
A Two-Degree-of-Freedom PID Integral Super-Twisting Controller Based on Atom Search Optimizer Applied to DC-DC Interleaved Converters for Fuel Cell Applications

 ,
,  and
and 
Abstract
:1. Introduction
- The use of an improved topology utilizing a three-phase DC-DC converter, instead of the conventional boost converter, has been proposed for the purpose of enhancing fuel cell output regulation.
- The design and implementation of a new robust dual-loop controller based on 2DOFPID for the voltage loop and STISM for the current loop was developed for DC bus voltage regulation of a PEMFC IBC converter.
- The tuning of optimal parameters of the suggested dual-loop controller are identified through atom search (ASO)-based optimal design. The ASO tuning optimizer was compared with two other optimization approaches that have been recently reported in the literature.
- A comparison is made between the proposed ASO-2DOFPID- STISM controller and the ASO-based PID controller.
- A 1.2 k watt test bench has been developed to carry out the performance evaluation of the suggested dual-loop controller.
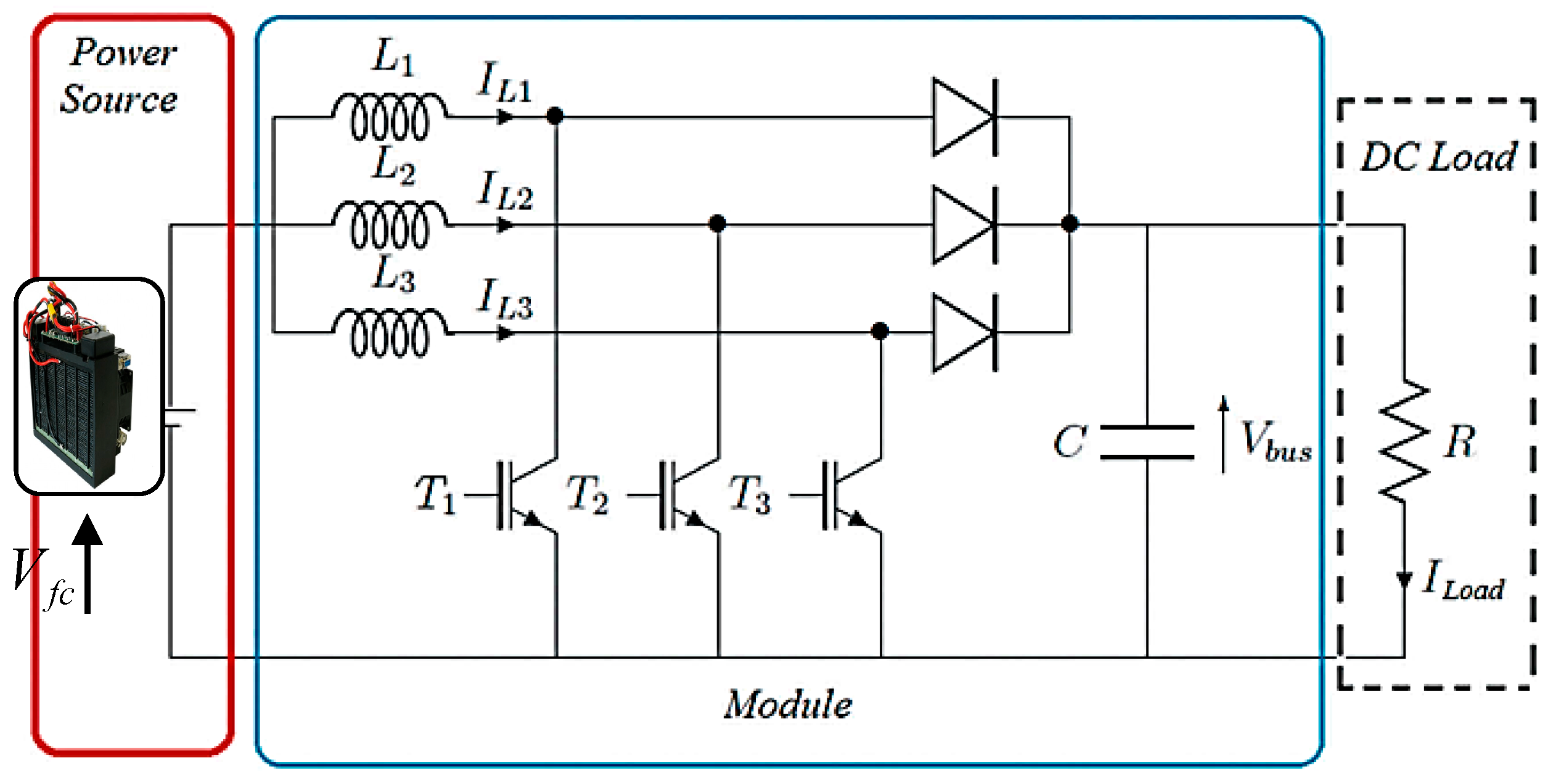
2. Presentation of the PEMFC Three-Phase IBC Converter
3. Modelling of the PEMFC-IBC System
3.1. Mathematical Model of the PEMFC
3.2. Modelling of the Three-Phase IBC Converter
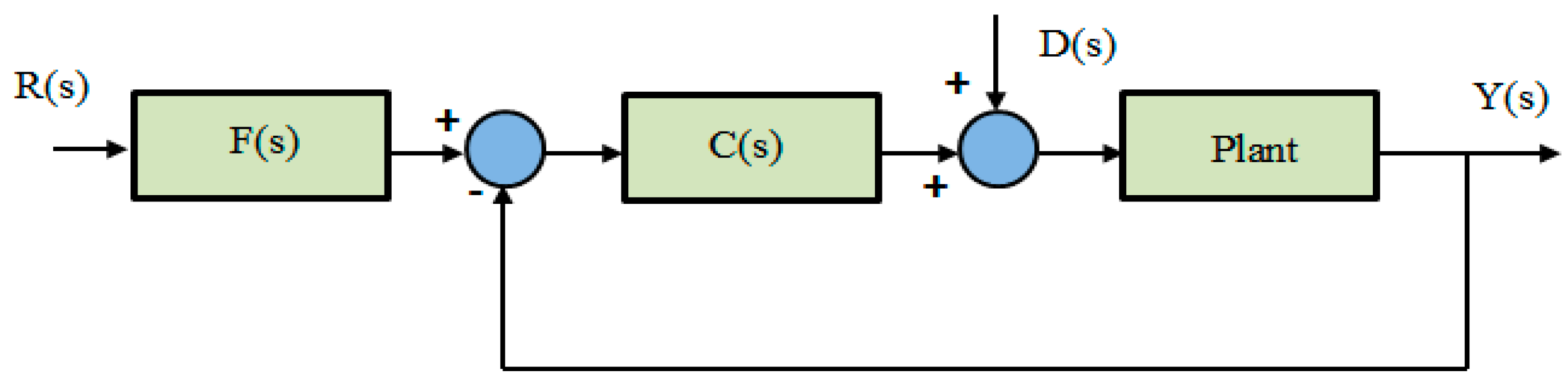
4. Proposed Dual-Loop Control Architecture
- (1)
- Instantaneous equal current distribution across all phases in the IBC.
