

Offline Fault Diagnosis for 2-Level Inverter: Short-Circuit and Open-Circuit Detection


Abstract
:1. Introduction
2. Conventional Inverter Fault-Diagnosis Method
3. Proposed Fault-Diagnosis Method
3.1. Short Circuit
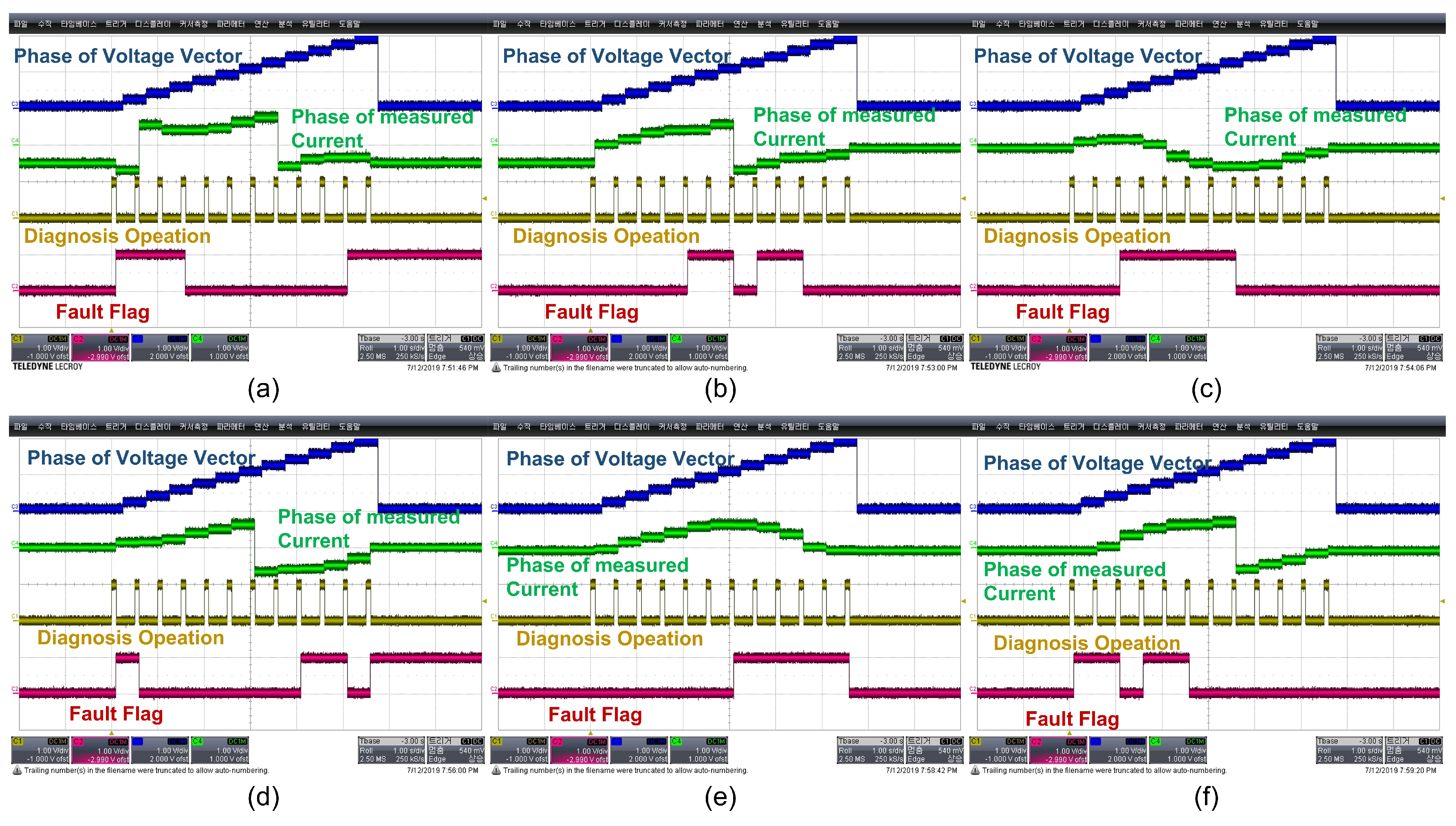
3.2. Open Circuit
4. Simulation and Experiment Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| DOL | Direct online |
| VSI | Voltage source inverter |
| ELM | Extreme learning machine |
| WECS | Wind energy conversion system |
| FPGA | Field-programmable gate array |
| PWM | Pulse-width modulation |
| PMSM | Permanent magnet synchronous motor |
| Synchronization angle | |
| Angle error in | |
| Current angle | |
| - | Stationary reference frame |
| d-q | Synchronous reference frame |
| DESAT | Desaturation protection signal |
| Initial duty for detecting short situations | |
| Duty increment for short situation detection | |
| Voltage vector for open fault detection | |
| Voltage amplitude of |
References
- Akin, B.; Choi, S.; Orguner, U.; Toliyat, H.A. A simple real-time fault signature monitoring tool for motor-drive-embedded fault diagnosis systems. IEEE Trans. Ind. Electron. 2010, 58, 1990–2001. [Google Scholar] [CrossRef]
- Gou, B.; Xu, Y.; Xia, Y.; Wilson, G.; Liu, S. An intelligent time-adaptive data-driven method for sensor fault diagnosis in induction motor drive system. IEEE Trans. Ind. Electron. 2018, 66, 9817–9827. [Google Scholar] [CrossRef]
- Shifat, T.A.; Hur, J.W. An effective stator fault diagnosis framework of BLDC motor based on vibration and current signals. IEEE Access 2020, 8, 106968–106981. [Google Scholar] [CrossRef]
- Khan, S.S.; Wen, H. A comprehensive review of fault diagnosis and tolerant control in DC-DC converters for DC microgrids. IEEE Access 2021, 9, 80100–80127. [Google Scholar] [CrossRef]
