



A Study on the Development of ICT Convergence Smart ESP Using Embedded System


Abstract
:1. Introduction
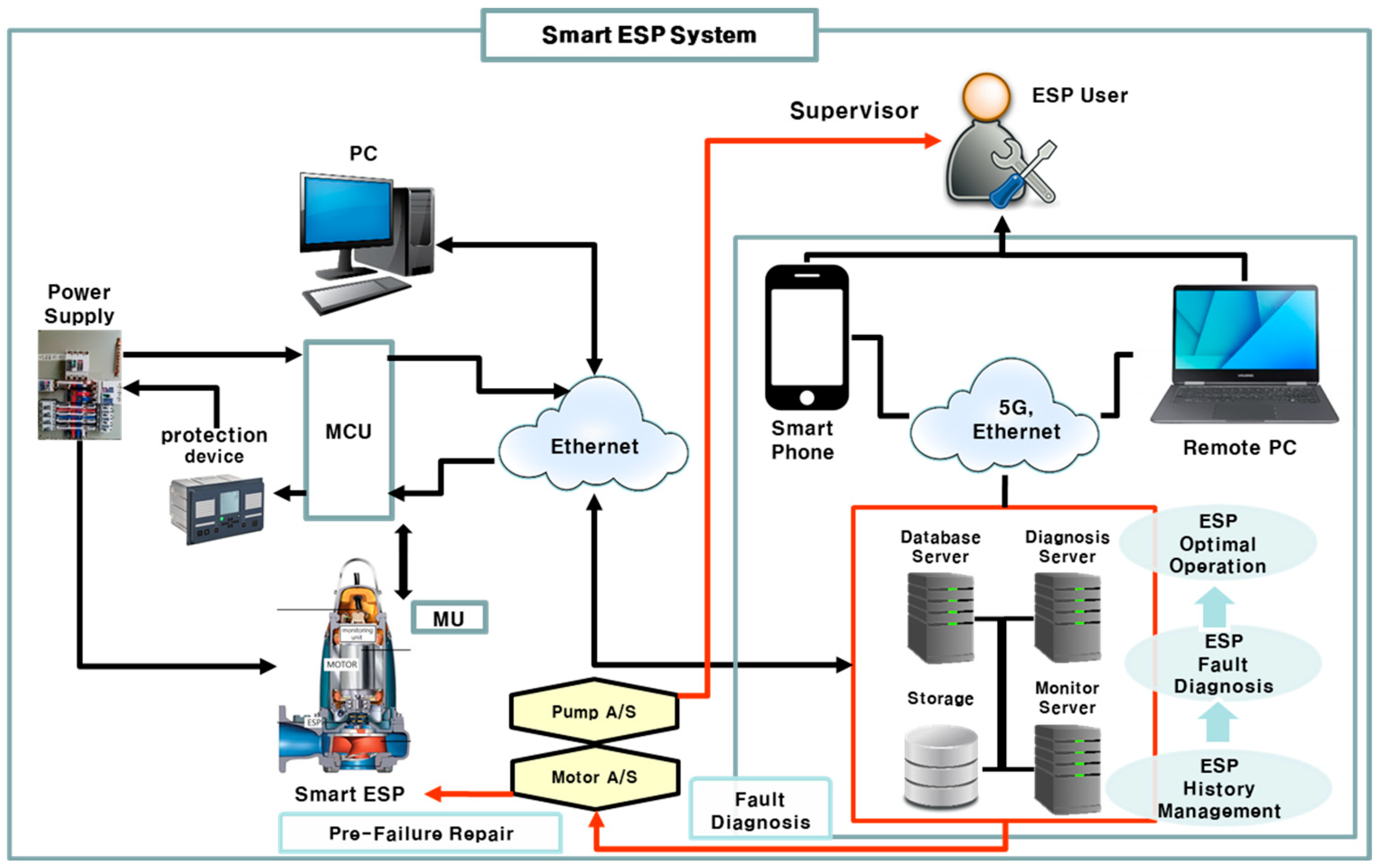
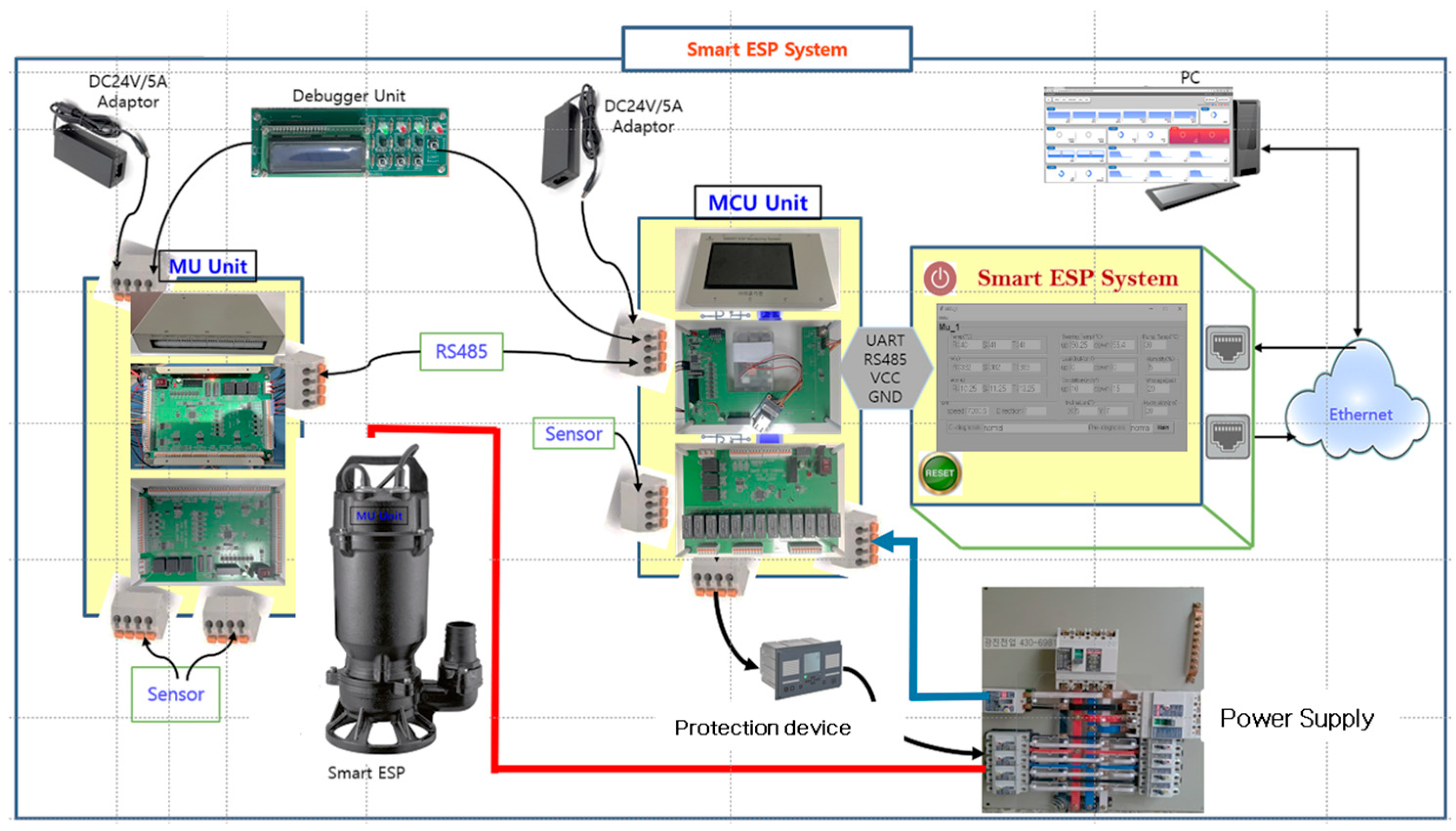
2. ICT Convergence ESP System Development
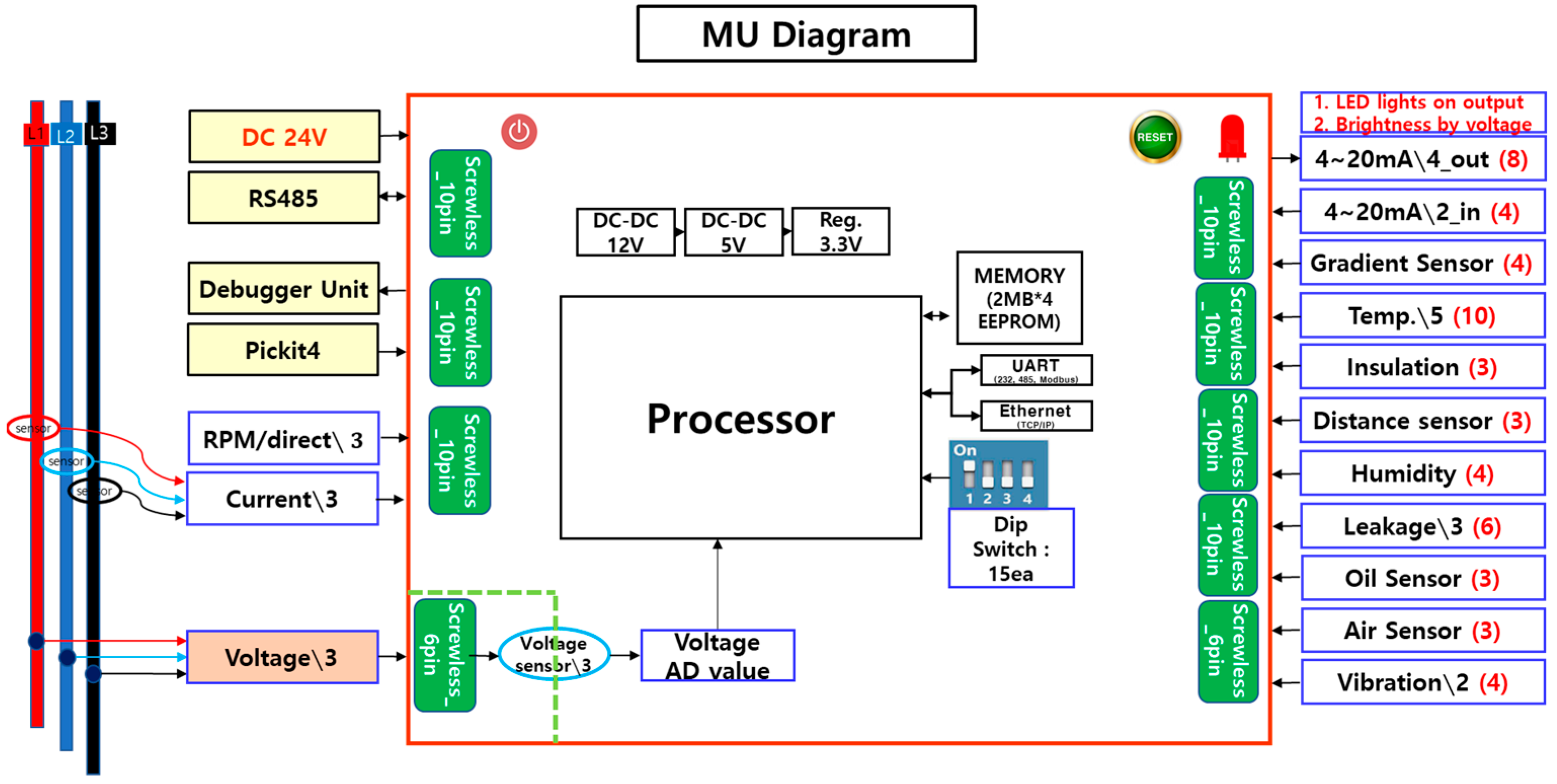
2.1. Submersible Pump Monitoring Unit Design
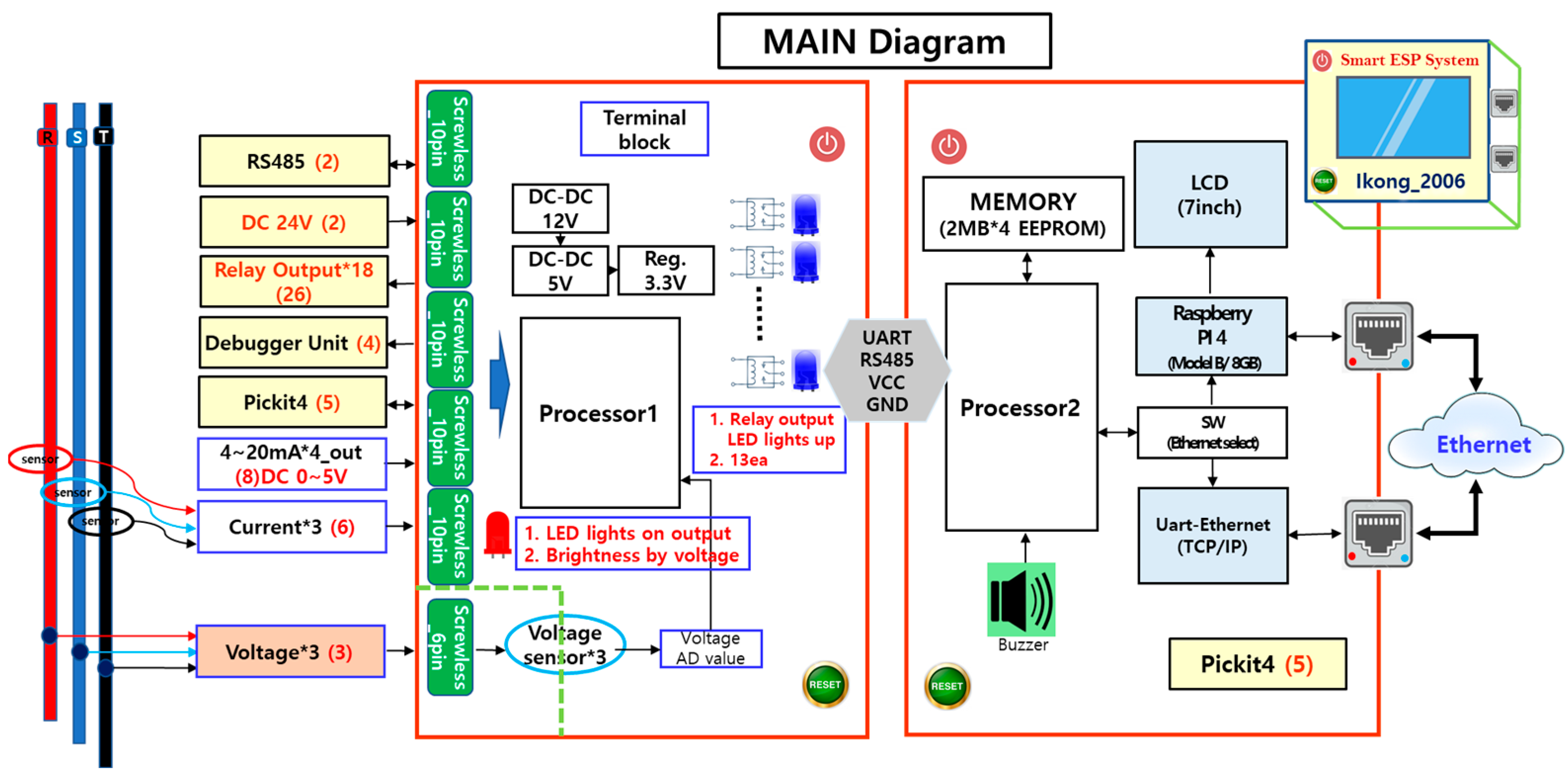
2.2. Design of Monitoring Control Unit of Submersible Pump
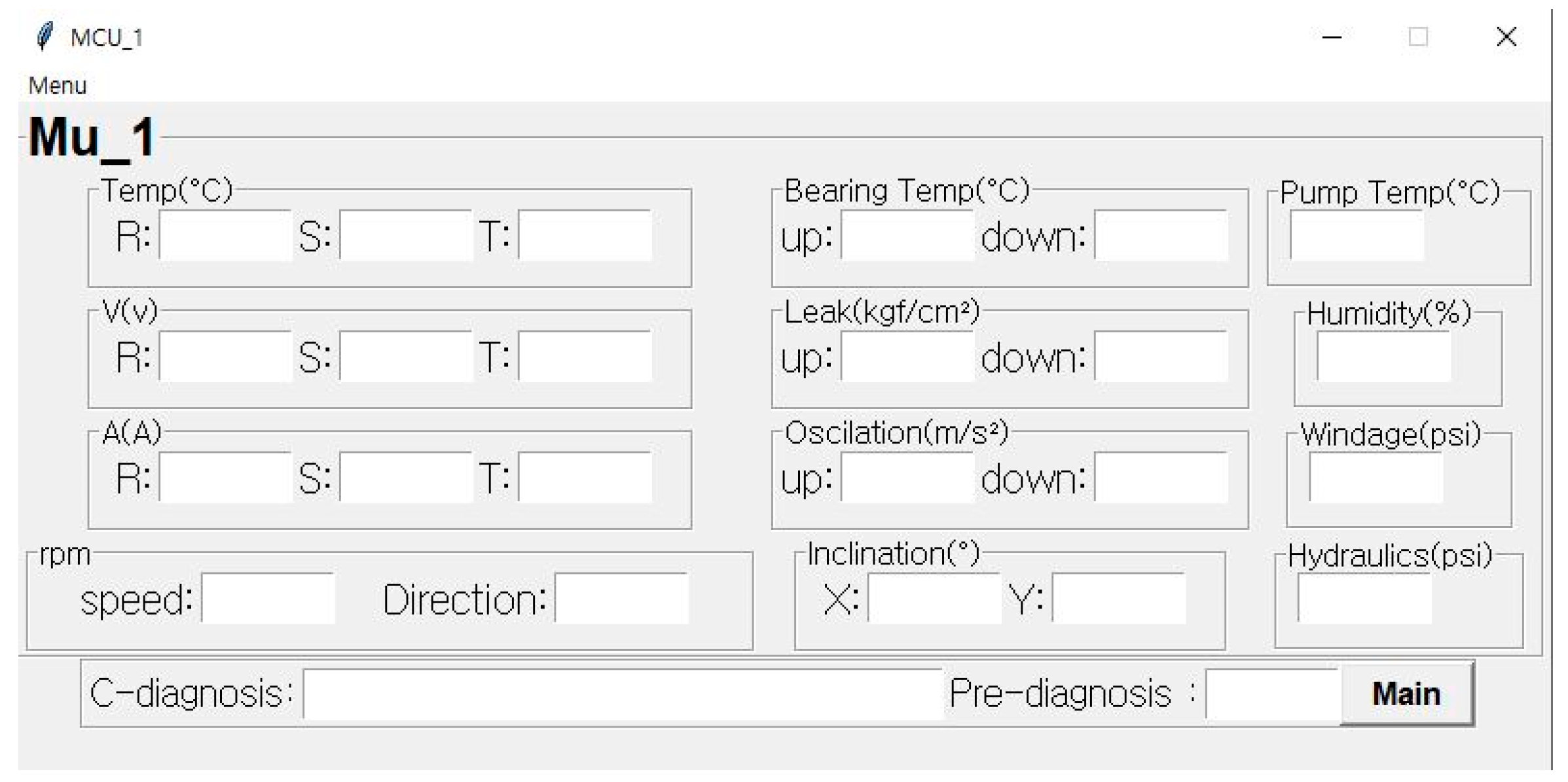
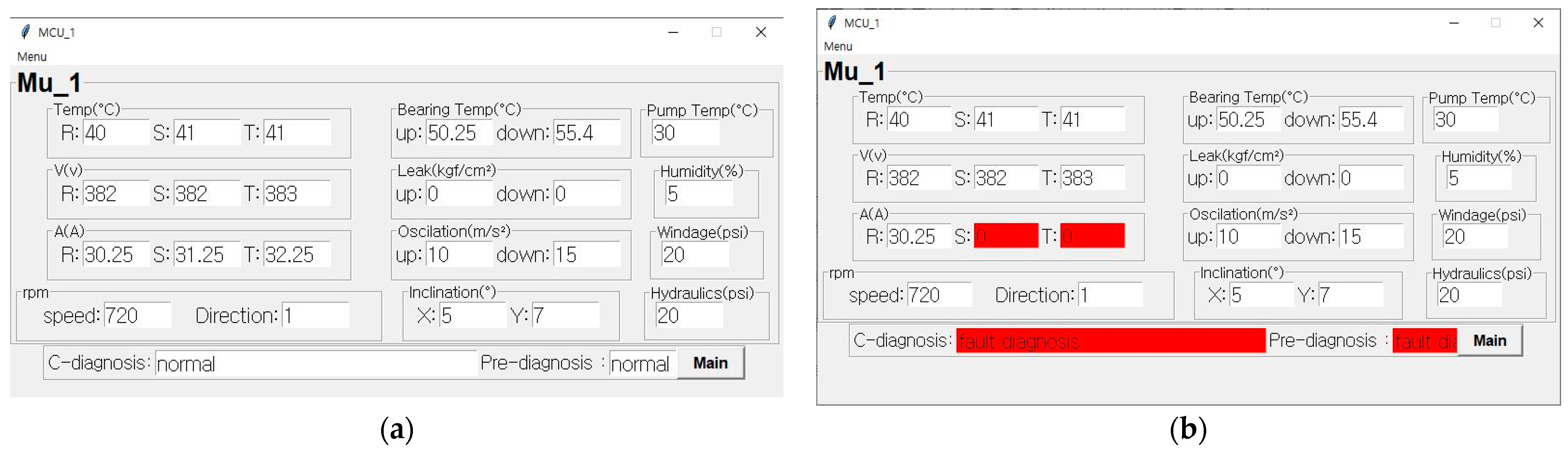
2.3. Monitoring of Embedded System
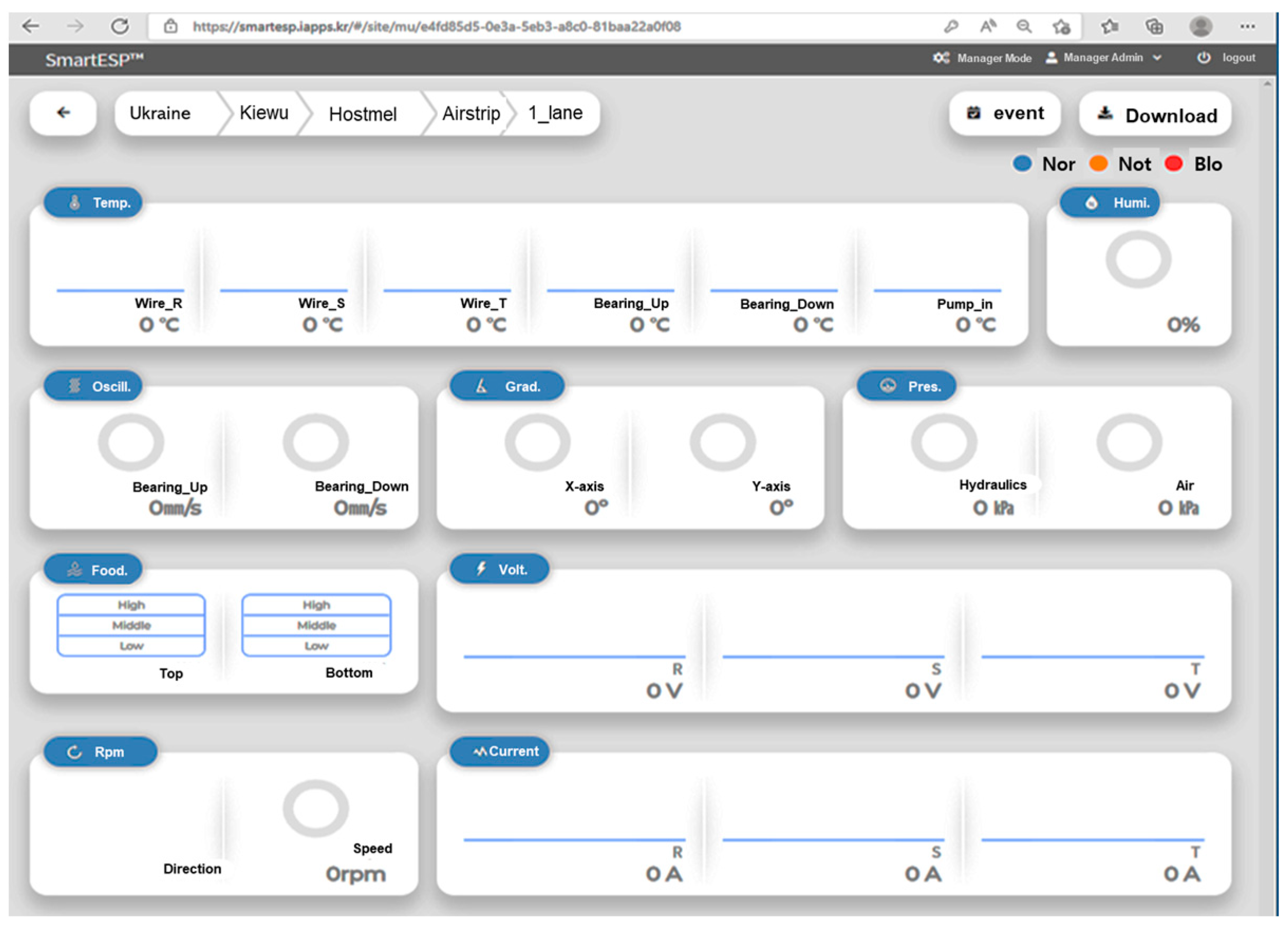
2.4. Monitoring of Server Computer
3. Failure Diagnosis Algorithm
3.1. Individual Fault Diagnosis Algorithm
- Acquisition of sensor information from MCU.
- Store the sensor information in the database.
- Comparing individual sensor values with reference values to determine ESP status as normal, caution, or blocked.
- The diagnosis result is transmitted to the MCU, and the MCU executes an action appropriate to the situation. (In case of blocking, a relay operation is executed.)
3.2. Complex Fault Diagnosis Algorithm
3.3. Failure Prediction Diagnosis Algorithm
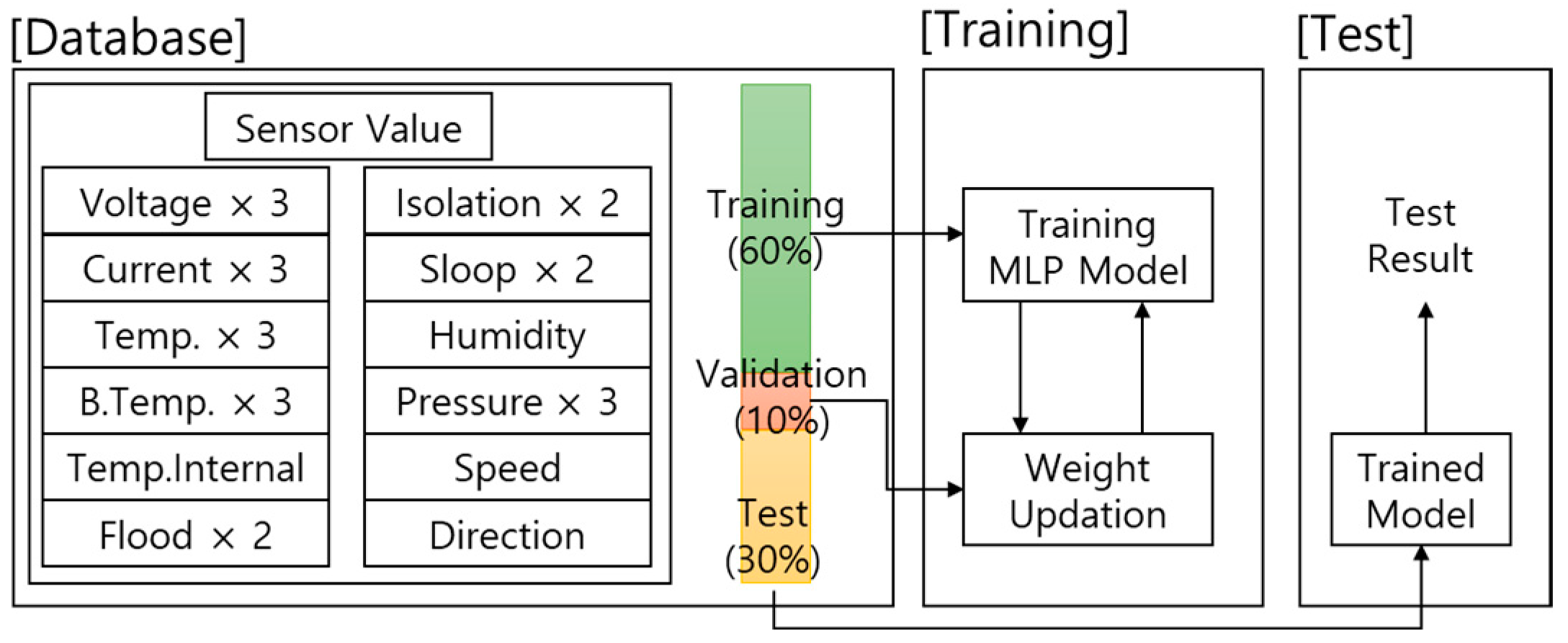
3.3.1. Failure Prediction Process
3.3.2. Multi-Layer Perceptron (MLP) Neural Network
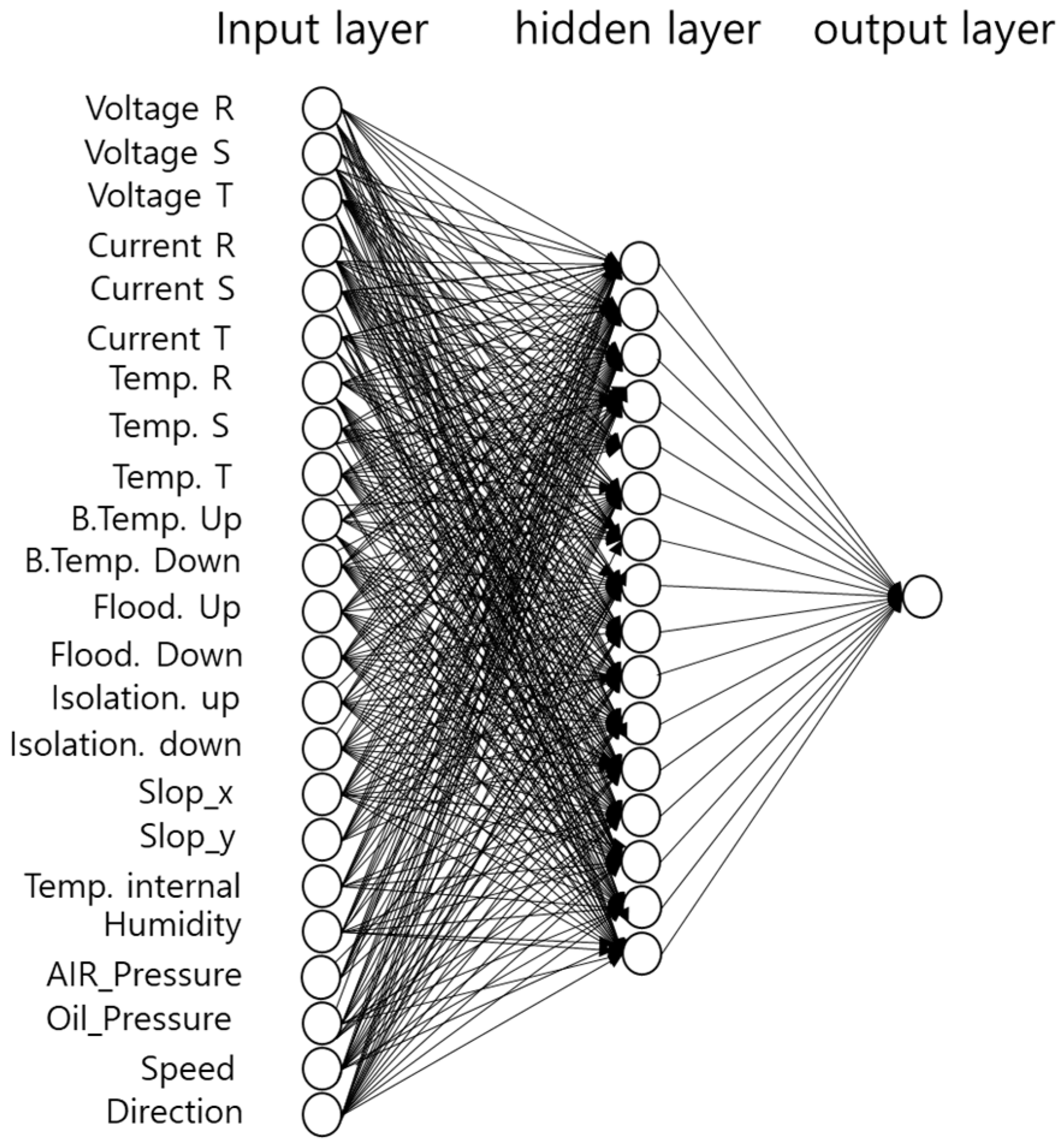
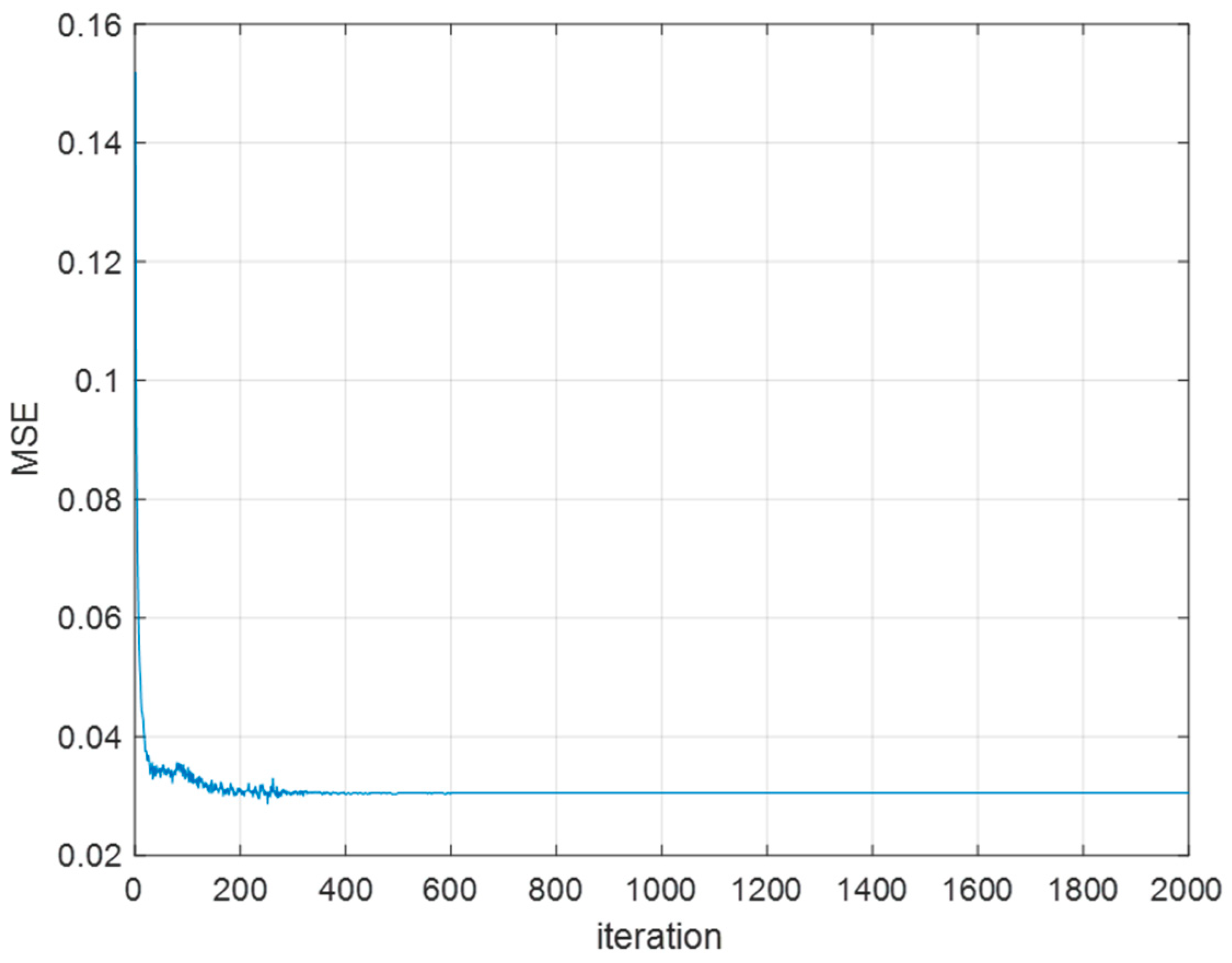
3.3.3. Network Design
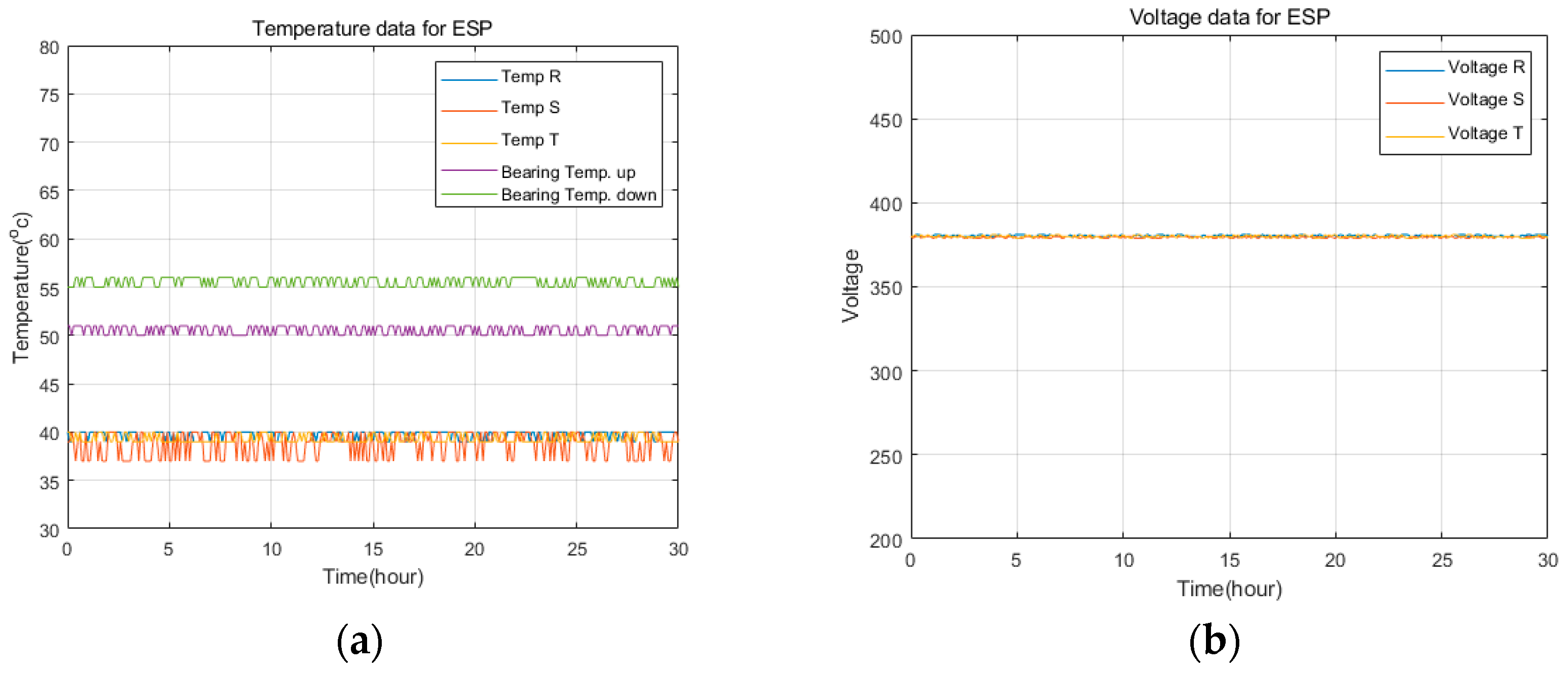
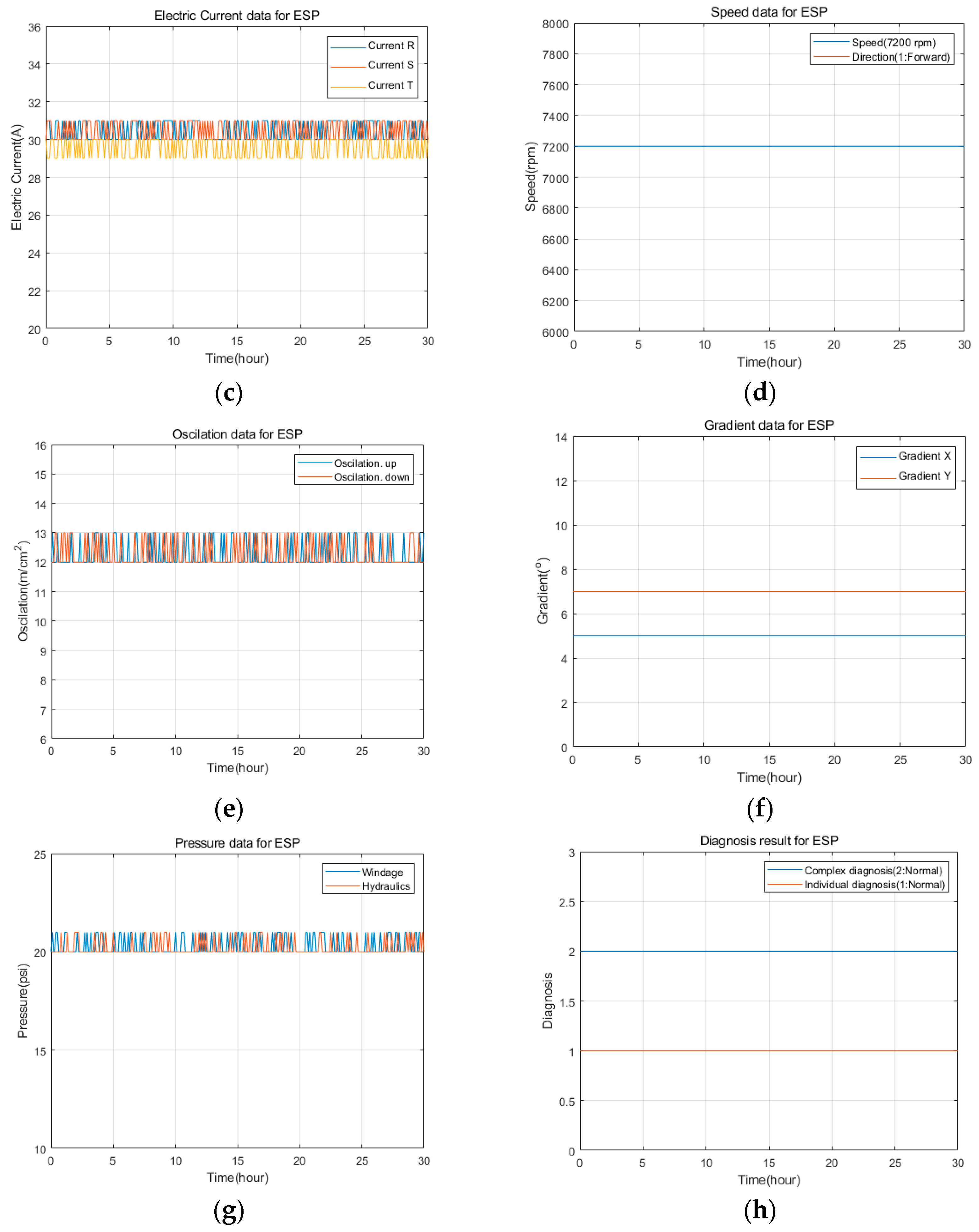
4. Simulation and Discussion
4.1. Simulation of the Proposed Method
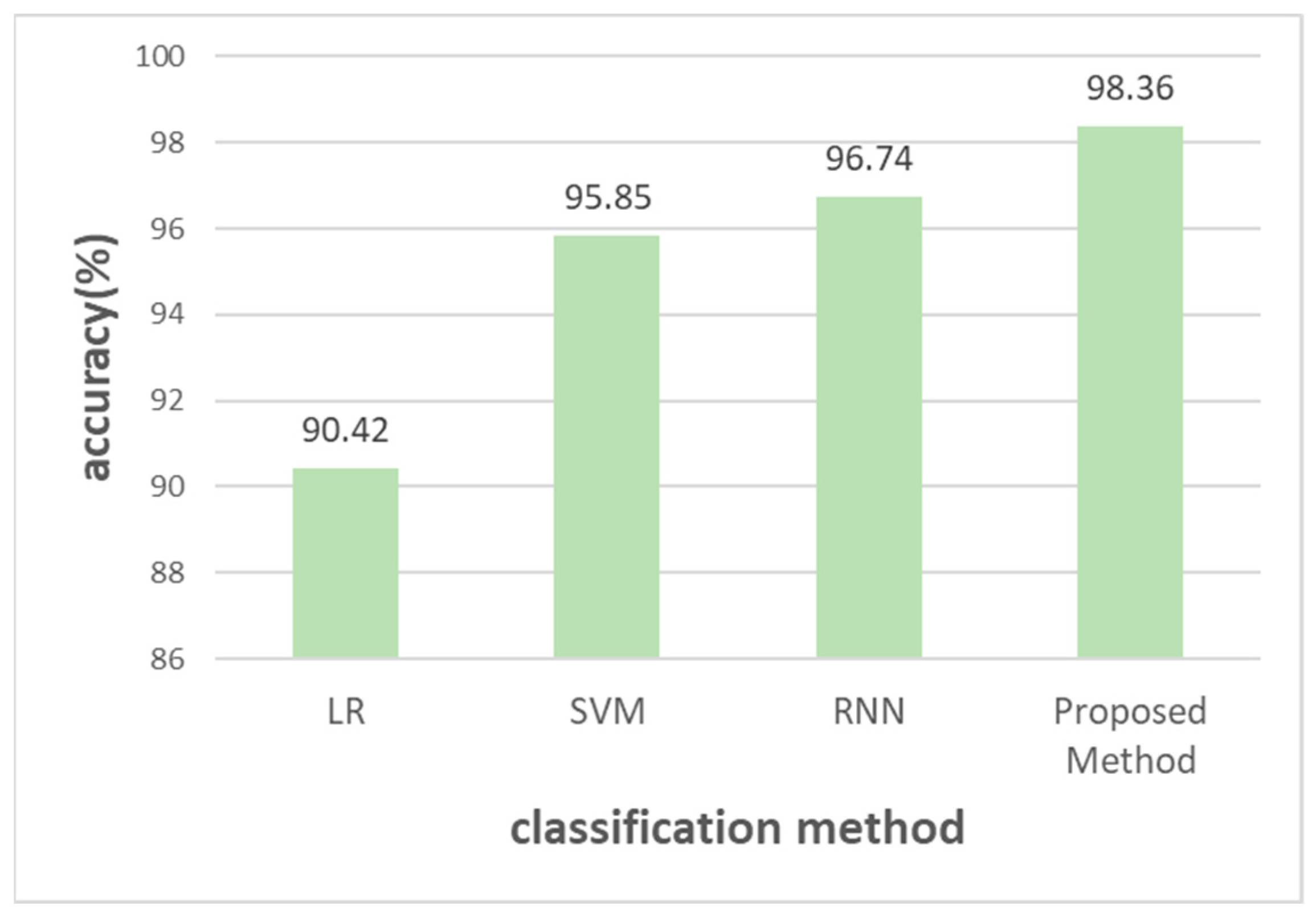
4.2. Comparison of Simulation Results
