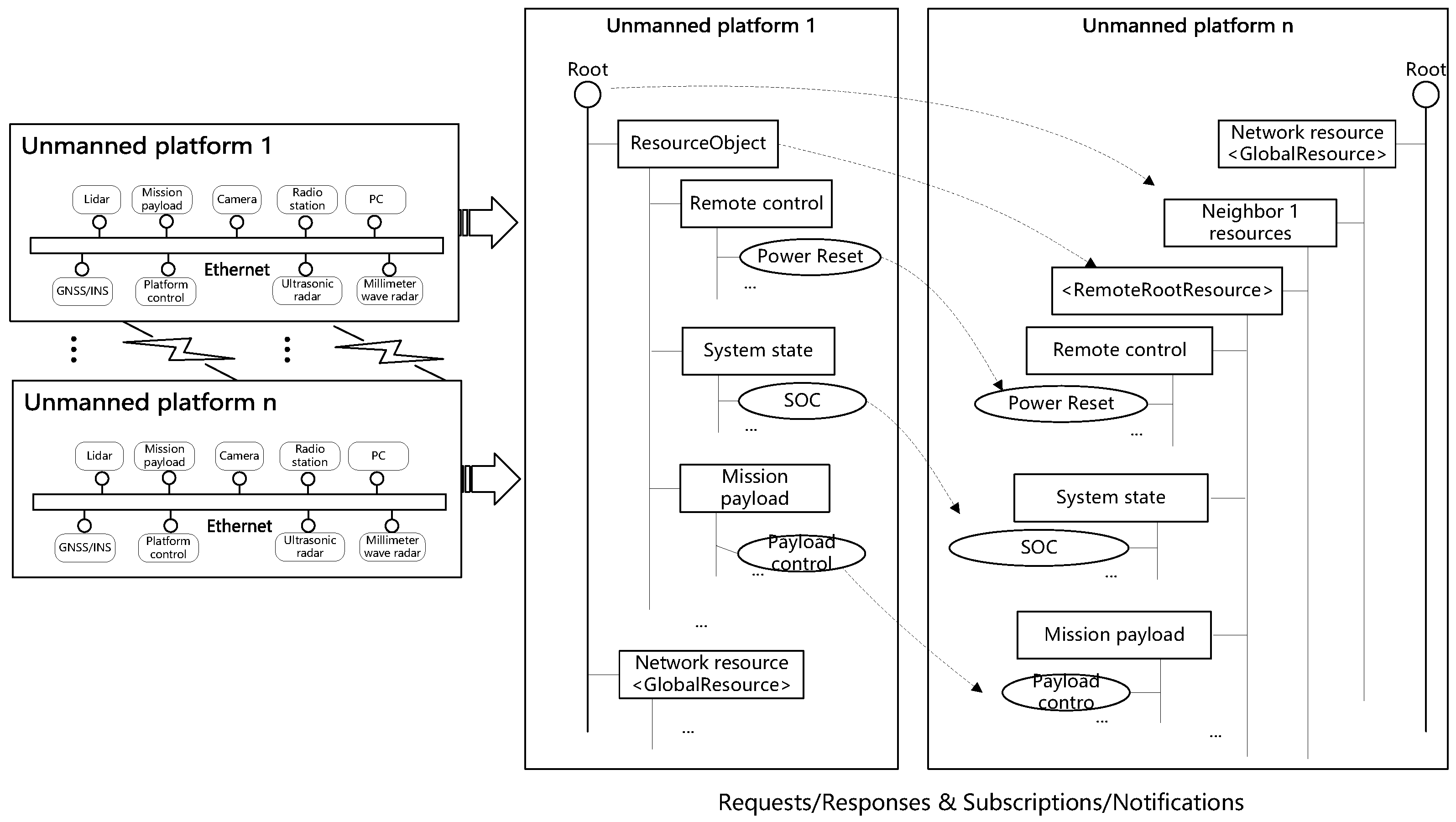
2.2. Resource Representation
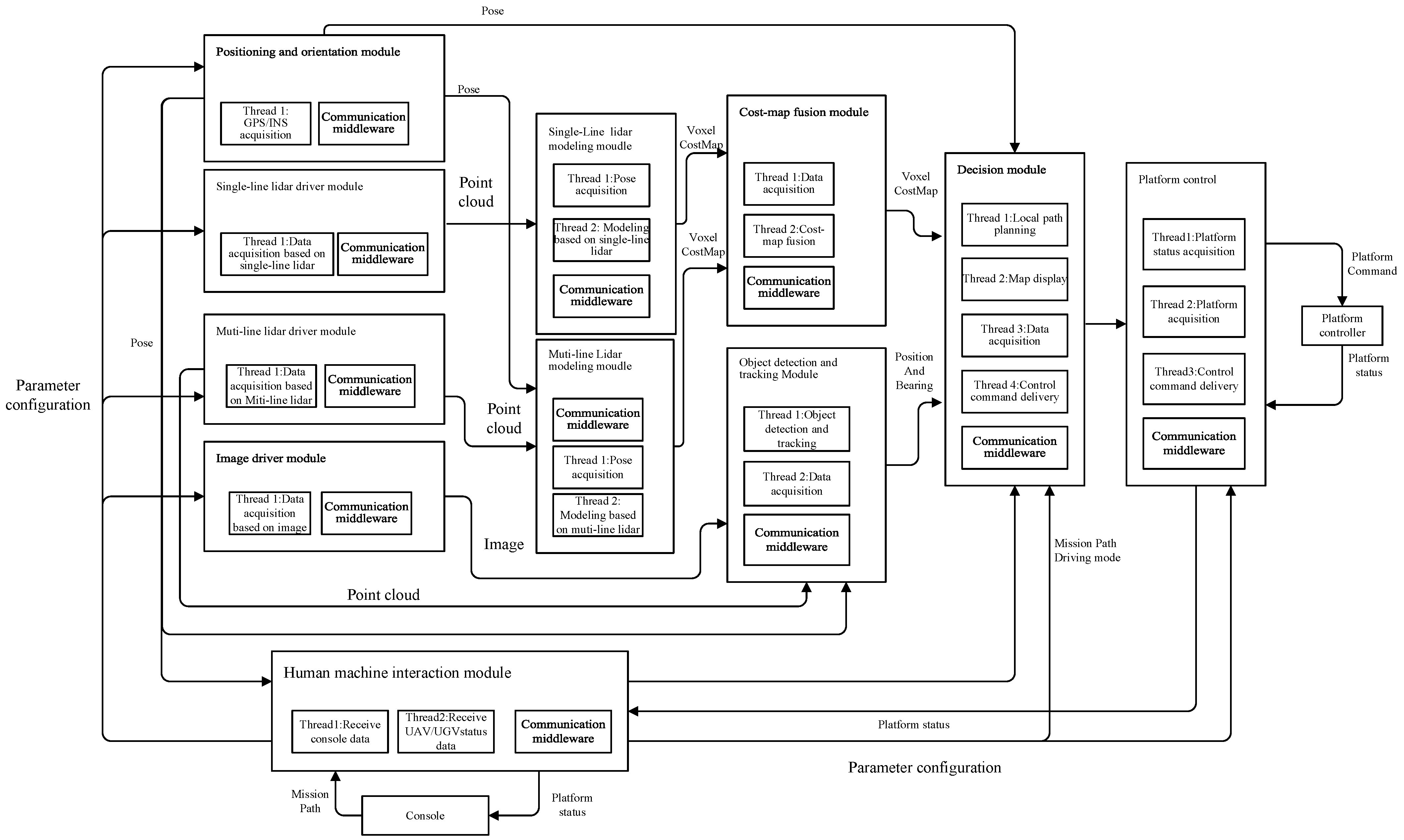
2.3. Resource Scheduling of Single Platform
2.4. Resource Scheduling of Muti-Platform
2.5. Dynamic Storage and Management
3. Results
3.1. Kinematic Model
3.2. Simulation Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dai, H.; Yi, X.; Wang, Y.; Wang, Z.; Yang, X. Parallel Learning Architecture of micROS Powering the Ability of Life-Long Autonomous Learning. J. Comput. Res. Dev. 2019, 56, 49–57. [Google Scholar]
- Kranz, M.; Rusu, R.B.; Maldonado, A.; Beetz, M.; Schmidt, A. A player/stage system for context-aware intelligent environments. Proc. UbiSys 2006, 6, 17–21. [Google Scholar]
- Michal, D.S.; Etzkorn, L. A comparison of player/stage/gazebo and microsoft robotics developer studio. In Proceedings of the 49th Annual Southeast Regional Conference, Kennesaw, GA, USA, 24–26 March 2011; pp. 60–66. [Google Scholar]
- Matta-Gómez, A.; Del Cerro, J.; Barrientos, A. Multi-robot data mapping simulation by using microsoft robotics developer studio. Simul. Model. Pract. Theory 2014, 49, 305–319. [Google Scholar] [CrossRef]
- Kraetzschmar, G.; Utz, H.; Sablatnög, S.; Enderle, S.; Palm, G. Miro-middleware for cooperative robotics. In Proceedings of the RoboCup 2001: Robot Soccer World Cup V 5; Springer: Berlin/Heidelberg, Germany, 2002; pp. 411–416. [Google Scholar]
