



Research and Implementation of Low-Power Anomaly Recognition Method for Intelligent Manhole Covers


Abstract
:1. Introduction
2. Manhole Cover Attitude Recognition Circuit
2.1. Scheme of Attitude Sensor
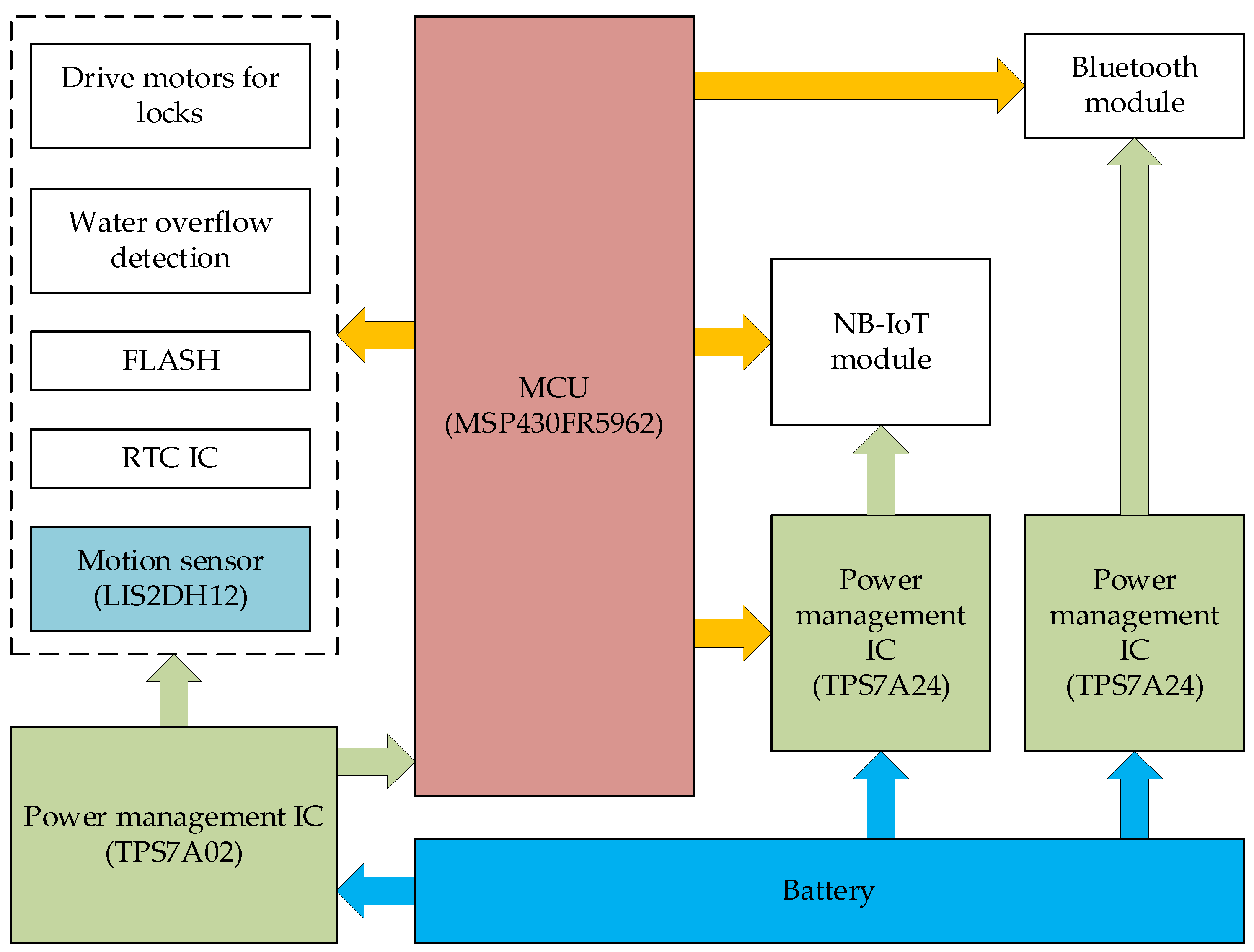
2.2. Circuit Design
3. Low-Power Management for Posture Recognition
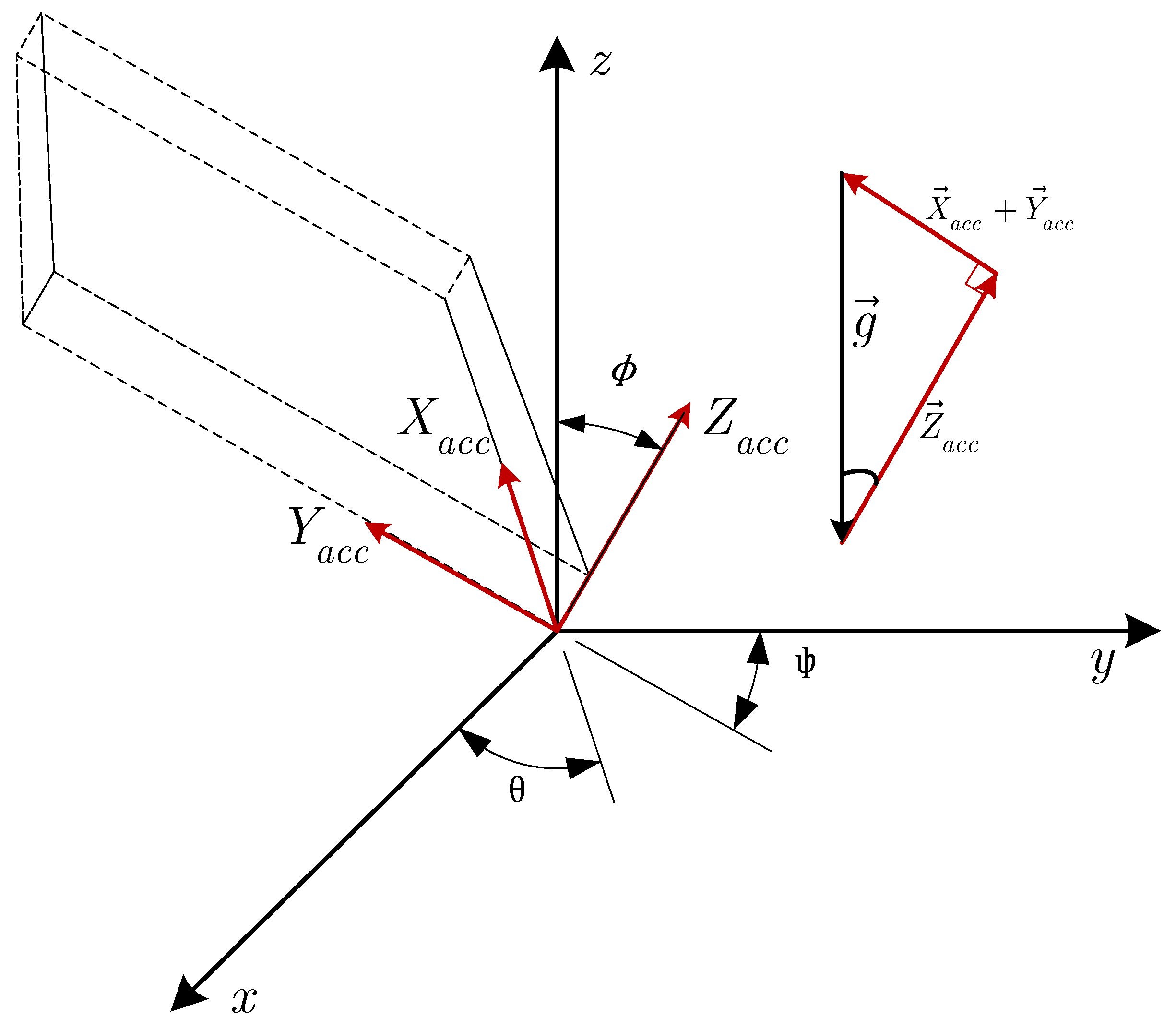
3.1. Pose Data Fusion Analysis in Dormant State
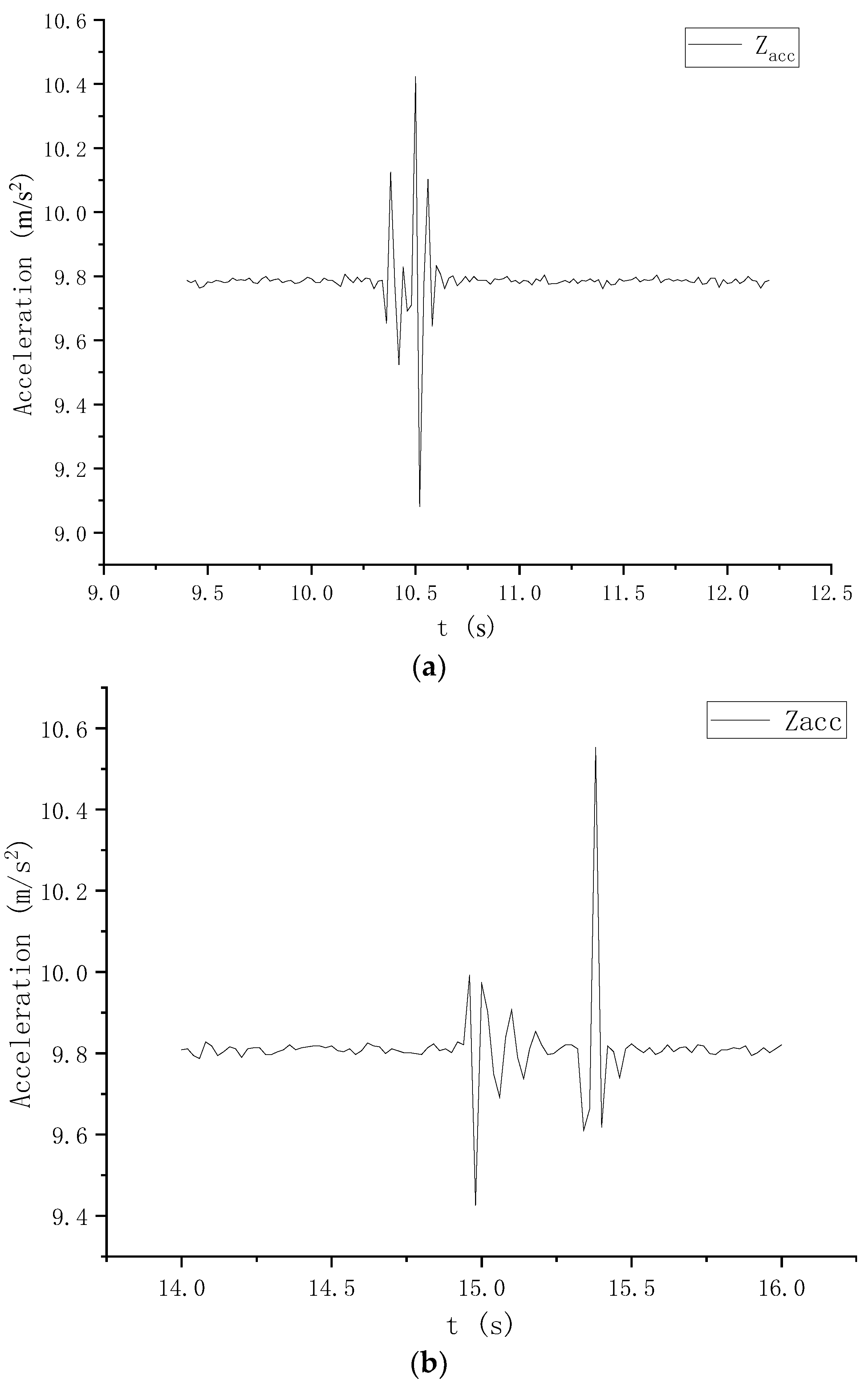
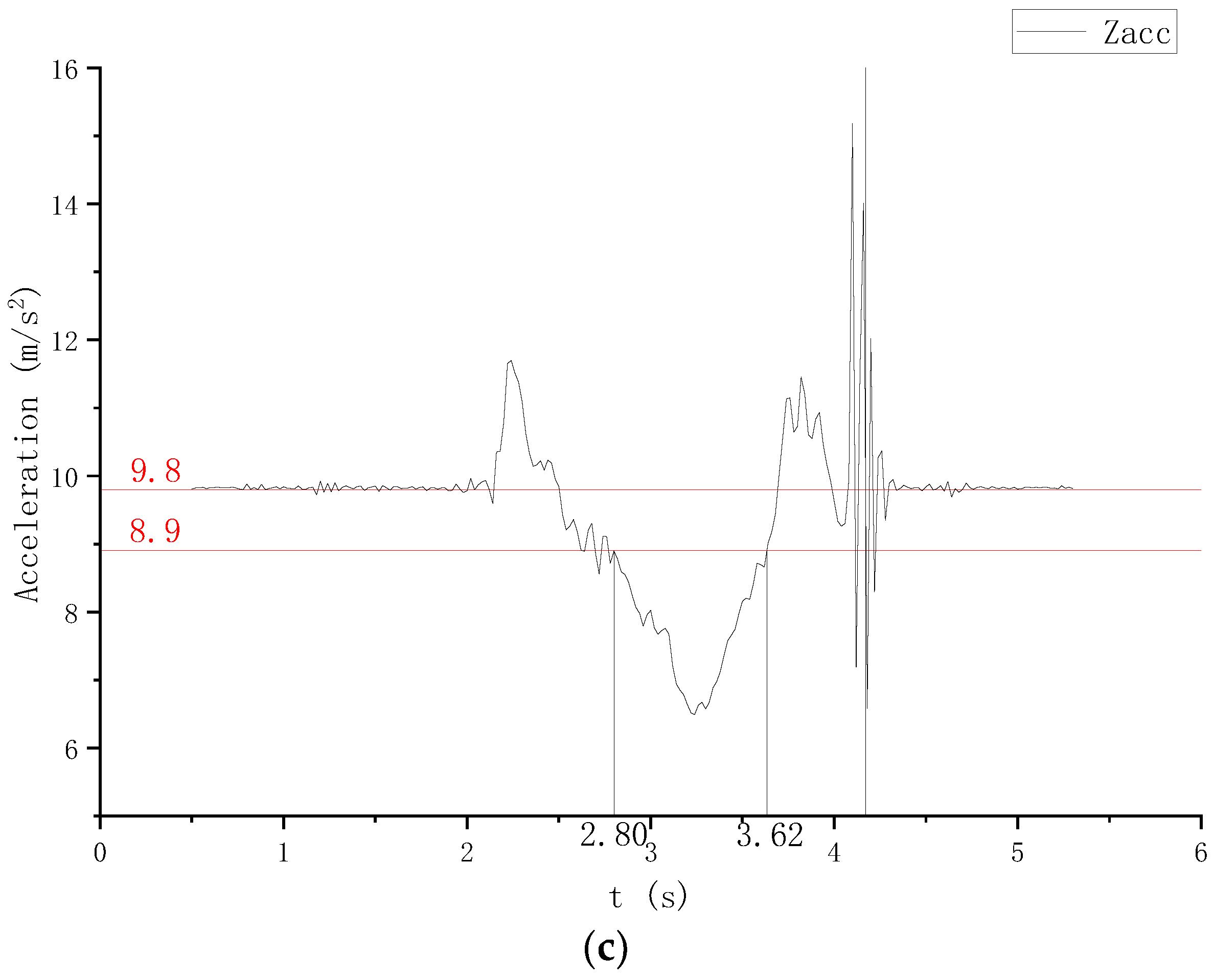
3.2. Intelligent Manhole Cover Abnormal Event Recognition