5. Conclusions
Funding
Conflicts of Interest
References
- Han, Y.; Song, Y. Condition monitoring techniques for electrical equipment-a literature survey. IEEE Trans. Power Deliv. 2013, 18, 4–13. [Google Scholar] [CrossRef]
- Alwodai, A. Motor Fault Diagnosis Using Higher Order Statistical Analysis of Motor Power Supply Parameters. Ph.D. Dissertation, University of Huddersfield, Huddersfield, UK, 2015. [Google Scholar]
- Stopa, M.M.; Cardoso Filho, B.J.; Martinez, C.B. Incipient detection of cavitation phenomenon in centrifugal pumps. IEEE Trans. Ind. Appl. 2014, 50, 120–126. [Google Scholar] [CrossRef]
- Tian, X. The investigation of motor current signals from a centrifugal pump for fault diagnosis. In Proceedings of the Comadem 2014, Brisbane, Australia, 16–18 September 2014. [Google Scholar]
- Harihara, P.P.; Parlos, A.G. Fault Diagnosis of Centrifugal Pumps Using Motor Electrical Signals; INTECH Open Access Publisher: Rang-du-Fliers, France, 2012. [Google Scholar]
- Sakthivel, N.; Sugumaran, V.; Babud, E.S. Vibration based fault diagnosis of monoblock centrifugal pump using decision tree. Expert Syst. Appl. 2010, 37, 4040–4049. [Google Scholar] [CrossRef]
- Muralidharan, V.; Sugumaran, V. A comparative study of Naï ve Bayes classifier and Bayes net classifier for fault diagnosis of monoblock centrifugal pump using wavelet analysis. Appl. Soft Comput. 2012, 12, 2023–2029. [Google Scholar] [CrossRef]
- Alfayez, L.; Mba, D.; Dyson, D. The application of acoustic emission for detecting incipient cavitation and the best efficiency point of a 60 kW centrifugal pump: Case study. Ndt E Int. 2005, 38, 354–358. [Google Scholar] [CrossRef] [Green Version]
