
An AIoT-Based Assistance System for Visually Impaired People
 ,
,
Abstract
:1. Introduction
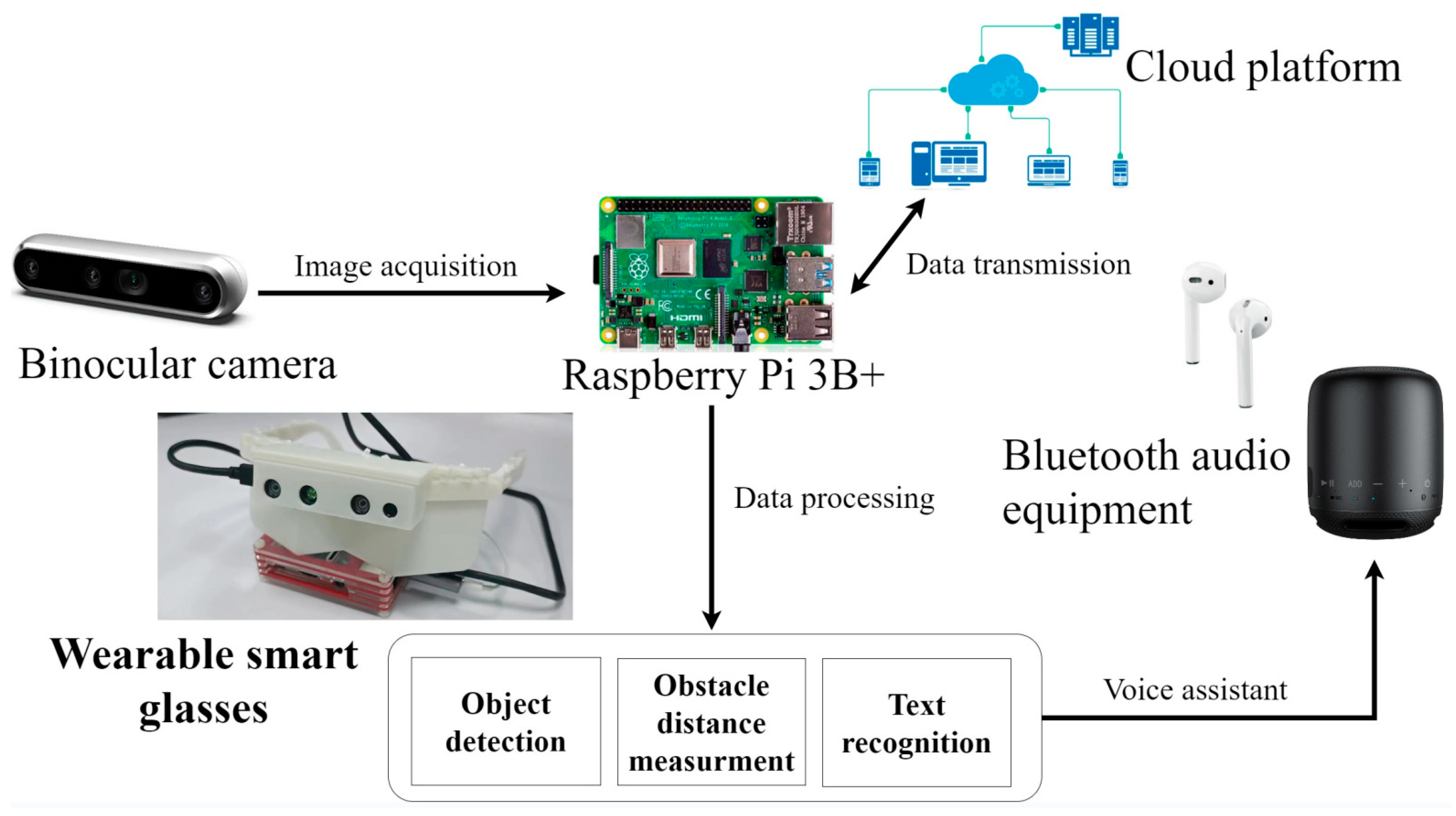
- To enhance the perceptual capabilities of visually impaired people, the proposed wearable smart glasses can accomplish real-time object detection, obstacle distance measurement, and text recognition. Additionally, the incorporation of a voice assistant enables the presentation of relevant information. The experiments demonstrate the convenience of such functions in facilitating them to acquire pertinent information about their surroundings.
