
Trajectory Tracking Control of Car-like Mobile Robots Based on Extended State Observer and Backstepping Control

Abstract
:1. Introduction
- Modeling errors and external disturbances are introduced into an ideal kinematic model of a CLMR, and the disturbance kinematic model is divided into two mutually independent subsystems using a set of output equations.
- Estimations of the modeling errors and external disturbances of a CLMR based on the linear ESO and the convergence of the observer are guaranteed by the Lyapunov method.
- A backstepping controller is designed based on the estimated values to achieve better disturbance rejection performance of the CLMR. The effectiveness of the designed controller is verified by a simulation and experimentally.
- Tracking accuracy: for application scenarios that do not require high accuracy, the kinematic model can be chosen; for scenarios that require higher control accuracy, the dynamic model is more appropriate.
- Traveling speed: the kinematic model is suitable for low-speed scenarios (speed less than 5 m/s), while the dynamic model is more suitable for high-speed scenarios [16].
- Computing power: the kinematic model is relatively simple and suitable for systems with limited computational power. The dynamic model is more complex and suitable for computationally powerful systems.
- Sensor limitations: the kinematic model usually requires only position and velocity sensors, while dynamic models also require acceleration sensors.
2. Problem Formulation
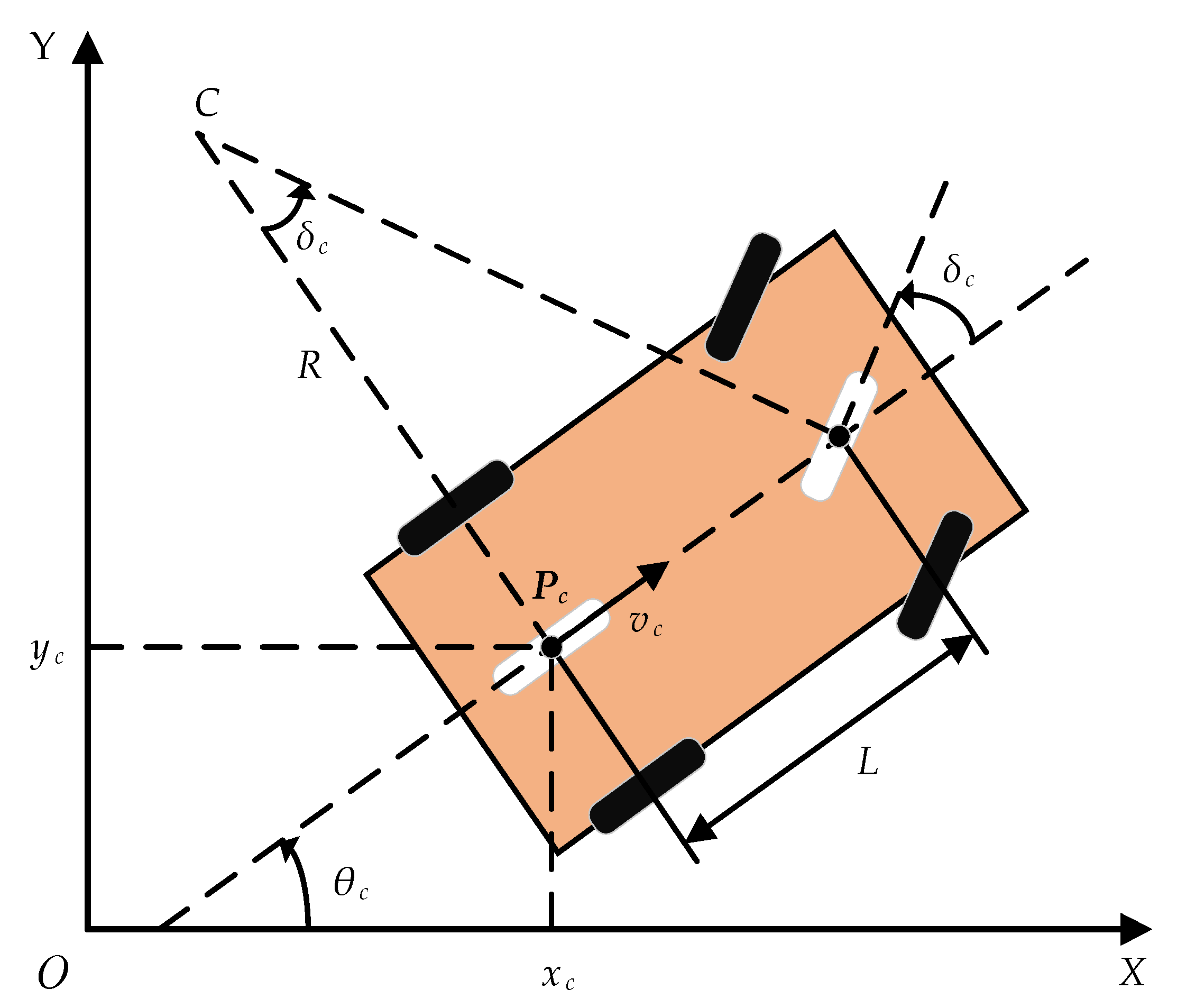
2.1. Kinematic Model with Disturbances
2.2. Output Transform
3. Trajectory Tracking Control Strategy
3.1. Extended State Observer
3.2. Backstepping Controller
4. Simulation and Experiment Results
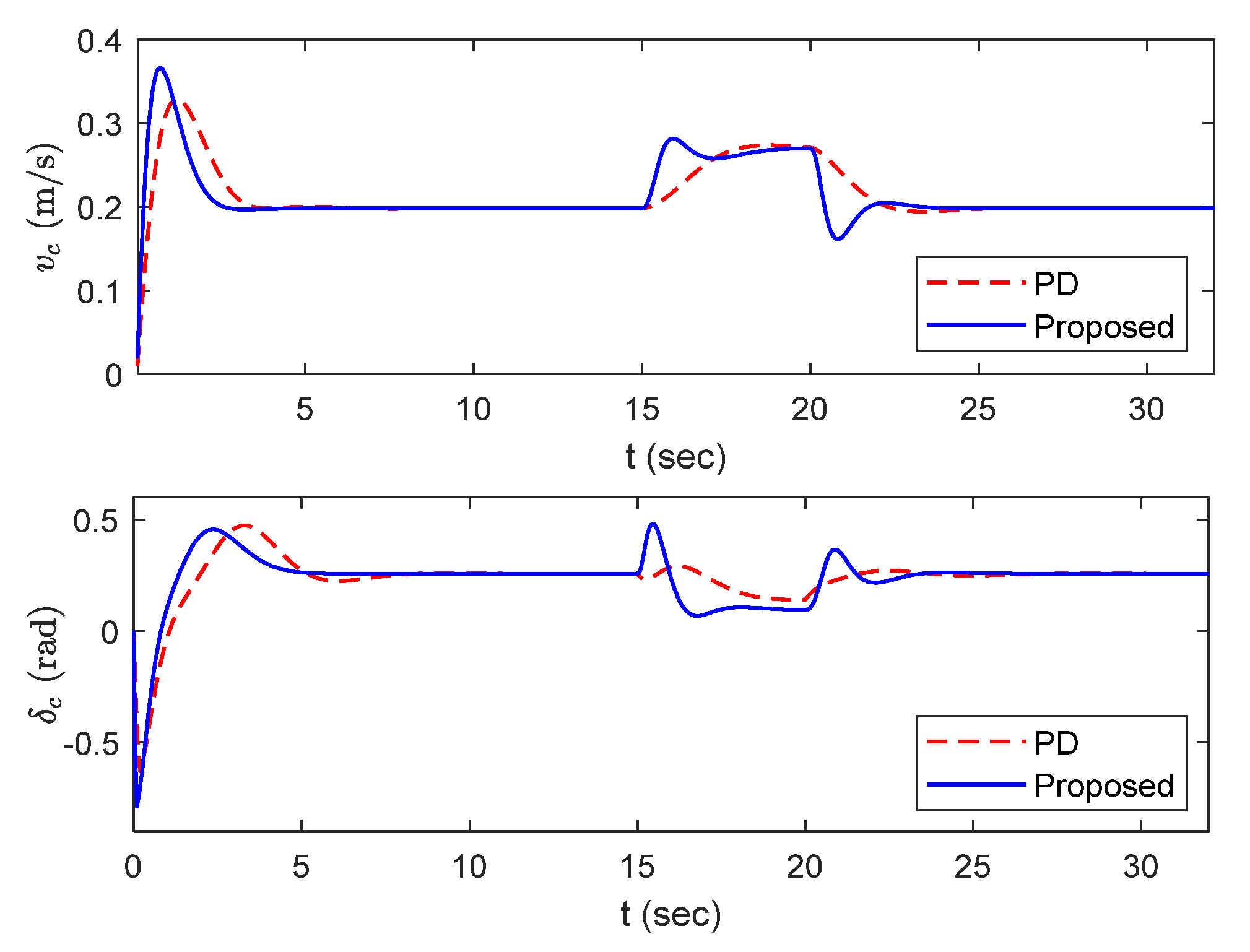
4.1. Simulation
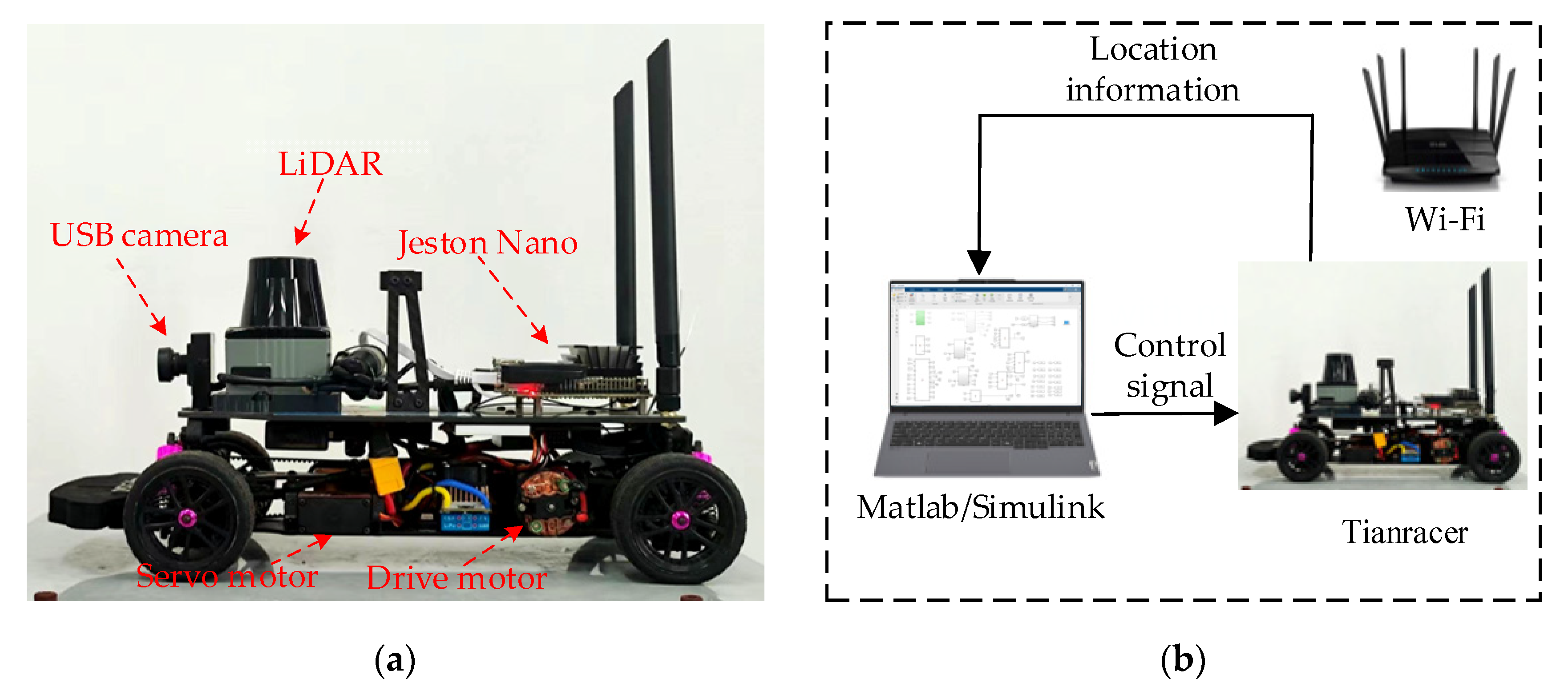
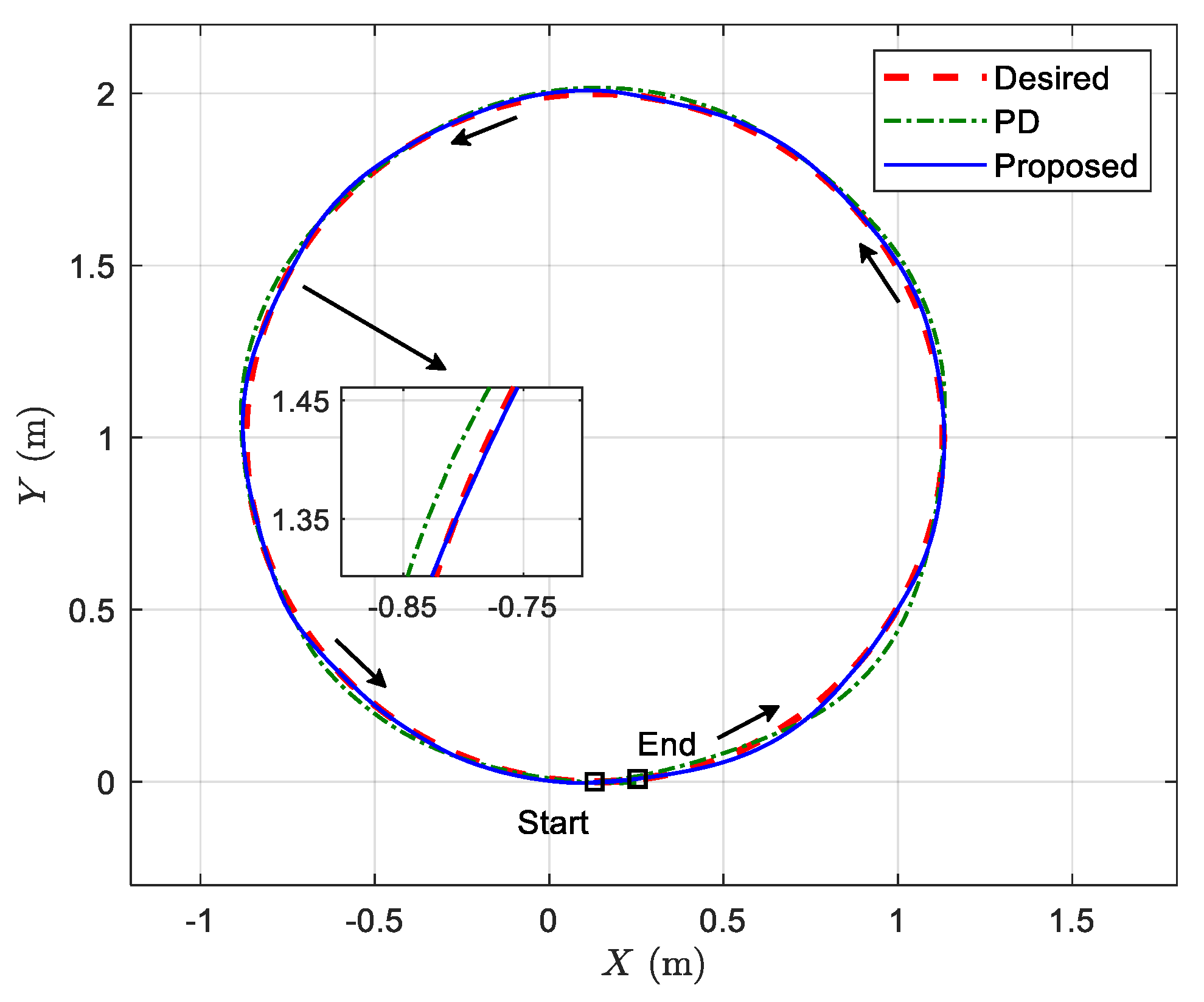
4.2. Real-World Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rea, P.; Ottaviano, E. Design and development of an inspection robotic system for indoor applications. Robot. Comput.-Integr. Manuf. 2018, 49, 143–151. [Google Scholar] [CrossRef]
- Choi, B.; Lee, W.; Park, G.; Lee, Y.; Min, J.; Hong, S. Development and control of a military rescue robot for casualty extraction task. J. Field Robot. 2019, 36, 656–676. [Google Scholar] [CrossRef]
- Harik, E.H.; Guinand, F.; Geipel, J. A semi-autonomous multi-vehicle architecture for agricultural applications. Electronics 2023, 12, 3552. [Google Scholar] [CrossRef]
- Sousa, R.B.; Petry, M.R.; Costa, P.G.; Moreira, A.P. OptiOdom: A generic approach for odometry calibration of wheeled mobile robots. J. Intell. Robot. Syst. 2022, 105, 39. [Google Scholar] [CrossRef]
- Wen, L.C.; Liu, Y.; Li, H.L. CL-MAPF: Multi-agent path finding for car-like robots with kinematic and spatiotemporal constraints. Robot. Auton. Syst. 2022, 150, 103997. [Google Scholar] [CrossRef]