- Al-Braik, A. Diagnosis of Impeller Faults in a Centrifugal Pump Using Vibration Signals. In Proceedings of the Eleventh International Conference on Condition Monitoring and Machinery Failure Prevention Technologies, Manchester, UK, 10–12 June 2014. [Google Scholar]
- Panadero, R.P. Improved resolution of the MCSA method via Hilbert transform enabling the diagnosis of rotor asymmetries at very low slip. IEEE Trans. Energy Convers. 2009, 1, 52–59. [Google Scholar] [CrossRef]
- Xiao, D.; Huang, Y.; Zhang, X.; Shi, H.; Liu, C.; Li, Y. Fault Diagnosis of Asynchronous Motors Based on LSTM Neural Network. In Proceedings of the 2018 Prognostics and System Health Management Conference, Chongqing, China, 26–28 October 2018; pp. 540–545. [Google Scholar]
- El Said, A.; Wild, B.; Higgins, J.; Desell, T. Using LSTM Recurrent Neural Networks to Predict Excess Vibration Events in Aircraft Engines. In Proceedings of the 2016 IEEE 12th International Conference on e-Science, Baltimore, MD, USA, 23–27 October 2016; pp. 260–269. [Google Scholar]
- Wang, R.; Feng, Z.; Huang, S.; Fang, X.; Wang, J. Research on Voltage Waveform Fault Detection of Miniature Vibration Motor Based on Improved WP-LSTM. Micromachines 2020, 11, 753. [Google Scholar] [CrossRef] [PubMed]
- ElSaid, A.; El Jamiy, F.; Higgins, J.; Wild, B.; Desell, T. Optimizing Long Short-Term Memory Recurrent Neural Networks Using Ant Colony Optimization to Predict Turbine Engine Vibration. Appl. Soft Comput. 2018, 73, 969–991. [Google Scholar] [CrossRef] [Green Version]