- Albus, J.S. 4D/RCS: A reference model architecture for intelligent unmanned ground vehicles. Proc. SPIE 2002, 4715, 303–310. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Kent, D.; Galluzzo, T.; Bosscher, P.; Bowman, W. Robotic manipulation and haptic feedback via high speed messaging with the joint architecture for un-manned systems (jaus). In Proceedings of the AUVSI Unmanned Systems Conference, Anaheim, CA, USA, 3–5 August 2004. [Google Scholar]
- Pardo-Castellote, G. Omg data-distribution service: Architectural overview. In Proceedings of the 23rd International Conference on Distributed Computing Systems Workshops, Providence, RI, USA, 19–22 May 2003; pp. 200–206. [Google Scholar]
- Sandmann, G.; Thompson, R. Development of AUTOSAR software components within model-based design. Development 2008, 1, 0383. [Google Scholar]
- Jones, J. System of Systems Integration Technology and Experimentation (SoSITE); Defense Advanced Research Projects Agency: Arlington, VA, USA, 2019. [Google Scholar]
- Yang, X.; Dai, H.; Yi, X.; Wang, Y.; Yang, S.; Zhang, B.; Wang, Z.; Zhou, Y.; Peng, X. micROS: A morphable, intelligent and collective robot operating system. Robot. Biomim. 2016, 3, 21. [Google Scholar] [CrossRef] [PubMed]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | Specifications | |
|---|---|---|
| Simulation server | Operating system | Windows |
| Memory | DDR4 64 GB | |
| CPU | Xeon [email protected] GHz | |
| GPU | Nvidia Titan X (Pascal) | |