- Qin, Z.B.; Chen, L.; Hu, M.J.; Chen, X. A lateral and longitudinal dynamics control framework of autonomous vehicles based on multi-parameter joint estimation. IEEE Trans. Veh. Technol. 2022, 71, 5837–5852. [Google Scholar] [CrossRef]
- Wang, H.; Zuo, Z.; Wang, Y.; Yang, H.; Hu, C. Estimator-based turning control for unmanned ground vehicles: An anti-peak extended state observer approach. IEEE Trans. Veh. Technol. 2022, 71, 12489–12498. [Google Scholar] [CrossRef]
- Yan, K.; Ma, B. Global posture stabilization for the kinematic model of a rear-axle driven car-like mobile robot considering obstacle avoidance. IEEE Robot. Autom. Lett. 2023, 8, 5568–5575. [Google Scholar] [CrossRef]
- Yeh, Y.C.; Li, T.H.S.; Chen, C.Y. Adaptive fuzzy sliding-mode control of dynamic model based car-like mobile robot. Int. J. Fuzzy Syst. 2009, 11, 272–286. [Google Scholar]
- Li, P.; Yang, H.; Li, H.; Liang, S. Nonlinear ESO-based tracking control for warehouse mobile robots with detachable loads. Robot. Auton. Syst. 2022, 149, 103965. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, R.; Fang, Y.; Li, B.; Ma, B. Acceleration-level pseudo-dynamic visual servoing of mobile robots with backstepping and dynamic surface control. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2071–2081. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 48–58. [Google Scholar] [CrossRef]
- Ge, L.; Zhao, Y.; Ma, F.; Guo, K. Towards longitudinal and lateral coupling control of autonomous vehicles using offset free MPC. Control Eng. Pract. 2022, 121, 105074. [Google Scholar] [CrossRef]