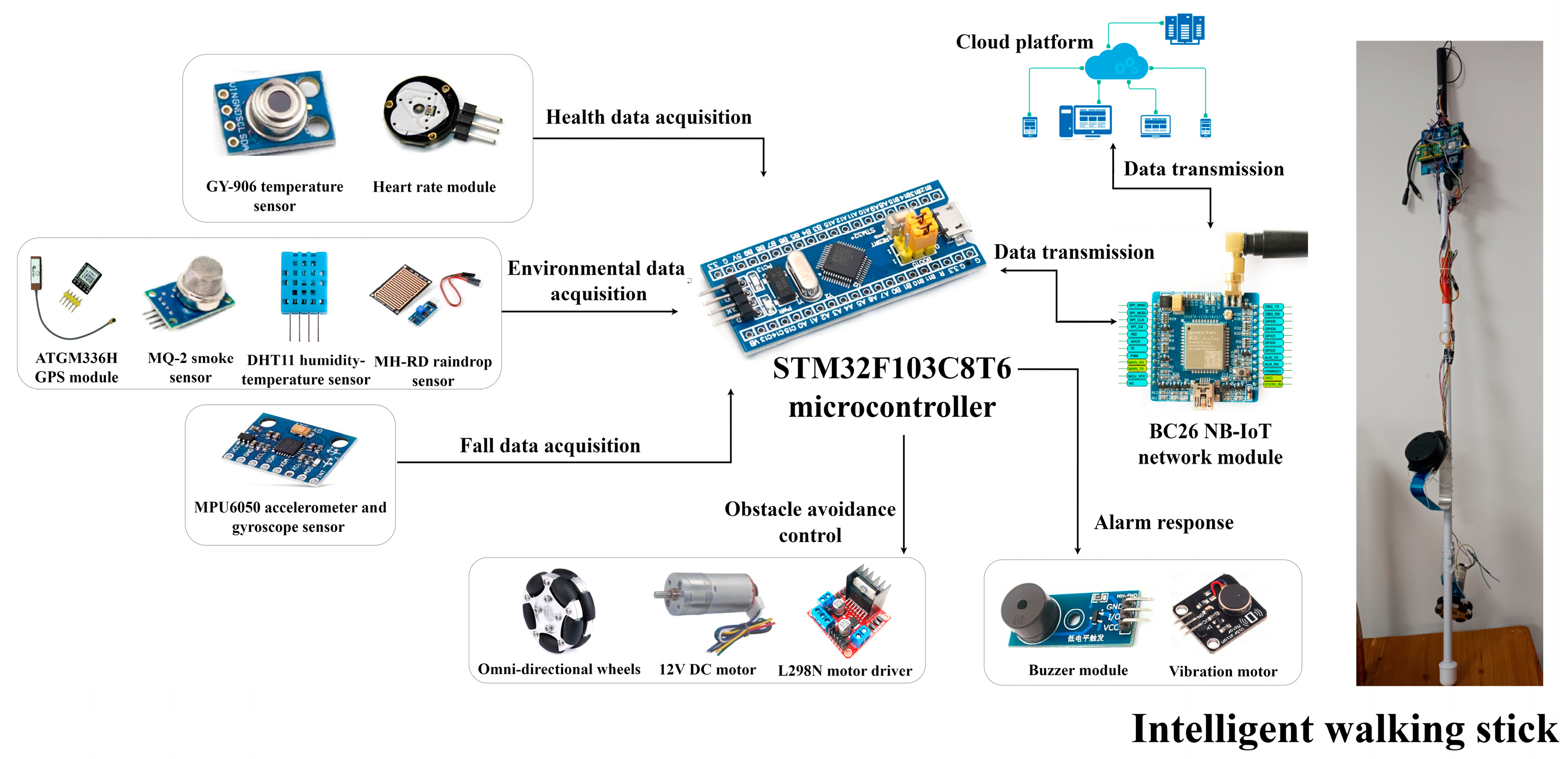
- Compared to the existing prototypes, the proposed intelligent walking stick is equipped with healthcare surveillance of heart rate detection and body temperature measurement, fulfilling the daily needs of visually impaired people to monitor their health conditions. In addition, fall detection and humidity-temperature monitoring are performed to enhance mobility. Meanwhile, obstacle avoidance control and alarm response are achieved in the corresponding cases. The experiments disclose the usefulness of such incorporated functions in ensuring safety.
- The assistance system aims to be low-cost, which relies on a Raspberry Pi 3B+ and STM32F103C8T6 microcontroller, along with diverse low-cost sensors and modules connected by the AIoT. The total hardware cost is approximately $66.8, providing a low-cost solution to design relevant systems in this field.
