



An Improved Full-Speed Domain Sensorless Control Scheme for Permanent Magnet Synchronous Motor Based on Hybrid Position Observer and Disturbance Rejection Optimization


Abstract
:1. Introduction
2. Basic Mathematical Model of PMSM Sensorless System
2.1. Mathematical Model of PMSM
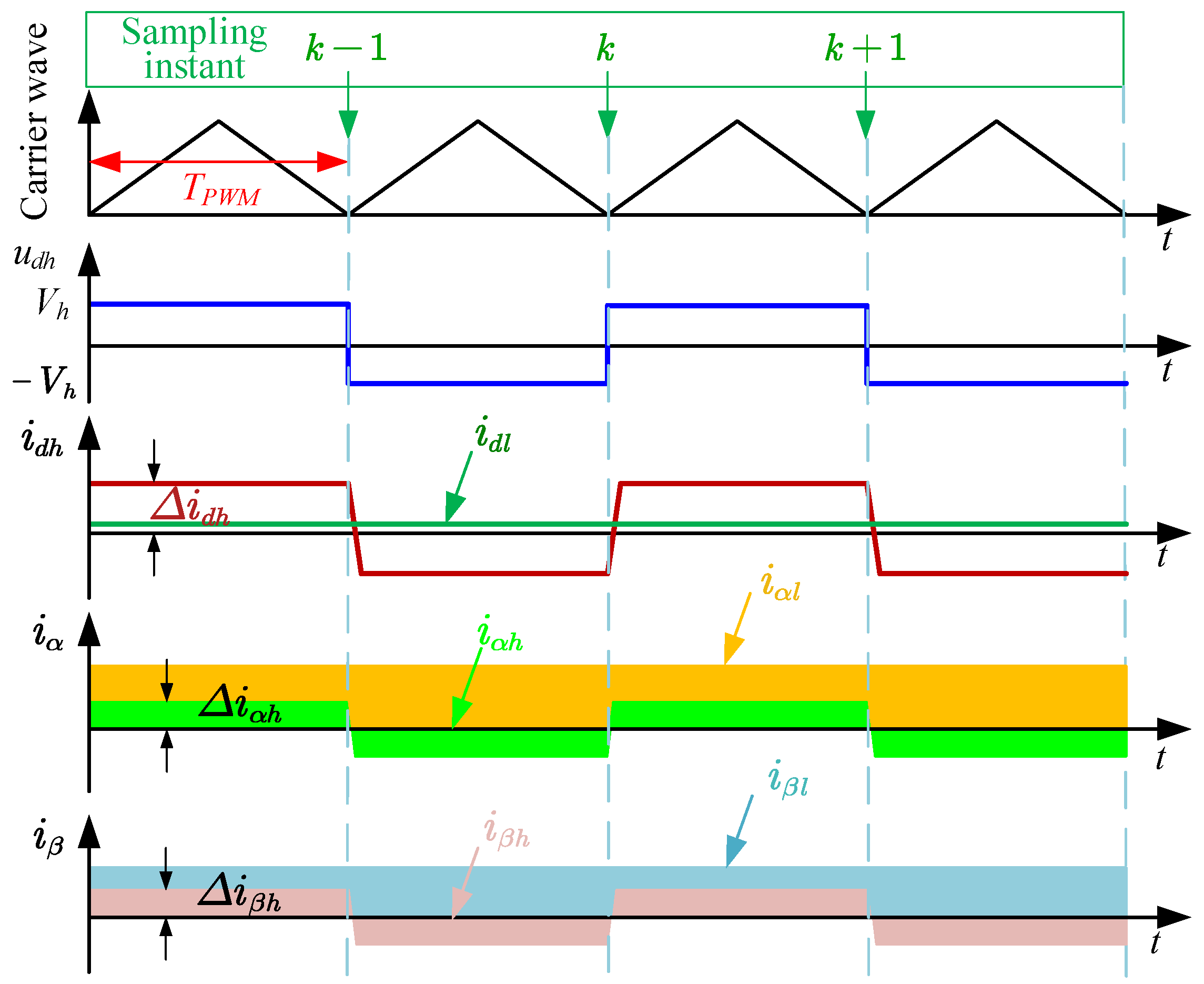
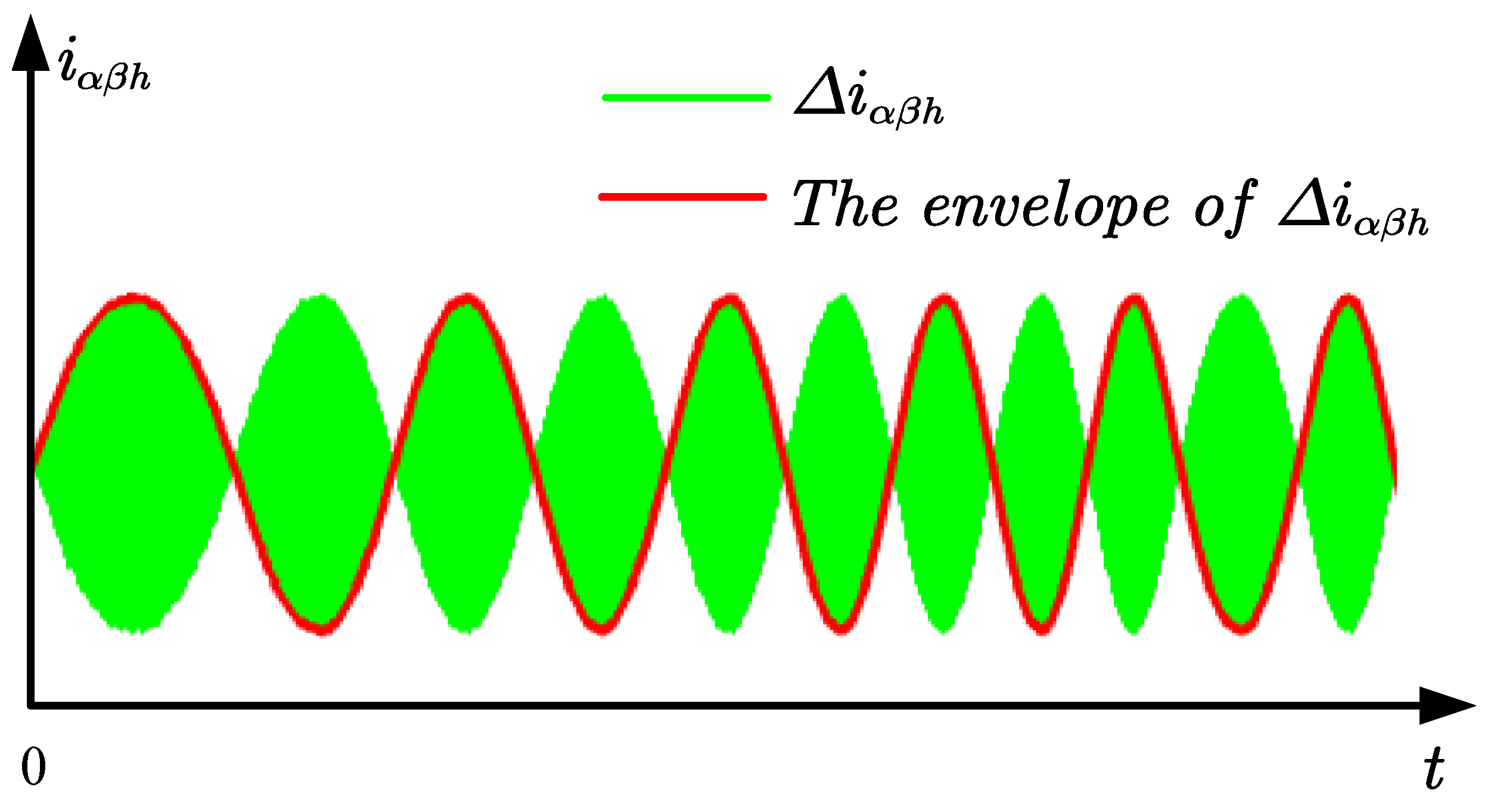
2.2. Mathematical Model of Square Wave HFI Observer
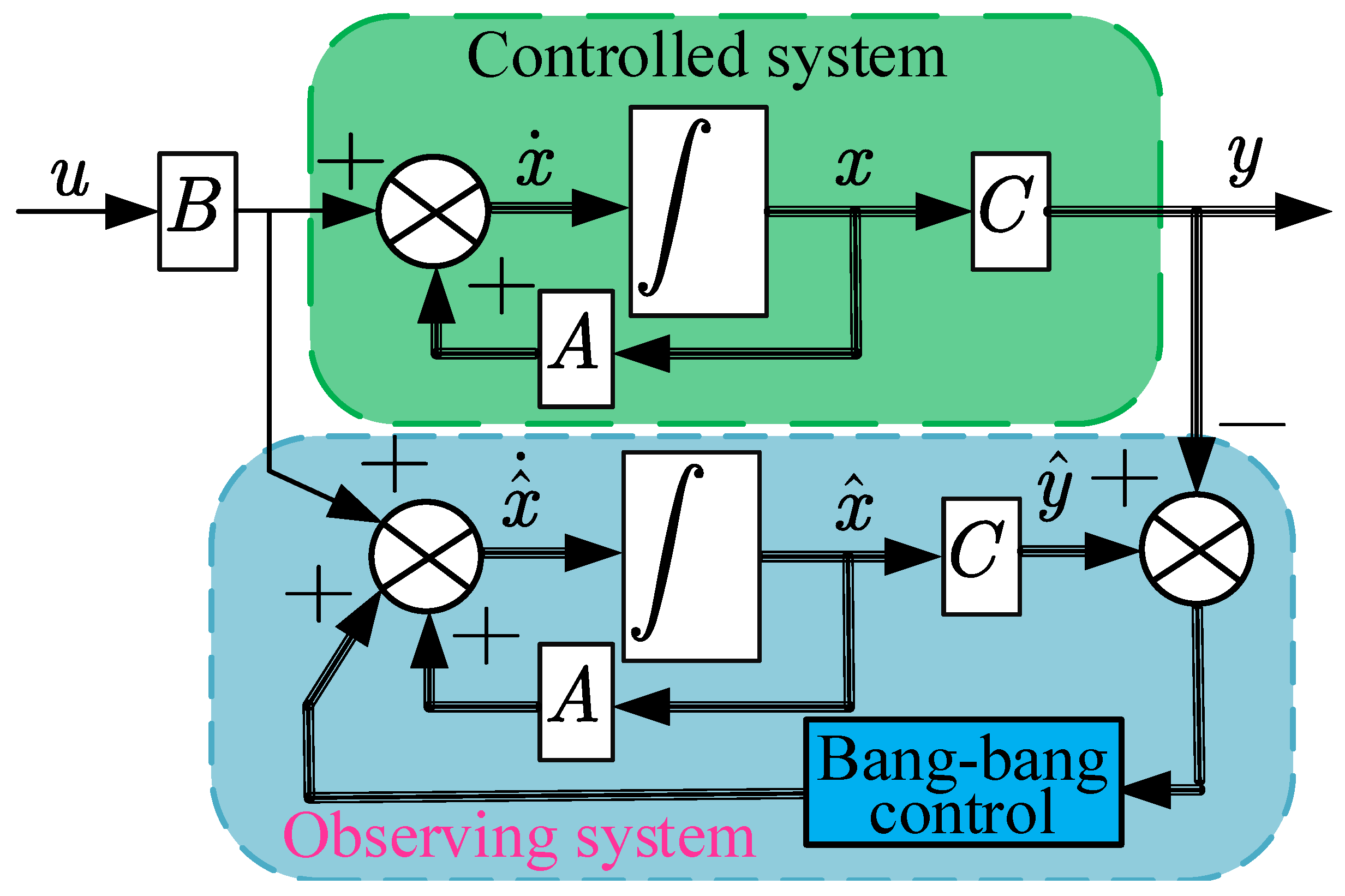
2.3. Mathematical Model of HSMO
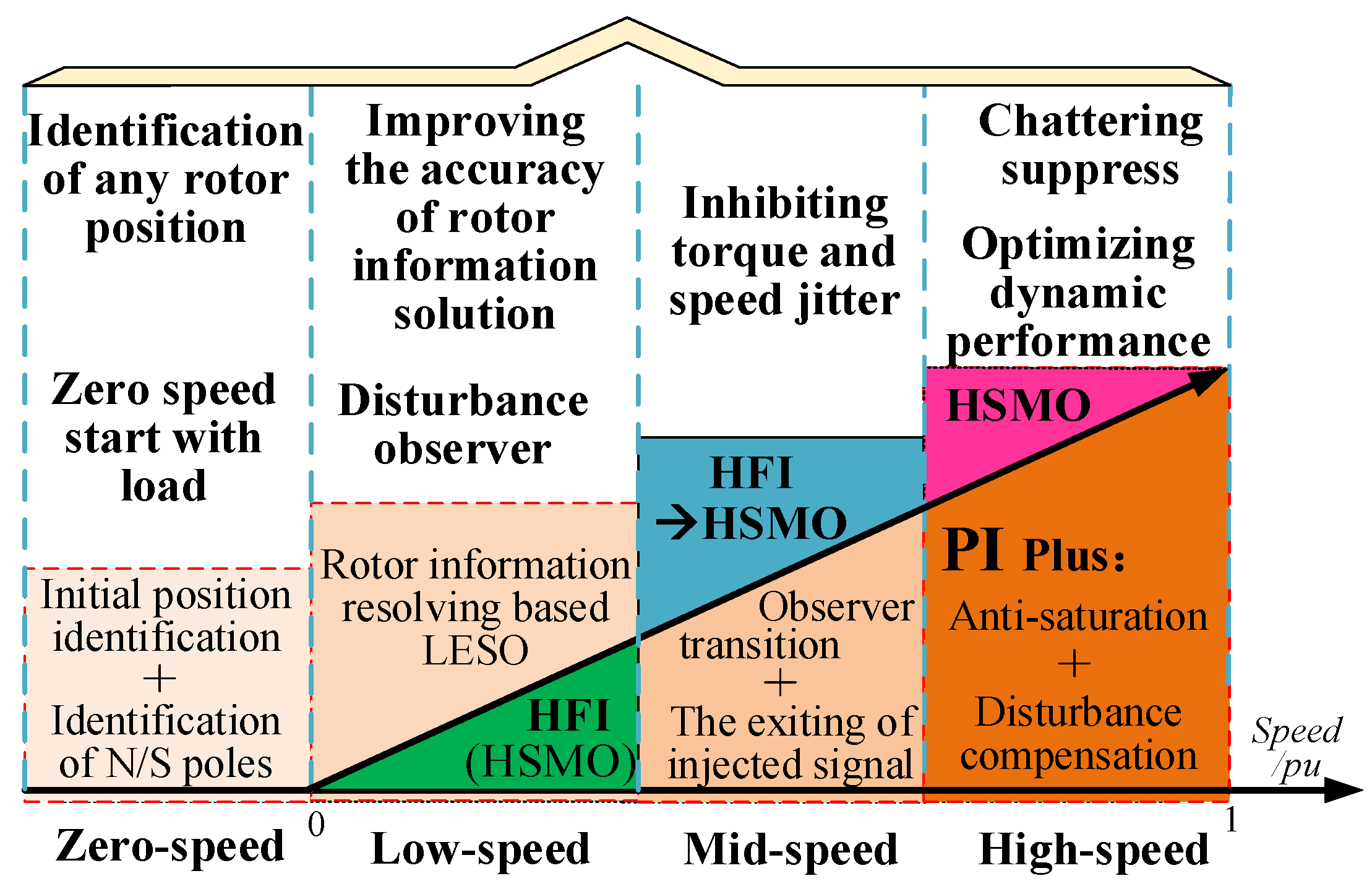
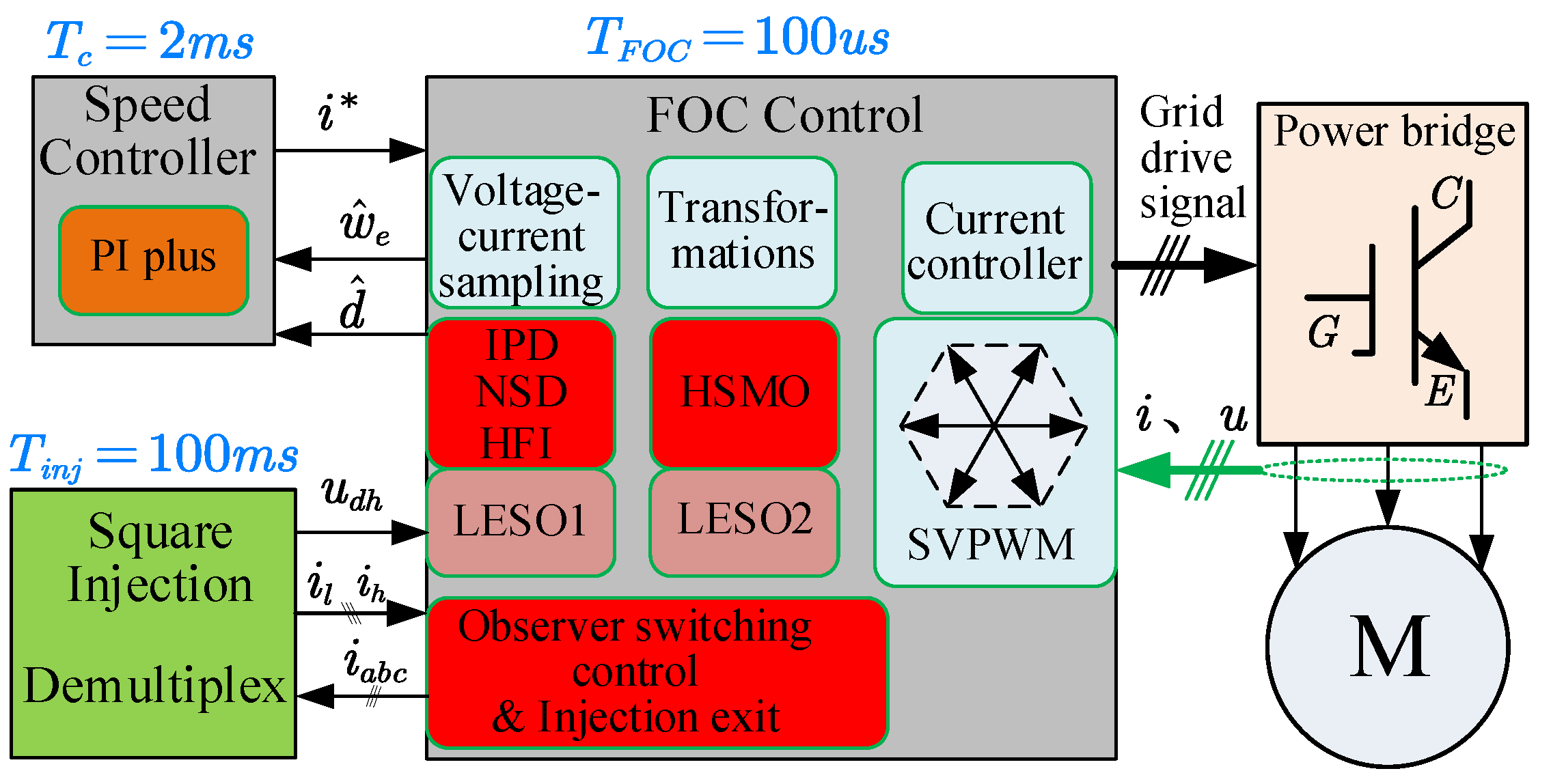
