
A Proof-of-Multiple-State Consensus Mechanism for Mobile Nodes in Internet of Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- We achieve consensus in different partitions and manage it uniformly through a two-layer chain to speed up the consensus process.
- (2)
- We have developed a consensus on speed change factors for mobile nodes in the network so that they can adapt to dynamic networks.
- (3)
- Based on this, we propose the PoMS consensus algorithm that takes multiple factors into account to evaluate vehicle levels and filter out better relay nodes based on this. The experiment shows that our method improves efficiency and security.
2. Related Work
3. Proposed System Model
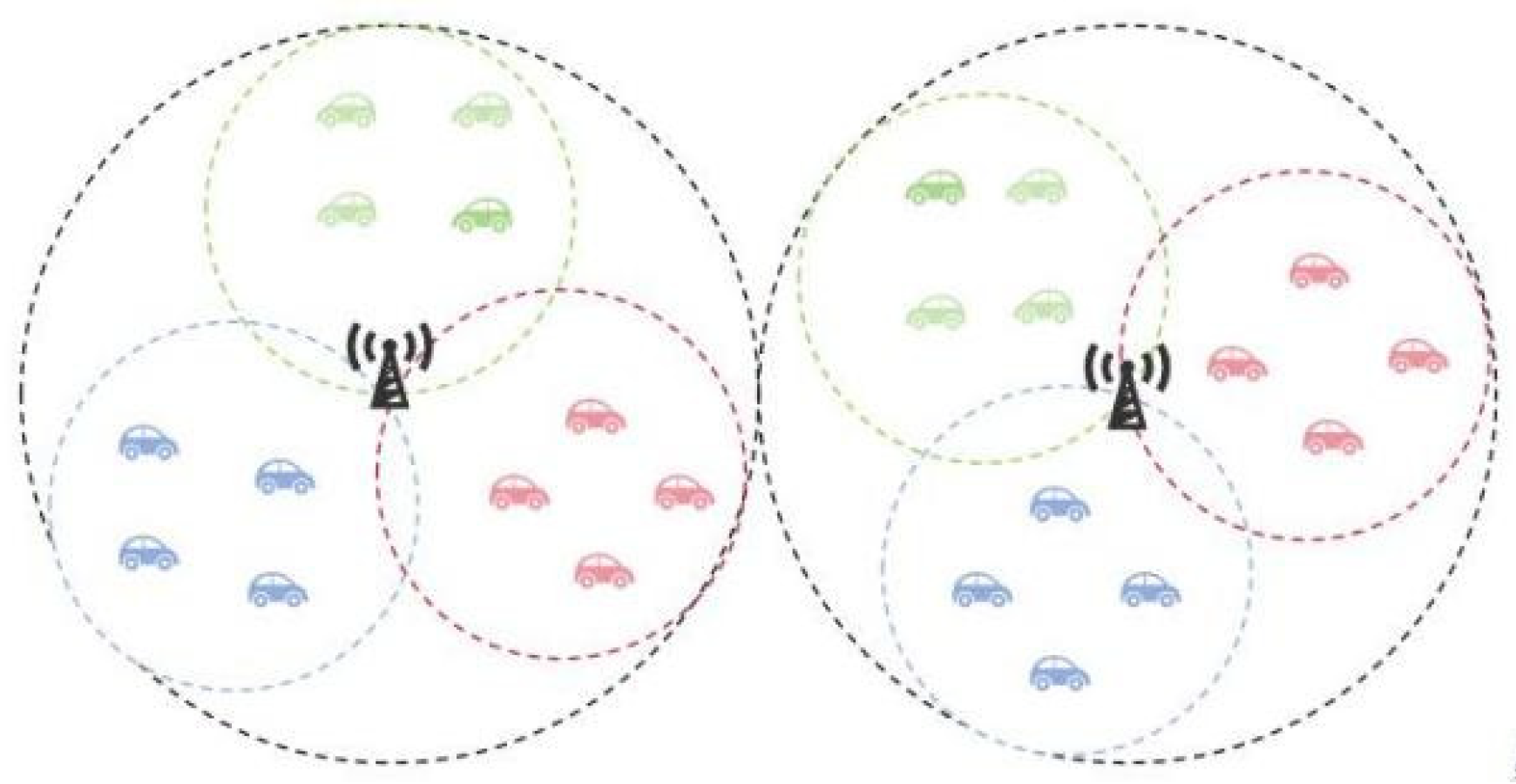
3.1. Architecture
3.2. Implementation Process
4. Consensus Mechanism Based on Integrated State
4.1. Speed Prediction Models
4.2. PoMS Consensus Algorithm
4.3. State-Factors Calculations
4.4. Voting Options
5. Security Analysis
5.1. Message Validation
5.2. Attack Methods
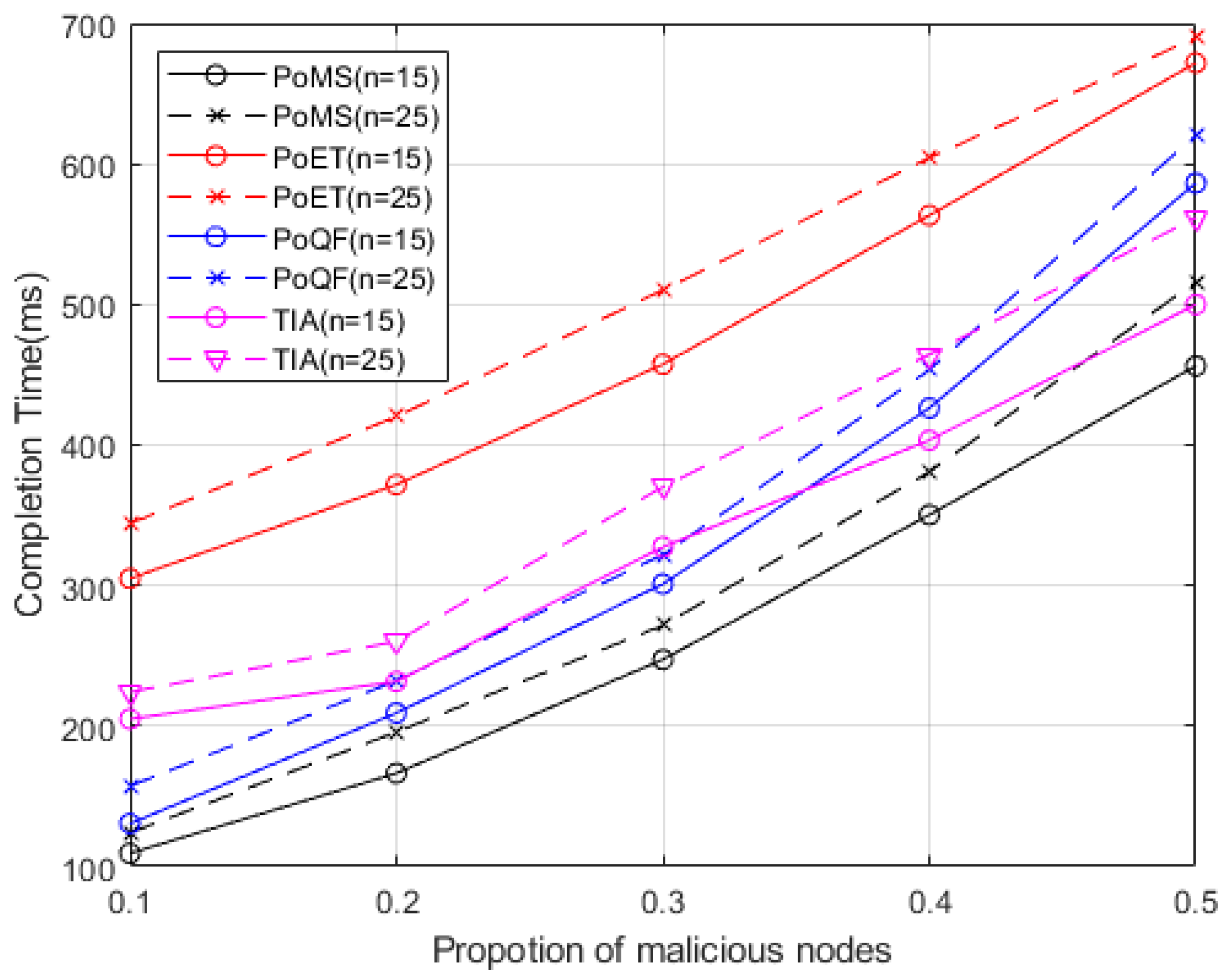
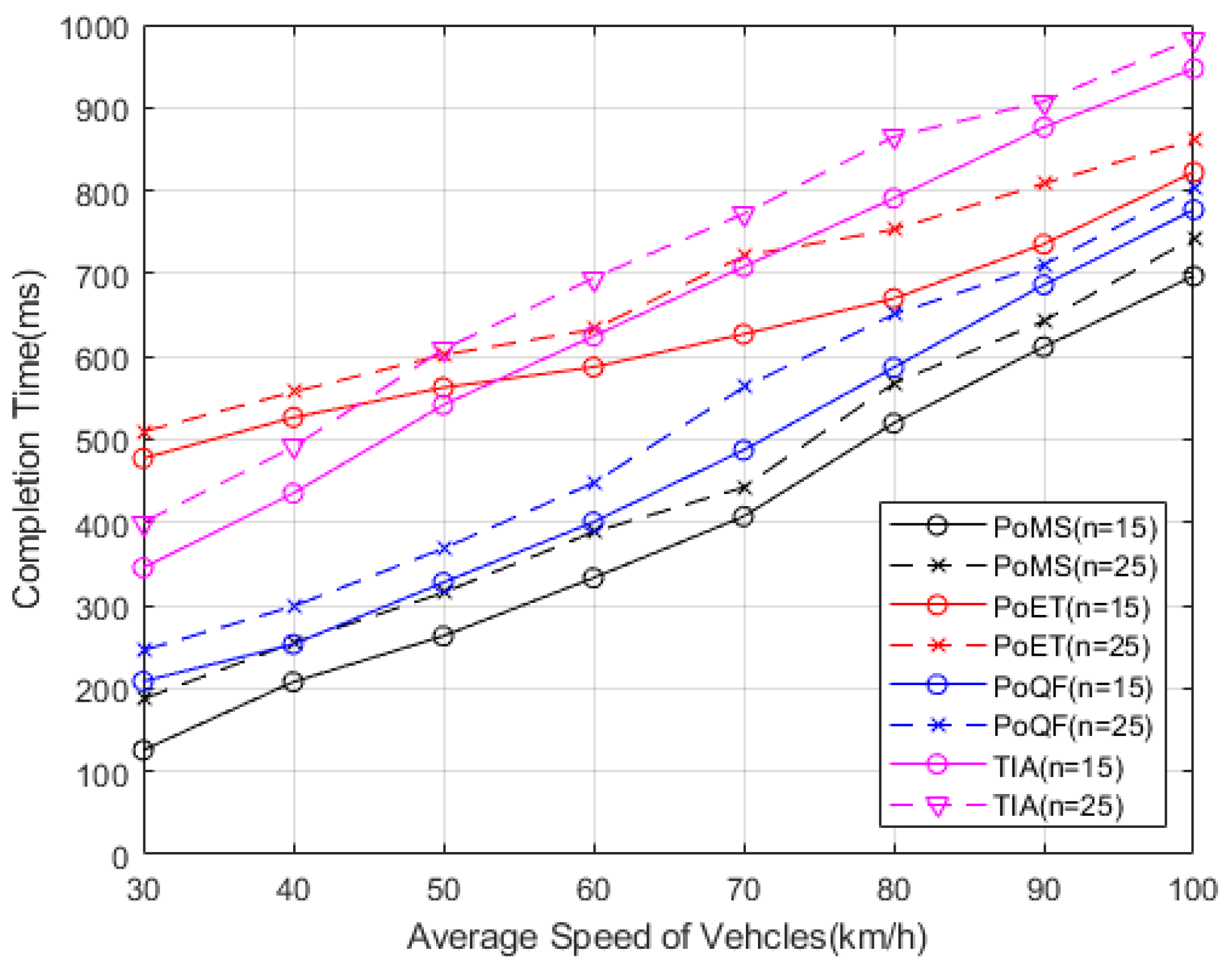
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, Y.; Li, Y.; Chen, S. A survey of Internet of vehicles/vehicles to everything security based on Blockchain. Sci. Sin. Inform. 2023, 53, 841. (In Chinese) [Google Scholar] [CrossRef]
- Islam, M.R.; Rashid, M.M. A Survey on Blockchain Security and Its Impact Analysis. In Proceedings of the 2023 9th International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia, 15–16 August 2023; pp. 317–321. [Google Scholar]
- Zhang, C.; Zhao, M.; Zhu, L.; Zhang, W.; Wu, T.; Ni, J. FRUIT: A Blockchain-Based Efficient and Privacy-Preserving Quality-Aware Incentive Scheme. IEEE J. Sel. Areas Commun. 2022, 40, 3343–3357. [Google Scholar] [CrossRef]
