

Design of Fractional-Order Non-Singular Terminal Sliding Mode Observer Sensorless System for Surface-Mounted Permanent Magnet Synchronous Motor

Abstract
:1. Introduction
- (1)
- In this message, the fractional-order control is combined with the non-singular terminal sliding mode observer (NTSMO) to design fractional-order non-singular terminal sliding mode (FONTSMO). Furthermore, a new approach rate is designed to better fit the designed sliding mode surface to reduce the buffeting of the system, and it is proved by the mathematical analysis that the system can converge in finite time;
- (2)
- In order to eliminate the ripple in the back electromotive force and avoid the use of low-pass filters, this paper uses an improved adaptive back-EMF structure filter and performs the Lyapunov analysis on it;
- (3)
- Combining the fractional-order integral factor with the phase-locked loop, fractional-order phase-locked loop (FOPLL) is designed to replace the arc-tangent function.
2. Mathematical Model of PMSM
2.1. Mathematical Model of Electric Machine
2.2. Sliding Mode Observer
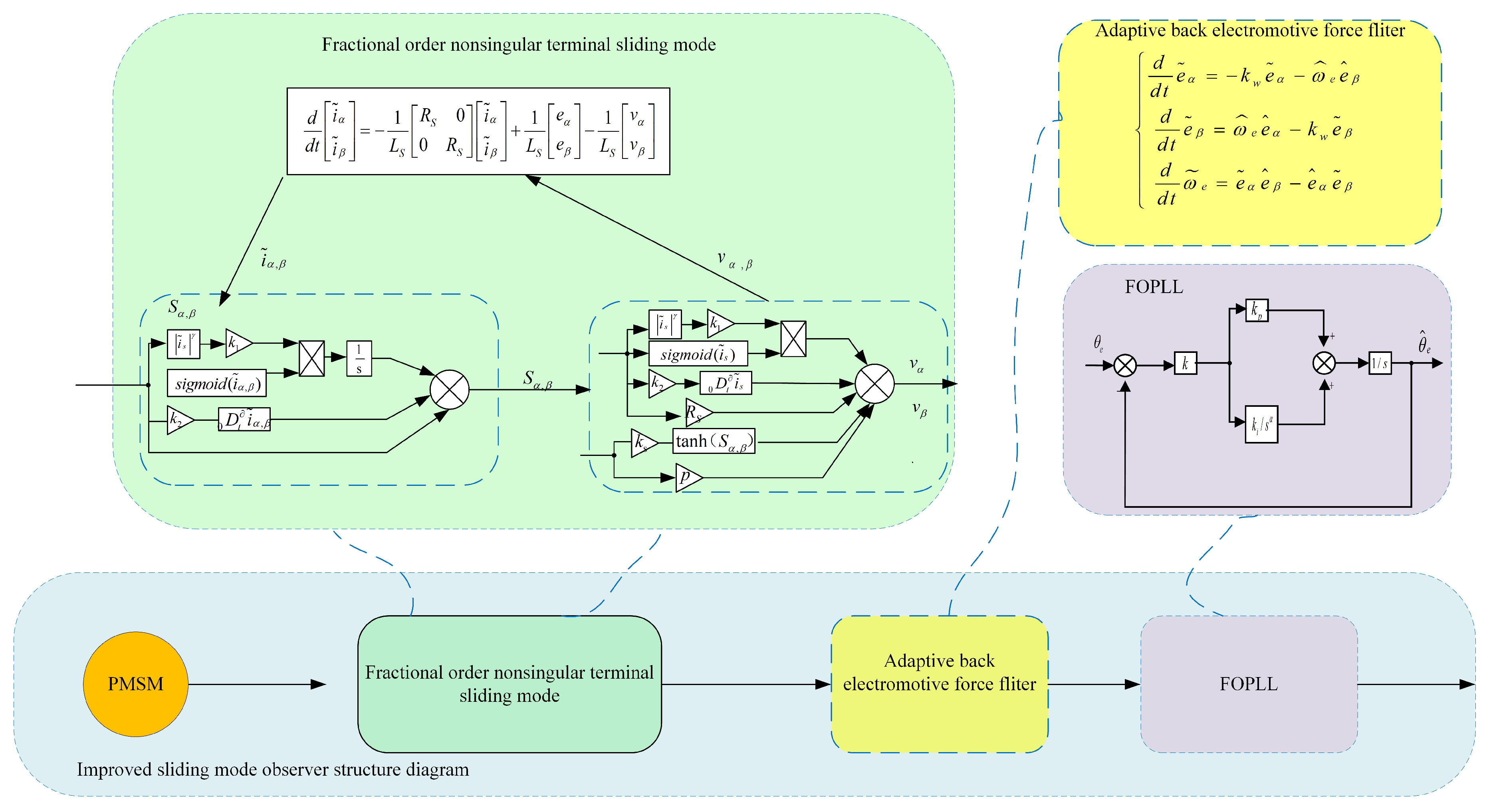
3. Improve the Design of the Sliding Mode Observer
3.1. Construction of Fractional-Order Terminal Non-Singular Sliding Mode Observer
3.2. Stability Analysis of FONTSMO System
3.3. Adaptive Back Electromotive Force Filter
3.4. Design of FOPLL Motor Rotor Position Estimation Module
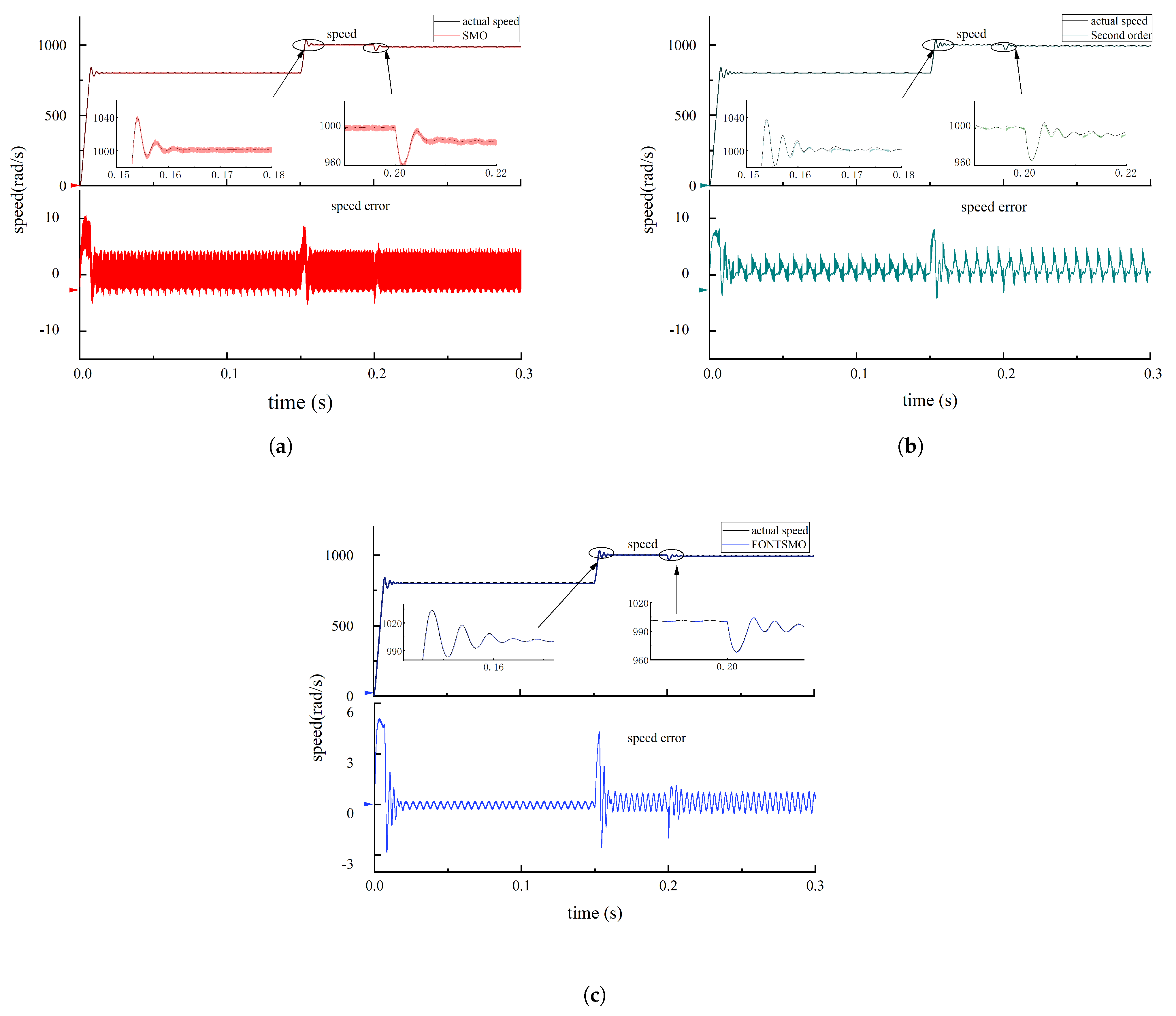
4. Simulation Analysis and Experimental Verification
4.1. Simulation Analysis
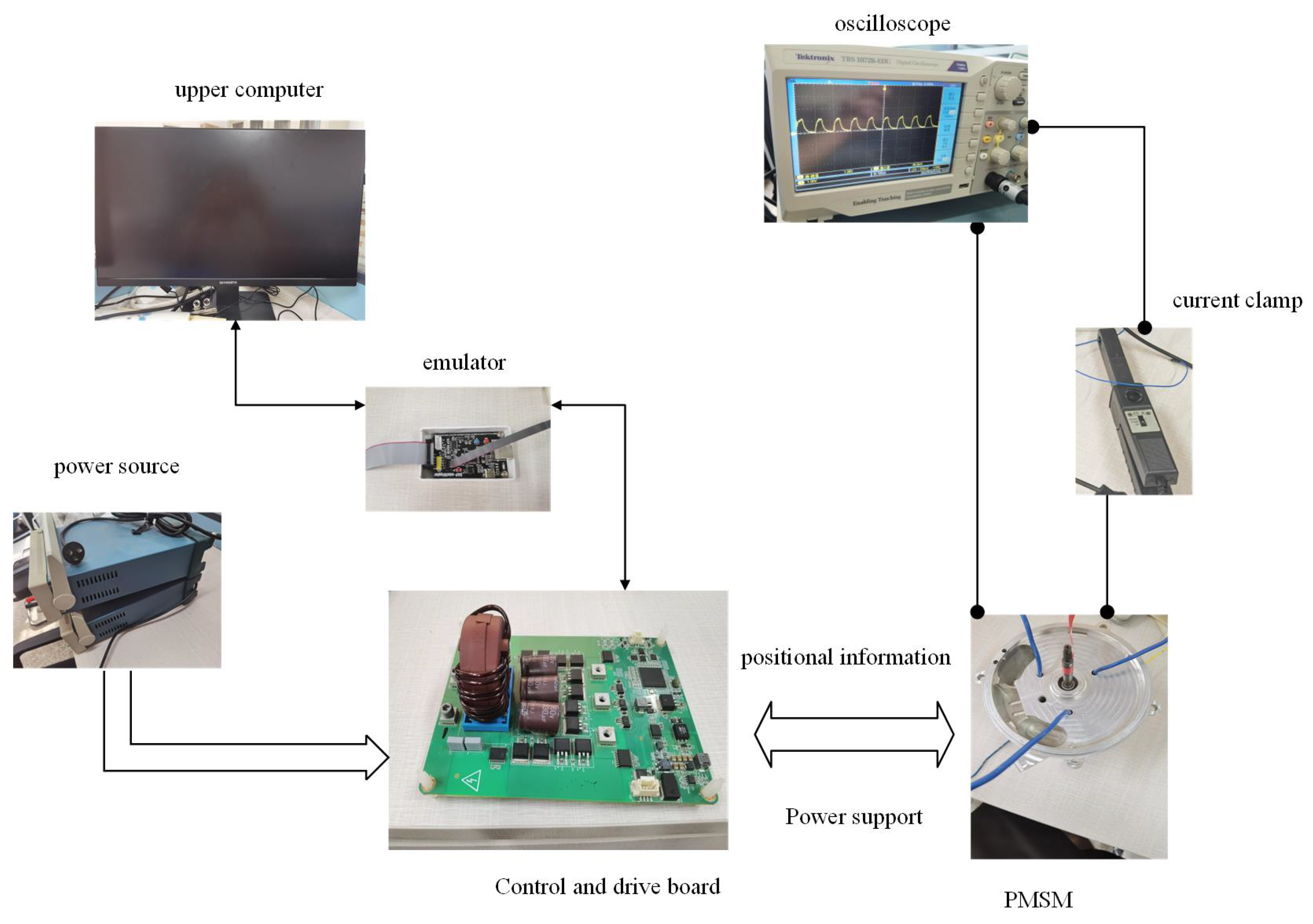
4.2. Experimental Verification
- (1)
- Operative part: SPMSM. The motor is connected to the control board, and the sensor on the motor can transmit the position information of the motor during operation back to the control and drive board for the upper computer to read;
- (2)
- Power supply: DC power supply. This part separately supplies power to the motor and the control board;
- (3)
- Main control part: upper computer, DAPminiWiggler, control, and drive-integrated control board equipped with an Infineon TC277 chip. The TC277 chip has a maximum clock of 200 MHz and a three-core architecture, which is suitable for a variety of system conditions. The experiment mainly used the C language to write motor control code on a Tasking platform. The main modules used are ADC (analog-to-digital Converter) and GTM (generic timer module). The ADC mainly samples the motor, and the GTM can generate controlled pulse width modulation (PWM) to drive the motor.