3. Proposed Full-Speed Domain Sensorless Scheme
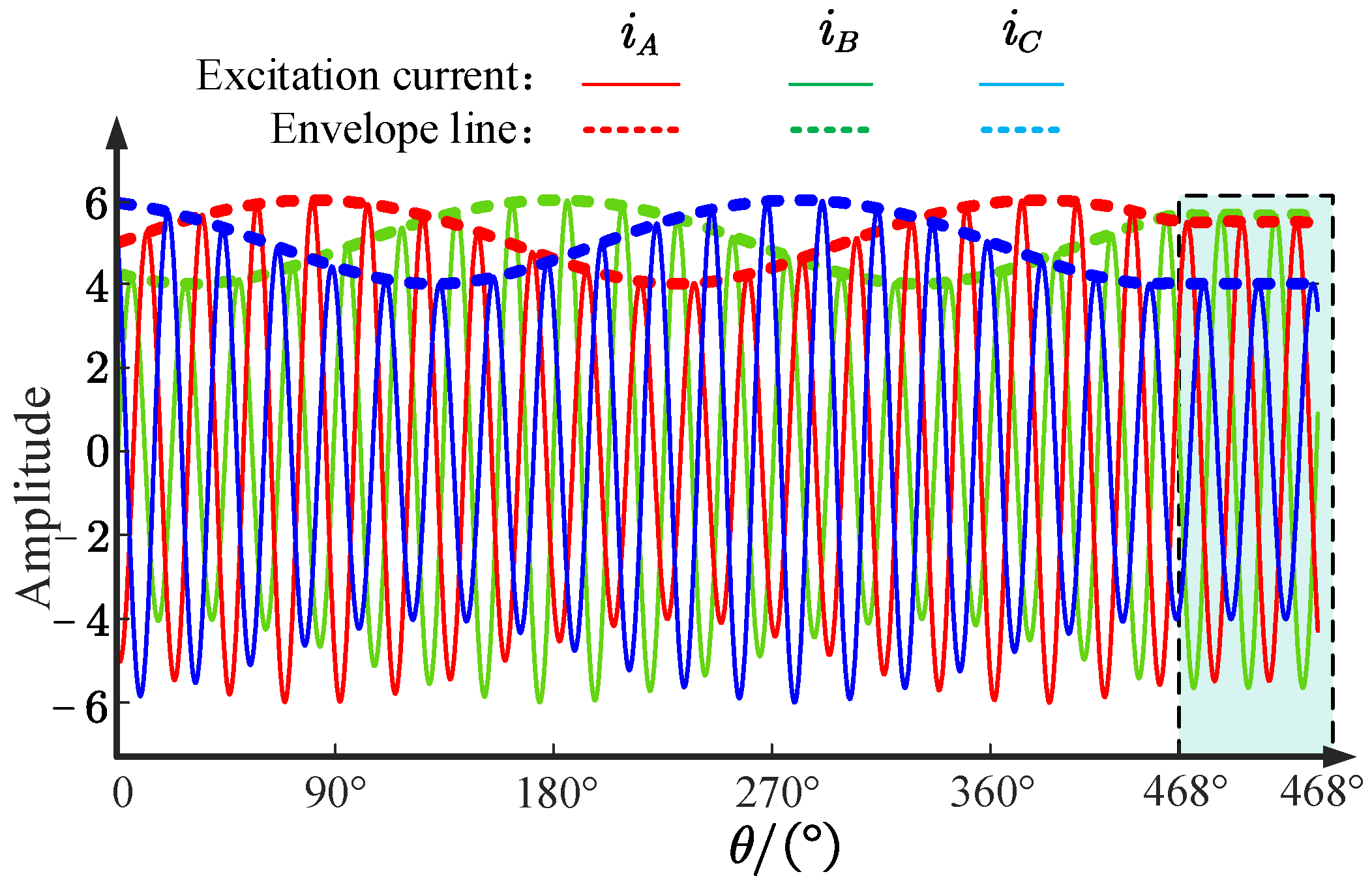
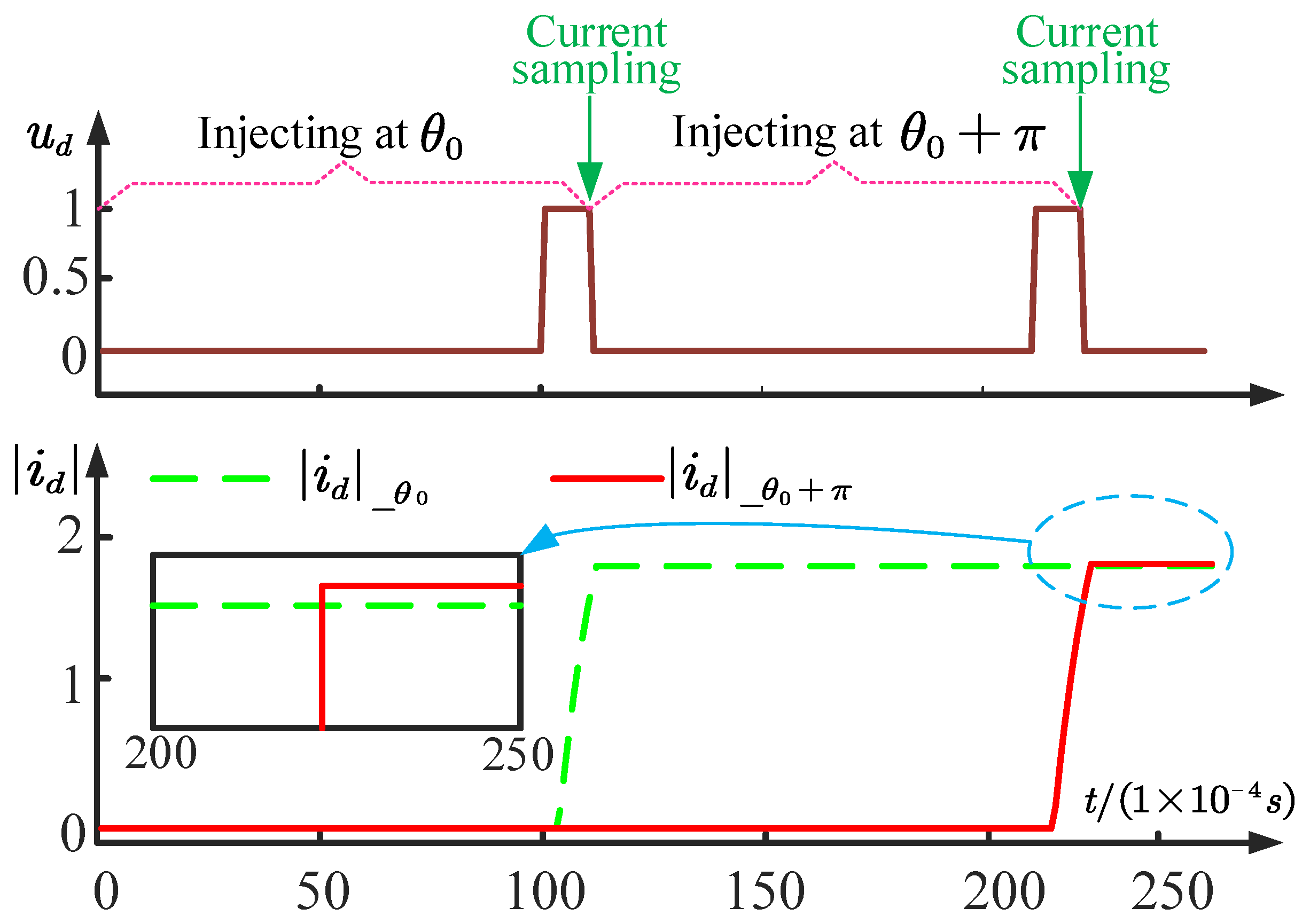
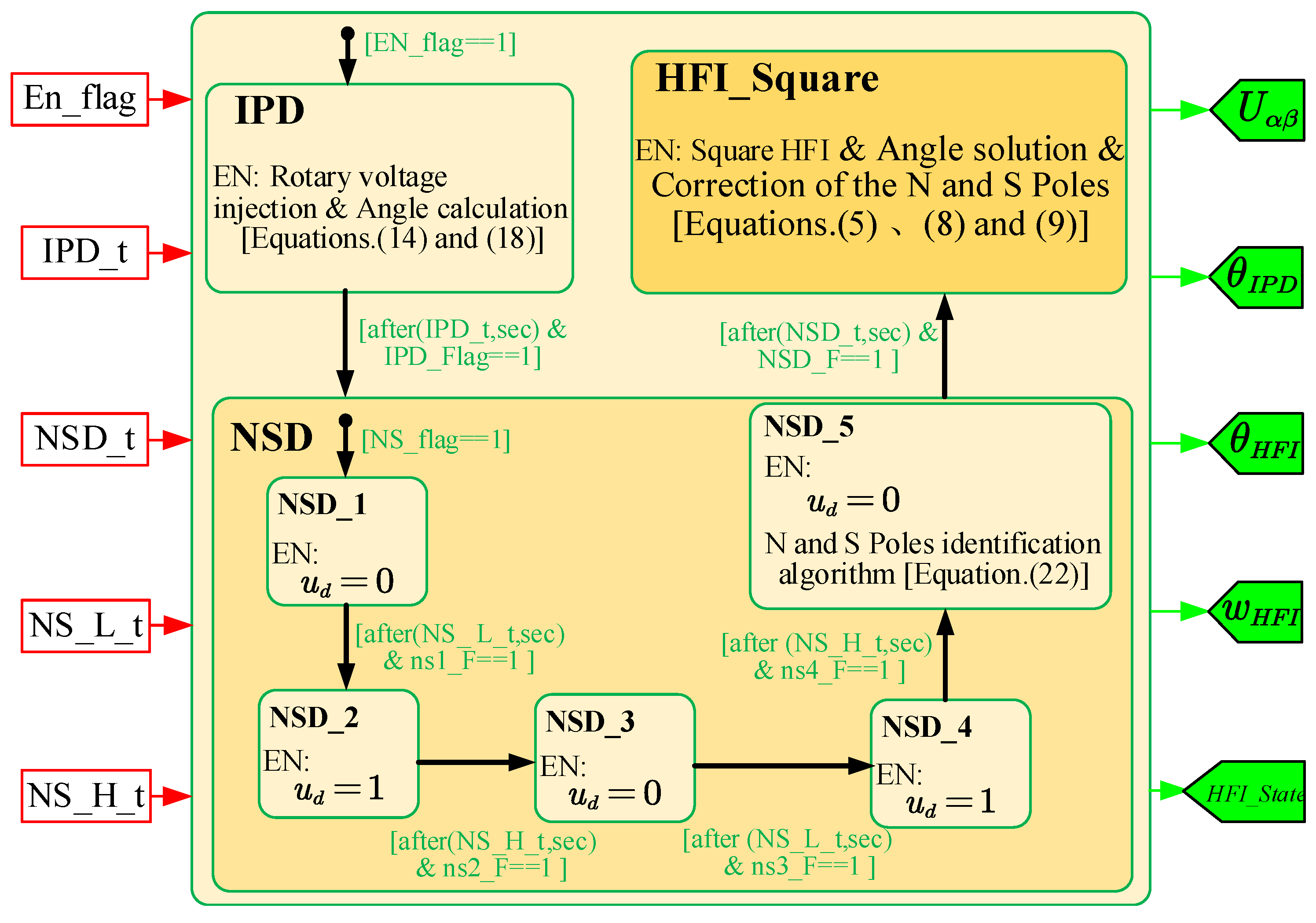
3.1. The Rotor Position Identification of Zero Speed
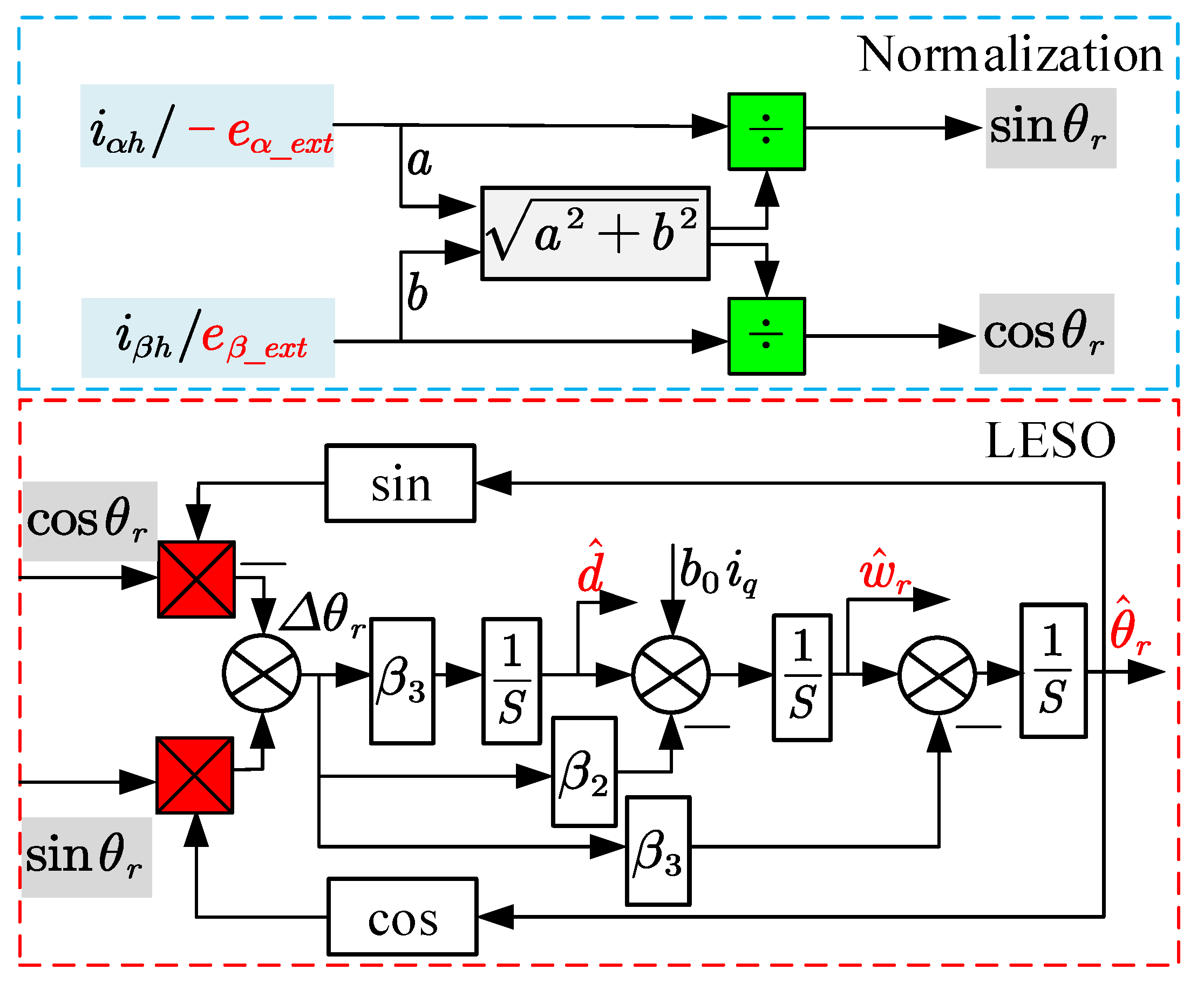