3.3. Algorithm for Pose Recognition in Wake State
4. Low Power Management of the System
4.1. System Low-Power Implementation
4.2. Identification Test of the System
4.3. Actual Power Consumption Test
4.4. Experimental Discussion
5. Summary
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, C.; Gu, S.; Guo, G.; Liu, X.; Liu, L.; Zhao, J. Alarm method of communication intelligent manhole cover based on multiple event fusion. EURASIP J. Wirel. Commun. Netw. 2021, 2021, 173. [Google Scholar] [CrossRef]
- Jia, G.; Han, G.; Rao, H.; Shu, L. Edge Computing-Based Intelligent Manhole Cover Management System for Smart Cities. IEEE Internet Things J. 2018, 5, 1648–1656. [Google Scholar] [CrossRef]
- Savic, D.A.; Bicik, J.; Morley, M.S.; Duncan, A.; Kapelan, Z.; Djordjevic, S.; Keedwell, E.C. Intelligent Urban Water Infrastructure Management. J. Indian Inst. Sci. 2013, 93, 319–336. [Google Scholar]
- Xie, Y.; Wang, H.; Liu, J.; Zhang, R.; Guo, Y. On A Working Monitoring System of Manhole Wells Based on Technology of Internet of Things. In Proceedings of the 2021 6th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 9–11 April 2021; pp. 1452–1455. [Google Scholar]
- Luo, M.; Zhou, Z.; Li, H.; Yan, L. Research and development of the smart telemonitor system for power cable tunnel. In Proceedings of the IEEE PES T&D 2010, New Orleans, LA, USA, 19–22 April 2010; pp. 1–5. [Google Scholar]
- Ke, B.; Mao, D. Design of manhole covers missing alarm monitoring and management system. In Proceedings of the 2017 IEEE 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 December 2017; pp. 682–686. [Google Scholar]
- Liu, Y.; Du, M.; Jing, C.; Bai, Y. Design of supervision and management system for ownerless manhole covers based on RFID. In Proceedings of the 2013 21st International Conference on Geoinformatics, Kaifeng, China, 20–22 June 2013; pp. 1–4. [Google Scholar]
- Chongbiao, Z.; Mingbo, Q.; Long, C.; Qi, G.; Jiajia, S.; Jinbo, Z. Research on an Intelligent Monitoring Device for Cable Manhole Covers. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 103–106. [Google Scholar]
- GB/T 41401-2022; Intelligent Manhole Cover. Standards Press of China: Beijing, China, 2022.