2. Related Work
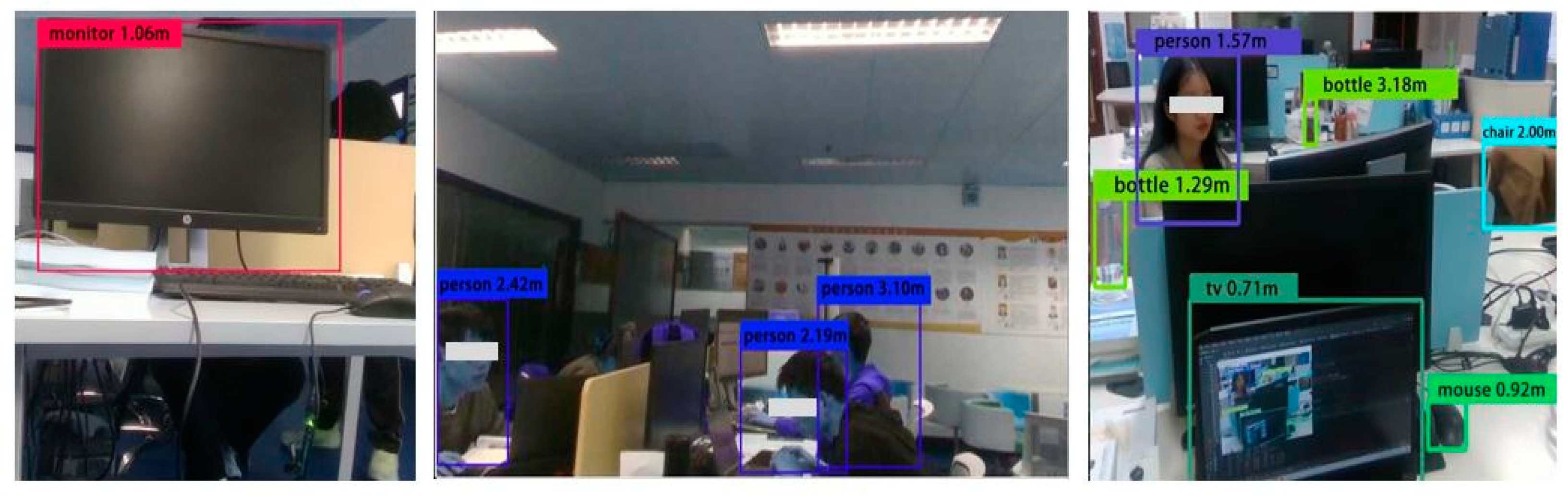
2.1. Object Detection
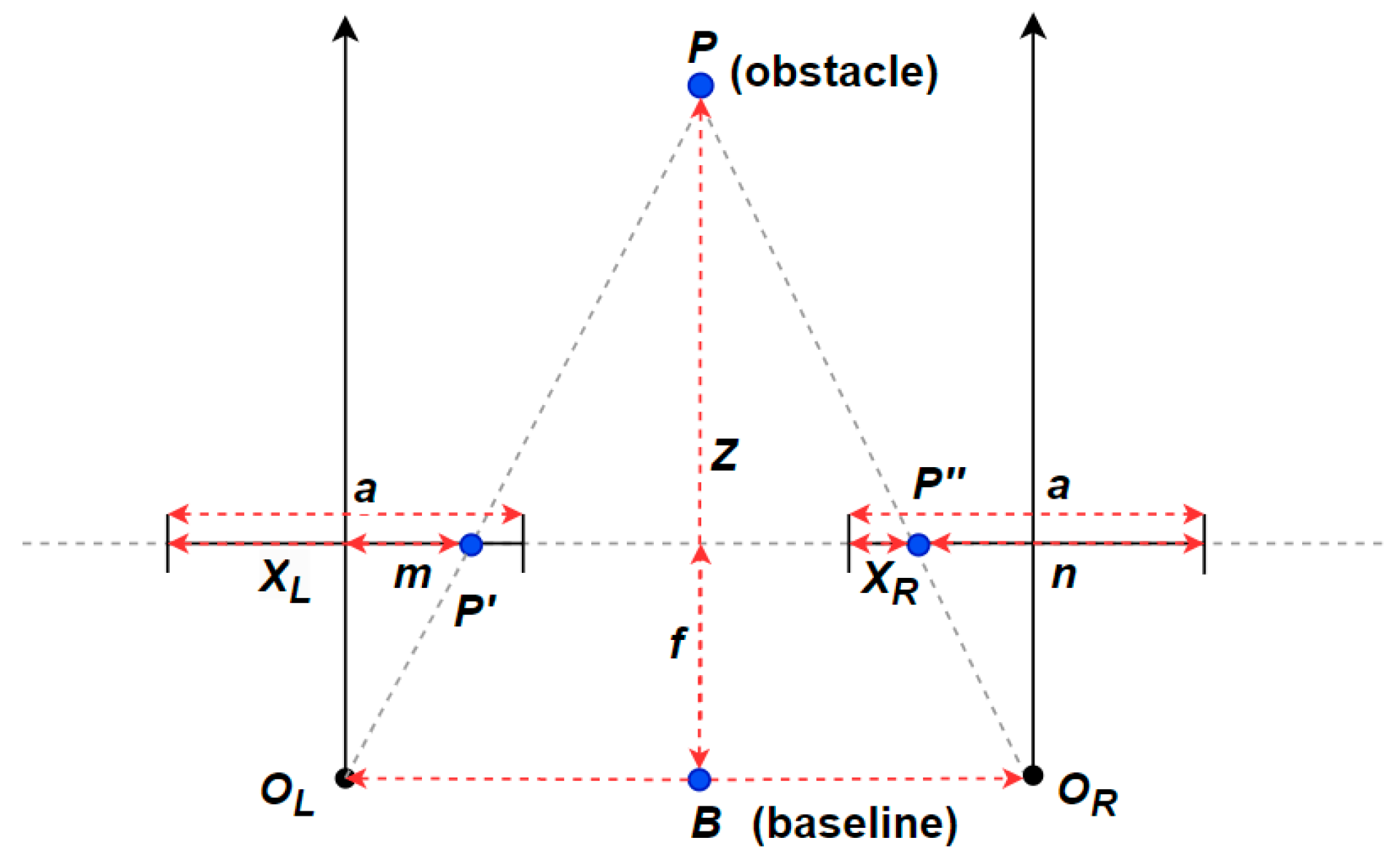
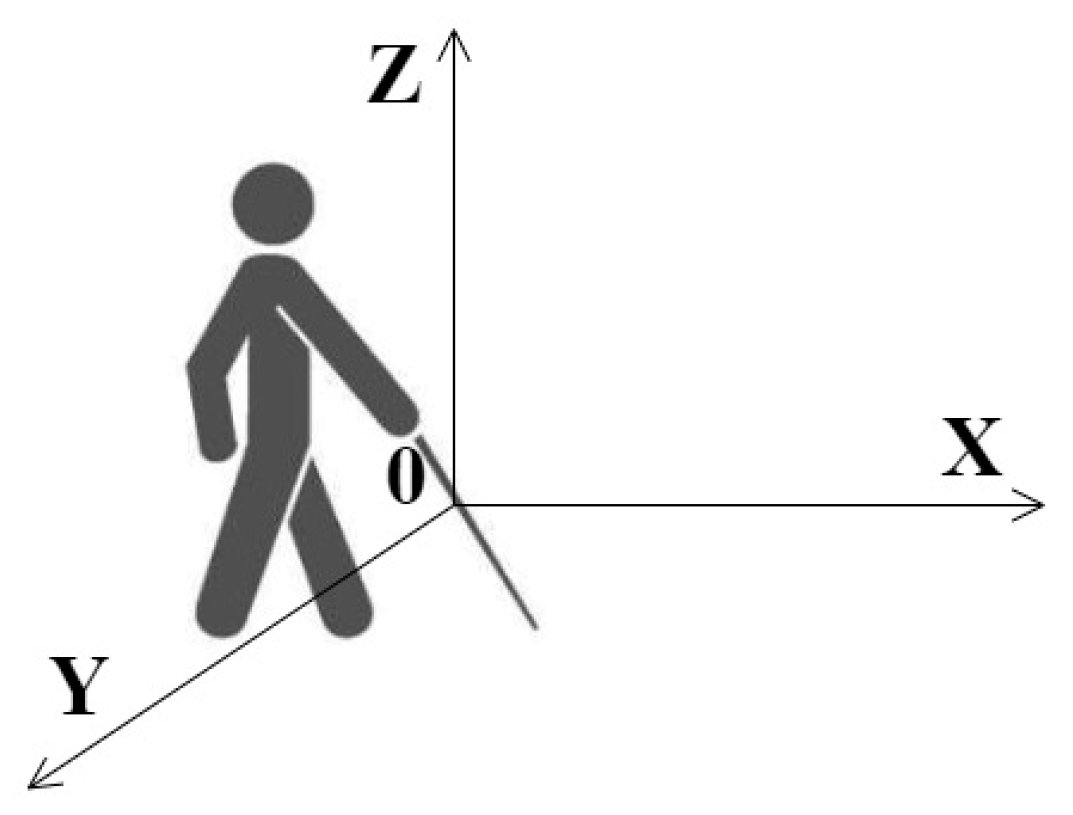
2.2. Obstacle Distance Measurement
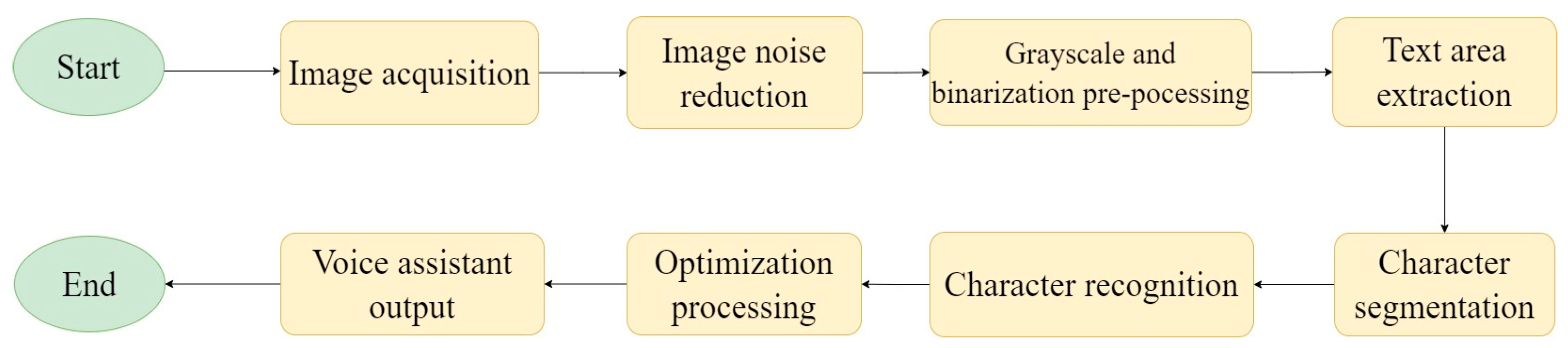
2.3. Text Recognition
2.4. Heart Rate Detection
2.5. Fall Detection
2.6. Body Temperature Measurement
2.7. Humidity-Temperature Monitoring
3. Proposed System
3.1. AIoT-Based Architecture
3.2. Design of Wearable Smart Glasses
3.3. Design of Intelligent Walking Stick
4. Results and Discussion
4.1. Experimental Implementation
4.2. Results of Wearable Smart Glasses Experiments
4.3. Results of Intelligent Walking Stick Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jivrajani, K.; Patel, S.K.; Parmar, C.; Surve, J.; Ahmed, K.; Bui, F.M.; Al-Zahrani, F.A. AIoT-based smart stick for visually impaired person. IEEE Trans. Instrum. Meas. 2023, 72, 2501311. [Google Scholar] [CrossRef]
- Ackland, P.; Resnikoff, S.; Bourne, R. World blindness and visual impairment: Despite many successes, the problem is growing. Community Eye Health 2017, 30, 71–73. [Google Scholar] [PubMed]
- Real, S.; Araujo, A. Navigation systems for the blind and visually impaired: Past work, challenges, and open problems. Sensors 2019, 19, 3404. [Google Scholar] [CrossRef] [PubMed]
- El-Rashidy, N.; El-Sappagh, S.; Islam, S.M.R.; El-Bakry, H.M.; Abdelrazek, S. Mobile health in remote patient monitoring for chronic diseases: Principles, trends, and challenges. Diagnostics 2021, 11, 607. [Google Scholar] [CrossRef] [PubMed]
- Husin, M.H.; Lim, Y.K. InWalker: Smart white cane for the blind. Disabil. Rehabil. Assist. Technol. 2020, 15, 701–707. [Google Scholar] [CrossRef]
- Glenk, L.M.; Přibylová, L.; Stetina, B.U.; Demirel, S.; Weissenbacher, K. Perceptions on health benefits of guide dog ownership in an Austrian population of blind people with and without a guide dog. Animals 2019, 9, 428. [Google Scholar] [CrossRef]
- Chang, W.; Chen, L.; Hsu, C.; Chen, J.; Yang, T.; Lin, C. MedGlasses: A wearable smart-glasses-based drug pill recognition system using deep learning for visually impaired chronic patients. IEEE Access 2020, 8, 17013–17024. [Google Scholar] [CrossRef]
- Kuriakose, B.; Shrestha, R.; Sandnes, F.E. Tools and technologies for blind and visually impaired navigation support: A review. IETE Tech. Rev. 2020, 39, 3–18. [Google Scholar] [CrossRef]
- Li, B.; Muñoz, J.P.; Rong, X.; Chen, Q.; Xiao, J.; Tian, Y.; Arditi, A.; Yousuf, M. Vision-based mobile indoor assistive navigation aid for blind people. IEEE Trans. Mobile Comput. 2019, 18, 702–714. [Google Scholar] [CrossRef]