3.2. Calculation of Rotor Position and Speed in Low-Speed Range
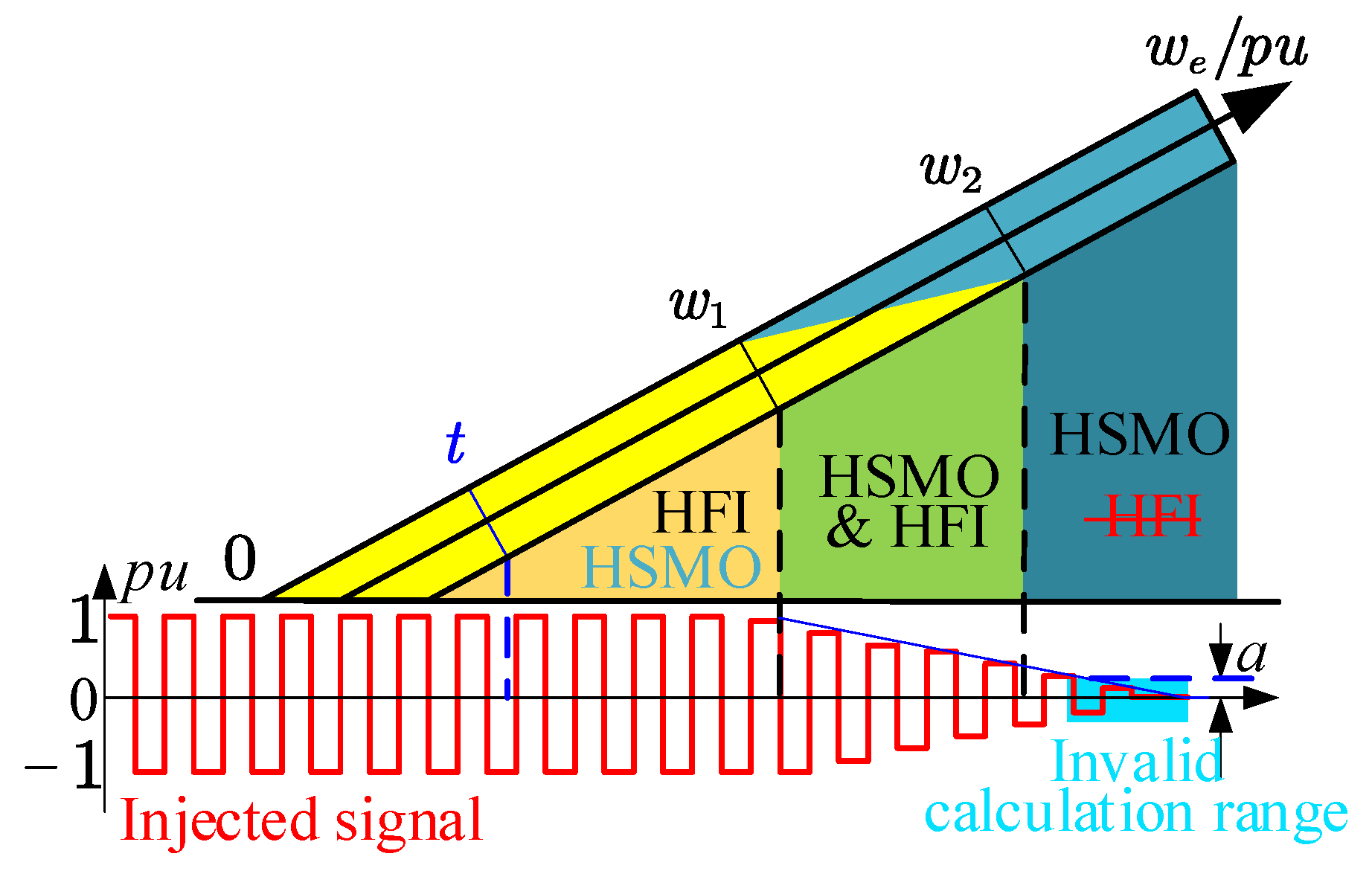
3.3. Smooth Transition Strategy in Medium-Speed Range
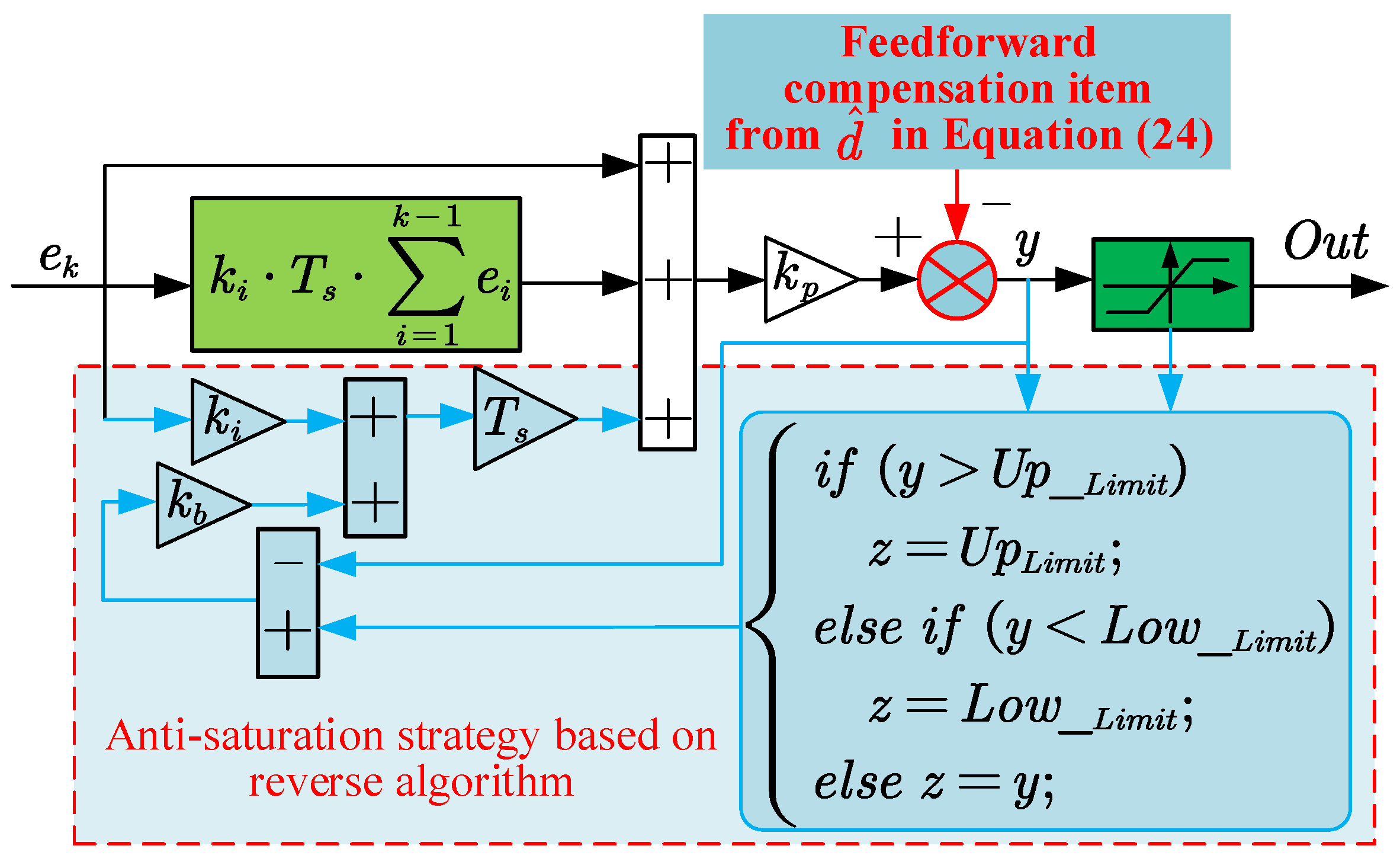
3.4. Optimization of System Anti-Disturbance Performance in High-Speed Range