- (2)
- Fixed DC bus output voltage against load disturbances and potential failure modes.
- (3)
- Guaranteed high performance in all operation conditions.
4.1. Two-Degree-of-Freedom PID Voltage Loop
4.2. Super-Twisting Integral Sliding Controller Current Loop
4.3. Optimal Tuning of Controller Parameters
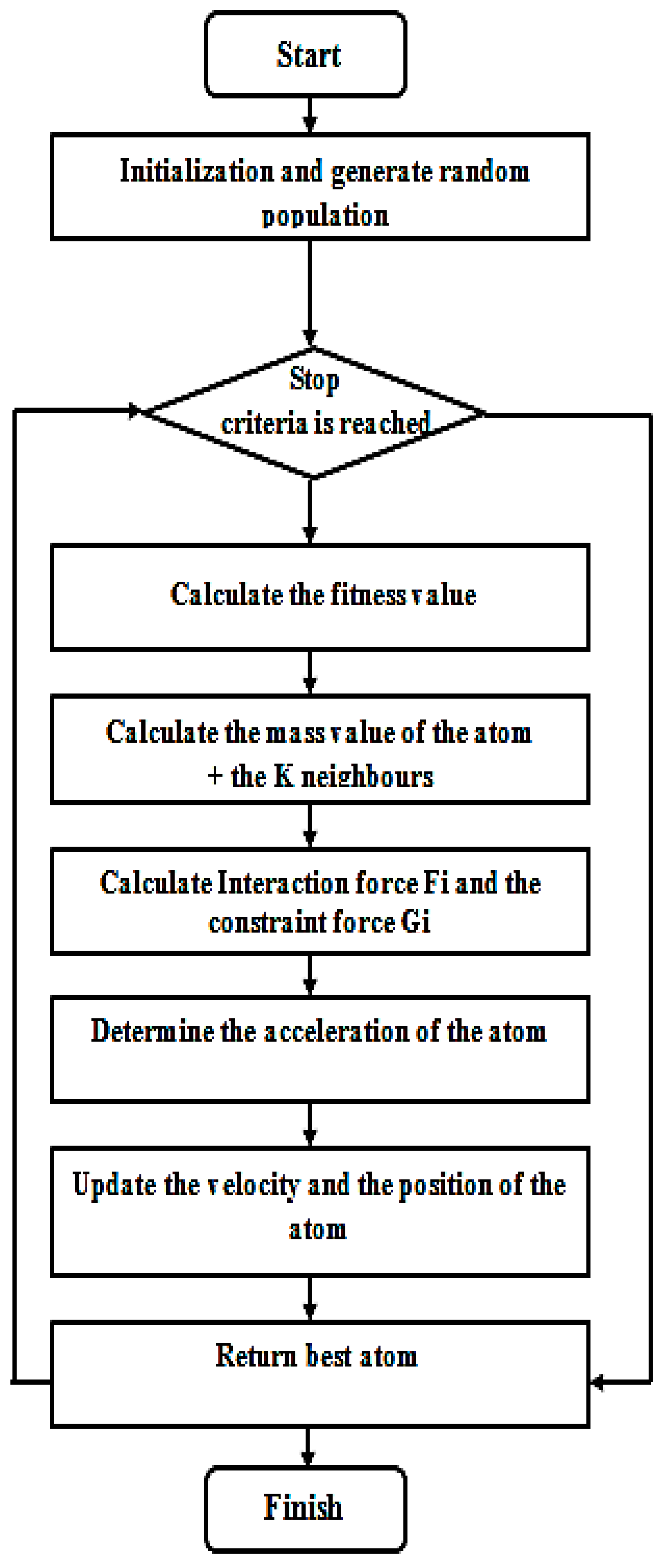
4.4. Atom Search Algorithm
5. Performance Validation and Simulation Results
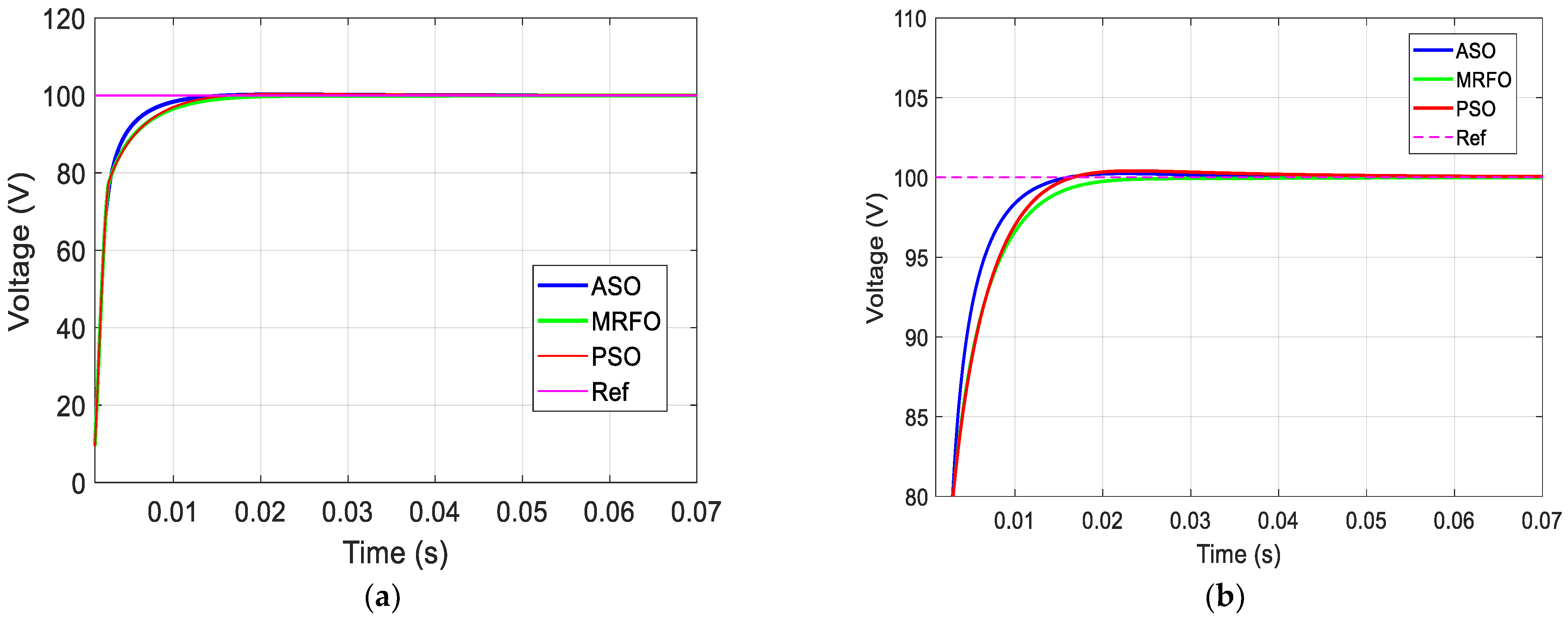