| UGV 5 | Operating system | Kylin |
| Memory | DDR4 32 GB | |
| CPU | Phytium [email protected] GHz | |
| GPU | Cambricon MLU220 | |
| UAV 10 | Operating system | Kylin |
| Memory | DDR4 16 GB | |
| CPU | Intel i7 6700 K | |
| GPU | NVIDIA GeForce GTX 670 | |
| UGV (1-4)/UAV (1-9) | Operating system | Ubuntu18.04 OR Ubuntu20.04 |
| Memory | DDR4 16 GB | |
| CPU | ARM A78AE v8.2 | |
| GPU | NVIDIA Ampere architecture GPU with 64 Tensor Cores | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, X.; Yu, X.; Song, W.; Han, L.; Yang, T.; Li, Z.; Su, Z. A Software-Defined Distributed Architecture for Controlling Unmanned Swarm Systems. Electronics 2023, 12, 3739. https://doi.org/10.3390/electronics12183739
An X, Yu X, Song W, Han L, Yang T, Li Z, Su Z. A Software-Defined Distributed Architecture for Controlling Unmanned Swarm Systems. Electronics. 2023; 12(18):3739. https://doi.org/10.3390/electronics12183739
Chicago/Turabian StyleAn, Xuyang, Xuewei Yu, Weilong Song, Le Han, Tingting Yang, Zhaodong Li, and Zhibao Su. 2023. "A Software-Defined Distributed Architecture for Controlling Unmanned Swarm Systems" Electronics 12, no. 18: 3739. https://doi.org/10.3390/electronics12183739
APA StyleAn, X., Yu, X., Song, W., Han, L., Yang, T., Li, Z., & Su, Z. (2023). A Software-Defined Distributed Architecture for Controlling Unmanned Swarm Systems. Electronics, 12(18), 3739. https://doi.org/10.3390/electronics12183739