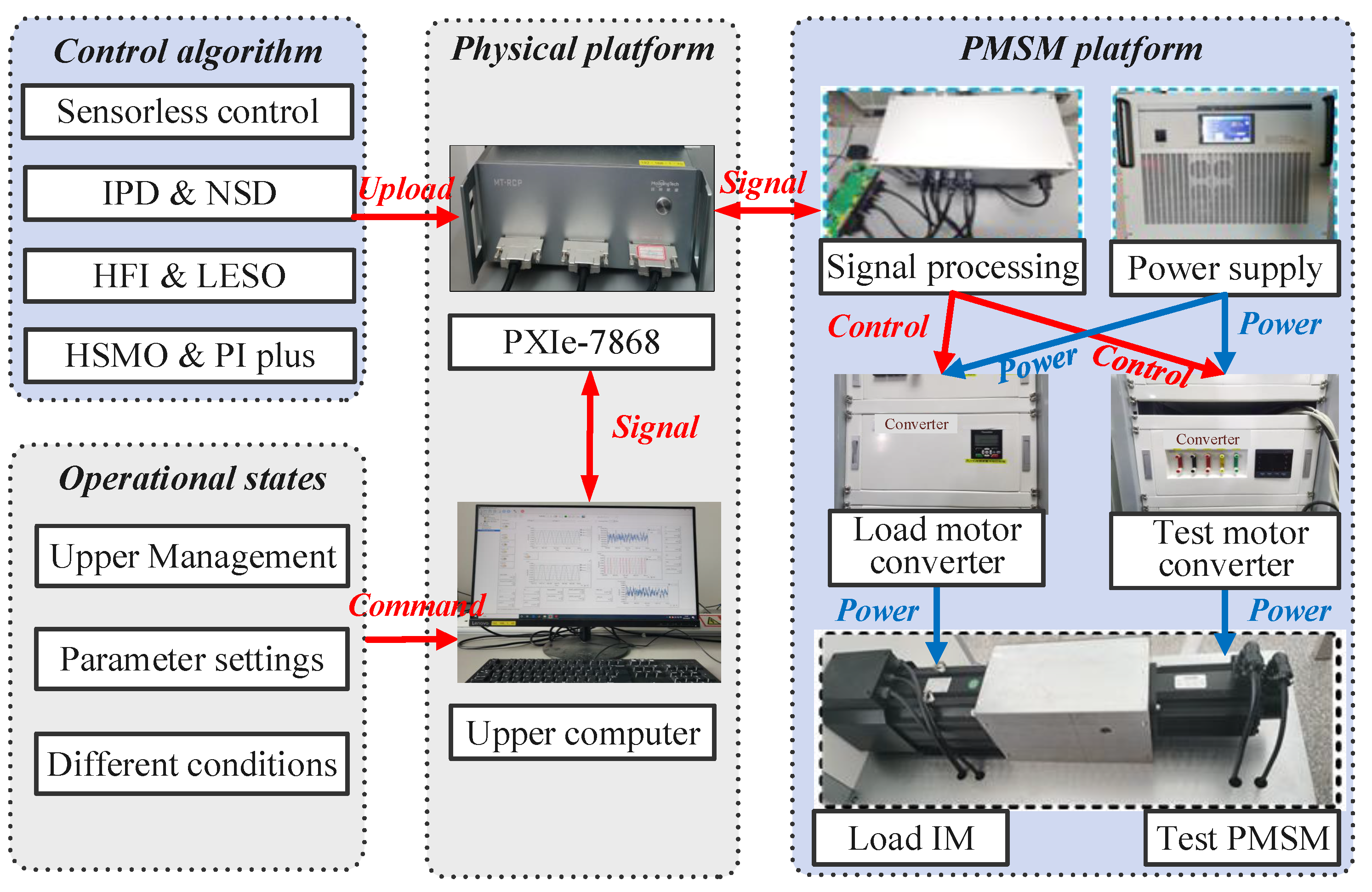
4. Experimental Verification
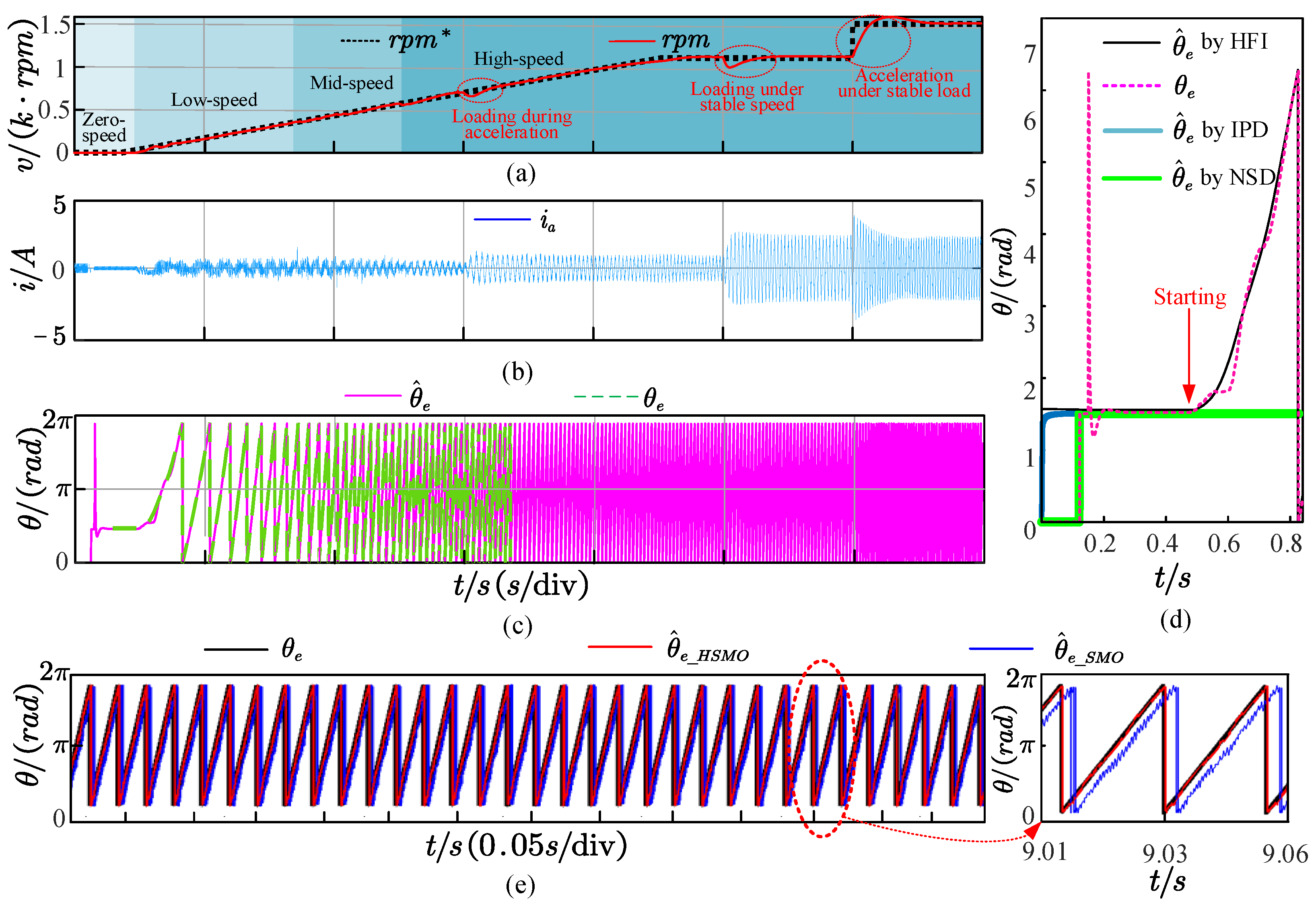
4.1. Speed Response Test in Full-Speed Threshold
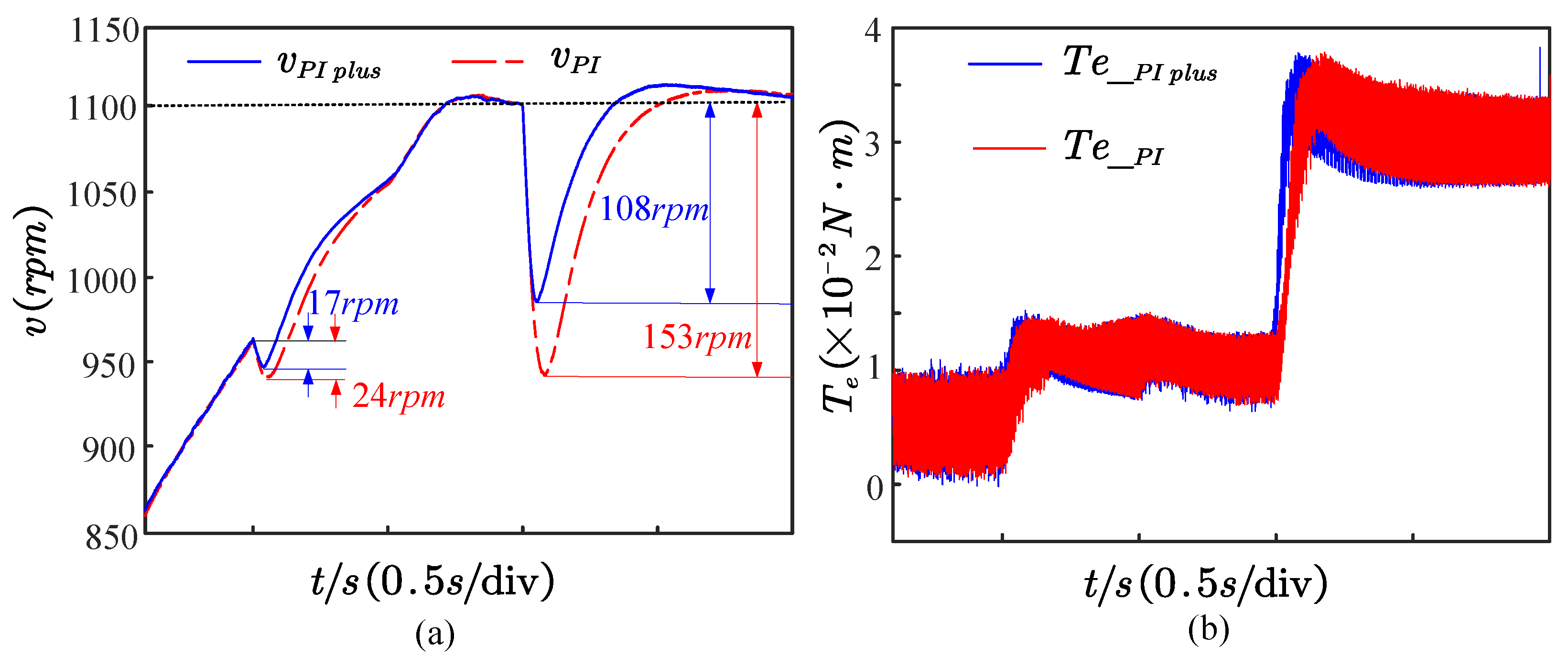
4.2. Anti-Load Disturbance Performance Test at High-Speed Threshold
5. Conclusions