5.1. Examination of the Proposed Controller Compared with Other Optimization Techniques
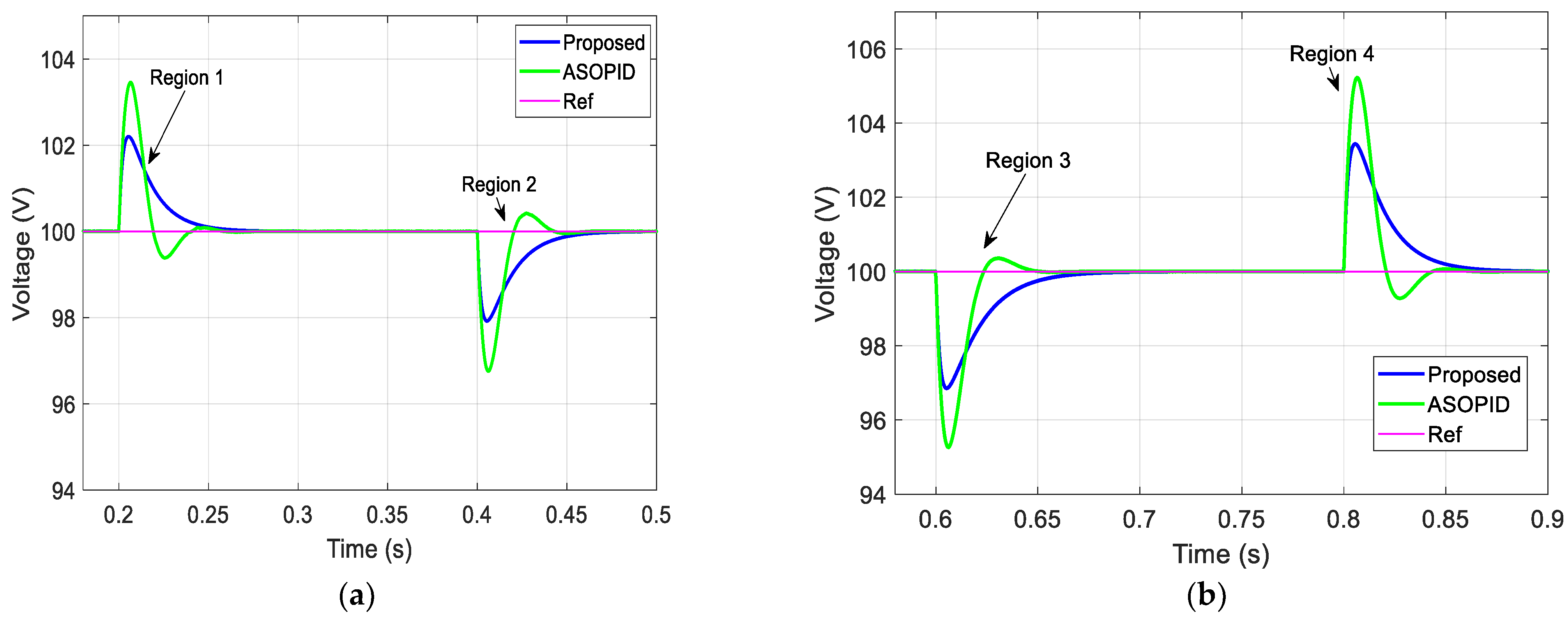
5.2. Examination of the ASO-Tuned Proposed Controller Compared with the ASO-PID Controller
5.3. Robustness Examination of the ASO-Tuned Proposed Controller against Uncertainty
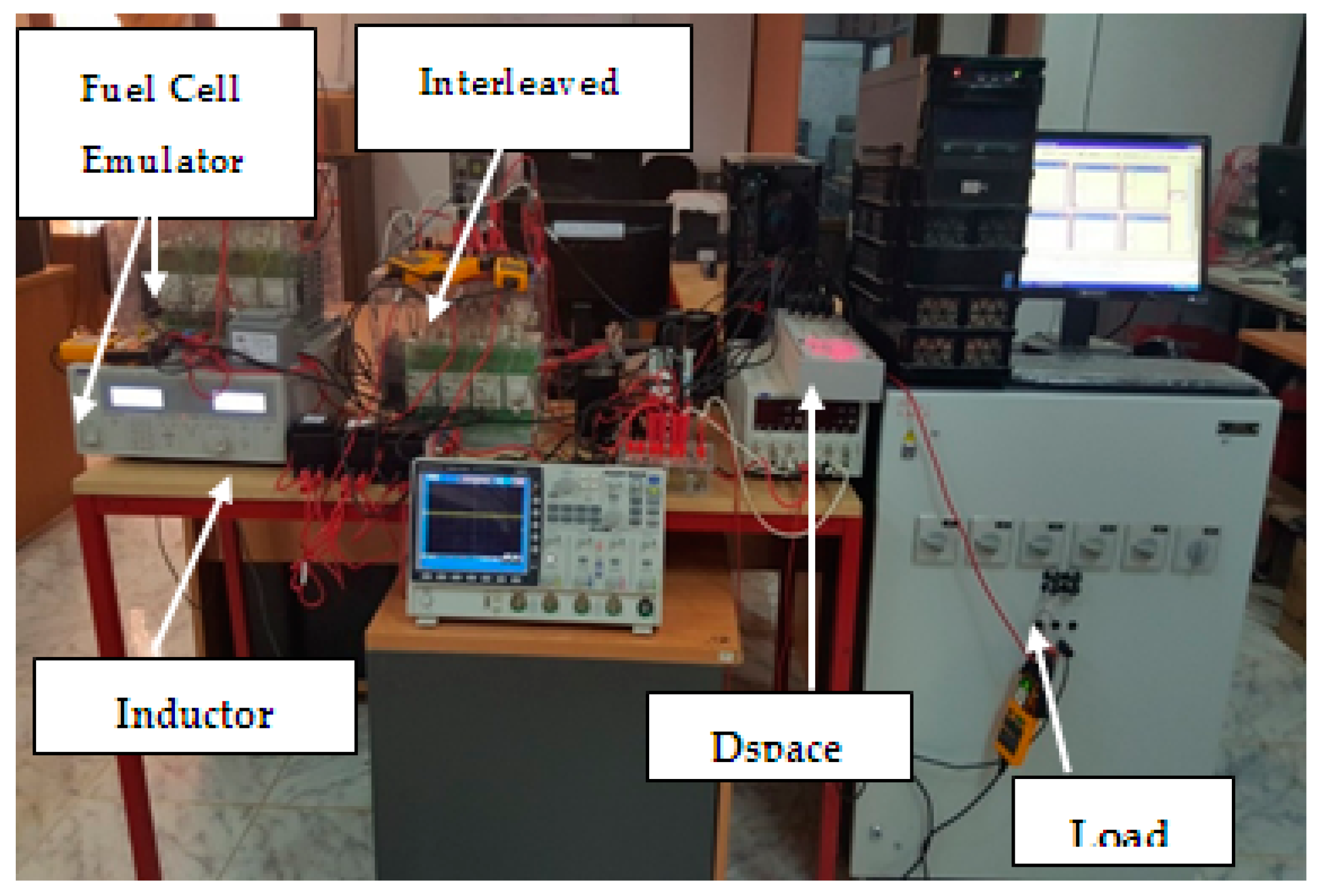
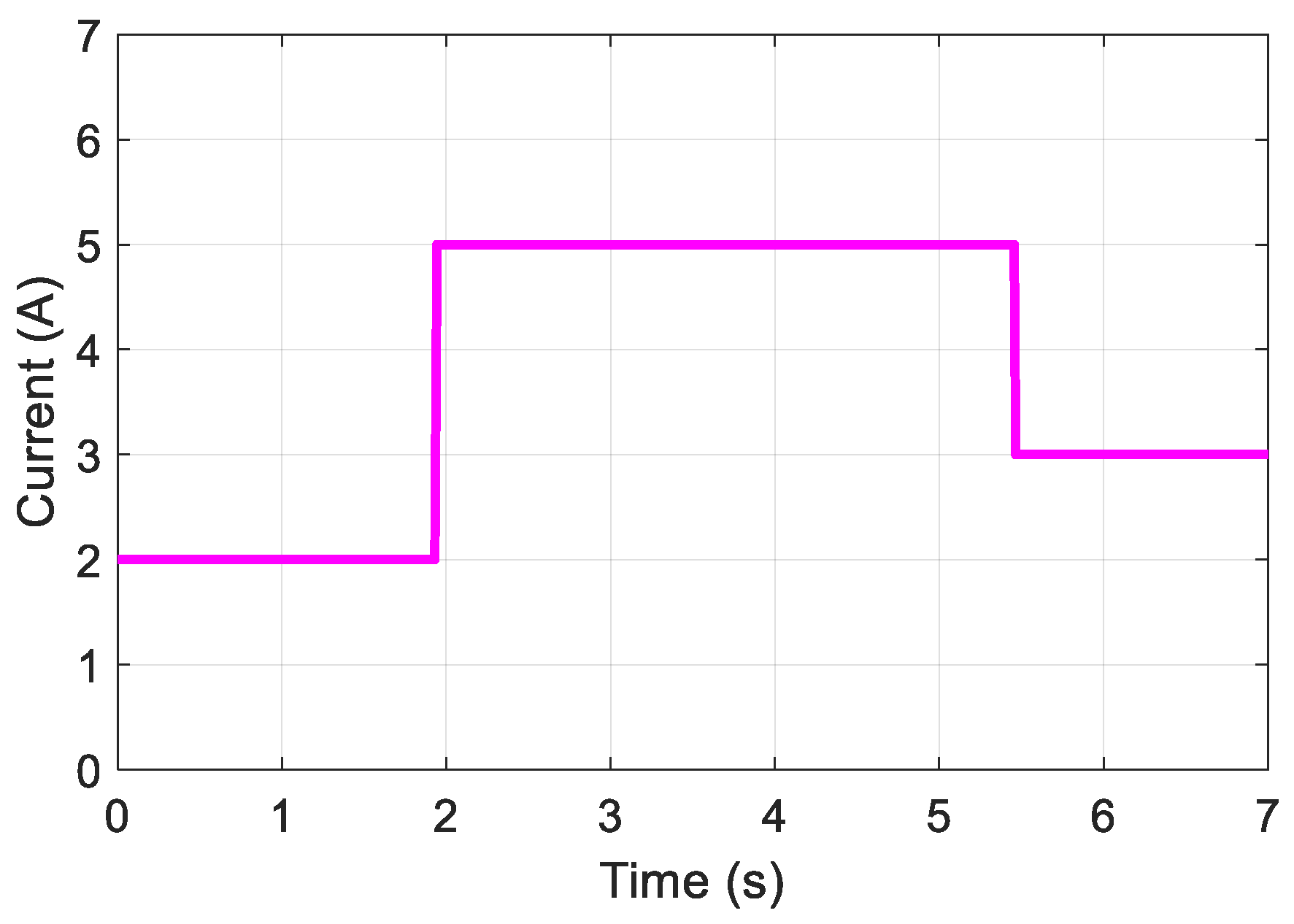
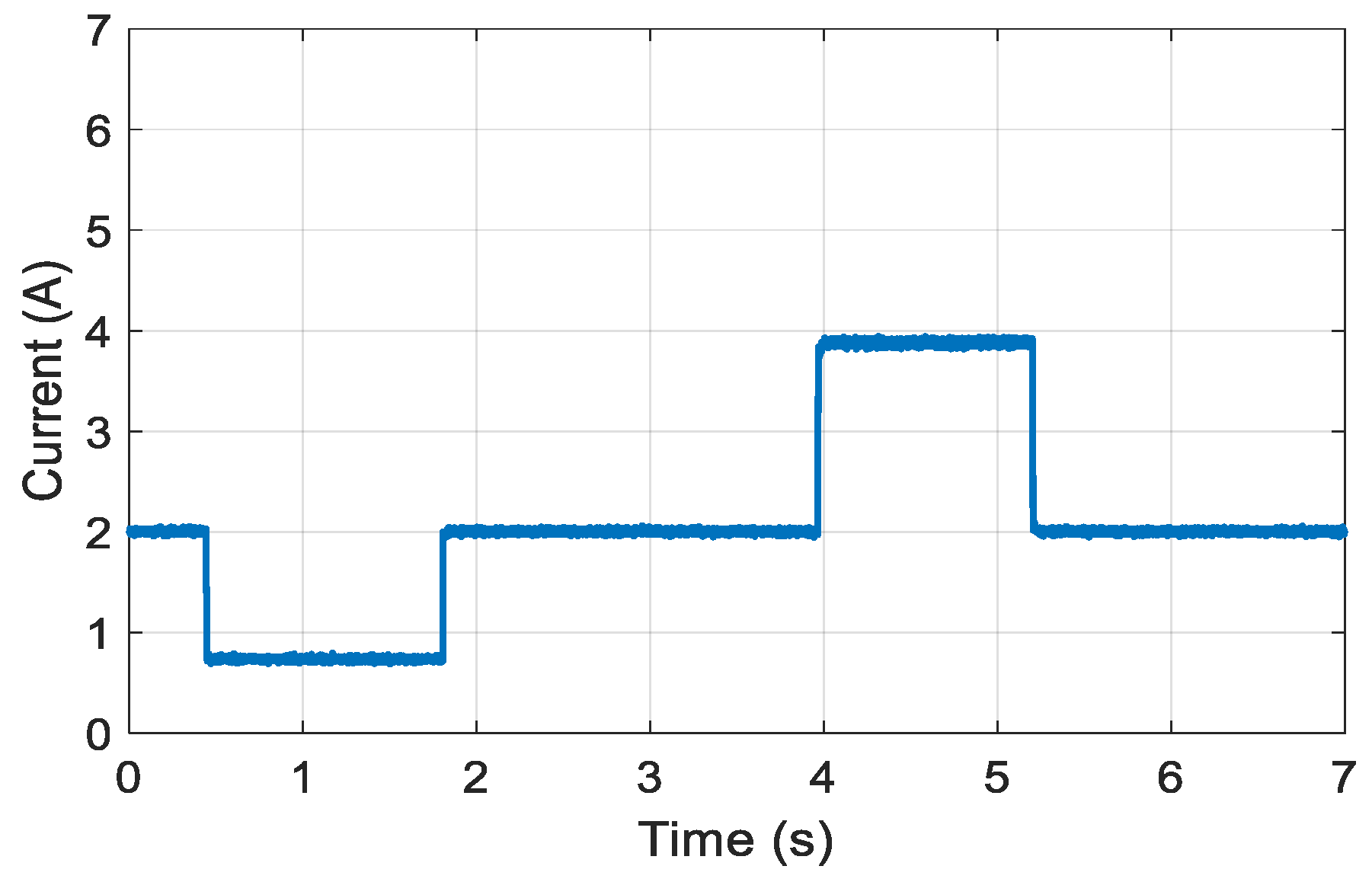
6. Experimental Validation of the Proposed Controller
7. Real-Time Hardware Implementation Challenges
- Equal current sharing and synchronous phase control of the interleaved converters: Ensuring equitable current sharing and phase control of the interleaved converters was a crucial issue. A dedicated effort was made to optimize the control sequence, which minimizes ripple effects and achieves efficient power transfer.
- Precision of the sensor and signal filtering: The analogue sensors used in the prototype may produce noisy data. This can degrade the quality of the feedback signal and destabilize the control loop. To address this issue, a numeric low-pass filter is added to the measured voltages and currents to smooth the data and ensure a reliable measured signal.
- Handling of the computational overloads on DSpace 1104: Complex control algorithms and simultaneous tasks may lead to reaching the DS1104’s computational limits, which can lead to possible overloads. For that reason, the Simulink control algorithms must be optimized, and nonessential tasks are offloaded to reduce computational strain on the DS1104.