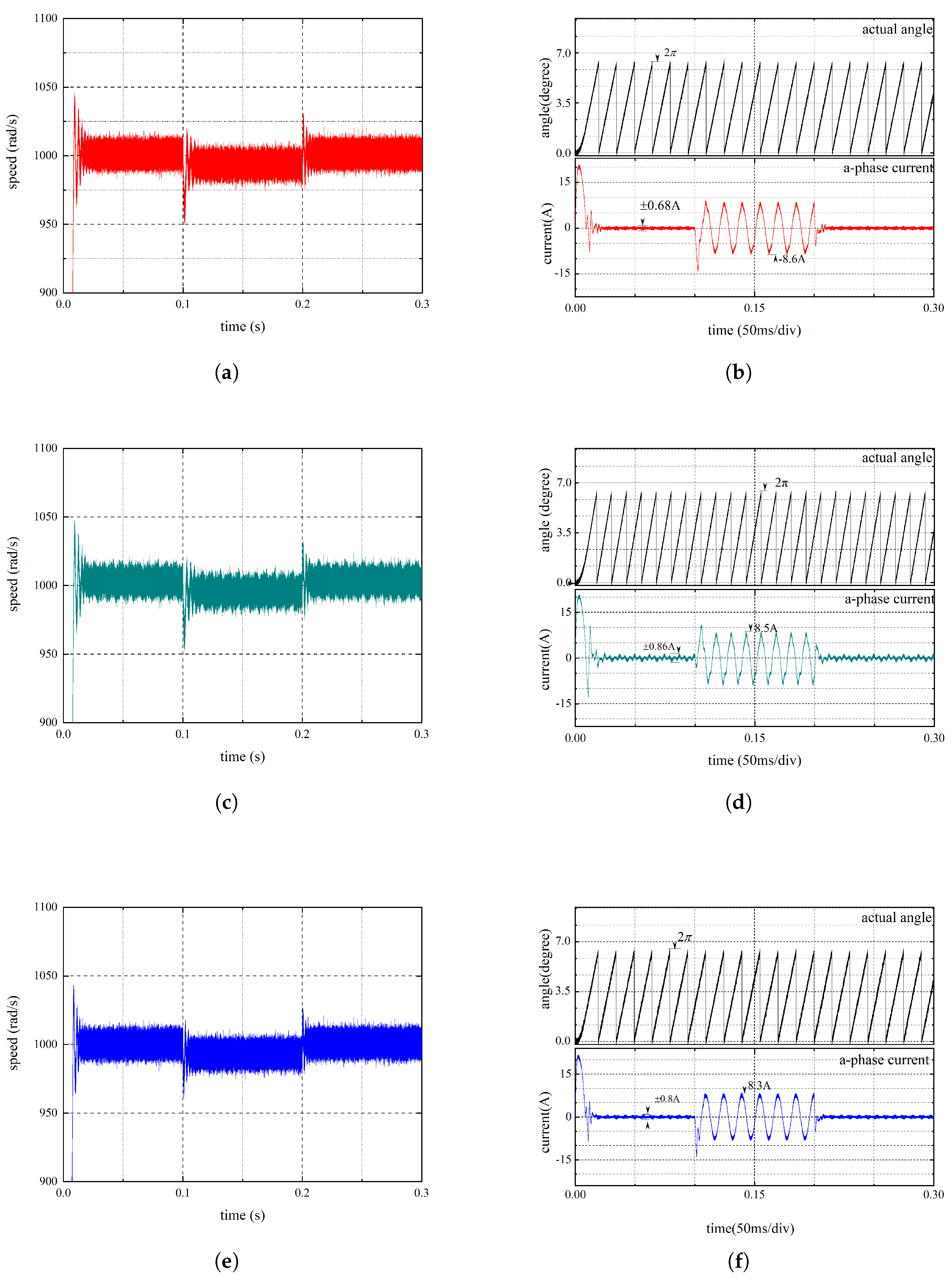
4.3. Result and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Meaning |
| SPMSM | Surface-mounted permanent magnet synchronous motor |
| PMSM | Permanent magnet synchronous motor |
| NTSMO | Non-singular terminal sliding mode observer |
| FONTSMO | Fractional-order non-singular terminal sliding mode |
| FOPLL | Fractional-order Phase-locked loop |
References
- Zhou, Q.; Zhang, Y.; He, H.; Li, W.; Qi, X. Study on Location Detection of PMSM Rotor Based on Sliding Mode Observer. In Proceedings of the 2016 International Symposium on Computer, Consumer and Control (IS3C), Xi’an, China, 4–6 July 2016; pp. 77–80. [Google Scholar] [CrossRef]
- Matraji, I.; Al-Durra, A.; Errouissi, R. Design and experimental validation of enhanced adaptive second-order SMC for PMSG-based wind energy conversion system. Int. J. Electr. Power Energy Syst. 2018, 103, 21–30. [Google Scholar] [CrossRef]
- Chen, S.; Lin, F. Robust nonsingular terminal sliding-mode control for nonlinear magnetic bearing system. IEEE Trans Control Syst Technol. 2011, 19, 2050484. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Shan, L.; Zhang, L.; Zhang, L. Double-hierarchical fuzzy exponential convergence law fractional-order sliding mode control for PMSM drive control in EV. Eng. Sci. Technol. Int. J. 2023, 47, 101536. [Google Scholar] [CrossRef]
- Zhang, Y.; Yin, Z.; Du, C.; Liu, J.; Sun, X. Noise Spectrum Shaping of Random High-Frequency-Voltage Injection Based on Markov Chain for IPMSM Sensorless Control. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3682–3699. [Google Scholar] [CrossRef]
- Bin, X.; Luo, X.; Zhu, L.; Zhao, J. Sensorless Control of Dual Three-Phase PMSM with High Frequency Voltage Signal Injection. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, G.; Zhang, H. A new speed adaptive estimation method based on an improved flux sliding-mode observer for the sensorless control of PMSM drives. ISA Trans. 2022, 128, 675–685. [Google Scholar] [CrossRef] [PubMed]
- Yang, M.; Lang, X.; Long, J.; Xu, D. Flux Immunity Robust Predictive Current Control with Incremental Model and Extended State Observer for PMSM Drive. IEEE Trans. Power Electron. 2017, 32, 9267–9279. [Google Scholar] [CrossRef]
- Zerdali, E.; Barut, M. The Comparisons of Optimized Extended Kalman Filters for Speed-Sensorless Control of Induction Motors. IEEE Trans. Ind. Electron. 2017, 64, 4340–4351. [Google Scholar] [CrossRef]
- Zhao, H.; Luo, P.; Wang, N.; Zheng, Z.; Wang, Y. Fuzzy logic control of the fault-tolerant PMSM servo system based on MRAS observer. In Proceedings of the 2018 Chinese Control Furthermore, Decision Conference (CCDC), Chongqing, China, 12–14 June 2018; pp. 1812–1817. [Google Scholar] [CrossRef]