- Wen, X.; Guan, Z.; Li, D.; Lyu, H.; Li, H. A Blockchain-Based Framework for Information Management in Internet of Vehicles. In Proceedings of the 2021 8th IEEE International Conference on Cyber Security and Cloud Computing (CSCloud)/2021 7th IEEE International Conference on Edge Computing and Scalable Cloud (EdgeCom), Washington, DC, USA, 26–28 June 2021; pp. 18–23. [Google Scholar]
- Badertscher, C.; Gaži, P.; Kiayias, A.; Russell, A.; Zikas, V. Ouroboros Genesis: Composable Proof-of-Stake Blockchains with Dynamic Availability. In Proceedings of the 2018 ACM SIGSAC Conference on Computer and Communications Security, Toronto, ON, Canada, 15–19 October 2018; pp. 913–930. [Google Scholar]
- Tong, W.; Dong, X.; Zheng, J. Trust-PBFT: A PeerTrust-Based Practical Byzantine Consensus Algorithm. In Proceedings of the 2019 International Conference on Networking and Network Applications (NaNA), Daegu, Republic of Korea, 10–13 October 2019; pp. 344–349. [Google Scholar]
- Ur Rehman, M.H.; Salah, K.; Damiani, E.; Svetinovic, D. Towards Blockchain-Based Reputation-Aware Federated Learning. In Proceedings of the IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Virtual, 6–9 July 2020; pp. 183–188. [Google Scholar]
- Xu, M.; Zou, Z.; Cheng, Y.; Hu, Q.; Yu, D.; Cheng, X. SPDL: A Blockchain-Enabled Secure and Privacy-Preserving Decentralized Learning System. IEEE Trans. Comput. 2023, 72, 548–558. [Google Scholar] [CrossRef]
- Li, W.; Zhao, Z.; Ma, P.; Xie, Z.; Palade, V.; Liu, H. Graphical Consensus-Based Sharding for Efficient and Secure Sharings in Blockchain-Enabled Internet of Vehicles. IEEE Trans. Veh. Technol. 2024, 73, 1991–2002. [Google Scholar] [CrossRef]
- Du, J.; Cheng, W.; Lu, G.; Cao, H.; Chu, X.; Zhang, Z.; Wang, J. Resource Pricing and Allocation in MEC Enabled Blockchain Systems: An A3C Deep Reinforcement Learning Approach. IEEE Trans. Netw. Sci. Eng. 2022, 9, 33–44. [Google Scholar] [CrossRef]