- Xiao, D.; Huang, Y.; Qin, C.; Shi, H.; Li, Y. Fault Diagnosis of Induction Motors Using Recurrence Quantification Analysis and LSTM with Weighted BN. Shock Vib. 2019, 2019, 8325218. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.G.; Huang, H.Z.; Li, Y.F. A Bidirectional LSTM Prognostics Method Under Multiple Operational Conditions. IEEE Trans. Ind. Electron. 2019, 66, 8792–8802. [Google Scholar] [CrossRef]
- Lee, K.; Kim, J.K.; Kim, J.; Hur, K.; Kim, H. Stacked Convolutional Bidirectional LSTM Recurrent Neural Network for Bearing Anomaly Detection in Rotating Machinery Diagnostics. In Proceedings of the 2018 1st IEEE International Conference on Knowledge Innovation and Invention, Jeju, Republic of Korea, 23–27 July 2018; pp. 98–101. [Google Scholar]
- Xu, H.; Ma, R.; Yan, L.; Ma, Z. Two-stage Prediction of Machinery Fault Trend based on Deep Learning for Time Series Analysis. Digit. Signal Process. 2021, 117, 103150. [Google Scholar]
- Yan, W.; Wang, J.; Lu, S.; Zhou, M.; Peng, X. A Review of Real-Time Fault Diagnosis Methods for Industrial Smart Manufacturing. Processes 2023, 11, 369. [Google Scholar] [CrossRef]
- Zhu, J.; Ma, H.; Ji, L.; Zhuang, J.; Wang, J.; Liu, B. Vibration Trend Prediction of Pumped Storage Units based on VMD and GRU. In Proceedings of the 2020 5th International Conference on Mechanical, Control and Computer Engineering 2020, Harbin, China, 25–27 December 2020; pp. 180–183. [Google Scholar]
- Zhao, K.; Shao, H. Intelligent Fault Diagnosis of Rolling Bearing Using Adaptive Deep Gated Recurrent Unit. Neural Process. Lett. 2020, 51, 1165–1184. [Google Scholar] [CrossRef]