- Smith, A.N.; Gadoue, S.M.; Finch, J.W. Improved Rotor Flux Estimation at Low Speeds for Torque MRAS-Based Sensorless Induction Motor Drives. IEEE Trans. Energy Convers. 2016, 31, 270–282. [Google Scholar] [CrossRef]
- Huang, Y.; Wu, F. A Sensorless Control Method for Permanent Magnet Synchronous Motor Based on Fractional-Order Sliding Mode Observer. In Proceedings of the 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 12–14 June 2020; pp. 1536–1542. [Google Scholar] [CrossRef]
- Yuan, L.; Xiao, F.; Shen, J.Q.; Chen, M.L. Sensorless control of high-power interior permanent-agnet synchronous motor drives at very low speed. IET Electr. Power Appl. 2013, 7, 199–206. [Google Scholar] [CrossRef]
- Song, X.; Fang, J.; Han, B.; Zheng, S. Adaptive Compensation Method for High-Speed Surface PMSM Sensorless Drives of EMF-Based Position Estimation Error. IEEE Trans. Power Electron. 2016, 31, 1438–1449. [Google Scholar] [CrossRef]
- Qiao, Z.; Shi, T.; Wang, Y.; Yan, Y.; Xia, C.; He, X. New Sliding-Mode Observer for Position Sensorless Control of Permanent-Magnet Synchronous Motor. IEEE Trans. Ind. Electron. 2013, 60, 710–719. [Google Scholar] [CrossRef]
- Tao, P.; Wang, F.; Mei, X.; Lin, J. PLL with Piecewise Judgement Function for SMO Beased Sensorless Control of PMSM. In Proceedings of the 2017 5th International Conference on Enterprise Systems (ES), Beijing, China, 22–24 September 2017. [Google Scholar]
- Pan, Y.; Xu, N. A Super-Spiral Sliding Mode Algorithm for Sensorless Permanent Magnet Synchronous Motor of Electric Vehicle. In Proceedings of the 2023 IEEE 3rd International Conference on Electronic Technology, Communication and Information (ICETCI), Changchun, China, 26–28 May 2023; pp. 440–444. [Google Scholar] [CrossRef]
- Rebah, M.; Trabelsi, M.; Boussak, M.; Faouzi, M. Second-Order SMO-based sensorless control of IM drive: Experimental investigations of observer sensitivity and system reconfiguration in post-fault operation mode. IET Electr. Power Appl. 2020, 15, 811–823. [Google Scholar] [CrossRef]
- Wang, B.; Luo, C.; Yu, Y.; Wang, G.; Xu, D.G. AntiDisturbance Speed Control for Induction Machine Drives Using High-Order Fast Terminal Sliding-Mode Load Torque Observer. IEEE Trans. Power Electron. 2017, 33, 7927–7937. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, L.; Zhao, K.; Sun, L. Nonlinear Speed Control for PMSM System Using Sliding-Mode Control and Disturbance Compensation Techniques. IEEE Trans. Power Electron. 2013, 28, 1358–1365. [Google Scholar] [CrossRef]