- Plikynas, D.; Žvironas, A.; Gudauskis, M.; Budrionis, A.; Daniušis, P.; Sliesoraitytė, I. Research advances of indoor navigation for blind people: A brief review of technological instrumentation. IEEE Instrum. Meas. Mag. 2020, 23, 22–32. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Xiao, Y.; Tian, Z.; Yu, J.; Zhang, Y.; Liu, S.; Du, S.; Lan, X. A review of object detection based on deep learning. Multimed. Tools Appl. 2020, 79, 23729–23791. [Google Scholar] [CrossRef]
- Sermanet, P.; Eigen, D.; Zhang, X.; Mathieu, M.; Fergus, R.; LeCun, Y. Overfeat: Integrated recognition, localization and detection using convolutional networks. arXiv 2013, arXiv:1312.6229. [Google Scholar]
- Wu, M.; Yue, H.; Wang, J.; Huang, Y.; Liu, M.; Jiang, Y.; Ke, C.; Zeng, C. Object detection based on RGC mask R-CNN. IET Image Process. 2020, 14, 1502–1508. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, P.; Wergeles, N.; Shang, Y. A survey and performance evaluation of deep learning methods for small object detection. Expert Syst. Appl. 2021, 172, 114602. [Google Scholar] [CrossRef]
- Diwan, T.; Anirudh, G.; Tembhurne, J.V. Object detection using YOLO: Challenges, architectural successors, datasets and applications. Multimed. Tools Appl. 2022, 82, 9243–9275. [Google Scholar] [CrossRef]
- Mallikarjuna, G.C.P.; Hajare, R.; Pavan, P.S.S. Cognitive IoT System for visually impaired: Machine learning approach. Mater. Today Proc. 2022, 49, 529–535. [Google Scholar] [CrossRef]
- Dunai, L.D.; Lengua, I.L.; Tortajada, I.; Simon, F.B. Obstacle detectors for visually impaired people. In Proceedings of the 2014 International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Bran, Romania, 22–24 May 2014; pp. 809–816. [Google Scholar]
- Meshram, V.V.; Patil, K.; Meshram, V.A.; Shu, F.C. An astute assistive device for mobility and object recognition for visually impaired people. IEEE Trans. Hum. Mach. Syst. 2019, 49, 449–460. [Google Scholar] [CrossRef]
- Villanueva, J.; Farcy, R. Optical device indicating a safe free path to blind people. IEEE Trans. Instrum. Meas. 2011, 61, 170–177. [Google Scholar] [CrossRef]
- Mustapha, B.; Zayegh, A.; Begg, R.K. Ultrasonic and infrared sensors performance in a wireless obstacle detection system. In Proceedings of the 2013 1st International Conference on Artificial Intelligence, Modelling and Simulation (AIMS), Kota Kinabalu, Malaysia, 3–5 December 2013; pp. 487–492. [Google Scholar]
- Monteiro, J.; Aires, J.P.; Granada, R.; Barros, R.C.; Meneguzzi, F. Virtual guide dog: An application to support visually-impaired people through deep convolutional neural networks. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 2267–2274. [Google Scholar]
- Pei, S.; Zhu, M. Real-time text detection and recognition. arXiv 2020, arXiv:2011.00380. [Google Scholar]