- Zhao, K.; Jiang, H.; Li, X.; Wang, R. An Optimal Deep Sparse Autoencoder with Gated Recurrent Unit for Rolling Bearing Fault Diagnosis. Meas. Sci. Technol. 2019, 31, 015005. [Google Scholar] [CrossRef]
- Zhang, X.; Cong, Y.; Yuan, Z.; Zhang, T.; Bai, X. Early Fault Detection Method of Rolling Bearing Based on MCNN and GRU Network with an Attention Mechanism. Shock. Vib. 2021, 2021, 6660243. [Google Scholar] [CrossRef]
- Yuan, M.; Wu, Y.; Lin, L. Fault Diagnosis and Remaining Useful Life Estimation of Aero Engine using LSTM Neural Network. In Proceedings of the 2016 IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 135–140. [Google Scholar]
- Chen, B.; Peng, Y.; Gu, B.; Luo, Y.; Liu, D. A Fault Detection Method Based on Enhanced GRU. In Proceedings of the 2021 International Conference on Sensing, Measurement and Data Analytics in the Era of Artificial Intelligence (ICSMD), Nanjing, China, 21–23 October 2021; pp. 1–4. [Google Scholar]
- Zhang, L.; Liu, P.; Zhao, L.; Wang, G.; Zhang, W.; Liu, J. Air Quality Predictions with a Semi-supervised Bidirectional LSTM Neural Network. Atmos. Pollut. Res. 2021, 12, 328–339. [Google Scholar] [CrossRef]
- Qin, H. Comparison of Deep Learning Models on Time Series Forecasting: A Case Study of Dissolved Oxygen Prediction. arXiv 2019, arXiv:1911.08414. [Google Scholar]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. The Performance of LSTM and BiLSTM in Forecasting Time Series. In Proceedings of the 2019 IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3285–3292. [Google Scholar]