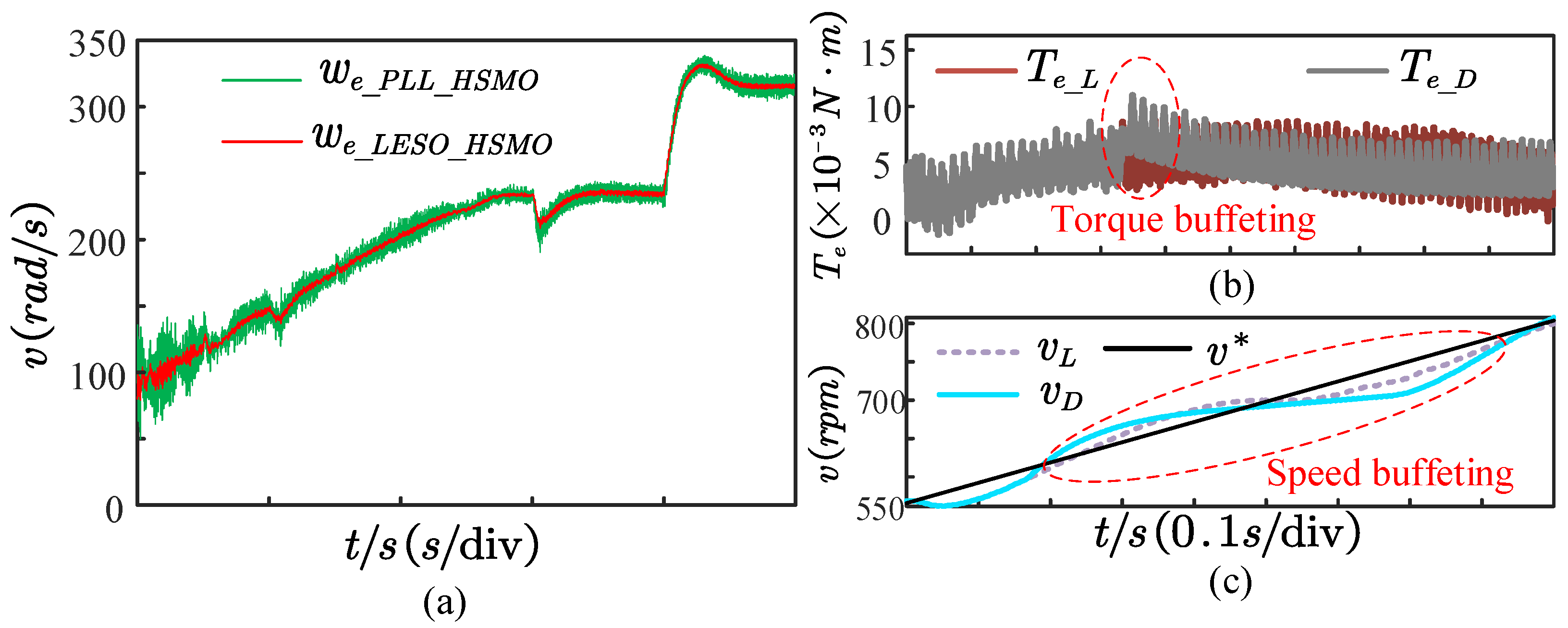
- In the aspect of rotor information estimation, an LESO is devised for rotor state observation and disturbance estimation. Experimental results demonstrate that LESO yields superior rotor speed identification performance compared to traditional PLL.