- Xuan, L.; Hesheng, Z.; Lei, L. Research on LoRa Communication Performance in Manhole Cover Monitoring. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019; pp. 1–6. [Google Scholar]
- Guo, X.; Liu, B.; Wang, L. Design and Implementation of Intelligent Manhole Cover Monitoring System Based on NB-IoT. In Proceedings of the 2019 International Conference on Robots & Intelligent System (ICRIS), Haikou, China, 15–16 June 2019; pp. 207–210. [Google Scholar]
- Guan, Y.; Hou, Q. Design of Intelligent Well Cover Monitoring System Based on Lora. In Proceedings of the 2021 5th International Conference on Communication and Information Systems (ICCIS), Chongqing, China, 15–17 October 2021; pp. 119–123. [Google Scholar]
- Tang, N.; Mu, X.; Li, L.; Ce, L.; Jiang, X. Manhole detection and location for urban pavement. In Proceedings of the 2003 IEEE International Conference on Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; Volume 1552, pp. 1552–1555. [Google Scholar]
- Jayasuriya, M.; Ranasinghe, R.; Dissanayake, G. Active Perception for Outdoor Localisation with an Omnidirectional Camera. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 4567–4574. [Google Scholar]
- Sultani, W.; Mokhtari, S.; Yun, H. Automatic Pavement Object Detection Using Superpixel Segmentation Combined with Conditional Random Field. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2076–2085. [Google Scholar] [CrossRef]
- Wei, Z.; Yang, M.; Wang, L.; Ma, H.; Chen, X.; Zhong, R. Customized Mobile LiDAR System for Manhole Cover Detection and Identification. Sensors 2019, 19, 2422. [Google Scholar] [CrossRef] [PubMed]
- Chung, K.L.; Cheng, Y.Y. Effective Source-Aware Domain Enhancement and Adaptation for CNN-Based Object Segmentation. IEEE Access 2020, 8, 149931–149939. [Google Scholar] [CrossRef]
- Chhabra, R.; Krishna, C.R.; Verma, S. A survey on state-of-the-art road surface monitoring techniques for intelligent transportation systems. Int. J. Sens. Netw. 2021, 37, 81–99. [Google Scholar] [CrossRef]
- Jeong, S.; Chappell, W.J. Adaptive composite antennas for a city-wide sensor network. IET Microw. Antennas Propag. 2010, 4, 1916–1926. [Google Scholar] [CrossRef]
- Jeong, S.; Chappell, W.J. A City-Wide Smart Wireless Sewer Sensor Network Using Parasitic Slot Array Antennas. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 760–763. [Google Scholar] [CrossRef]
- Seongheon, J.; Chin-Lung, Y.; Courter, J.R.; Seung-il, K.; Pipes, R.B.; Chappell, W.J. Multilayer composite for below ground embedded sensor networking. In Proceedings of the 2008 IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–11 July 2008; pp. 1–4. [Google Scholar]
- Mastarone, J.F.; Chappell, W.J. Urban sensor networking using thick slots in manhole covers. In Proceedings of the 2006 IEEE Antennas and Propagation Society International Symposium, Albuquerque, NM, USA, 9–14 July 2006; pp. 779–782. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | Parameters |
|---|---|
| Operating voltage | 1.71 V–3.6 V |
| Operating temperature | (−40 °C~+85 °C) |
| Lowest power consumption | 2 μA |
| Optional full-scale range | ±2 g/±4 g/±8 g/±16 g |
| Resolution | 1–192 mg/digit |
| Output interface | I2C/SPI |
| Number of independently programmable interrupts | 2 |
| Events | Number of Times | Anomalies | Error Rate |
|---|---|---|---|
| Vehicle crushing | 100 | 0 | 0% |
| Pedestrian trampling | 100 | 0 | 0% |
| Well cover opened | 100 | 100 | 0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, J.; Wang, K.; Sun, J.; Jia, Y. Research and Implementation of Low-Power Anomaly Recognition Method for Intelligent Manhole Covers. Electronics 2023, 12, 1926. https://doi.org/10.3390/electronics12081926
Guo J, Wang K, Sun J, Jia Y. Research and Implementation of Low-Power Anomaly Recognition Method for Intelligent Manhole Covers. Electronics. 2023; 12(8):1926. https://doi.org/10.3390/electronics12081926
Chicago/Turabian StyleGuo, Jiahu, Kai Wang, Jianquan Sun, and Youcheng Jia. 2023. "Research and Implementation of Low-Power Anomaly Recognition Method for Intelligent Manhole Covers" Electronics 12, no. 8: 1926. https://doi.org/10.3390/electronics12081926
APA StyleGuo, J., Wang, K., Sun, J., & Jia, Y. (2023). Research and Implementation of Low-Power Anomaly Recognition Method for Intelligent Manhole Covers. Electronics, 12(8), 1926. https://doi.org/10.3390/electronics12081926