- Wang, X.; Sun, W. Trajectory tracking of autonomous vehicle: A differential flatness approach with disturbance-observer-based control. IEEE Trans. Intell. Veh. 2023, 8, 1368–1379. [Google Scholar] [CrossRef]
- Kong, J.; Pfeiffer, M.; Schildbach, G.; Borrelli, F. Kinematic and dynamic vehicle models for autonomous driving control design. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 1094–1099. [Google Scholar]
- Kebbati, Y.; Ait-Oufroukh, N.; Ichalal, D.; Vigneron, V. Lateral control for autonomous wheeled vehicles: A technical review. Asian J. Control 2023, 25, 2539–2563. [Google Scholar] [CrossRef]
- Rokonuzzaman, M.; Mohajer, N.; Nahavandi, S.; Mohamed, S. Review and performance evaluation of path tracking controllers of autonomous vehicles. IET Intell. Transp. Syst. 2021, 15, 646–670. [Google Scholar] [CrossRef]
- Hamerlain, F.; Floquet, T.; Perruquetti, W. Experimental tests of a sliding mode controller for trajectory tracking of a car-like mobile robot. Robotica 2014, 32, 63–76. [Google Scholar] [CrossRef]
- Pang, H.; Liu, N.; Hu, C.; Xu, Z. A practical trajectory tracking control of autonomous vehicles using linear time-varying MPC method. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2021, 236, 709–723. [Google Scholar] [CrossRef]
- Dighe, Y.; Kim, Y.; Rajguru, S.; Turkar, Y.; Singh, T.; Dantu, K. Kinematics-only differential flatness based trajectory tracking for autonomous racing. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 1629–1636. [Google Scholar]