- Hollis, T.; Viscardi, A.; Yi, S.E. A Comparison of LSTMs and Attention Mechanisms for Forecasting Financial Time Series. arXiv 2018, arXiv:1812.07699. [Google Scholar]
- Chung, J.; Gülçehre, Ç.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural Machine Translation by Jointly Learning to Align and Translate. In Proceedings of the 3rd International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Division | Sensor Type | Measuring Range | |
|---|---|---|---|
| Temperature | Winding (L1,L2,L3) | PT 100 (Line type) | −20~200 °C |
| Bearing (up, down) | PT l00 (Volt type) | −20~200 °C | |
| Leak | up, down | Self-production | Dry/Flooding |
| Gradient | SINVT | x,y (−90~90 °C)/0.1% | |
| Pressure | Oil | CYYZ 31-A1-19 | 0~100 kpa (0.25%FS) |
| Air | PSS-01A-R1 | 0~100 kpa (1%FS) | |
| Oscillation | Bearing (up, down) | EVT-101-VR20-05 | 0~20 mm/s (5%FS) |
| Humidity | WTS3535 | 0~100 RH% (3%FS) | |
| Voltage (L1, L2, L3) | Trans | 0~600 V | |
| Electric Current | CT | 0~120 A | |
| Rotation Speed | PR12-2DP | 0~7200 rpm | |
| Measurement Factor | Division | Level | Sensor Value |
|---|---|---|---|
| Voltage | over | block | 380 V (+10% or more) |
| caution | 380 V (+5%~less than +10%) | ||
| low | block | 380 V (−20% or less) | |
| caution | 380 V (−10%~less then −20%) | ||
| Electric current | over | block | 30 A (+20% or more) |
| caution | 30 A (+10%~less than +20%) | ||
| Temperature (Winding) | high | block | 100 °C (+20% or more) |
| caution | 100 °C (+5~less than +20) | ||
| Temperature (Bearing) | high | block | 100 °C or more |