- Mukhiddinov, M.; Cho, J. Smart glass system using deep learning for the blind and visually impaired. Electronics 2021, 10, 2756. [Google Scholar] [CrossRef]
- Georgiou, K.; Larentzakis, A.V.; Khamis, N.N.; Alsuhaibani, G.I.; Alaska, Y.A.; Giallafos, E.J. Can wearable devices accurately measure heart rate variability? A systematic review. Folia Med. 2018, 60, 7–20. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Komaragiri, R.; Kumar, M. A review on computation methods used in photoplethysmography signal analysis for heart rate estimation. Arch. Comput. Methods Eng. 2021, 29, 921–940. [Google Scholar]
- Kyriacou, P.A. Introduction to photoplethysmography. In Photoplethysmography; Elsevier: Amsterdam, The Netherlands, 2022; pp. 1–16. [Google Scholar]
- Huang, N.; Selvaraj, N. Robust PPG-based ambulatory heart rate tracking algorithm. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 5929–5934. [Google Scholar]
- Mubashir, M.; Shao, L.; Seed, L. A survey on fall detection: Principles and approaches. Neurocomputing 2013, 100, 144–152. [Google Scholar] [CrossRef]
- Pierleoni, P.; Belli, A.; Maurizi, L.; Palma, L.; Pernini, L.; Paniccia, M.; Valenti, S. A wearable fall detector for elderly people based on AHRS and barometric sensor. IEEE Sens. J. 2016, 16, 6733–6744. [Google Scholar] [CrossRef]
- Xu, T.; Zhou, Y.; Zhu, J. New advances and challenges of fall detection systems: A survey. Appl. Sci. 2018, 8, 418. [Google Scholar] [CrossRef]
- Mrozek, D.; Koczur, A.; Małysiak-Mrozek, B. Fall detection in older adults with mobile IoT devices and machine learning in the cloud and on the edge. Inf. Sci. 2020, 537, 132–147. [Google Scholar] [CrossRef]
- Rahman, M.M.; Islam, M.M.; Ahmmed, S.; Khan, S.A. Obstacle and fall detection to guide the visually impaired people with real time monitoring. SN Comput. Sci. 2020, 1, 219. [Google Scholar] [CrossRef]
- Chang, W.J.; Chen, L.B.; Chen, M.C.; Su, J.P.; Sie, C.Y.; Yang, C.H. Design and implementation of an intelligent assistive system for visually impaired people for aerial obstacle avoidance and fall detection. IEEE Sen. J. 2020, 20, 10199–10210. [Google Scholar] [CrossRef]
- Elmannai, W.; Elleithy, K. Sensor-based assistive devices for visually-impaired people: Current status, challenges, and future directions. Sensors 2017, 17, 565. [Google Scholar] [CrossRef]
- Khan, M.A.; Nisar, K.; Nisar, S.; Chowdhry, B.S.; Lodhi, E.; Khan, J.; Haque, M.R. An Android-based portable smart cane for visually impaired people. In Proceedings of the 2021 IEEE 15th International Conference on Application of Information and Communication Technologies (AICT), Baku, Azerbaijan, 13–15 October 2021; pp. 1–6. [Google Scholar]