- Liu, L.; Feng, J.; Mu, X.; Pei, Q.; Lan, D.; Xiao, M. Asynchronous Deep Reinforcement Learning for Collaborative Task Computing and On-Demand Resource Allocation in Vehicular Edge Computing. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15513–15526. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Y.; Qin, X.; Xu, X.; Zhang, P. Adaptive Resource Allocation for Blockchain-Based Federated Learning in Internet of Things. IEEE Internet Things J. 2023, 10, 10621–10635. [Google Scholar] [CrossRef]
- Ul Abadin, Z.; Syed, Z. A Pattern for Proof of Work Consensus Algorithm in Blockchain. In Proceedings of the 26th European Conference on Pattern Languages of Programs, Graz, Austria, 7–11 July 2021; pp. 1–6. [Google Scholar]
- Xu, H.; Yu, L.; Liu, Z.; Liu, Z.; Gu, D. Dynamic Practical Byzantine Fault Tolerance. In Proceedings of the IEEE Conference on Communications and Network Security (CNS), Beijing, China, 30 May–1 June 2018; pp. 1–8. [Google Scholar]
- Bachani, V.; Bhattacharjya, A. Preferential Delegated Proof of Stake (PDPoS)—Modified DPoS with Two Layers towards Scalability and Higher TPS. Symmetry 2022, 15, 4. [Google Scholar] [CrossRef]
- Fitzi, M.; Wang, X.; Kannan, S.; Kiayias, A.; Leonardos, N.; Viswanath, P.; Wang, G. Minotaur: Multi-Resource Blockchain Consensus. In Proceedings of the 2022 ACM SIGSAC Conference on Computer and Communications Security, Los Angeles, CA, USA, 7–11 November 2022; pp. 1095–1108. [Google Scholar]
- Biswas, S.; Sharif, K.; Li, F.; Maharjan, S.; Mohanty, S.; Wang, Y. PoBT: A Lightweight Consensus Algorithm for Scalable IoT Business Blockchain. IEEE Internet Things J. 2020, 7, 2343–2355. [Google Scholar] [CrossRef]
- Han, X.; Yuan, Y.; Wang, F.Y. A Fair Blockchain Based on Proof of Credit. IEEE Trans. Comput. Soc. Syst. 2019, 6, 922–931. [Google Scholar] [CrossRef]
- Yu, J.; Shen, T.; Bai, F.; Yu, Z.; Luo, J. A Blockchain Communication Resource Optimisation Consensus Method. In Proceedings of the 2022 4th Blockchain and Internet of Things Conference, Tokyo, Japan, 8–10 July 2022; pp. 107–114. [Google Scholar]