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Olabi, A.G.; Wilberforce, T.; Abdelkareem, M.A. Fuel cell application in the automotive industry and future perspective. Energy 2021, 214, 118955. [Google Scholar] [CrossRef]
- Ayad, M.; Becherif, M.; Henni, A. Vehicle hybridization with fuel cell, supercapacitors and batteries by sliding mode control. Renew. Energy 2011, 36, 2627–2634. [Google Scholar] [CrossRef]
- Wang, Y.; Yue, L.; Wang, S. New design of a cathode flow-field with a sub-channel to improve the polymer electrolyte membrane fuel cell performance. J. Power Sources 2017, 344, 32–38. [Google Scholar] [CrossRef]
- Hu, K.; Zhao, P.; Wang, S.; Wang, Y. Three-dimensional multiphase simulation of a partially narrowed flow field configuration for a high-performance polymer electrolyte membrane fuel cell. Appl. Therm. Eng. 2023, 223, 119986. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, H.; Wang, X.; Gao, Y.; Su, X.; Qin, Y.; Xing, L. Multi-sub-inlets at cathode flow-field plate for current density homogenization and enhancement of PEM fuel cells in low relative humidity. Energy Convers. Manag. 2022, 252, 115069. [Google Scholar] [CrossRef]
- Alavi, O.; Rajabloo, T.; De Ceuninck, W.; Daenen, M. Non-isolated DC-DC converters in fuel cell applications: Thermal analysis and reliability comparison. Appl. Sci. 2022, 12, 5026. [Google Scholar] [CrossRef]
- Guilbert, D.; N’Diaye, A.; Gaillard, A.; Djerdir, A. Fuel cell systems reliability and availability enhancement by developing a fast and efficient power switch open-circuit fault detection algorithm in interleaved DC/DC boost converter topologies. Int. J. Hydrogen Energy 2016, 41, 15505–15517. [Google Scholar] [CrossRef]
- Thounthong, P.; Davat, B.; Rael, S.; Sethakul, P. Fuel cell high-power applications. IEEE Ind. Electron. Mag. 2009, 3, 32–46. [Google Scholar]
- Liu, C.; Lai, J.-S. Low frequency current ripple reduction technique with active control in a fuel cell power system with inverter load. IEEE Trans. Power Electron. 2007, 22, 1429–1436. [Google Scholar] [CrossRef]
- Zhan, Y.; Guo, Y.; Zhu, J.; Liang, B.; Yang, B. Comprehensive influences measurement and analysis of power converter low frequency current ripple on PEM fuel cell. Int. J. Hydrogen Energy 2019, 44, 31352–31359. [Google Scholar] [CrossRef]
- Kabalo, M.; Paire, D.; Blunier, B.; Bouquain, D.; Godoy Simões, M.; Miraoui, A. Experimental evaluation of four-phase floating interleaved boost converter design and control for fuel cell applications. IET Power Electron. 2013, 6, 215–226. [Google Scholar] [CrossRef]
- Wang, H.; Gaillard, A.; Hissel, D. A review of DC/DC converter-based electrochemical impedance spectroscopy for fuel cell electric vehicles. Renew. Energy 2019, 141, 124–138. [Google Scholar] [CrossRef]
- Kolli, A.; Gaillard, A.; De Bernardinis, A.; Bethoux, O.; Hissel, D.; Khatir, Z. A review on DC/DC converter architectures for power fuel cell applications. Energy Convers. Manag. 2015, 105, 716–730. [Google Scholar] [CrossRef]
- Thounthong, P.; Mungporn, P.; Guilbert, D.; Takorabet, N.; Pierfederici, S.; Nahid-Mobarakeh, B.; Hu, Y.; Bizon, N.; Huangfu, Y.; Kumam, P. Design and control of multiphase interleaved boost converters-based on differential flatness theory for PEM fuel cell multi-stack applications. Int. J. Electr. Power Energy Syst. 2021, 124, 106346. [Google Scholar] [CrossRef]
- Arunkumari, T.; Indragandhi, V. An overview of high voltage conversion ratio DC-DC converter configurations used in DC micro-grid architectures. Renew. Sustain. Energy Rev. 2017, 77, 670–687. [Google Scholar] [CrossRef]
- Farhani, S.; N’Diaye, A.; Djerdir, A.; Bacha, F. Design and practical study of three phase interleaved boost converter for fuel cell electric vehicle. J. Power Sources 2020, 479, 228815. [Google Scholar] [CrossRef]
- Yao, Y.; Gao, S.; Wang, Y.; Liu, X.; Zhang, X.; Xu, D. Design and optimization of an electric vehicle wireless charging system using interleaved boost converter and flat solenoid coupler. IEEE Trans. Power Electron. 2020, 36, 3894–3908. [Google Scholar] [CrossRef]
- Hao, X.; Salhi, I.; Laghrouche, S.; Ait-Amirat, Y.; Djerdir, A. Backstepping supertwisting control of four-phase interleaved boost converter for PEM fuel cell. IEEE Trans. Power Electron. 2022, 37, 7858–7870. [Google Scholar] [CrossRef]
- Somkun, S.; Sirisamphanwong, C.; Sukchai, S. A DSP-based interleaved boost DC–DC converter for fuel cell applications. Int. J. Hydrogen Energy 2015, 40, 6391–6404. [Google Scholar] [CrossRef]
- Arango, E.; Ramos-Paja, C.; Calvente, J.; Giral, R.; Romero, A.; Martinez-Salamero, L. Fuel cell power output using a LQR controlled AIDB converter. In Proceedings of the 2007 International Conference on Clean Electrical Power, Capri, Italy, 21–23 May 2007; pp. 492–499. [Google Scholar]
- Mungporn, P.; Thounthong, P.; Yodwong, B.; Ekkaravarodome, C.; Bilsalam, A.; Pierfederici, S.; Guilbert, D.; Nahid-Mobarakeh, B.; Bizon, N.; Shah, Z. Modeling and control of multiphase interleaved fuel-cell boost converter based on Hamiltonian control theory for transportation applications. IEEE Trans. Transp. Electrif. 2020, 6, 519–529. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhuo, S.; Chen, F.; Pang, S.; Zhao, D.; Gao, F. Robust voltage control of floating interleaved boost converter for fuel cell systems. IEEE Trans. Ind. Appl. 2017, 54, 665–674. [Google Scholar] [CrossRef]