- Islam, M.M.; Sadi, M.S.; Zamli, K.Z.; Ahmed, M.M. Developing walking assistants for visually impaired people: A review. IEEE Sens. J. 2019, 19, 2814–2828. [Google Scholar] [CrossRef]
- Zhangaskanov, D.; Zhumatay, N.; Ali, M.H. Audio-based smart white cane for visually impaired people. In Proceedings of the International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 889–893. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Chandna, S.; Singhal, A. Towards outdoor navigation system for visually impaired people using YOLOv5. In Proceedings of the 2022 12th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 27–28 January 2022; pp. 617–622. [Google Scholar]
- Jiang, J.; Liu, L.; Fu, R.; Yan, Y.; Shao, W. Non-horizontal binocular vision ranging method based on pixels. Opt. Quantum Electron. 2020, 52, 223. [Google Scholar] [CrossRef]
- Jiang, Y.; Dong, H.; El Saddik, A. Baidu Meizu deep learning competition: Arithmetic operation recognition using end-to-end learning OCR technologies. IEEE Access 2018, 6, 60128–60136. [Google Scholar] [CrossRef]
- Cao, T.; Tao, L.; Liu, D.; Wang, Q.; Sun, J. Design and realization of blood oxygen and heart rate sensor nodes in wireless body area network. In Proceedings of the 2020 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 27–29 June 2020; pp. 469–473. [Google Scholar]
- Abuzairi, T.; Sumantri, I.N.; Irfan, A.; Mohamad, M.R. Infrared thermometer on the wall (iThermowall): An open source and 3-D print infrared thermometer for fever screening. HardwareX 2021, 9, e00168. [Google Scholar] [CrossRef] [PubMed]
- Xu, G.; Li, X.; Su, J.; Pan, H.; Tian, G. Precision evaluation of three-dimensional feature points measurement by binocular vision. J. Opt. Soc. Korea 2011, 15, 30–37. [Google Scholar] [CrossRef]
- Delahoz, Y.S.; Labrador, M.A. Survey on fall detection and fall prevention using wearable and external sensors. Sensors 2014, 14, 19806–19842. [Google Scholar] [CrossRef]
- Lan, F.; Zhai, G.; Lin, W. Lightweight smart glass system with audio aid for visually impaired people. In Proceedings of the 2015 IEEE Region 10 Conference (TENCON), Macao, China, 1–4 November 2015; pp. 1–4. [Google Scholar]
- Jiang, B.; Yang, J.; Lv, Z.; Song, H. Wearable vision assistance system based on binocular sensors for visually impaired users. IEEE Internet Things J. 2019, 6, 1375–1383. [Google Scholar] [CrossRef]
- Rajesh, M.; Rajan, B.K.; Ajay, R.; Thomas, K.A.; Thomas, A.; Tharakan, T.B.; Dinesh, C. Text recognition and face detection aid for visually impaired person using Raspberry PI. In Proceedings of the 2017 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Kollam, India, 20–21 April 2017; pp. 1–5. [Google Scholar]