- Chen, C.; Liu, M.; Mo, P.; Yuan, C.; Dai, P. LBLCO: A Lightweight Blockchain with Low Communication Overhead for Internet of Things. In Proceedings of the 2022 4th Blockchain and Internet of Things Conference, Tokyo, Japan, 8–10 July 2022; pp. 92–99. [Google Scholar]
- 21. Du, G; Cao, Y.; Li, J.; Yan, Z.; Chen, X.; Li, Y.; Chen, J. A Blockchain-Based Trust-Value Management Approach for Secure Information Sharing in Internet of Vehicles. IEEE Internet Things J. 2024, 11, 333–344. [CrossRef]
- Zhang, C.; Luo, X.; Liang, J.; Liu, X.; Zhu, L.; Guo, S. POTA: Privacy-Preserving Online Multi-Task Assignment with Path Planning. IEEE Trans. Mob. Comput. 2024, 23, 5999–6011. [Google Scholar] [CrossRef]
- Cao, M.; Li, V.O.K.; Chan, V.W.S. A CNN-LSTM Model for Traffic Speed Prediction. In Proceedings of the IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–5. [Google Scholar]
- Zhang, C.; Zhao, M.; Liang, J.; Fan, Q.; Zhu, L.; Guo, S. NANO: Cryptographic Enforcement of Readability and Editability Governance in Blockchain Databases. IEEE Trans. Dependable Secur. Comput. 2023. early access. [Google Scholar] [CrossRef]
- Chao, D.; Xu, D.; Gao, F.; Zhang, C.; Zhang, W.; Zhu, L. A Systematic Survey On Security in Anonymity Networks: Vulnerabilities, Attacks, Defenses, and Formalization. IEEE Commun. Surv. Tutor. 2021. early access. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, B.; Zhang, C.; Xiong, Z.; Li, C.; Zhu, L. Towards Efficient and Robust Federated Unlearning in IoT Networks. IEEE Internet Things J. 2024, accepted. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, Y.; Tia, D.; Li, G. Research on consensus optimization of trusted incentive algorithm for blockchain mobile nodes. Sichuan Univ. Nat. Sci. Ed. 2022, 59, 062004. [Google Scholar]