| caution | 80 °C more less than 100) | ||
| Humidity | high | block | 80% or more |
| caution | 70~less than 80% | ||
| Direction of rotation | reverse | block | in the negative direction |
| Oscillation | - | block | average (+20% or more) |
| caution | average (+10~less than +20%) | ||
| Gradient | - | block | {x-axis (±10 or more)} or {y-axis (±10 or more) |
| caution | {x-axis (±5~less then ±10)} or {y-axis (±5~±10 or more)} | ||
| Flooding | - | block | High (Level-3, 4) or more |
| caution | Middle (Level-2) | ||
| Pressure (Oil/Air) | - | block | average (±10% or more) |
| caution | average (+5%~less than +10%) |
| Diagnosis Type | Level | Sensor | ||||||
|---|---|---|---|---|---|---|---|---|
| Voltage | Current | Temperature | Speed | Oscillation | Pressure (Oil) | |||
| Power | misconnection | block | 380 V ± 10% less | 30 A + 5% less | - | −720 rpm (±5% less) | - | - |
| phase loss | block | 1~2 phase voltage 0 V | 1~2 line current 0 A | - | 720 rpm (±50% more) | - | - | |
| Motor | winding open | block | 380 V ± 10% less | 1~2 line current 0 A | - | 720 rpm (±50% more) | - | |
| inter layer short circuit | block | 380 V ± 10% less | Two currents are reduced by more than 10% than the average current. | - | - | - | ||
| caution | 380 V ± 10% less | The two currents are reduced by 5~10% less than the average current. | - | - | - | |||
| rotor failure | block | 380 V ± 10% less | 1 current decreases by more than 10% than the average current. | - | - | average 15% more | ||
| caution | 380 V ± 10% less | 1 current is reduced by 5% to 10% less than the average current. | - | - | average 10~15% more | |||