- Khan, M.A.; Paul, P.; Rashid, M.; Hossain, M.; Ahad, M.A.R. An AI-Based visual aid with integrated reading assistant for the completely blind. IEEE Trans. Hum. Mach. Syst. 2020, 50, 507–517. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.; Zhang, D.; Lee, D.J. Semi-supervised group emotion recognition based on contrastive learning. Electronics 2022, 11, 3990. [Google Scholar] [CrossRef]
- Xie, G.; Ren, J.; Marshall, S.; Zhao, H.; Li, R.; Chen, R. Self-attention enhanced deep residual network for spatial image steganalysis. Digit. Signal Process. 2023, 139, 104063. [Google Scholar] [CrossRef]
- Li, J.W.; Barma, S.; Mak, P.U.; Pun, S.H.; Vai, M.I. Brain rhythm sequencing using EEG signals: A case study on seizure detection. IEEE Access 2019, 7, 160112–160124. [Google Scholar] [CrossRef]
- Ma, P.; Ren, J.; Sun, G.; Zhao, H.; Jia, X.; Yan, Y.; Zabalza, J. Multiscale superpixelwise prophet model for noise-robust feature extraction in hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5508912. [Google Scholar] [CrossRef]
- Chen, R.; Huang, H.; Yu, Y.; Ren, J.; Wang, P.; Zhao, H.; Lu, X. Rapid detection of multi-QR codes based on multistage stepwise discrimination and a compressed MobileNet. IEEE Internet Things J. 2023; early access. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Number of Items | Actual Object | Predicated Object | Failure Detection |
|---|---|---|---|---|
| 1 | One | Person | Person | None |
| 2 | One | Cup | Cup | None |
| 3 | One | Pen | Pen | None |
| 4 | One | Keyboard | Keyboard | None |
| 5 | One | Monitor | Monitor | None |
| 6 | Two | Person, Bottle | Person, Bottle | None |
| 7 | Two | Chair, Mouse | Chair, Mouse | None |
| 8 | Three | Book, Pen, Phone | Book, Pen, Phone | None |
| 9 | Three | Person, Cup, Chair | Person, Cup, Chair | None |
| 10 | Four | Person, Mouse, Monitor, Keyboard | Person, Mouse, TV, Keyboard | Monitor |
| 11 | Four | Person, Bottle, Chair, Phone | Person, Bottle, Chair, Phone | None |
| 12 | Four | Book, Pen, Mouse, Keyboard | Book, Pen, Mouse, Keyboard | None |
| 13 | Five | Person, Bottle, Chair, Mouse, Monitor | Person, Bottle, Chair, Mouse, TV | Monitor |
| 14 | One | Car | Car | None |
| 15 | Two | Bicycle, Motorcycle | Bicycle, Motorcycle | None |
| 16 | Two | Person, Car | Person, Car | None |
| 17 | Three | Person, Car, Tree | Person, Car, Tree | None |
| 18 | Three | Person, Bicycle, Car | Person, Bicycle, Car | None |
| 19 | Three | Person, Motorcycle, Car | Person, Bicycle, Car | Motorcycle |
| 20 | Five | Person, Tree, Car, Bicycle, Motorcycle | Person, Tree, Car, Bicycle | Motorcycle |
| Cases | Original Number of Words | Correct Number of Words | Accuracy (%) |
|---|---|---|---|
| 1 | 363 | 363 | 100 |
| 2 | 412 | 412 | 100 |
| 3 | 480 | 480 | 100 |
| 4 | 557 | 557 | 100 |
| 5 | 614 | 614 | 100 |
| 6 | 672 | 672 | 100 |
| 7 | 754 | 754 | 100 |