- Bai, F.; Sadagopan, N.; Helmy, A. IMPORTANT: A framework to systematically analyze the impact of mobility on performance of routing protocols for ad hoc networks. In Proceedings of the IEEE INFOCOM—Twenty-Second Annual Joint Conference of the IEEE Computer and Communications Societies, San Francisco, CA, USA, 30 March–3 April 2023; pp. 825–835. [Google Scholar]
- Salimitari, M.; Joneidi, M.; Fallah, Y. BATS: A Blockchain-based Authentication and Trust Management System in Vehicular Networks. In Proceedings of the IEEE International Conference on Blockchain (Blockchain), Melbourne, Australia, 6–8 December 2021; pp. 333–340. [Google Scholar]
- Ayaz, F.; Sheng, Z.; Tian, D.; Guan, Y. A Proof-of-Quality-Factor (PoQF)-Based Blockchain and Edge Computing for Vehicular Message Dissemination. IEEE Internet Things J. 2021, 8, 2468–2482. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, C.; Wu, T.; Zhu, L.; Liu, X. Achieving Efficient and Privacy-Preserving Neural Network Training and Prediction in Cloud Environments. IEEE Trans. Dependable Secur. Comput. 2023, 20, 4245–4257. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, F.; Cheng, R.; Li, C.; Su, Z.; Liang, G.; Yang, C. A Proof-of-Multiple-State Consensus Mechanism for Mobile Nodes in Internet of Vehicles. Electronics 2024, 13, 1553. https://doi.org/10.3390/electronics13081553
Zhao F, Cheng R, Li C, Su Z, Liang G, Yang C. A Proof-of-Multiple-State Consensus Mechanism for Mobile Nodes in Internet of Vehicles. Electronics. 2024; 13(8):1553. https://doi.org/10.3390/electronics13081553
Chicago/Turabian StyleZhao, Feng, Ruimin Cheng, Chunhai Li, Zhaoyu Su, Guoling Liang, and Changsong Yang. 2024. "A Proof-of-Multiple-State Consensus Mechanism for Mobile Nodes in Internet of Vehicles" Electronics 13, no. 8: 1553. https://doi.org/10.3390/electronics13081553
APA StyleZhao, F., Cheng, R., Li, C., Su, Z., Liang, G., & Yang, C. (2024). A Proof-of-Multiple-State Consensus Mechanism for Mobile Nodes in Internet of Vehicles. Electronics, 13(8), 1553. https://doi.org/10.3390/electronics13081553