- Savitha, P.R.; Divakar, B.P. Performance comparison of Rotor Flux based and Back EMF Based Model Reference Adaptive System Speed Estimator for 3 Phase Induction Motor. In Proceedings of the 2023 IEEE International Conference on Distributed Computing, VLSI, Electrical Circuits and Robotics (DISCOVER), Mangalore, India, 13–14 October 2023; pp. 127–133. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D.; Zhao, N. ADALINE-Network-Based PLL for Position Sensorless Interior Permanent Magnet Synchronous Motor Drives. IEEE Trans. Power Electron. 2016, 31, 1450–1460. [Google Scholar] [CrossRef]
- Tang, S.; Sun, Y.; Chen, Y.; Zhao, Y.; Yang, Y.; Szeto, W. An Enhanced MPPT Method Combining Fractional-Order and Fuzzy Logic Control. IEEE J. Photovolt. 2017, 7, 640–650. [Google Scholar] [CrossRef]
- Boukal, Y.; Darouach, M.; Zasadzinski, M.; Radhy, N.E. Robust H∞ Observer-Based Control of Fractional-Order Systems with Gain Parametrization. IEEE Trans. Autom. Control 2017, 62, 5710–5723. [Google Scholar] [CrossRef]
- Nojavanzadeh, D.; Badamchizadeh, M. Adaptive Fractional-order Non-singular Fast Terminal Sliding Mode Control for Robot Manipulators. IET Control Theory Appl. 2016, 10, 1565–1572. [Google Scholar] [CrossRef]
- Yuan, T.; Zheng, M.; Zhang, K.; Huang, T. Fractional-order PID controllers for stabilization of fractional-order time delay systems based on region stability. In Proceedings of the 2018 Chinese Control Furthermore, Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 6633–6638. [Google Scholar] [CrossRef]
- Kumar, K.V.K.S.S.; Rao, B.V.; Kumar, G.V.E.S. Fractional order PLL based sensorless control of PMSM with sliding mode observer. In Proceedings of the 2018 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 18–20 January 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Zhou, M.; Cheng, S.; Feng, Y.; Xu, W.; Cai, W. Full-Order Terminal Sliding-Mode based Sensorless Control of Induction Motor with Gain Adaptation. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 10, 1978–1991. [Google Scholar] [CrossRef]
- Jumarie, G. Fractional Differential Calculus for Non-Differentiable Functions; LAP LAMBERT Academic Publishing: London, UK, 2013. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Summarize | |
|---|---|---|
| Merit | Drawback | |
| High-frequency injection [5,6] | Low speed domain | Only for convex structure |
| Extended observer [8,9] | High parameter robustness | Large computing load |
| Adaptive model reference [10,11] | Simple in structure | Low parameter robustness |
| Traditional sliding mode [16] | Fast convergence | The system buffeting is large |