| 8 | 803 | 800 | 99.63 |
| 9 | 872 | 869 | 99.66 |
| 10 | 956 | 954 | 99.79 |
| Cases | States | Age | Gender | Heart Rate Detected by Stick (BPM) | Heart Rate Detected by Xiaomi Device (BPM) | Deviation Rates (%) |
|---|---|---|---|---|---|---|
| 1 | Meditation 30 s | 20 | Female | 72.54 | 72.02 | 0.72 |
| 2 | 22 | Male | 83.89 | 82.21 | 2.04 | |
| 3 | 45 | Female | 69.66 | 71.48 | 2.55 | |
| 4 | 48 | Male | 75.28 | 78.03 | 3.52 | |
| 5 | Walking 30 s | 20 | Female | 82.48 | 79.76 | 3.41 |
| 6 | 22 | Male | 86.31 | 87.02 | 0.82 | |
| 7 | 45 | Female | 74.50 | 76.11 | 2.11 | |
| 8 | 48 | Male | 86.08 | 85.27 | 0.95 |
| Scenarios | Number of Correct Detection | Number of Incorrect Detection | Number of Unresponsive Detection | Accuracy (%) |
|---|---|---|---|---|
| Walking | 86 | 10 | 4 | 86.00 |
| Upstairs | 88 | 10 | 2 | 88.00 |
| Downstairs | 88 | 8 | 4 | 88.00 |
| Subjects | Age | Gender | Body Temperature Measured by Stick (°C) | Body Temperature Measured by Medical Forehead Thermometer (°C) | Deviation Rates (%) |
|---|---|---|---|---|---|
| A | 20 | Female | 36.47 | 36.44 | 0.08 |
| B | 22 | Male | 36.80 | 36.73 | 0.19 |
| C | 45 | Female | 36.63 | 36.67 | 0.11 |
| D | 48 | Male | 36.86 | 36.81 | 0.14 |
| Days | Temperature Measured by Stick (°C) | Humidity Measured by Stick (%RH) | Temperature Measured by Xiaomi Device (°C) | Humidity Measured by Xiaomi Device (%RH) | Deviation Rates of Temperature (%) | Deviation Rates of Humidity (%) |
|---|---|---|---|---|---|---|
| 1 | 16.7 | 49 | 16.4 | 50 | 1.83 | 2.00 |
| 2 | 19.2 | 57 | 19.3 | 57 | 0.52 | 0.00 |
| 3 | 17.0 | 62 | 17.5 | 64 | 2.86 | 3.13 |
| 4 | 20.1 | 51 | 20.0 | 51 | 0.50 | 0.00 |
| 5 | 17.8 | 55 | 17.9 | 54 | 0.56 | 1.86 |
| 6 | 18.9 | 60 | 18.8 | 59 | 0.53 | 1.69 |
| 7 | 17.5 | 61 | 17.7 | 61 | 1.13 | 0.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Xie, L.; Chen, Z.; Shi, L.; Chen, R.; Ren, Y.; Wang, L.; Lu, X. An AIoT-Based Assistance System for Visually Impaired People. Electronics 2023, 12, 3760. https://doi.org/10.3390/electronics12183760
Li J, Xie L, Chen Z, Shi L, Chen R, Ren Y, Wang L, Lu X. An AIoT-Based Assistance System for Visually Impaired People. Electronics. 2023; 12(18):3760. https://doi.org/10.3390/electronics12183760
Chicago/Turabian StyleLi, Jiawen, Lianglu Xie, Zhe Chen, Liang Shi, Rongjun Chen, Yongqi Ren, Leijun Wang, and Xu Lu. 2023. "An AIoT-Based Assistance System for Visually Impaired People" Electronics 12, no. 18: 3760. https://doi.org/10.3390/electronics12183760
APA StyleLi, J., Xie, L., Chen, Z., Shi, L., Chen, R., Ren, Y., Wang, L., & Lu, X. (2023). An AIoT-Based Assistance System for Visually Impaired People. Electronics, 12(18), 3760. https://doi.org/10.3390/electronics12183760