- Thammasiriroj, W.; Chunkag, V.; Phattanasak, M.; Pierfederici, S.; Davat, B.; Thounthong, P. Nonlinear single-loop control of the parallel converters for a fuel cell power source used in DC grid applications. Int. J. Electr. Power Energy Syst. 2015, 65, 41–48. [Google Scholar] [CrossRef]
- Long, R.; Quan, S.; Zhang, L.; Chen, Q.; Zeng, C.; Ma, L. Current sharing in parallel fuel cell generation system based on model predictive control. Int. J. Hydrogen Energy 2015, 40, 11587–11594. [Google Scholar] [CrossRef]
- Zhuo, S.; Xu, L.; Huangfu, Y.; Gaillard, A.; Paire, D.; Gao, F. Robust adaptive control of interleaved boost converter for fuel cell application. IEEE Trans. Ind. Appl. 2021, 57, 6603–6610. [Google Scholar] [CrossRef]
- Salhi, B.; El Fadil, H.; Ahmed Ali, T.; Magarotto, E.; Giri, F. Adaptive output feedback control of interleaved parallel boost converters associated with fuel cell. Electr. Power Compon. Syst. 2015, 43, 1141–1158. [Google Scholar] [CrossRef]
- Belhaj, F.; El Idrissi, Z.; El Fadil, H.; Lassioui, A.; Gaouzi, K.; Koundi, M.; Giri, F.; El Fakir, C. Output-feedback control of interleaved Buck-Boost DC-DC power converter with continuous input current for fuel cell energy sources. In Proceedings of the 2022 IEEE 3rd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Fez, Morocco, 1–2 December 2022; pp. 1–6. [Google Scholar]
- Mungporn, P.; Yodwong, B.; Thounthong, P.; Nahid-Mobarakeh, B.; Takorabet, N.; Guilbert, D.; Kumam, P.; Bizon, N.; Kaewprapha, C. Model-free control of multiphase interleaved boost converter for fuel cell/reformer power generation. In Proceedings of the 2019 Research, Invention, and Innovation Congress (RI2C), Bangkok, Thailand, 11–13 December 2019; pp. 1–6. [Google Scholar]
- Araki, M.; Taguchi, H. Two-degree-of-freedom PID controllers. Int. J. Control Autom. Syst. 2003, 1, 401–411. [Google Scholar]
- Pan, Z.; Dong, F.; Zhao, J.; Wang, L.; Wang, H.; Feng, Y. Combined resonant controller and two-degree-of-freedom PID controller for PMSLM current harmonics suppression. IEEE Trans. Ind. Electron. 2018, 65, 7558–7568. [Google Scholar] [CrossRef]
- Jain, M.; Rani, A.; Pachauri, N.; Singh, V.; Mittal, A.P. Design of fractional order 2-DOF PI controller for real-time control of heat flow experiment. Eng. Sci. Technol. Int. J. 2019, 22, 215–228. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Latif, A.; Sinha, N.; Hussain, S.S.; Ustun, T.S. Active power control of autonomous hybrid power system using two degree of freedom PID controller. Energy Rep. 2022, 8, 973–981. [Google Scholar] [CrossRef]
- Mandala, I.I.; Nazaruddin, Y.Y. Optimization of two degree of freedom PID controller for quadrotor with stochastic fractal search algorithm. In Proceedings of the 2019 IEEE Conference on Control Technology and Applications (CCTA), Hong Kong, China, 19–21 August 2019; pp. 1062–1067. [Google Scholar]
- Karanam, A.N.; Shaw, B. A new two-degree of freedom combined PID controller for automatic generation control of a wind integrated interconnected power system. Prot. Control Mod. Power Syst. 2022, 7, 20. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Novel robust super twisting integral sliding mode controller for a quadrotor under external disturbances. Int. J. Dyn. Control 2020, 8, 805–815. [Google Scholar] [CrossRef]
- Dali, A.; Abdelmalek, S.; Bakdi, A.; Bettayeb, M. A novel effective nonlinear state observer based robust nonlinear sliding mode controller for a 6 kW Proton Exchange Membrane Fuel Cell voltage regulation. Sustain. Energy Technol. Assess. 2021, 44, 100996. [Google Scholar] [CrossRef]
- Banerjee, S.; Ghosh, A.; Rana, N. An improved interleaved boost converter with PSO-based optimal type-III controller. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 5, 323–337. [Google Scholar] [CrossRef]
- Guilbert, D.; Gaillard, A.; N’Diaye, A.; Djerdir, A. Energy efficiency and fault tolerance comparison of DC/DC converters topologies for fuel cell electric vehicles. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 16–19 June 2013; pp. 1–7. [Google Scholar]
- Amphlett, J.C.; Baumert, R.M.; Mann, R.F.; Peppley, B.A.; Roberge, P.R.; Harris, T.J. Performance modeling of the Ballard Mark IV solid polymer electrolyte fuel cell: I. Mechanistic model development. J. Electrochem. Soc. 1995, 142, 1. [Google Scholar] [CrossRef]
- Mann, R.F.; Amphlett, J.C.; Hooper, M.A.; Jensen, H.M.; Peppley, B.A.; Roberge, P.R. Development and application of a generalised steady-state electrochemical model for a PEM fuel cell. J. Power Sources 2000, 86, 173–180. [Google Scholar] [CrossRef]
- Taguchi, H.; Araki, M. Two-degree-of-freedom PID controllers—Their functions and optimal tuning. IFAC Proc. Vol. 2000, 33, 91–96. [Google Scholar] [CrossRef]
- Guras, R.; Strambersky, R.; Mahdal, M. The PID and 2DOF control of the integral system-influence of the 2DOF parameters and practical implementation. Meas. Control 2022, 55, 94–101. [Google Scholar] [CrossRef]
- Gupta, N.K.; Kar, M.K.; Singh, A.K. Design of a 2-DOF-PID controller using an improved sine–cosine algorithm for load frequency control of a three-area system with nonlinearities. Prot. Control Mod. Power Syst. 2022, 7, 33. [Google Scholar] [CrossRef]