- Yagiz, N.; Hacioglu, Y. Backstepping control of a vehicle with active suspensions. Control Eng. Pract. 2008, 16, 1457–1467. [Google Scholar] [CrossRef]
- Qi, G.; Deng, J.; Li, X.; Yu, X. Compensation function observer-based model-compensation backstepping control and application in anti-inference of quadrotor UAV. Control Eng. Pract. 2023, 140, 105633. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, Y.; Rakheja, S. Adaptive trajectory tracking for car-like vehicles with input constraints. IEEE Trans. Ind. Electron. 2022, 69, 2801–2810. [Google Scholar] [CrossRef]
- Rodríguez-Arellano, J.A.; Miranda-Colorado, R.; Aguilar, L.T.; Negrete-Villanueva, M.A. Trajectory tracking nonlinear H∞ controller for wheeled mobile robots with disturbances observer. ISA Trans. 2023, 142, 372–385. [Google Scholar] [CrossRef] [PubMed]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference(ACC), Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]
- Wang, H.; Zuo, Z.; Wang, Y.; Yang, H.; Chang, S. Composite nonlinear extended state observer and its application to unmanned ground vehicles. Control Eng. Pract. 2021, 109, 104731. [Google Scholar] [CrossRef]
- Chang, S.; Wang, Y.; Zuo, Z.; Zhang, Z.; Yang, H. On fast finite-time extended state observer and its application to wheeled mobile robots. Nonlinear Dyn. 2022, 110, 1473–1485. [Google Scholar] [CrossRef]