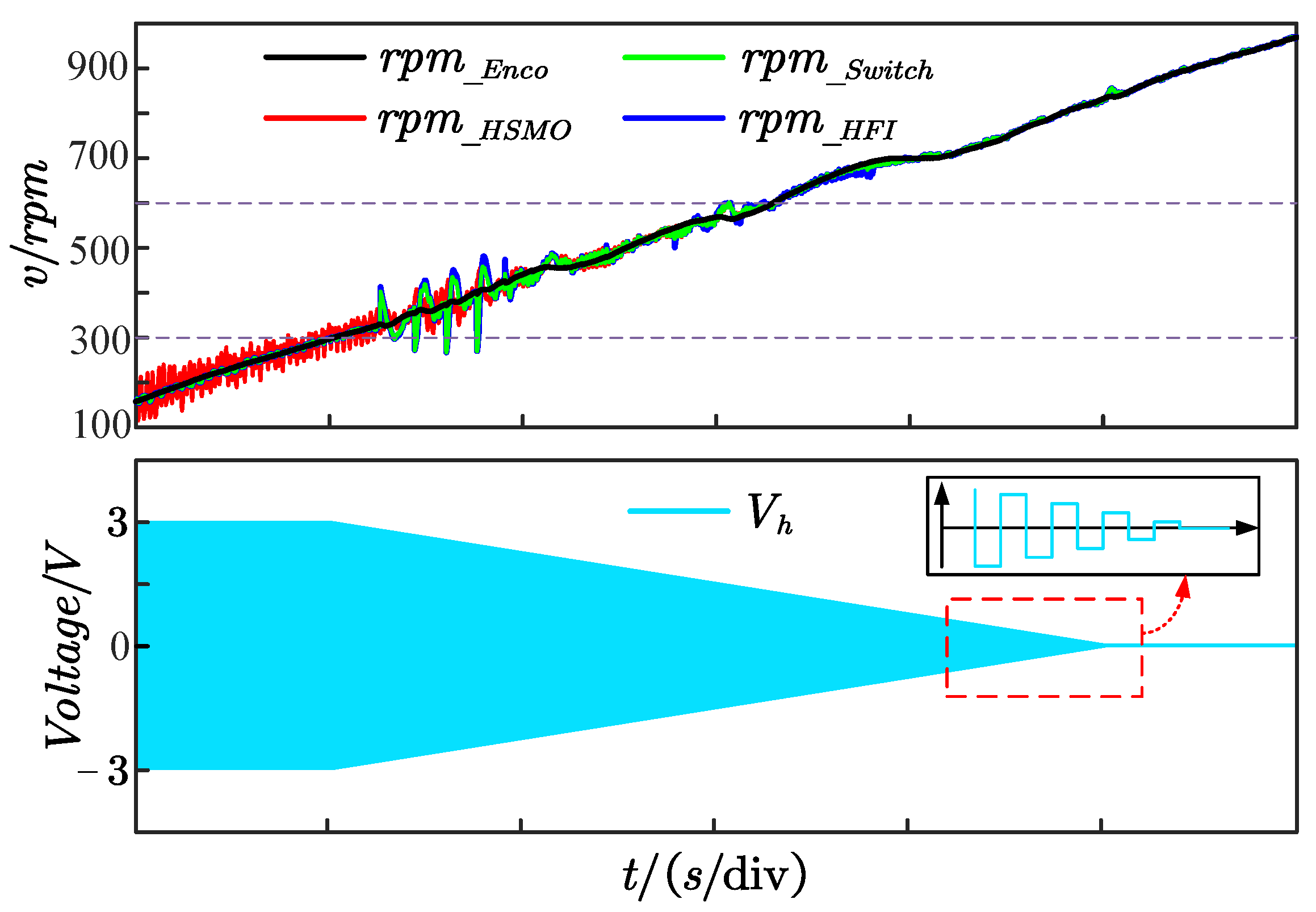
- At medium speed, a linear exit scheme based on an injection signal is designed, building upon linear weighted switching for observers. Experimental results prove that the proposed switching strategy can effectively suppress speed jitter.
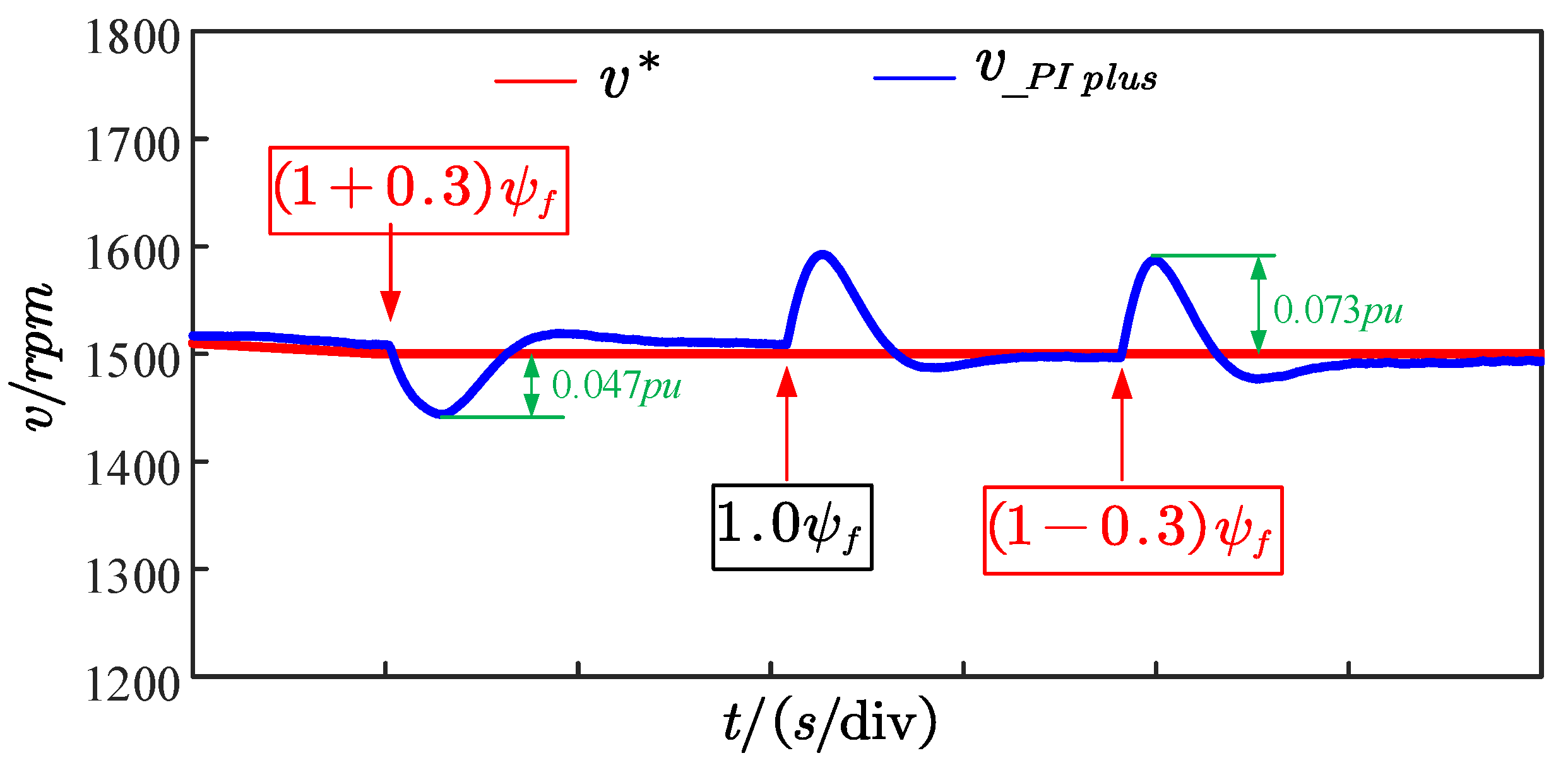
- During high speed, the robustness and disturbance rejection performance of the proposed sensorless estimation algorithm and designed controller are discussed, respectively. Parameter perturbation experiments show that the system only produces 0.047 pu and 0.073 pu speed fluctuations when is disturbed with ±0.3 pu, respectively. Load disturbance experiments indicate that the proposed speed controller can be reduced by 45 rpm for speed fluctuations with a load of 0.02 in comparison to a PI. Simultaneously, it achieves a faster torque response. In conclusion, the proposed sensorless control system is capable of achieving a seamless transition process, along with excellent robustness and disturbance rejection performance throughout the entire operational range.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PMSM | Permanent Magnet Synchronous Motor |
| IPMSM | Interior Permanent Magnet Synchronous Motor |
| SPMSM | Surface Permanent Magnet Synchronous Motor |
| SMO | Sliding Mode Observer |
| HSMO | Higher order Sliding Mode Observer |
| HFI | High Frequency signal Injection |
| LESO | Linear Extended State Observer |
| EKF | Extended Kalman Filter |
| LPF | Low Pass Filter |
| back EMF | back ElectroMotive Force |
| IPD | Initial Position Detection |
| NSD | NS Detection |
References
- Wang, G.; Valla, M.; Solsona, J. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Khanh, P.Q.; Anh, H.P.H. Novel Sensorless PMSM Speed Control Using Advanced Fuzzy MRAS Algorithm. Arab. J. Sci. Eng. 2022, 47, 14531–14542. [Google Scholar] [CrossRef]
- Varatharajan, A.; Pellegrino, G.; Armando, E.; Hinkkanen, M. Sensorless Synchronous Motor Drives: A Review of Flux Observer-Based Position Estimation Schemes Using the Projection Vector Framework. IEEE Trans. Power Electron. 2021, 36, 8171–8180. [Google Scholar] [CrossRef]
- Hwang, C.-E.; Lee, Y.; Sul, S.K. Analysis on Position Estimation Error in Position-Sensorless Operation of IPMSM Using Pulsating Square Wave Signal Injection. IEEE Trans. Power Electron. 2019, 55, 458–470. [Google Scholar] [CrossRef]
- Bao, D.; Wu, H.; Wang, R.; Zhao, F.; Pan, X. Full-Order Sliding Mode Observer Based on Synchronous Frequency Tracking Filter for High-Speed Interior PMSM Sensorless Drives. Energies 2020, 13, 6511. [Google Scholar] [CrossRef]
- Shahzad, K.; Jawad, M.; Ali, K.; Akhtar, J.; Khosa, I.; Bajaj, M.; Elattar, E.E.; Kamel, S. A Hybrid Approach for an Efficient Estimation and Control of Permanent Magnet Synchronous Motor with Fast Dynamics and Practically Unavailable Measurements. Appl. Sci. 2022, 12, 4958. [Google Scholar] [CrossRef]
- Zhu, Y.; Tao, B.; Xiao, M.; Yang, G.; Zhang, X.; Lu, K. Luenberger Position Observer Based on Deadbeat-Current Predictive Control for Sensorless PMSM. Electronics 2020, 9, 1325. [Google Scholar] [CrossRef]
- Mai, Z.; Xiao, F.; Fu, K.; Liu, J.; Lian, C.; Li, K.; Zhang, W. HF Pulsating Carrier Voltage Injection Method Based on Improved Position Error Signal Extraction Strategy for PMSM Position Sensorless Control. IEEE Trans. Power Electron. 2021, 36, 9348–9360. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Xu, W. A High Precision Initial Position Estimation Method for Low Saliency Ratio Machine Based on Image Tracking. IEEE Trans. Power Electron. 2023, 1–13. [Google Scholar] [CrossRef]
- Yeh, H.-C.; Yang, S.-M. Phase Inductance and Rotor Position Estimation for Sensorless Permanent Magnet Synchronous Machine Drives at Standstill. IEEE Access 2021, 9, 32897–32907. [Google Scholar] [CrossRef]
- Li, T.; Wang, Z.; Li, M.; Wang, D.; Kong, H. A Whole Speed Range Sensorless Method for SPMSM Drive. In Proceedings of the 2022 China Automation Congress (CAC), Xiamen, China, 25–27 November 2022; pp. 1549–1553. [Google Scholar] [CrossRef]
- Zhang, Z. Sensorless Back EMF Based Control of Synchronous PM and Reluctance Motor Drives—A Review. IEEE Trans. Power Electron. 2022, 37, 10290–10305. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H.; Yang, S.; Ma, M. Improv. Improved Initial Rotor Position Estimation for PMSM Drives Based on HF Pulsating Voltage Signal Injection. IEEE Trans. Ind. Electron. 2018, 65, 4702–4713. [Google Scholar] [CrossRef]
- Nair, S.V.; Hatua, K.; Durga Prasad, N.V.P.R.; Reddy, D.K. Quick and Seamless Transition Method for I-f to Sensorless Vector Control Changeover and on-the-fly Start of PMSM Drives. IET Electr. Power Appl. 2020, 14, 2231–2242. [Google Scholar] [CrossRef]
- Vidlak, M.; Makys, P.; Gorel, L. A Novel Constant Power Factor Loop for Stable V/f Control of PMSM in Comparison against Sensorless FOC with Luenberger-Type Back-EMF Observer Verified by Experiments. Appl. Sci. 2022, 12, 9179. [Google Scholar] [CrossRef]
- Yousefi-Talouki, A.; Pescetto, P.; Pellegrino, G.; Boldea, I. Combined Active Flux and High-Frequency Injection Methods for Sensorless Direct-Flux Vector Control of Synchronous Reluctance Machines. IEEE Trans. Power Electron. 2017, 33, 2447–2457. [Google Scholar] [CrossRef]