- Sami, I.; Ullah, S.; Basit, A.; Ullah, N.; Ro, J.-S. Integral super twisting sliding mode based sensorless predictive torque control of induction motor. IEEE Access 2020, 8, 186740–186755. [Google Scholar] [CrossRef]
- Utkin, V.; Shi, J. Integral sliding mode in systems operating under uncertainty conditions. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; pp. 4591–4596. [Google Scholar]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z. Atom search optimization and its application to solve a hydrogeologic parameter estimation problem. Knowl.-Based Syst. 2019, 163, 283–304. [Google Scholar] [CrossRef]
- Sahu, R.K.; Panda, S.; Rout, U.K. DE optimized parallel 2-DOF PID controller for load frequency control of power system with governor dead-band nonlinearity. Int. J. Electr. Power Energy Syst. 2013, 49, 19–33. [Google Scholar] [CrossRef]
- Zhao, W.; Shi, T.; Wang, L.; Cao, Q.; Zhang, H. An adaptive hybrid atom search optimization with particle swarm optimization and its application to optimal no-load PID design of hydro-turbine governor. J. Comput. Des. Eng. 2021, 8, 1204–1233. [Google Scholar] [CrossRef]
- Reddy, C.R.; Goud, B.S.; Aymen, F.; Rao, G.S.; Bortoni, E.C. Power quality improvement in HRES grid connected system with FOPID based atom search optimization technique. Energies 2021, 14, 5812. [Google Scholar] [CrossRef]
- Zhao, W.; Zhang, Z.; Wang, L. Manta ray foraging optimization: An effective bio-inspired optimizer for engineering applications. Eng. Appl. Artif. Intell. 2020, 87, 103300. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Ghamari, S.M.; Narm, H.G.; Mollaee, H. Fractional-order fuzzy PID controller design on buck converter with antlion optimization algorithm. IET Control Theory Appl. 2022, 16, 340–352. [Google Scholar] [CrossRef]











































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| PEMFC-rated power, Pfc | 1200 [W] |
| PEMFC output voltage range, Vfc | 24–38 [V] |
| Stack-rated current, Ifc | 46 [A] |
| DC bus voltage, Vs | 100 [V] |
| Inductance value, L | 1 mH |
| Capacitance value, C | 1100 μF |
| Frequency, Fs | 10 [kHz] |
| Sample time, Ts | 1 μs |
| Parameters | ASO | MRFO | PSO |
|---|---|---|---|
| Kp | 1.3617 | 1.0803 | 0.9435 |
| Ki | 88.1297 | 67.7706 | 44.0171 |
| Kd | 8.5610 × 10−6 | 1.0447 × 10−5 | 9.2468 × 10−6 |
| B | 0.8890 | 0.88471 | 0.94416 |
| C | 1.7145 | 3.5280 | 0.0924 |
| K | 200 | 222.3244 | 232.7287 |
| α | 127.51 | 200.1200 | 232.7287 |
| λ | 1.9801 | 1.7900 | 1.6223 |
| Optimization Algorithm | Overshoot (100%) | Settling Time (s) | Rise Time (s) | ITAE 1 (Voltage Loop) | ITAE 2 (Current Loop) | Fitness Function |
|---|---|---|---|---|---|---|
| ASO | 0.1574 | 0.0094 | 0.0035 | 6.5283 × 10−4 | 0.0077 | 0.0042 |
| MRFO | 0.0057 | 0.0121 | 0.0045 | 8.4780 × 10−4 | 0.0080 | 0.0044 |
| PSO | 0.4331 | 0.0113 | 0.0046 | 0.0011 | 0.0084 | 0.0048 |
| Performance | Tuning Algorithm | Region 1 | Region 2 | Region 3 | Region 3 |
|---|---|---|---|---|---|
| Overshoot (100%) | ASO | 2.20 | / | / | 3.44 |
| MRFO | 2.7 | / | / | 4.14 | |
| PSO | 3.13 | / | / | 4.80 | |
| Undershoot (100%) | ASO | / | 2.20 | 3.44 | / |
| MRFO | / | 2.7 | 4.14 | / | |
| PSO | / | 3.13 | 4.80 | / | |
| Response time (s) | ASO | 0.050 | 0.050 | 0.070 | 0.070 |
| MRFO | 0.055 | 0.055 | 0.072 | 0.072 | |
| PSO | 0.09 | 0.09 | 0.10 | 0.10 |
| Parameters | ASO-PID |
|---|---|
| Kp (voltage loop) | 0.4894 |
| Ki | 119.5418 |
| Kd | 9.6826 × 10−6 |
| Kp (Current loop) | 0.11 |
| Ki | 200 |
| Kd | 9.4868 × 10−8 |
| Optimization Algorithm | Overshoot (100%) | Settling Time (s) | Rise Time (s) | ITAE 1 (Voltage Loop) | ITAE 2 (Current Loop) | Fitness Function |
|---|---|---|---|---|---|---|
| ASO-proposed | 0.1574 | 0.0094 | 0.0035 | 6.5283 × 10−4 | 0.0077 | 0.0042 |
| ASO-PID | 15.8707 | 0.0366 | 0.0035 | 0.0046 | 0.0117 | 0.0088 |
| Parameters | Value |
|---|---|
| PEMFC-rated power, Pfc | 1.2 [KW] |
| PEMFC nominal voltage, Vfc | 26 [V] |
| Output voltage Vs | 100 [V] |
| Inductor L | 1 mH |
| Output capacitor C | 1100 μF |
| Switching frequency, Fs | 10 [kHz] |
| Sample time Ts | 10 μs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saadi, R.; Hammoudi, M.Y.; Salah, O.; Laadjal, K.; Cardoso, A.J.M. A Two-Degree-of-Freedom PID Integral Super-Twisting Controller Based on Atom Search Optimizer Applied to DC-DC Interleaved Converters for Fuel Cell Applications. Electronics 2023, 12, 4113. https://doi.org/10.3390/electronics12194113
Saadi R, Hammoudi MY, Salah O, Laadjal K, Cardoso AJM. A Two-Degree-of-Freedom PID Integral Super-Twisting Controller Based on Atom Search Optimizer Applied to DC-DC Interleaved Converters for Fuel Cell Applications. Electronics. 2023; 12(19):4113. https://doi.org/10.3390/electronics12194113
Chicago/Turabian StyleSaadi, Ramzi, Mohamed Yacine Hammoudi, Okba Salah, Khaled Laadjal, and Antonio J. Marques Cardoso. 2023. "A Two-Degree-of-Freedom PID Integral Super-Twisting Controller Based on Atom Search Optimizer Applied to DC-DC Interleaved Converters for Fuel Cell Applications" Electronics 12, no. 19: 4113. https://doi.org/10.3390/electronics12194113
APA StyleSaadi, R., Hammoudi, M. Y., Salah, O., Laadjal, K., & Cardoso, A. J. M. (2023). A Two-Degree-of-Freedom PID Integral Super-Twisting Controller Based on Atom Search Optimizer Applied to DC-DC Interleaved Converters for Fuel Cell Applications. Electronics, 12(19), 4113. https://doi.org/10.3390/electronics12194113