- Lu, Q.; Chen, J.; Wang, Q.; Zhang, D.; Sun, M.; Su, C.-Y. Practical fixed-time trajectory tracking control of constrained wheeled mobile robots with kinematic disturbances. ISA Trans. 2022, 129, 273–286. [Google Scholar] [CrossRef]
- Tiriolo, C.; Lucia, W. On the design of control invariant regions for feedback linearized car-like vehicles. IEEE Control Syst. Lett. 2023, 7, 739–744. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Schemes | Controller Parameters | Observer Parameters |
|---|---|---|
| PD | no | |
| Proposed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Li, B.; Zhao, C.; Wang, Y. Trajectory Tracking Control of Car-like Mobile Robots Based on Extended State Observer and Backstepping Control. Electronics 2024, 13, 1563. https://doi.org/10.3390/electronics13081563
Zhu C, Li B, Zhao C, Wang Y. Trajectory Tracking Control of Car-like Mobile Robots Based on Extended State Observer and Backstepping Control. Electronics. 2024; 13(8):1563. https://doi.org/10.3390/electronics13081563
Chicago/Turabian StyleZhu, Changfu, Baoquan Li, Chenyang Zhao, and Yixin Wang. 2024. "Trajectory Tracking Control of Car-like Mobile Robots Based on Extended State Observer and Backstepping Control" Electronics 13, no. 8: 1563. https://doi.org/10.3390/electronics13081563
APA StyleZhu, C., Li, B., Zhao, C., & Wang, Y. (2024). Trajectory Tracking Control of Car-like Mobile Robots Based on Extended State Observer and Backstepping Control. Electronics, 13(8), 1563. https://doi.org/10.3390/electronics13081563