| Sigmoid function [15] | Reduced buffeting | The robustness decreases |
| Super-twisting sliding mode [17] | Accurate estimation | Only for first-order systems |
| Second-order sliding mode [18] | Reduced harmonics | Slow convergence rate |
| Terminal sliding mode [19,20] | Rapid convergence | Singularity |
| Phase-locked loop [22] | No phase deviation | Not matching the system |
| Parameter | Value |
|---|---|
| Number of motor poles | 4 |
| Nominal voltage | 380 V |
| Rated power | 4.4 kW |
| Stator resistance | 2.9 |
| Rated current | 12 A |
| Q-axis inductance | 8.5 mH |
| Q-axis inductance | 8.5 mH |
| Rotational inertia | 0.28 kg • m |
| ADC sampling frequency | 20 MHz |
| Inverter frequency | 5 KHz |
| Strategy | Evaluation Parameter | ||
|---|---|---|---|
| Speed Estimation Error (rad/s) | Position Estimation Error (rad) | ||
| Traditional sliding mode | Normal | 4.30 | 0.049 |
| Acceleration rate | 4.50 | 0.050 | |
| Load | 4.60 | 0.050 | |
| Second-order sliding mode | Normal | 3.50 | 0.040 |
| Acceleration rate | 4.00 | 0.041 | |
| Load | 4.10 | 0.042 | |
| FONTSMO | normal | 1.019 | 0.011 |
| Acceleration rate | 1.750 | 0.018 | |
| load | 1.760 | 0.018 | |
| Parameter Comparison | |||||
|---|---|---|---|---|---|
| Traditional Sliding Mode | Second-Order Sliding Mode | FONTSMO | |||
| P | 1 | P | 1 | P | 1 |
| I | 0.2 | I | 0.2 | I | 0.2 |
| l | 100 | 100 | 1 | ||
| 200 | 0.05 | ||||
| r | 1.1 | ||||
| 𝜕 | 1.3 | ||||
| 214 | |||||
| 2 | |||||
| −5.795 | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, G.; Gao, J.; Lei, J.; Han, S.; Xiao, Y. Design of Fractional-Order Non-Singular Terminal Sliding Mode Observer Sensorless System for Surface-Mounted Permanent Magnet Synchronous Motor. Electronics 2024, 13, 1601. https://doi.org/10.3390/electronics13081601
Yao G, Gao J, Lei J, Han S, Xiao Y. Design of Fractional-Order Non-Singular Terminal Sliding Mode Observer Sensorless System for Surface-Mounted Permanent Magnet Synchronous Motor. Electronics. 2024; 13(8):1601. https://doi.org/10.3390/electronics13081601
Chicago/Turabian StyleYao, Guozhong, Jinlong Gao, Jilin Lei, Shaojun Han, and Yuhan Xiao. 2024. "Design of Fractional-Order Non-Singular Terminal Sliding Mode Observer Sensorless System for Surface-Mounted Permanent Magnet Synchronous Motor" Electronics 13, no. 8: 1601. https://doi.org/10.3390/electronics13081601
APA StyleYao, G., Gao, J., Lei, J., Han, S., & Xiao, Y. (2024). Design of Fractional-Order Non-Singular Terminal Sliding Mode Observer Sensorless System for Surface-Mounted Permanent Magnet Synchronous Motor. Electronics, 13(8), 1601. https://doi.org/10.3390/electronics13081601