- Liu, J.; Chen, J. A Changeover of Rotor Position Estimation between Rotor Speed Adaptive Stator Flux Observer and High-frequency Injection and Dead-Time Compensation Scheme for Sensorless Vector Control System of PMSM. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Ding, H.; Zou, X.; Li, J. Sensorless Control Strategy of Permanent Magnet Synchronous Motor Based on Fuzzy Sliding Mode Observer. IEEE Access 2022, 10, 36743–36752. [Google Scholar] [CrossRef]
- Bist, A.; Jadhav, S. Sensorless Control based on Sliding Mode Observer for PMSM drive. In Proceedings of the 2020 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Jaipur, India, 16–19 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Dendouga, A. Conventional and Second Order Sliding Mode Control of Permanent Magnet Synchronous Motor Fed by Direct Matrix Converter: Comparative Study. Energies 2020, 13, 5093. [Google Scholar] [CrossRef]
- Zhan, Y.; Guan, J.; Zhao, Y. An adaptive second-order sliding-mode observer for permanent magnet synchronous motor with an improved phase-locked loop structure considering speed reverse. Trans. Inst. Meas. Control 2020, 42, 1008–1021. [Google Scholar] [CrossRef]
- Wu, T.; Luo, D.; Wu, X.; Liu, K.; Huang, S.; Peng, X. Square-Wave Voltage Injection Based PMSM Sensorless Control Considering Time Delay at Low Switching Frequency. IEEE Trans. Ind. Electron. 2021, 69, 5525–5535. [Google Scholar] [CrossRef]
- Wu, C.; Chen, Z.; Chen, Q. Hybrid-Modulation-Based Full-Speed Sensorless Control for Permanent Magnet Synchronous Motors. IEEE Trans. Power Electron. 2022, 37, 5908–5917. [Google Scholar] [CrossRef]
- Ning, B.; Zhao, Y.; Cheng, S. An Improved Sensorless Hybrid Control Method of Permanent Magnet Synchronous Motor Based on I/F Startup. Sensors 2023, 23, 635. [Google Scholar] [CrossRef] [PubMed]
- Cui, W.; Zhang, S.; Feng, Y. Improved sensorless control scheme for PMSM based on high-frequency square-wave voltage injection considering non-linear change of inductance in D-Q axis. AIP Adv. 2021, 11, 015121. [Google Scholar] [CrossRef]
- Liu, L.; Jin, D.; Si, J.; Liang, D. A Novel Nonsingular Fast Terminal Sliding Mode Observer Combining I-F Method for Wide-Speed Sensorless Control of PMSM Drives. IET Power Electron. 2023, 16, 843–855. [Google Scholar] [CrossRef]
- Hou, Q.; Ding, S.; Yu, X. Composite Super-Twisting Sliding Mode Control Design for PMSM Speed Regulation Problem Based on a Novel Disturbance Observer. IEEE Trans. Energy Convers. 2021, 36, 2591–2599. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Refs | Contributions | Limitations |
|---|---|---|
| Bao D. (2020) [5] | Proposed a full-order SMO to inhibit harmonic influence of inverter nonlinearity | 1. Low speed is unreliable. 2. Zero speed is not convergent for PMSM. |
| Shahzad K. (2022) [6] | Proposed a sensorless control scheme combining MPC and EKF | 1. The calculation is complex. 2. The computing power of MCU is high. |
| Zhu Y. (2020) [7] | Proposed a sensorless control scheme by combining Luenberger observer and deadbeat-current predictive control | 1. The observer is sensitive to model parameters. 2. The reliability of rotor information identification is affected by signal-to-noise ratio. |
| Z. Mai (2021) [8] | An improved position error signal extraction strategy based on amplitude observer was designed on the basis of pulse vibration high-frequency injection | 1. The identification accuracy is affected by the nonlinearity of the inverter. 2. LPF brings phase lag. |
| H. Wang (2023) [9] | Proposed an estimation method for rotor position using image tracking and HFI | Large amount of calculation and high hardware cost |
| H.-C. Yeh [10] | Line-to-line voltage injection and voltage injection for IPD | It is better to consider extending the application speed threshold |
| T. Li (2022) [11] | A hybrid observer model and a linear weighted switching method were proposed | Chattering caused by injected signals and SMO deserves further attention |
| Our work | A hybrid observer model, a linear weighted switching method, a linear exit scheme for the injected signal, disturbance compensation | This scheme deserves further study |
| Parameters | Values | Parameters | Values | Parameters | Values |
|---|---|---|---|---|---|
| 0.405 | 0.45 mH | 0.4 mH | |||
| 0.00529 | 2 | J | 5 | ||
| B | 0.0001 | 1500 rpm | 400 | ||
| 70 | 8 | 13.8 | |||
| 90 | 70 | 0.35 | |||
| 615 | 500 Hz | 0.1 s | |||
| 0.05 s | 0.001 s | 10 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Zhao, M.; Wang, Y.; Zhang, H.; Lu, M. An Improved Full-Speed Domain Sensorless Control Scheme for Permanent Magnet Synchronous Motor Based on Hybrid Position Observer and Disturbance Rejection Optimization. Electronics 2023, 12, 3759. https://doi.org/10.3390/electronics12183759
Huang Y, Zhao M, Wang Y, Zhang H, Lu M. An Improved Full-Speed Domain Sensorless Control Scheme for Permanent Magnet Synchronous Motor Based on Hybrid Position Observer and Disturbance Rejection Optimization. Electronics. 2023; 12(18):3759. https://doi.org/10.3390/electronics12183759
Chicago/Turabian StyleHuang, Yi, Mi Zhao, Yunong Wang, Hong Zhang, and Min Lu. 2023. "An Improved Full-Speed Domain Sensorless Control Scheme for Permanent Magnet Synchronous Motor Based on Hybrid Position Observer and Disturbance Rejection Optimization" Electronics 12, no. 18: 3759. https://doi.org/10.3390/electronics12183759
APA StyleHuang, Y., Zhao, M., Wang, Y., Zhang, H., & Lu, M. (2023). An Improved Full-Speed Domain Sensorless Control Scheme for Permanent Magnet Synchronous Motor Based on Hybrid Position Observer and Disturbance Rejection Optimization. Electronics, 12(18), 3759. https://doi.org/10.3390/electronics12183759