| bearing failure | block | 380 V ± 10% less | 30 A + 5% less | Bearing over 90 °C | - | average (15% more) | average | |
| caution | 380 V ± 10% less | 30 A + 5% less | Bearing less than 80~90 °C | - | average (10~15% less) | average | ||
| oil loss | block | 380 V ± 10% less | 30 A + 5% less | - | - | - | average 10% less | |
| caution | 380 V ± 10% less | 30 A + 5% less | - | - | - | average 5~10% less | ||
| ESP | stuck | data | 380 V ± 10% less | 30 A 1.1 more | - | 720 rpm 0.9 less | average (15% more) | - |
| Number of Neurons in the Hidden Layer | Test Set Accuracy | Number of Neurons in the Hidden Layer | Test Set Accuracy |
|---|---|---|---|
| 2 | 0.436333 | 20 | 0.949000 |
| 4 | 0.798333 | 30 | 0.938500 |
| 8 | 0.911167 | 32 | 0.927667 |
| 10 | 0.949000 | 40 | 0.914167 |
| 16 | 0.963833 | 64 | 0.850000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, J.-H. A Study on the Development of ICT Convergence Smart ESP Using Embedded System. Electronics 2023, 12, 1351. https://doi.org/10.3390/electronics12061351
Cho J-H. A Study on the Development of ICT Convergence Smart ESP Using Embedded System. Electronics. 2023; 12(6):1351. https://doi.org/10.3390/electronics12061351
Chicago/Turabian StyleCho, Joon-Ho. 2023. "A Study on the Development of ICT Convergence Smart ESP Using Embedded System" Electronics 12, no. 6: 1351. https://doi.org/10.3390/electronics12061351
APA StyleCho, J. -H. (2023). A Study on the Development of ICT Convergence Smart ESP Using Embedded System. Electronics, 12(6), 1351. https://doi.org/10.3390/electronics12061351