- Karimi, S.; Gaillard, A.; Poure, P.; Saadate, S. FPGA-based real-time power converter failure diagnosis for wind energy conversion systems. IEEE Trans. Ind. Electron. 2008, 55, 4299–4308. [Google Scholar] [CrossRef]
- Wu, F.; Zhao, J. A real-time multiple open-circuit fault diagnosis method in voltage-source-inverter fed vector controlled drives. IEEE Trans. Power Electron. 2015, 31, 1425–1437. [Google Scholar] [CrossRef]
- An, Q.-T.; Sun, L.; Sun, L.-Z. Current residual vector-based open-switch fault diagnosis of inverters in PMSM drive systems. IEEE Trans. Power Electron. 2014, 30, 2814–2827. [Google Scholar] [CrossRef]
- Khomfoi, S.; Tolbert, L.M. Fault diagnosis and reconfiguration for multilevel inverter drive using AI-based techniques. IEEE Trans. Ind. Electron. 2007, 54, 2954–2968. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, J.; Zhou, D.; Huang, C. High-performance fault diagnosis in PWM voltage-source inverters for vector-controlled induction motor drives. IEEE Trans. Power Electron. 2014, 29, 6087–6099. [Google Scholar] [CrossRef]
- Cherif, B.D.; Bendjebbar, M.; Benouzza, N.; Boudinar, H.; Bendiabdellah, A. A comparative study between two open-circuit fault detection and localization techniques in a threephase inverter fed induction motor. In Proceedings of the 2016 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016. [Google Scholar]
- Sleszynski, W.; Nieznanski, J.; Cichowski, A. Open-transistor fault diagnostics in voltage-source inverters by analyzing the load currents. IEEE Trans. Ind. Electron. 2009, 56, 4681–4688. [Google Scholar] [CrossRef]
- Sleszynski, W.; Nieznanski, J.; Cichowski, A. Real-time fault detection and localization vector-controlled induction motor drives. In Proceedings of the 2005 European Conference on Power Electronics and Applications, Dresden, Germany, 11–14 September 2005. [Google Scholar]
- Cardoso, A.J.M.; Bento, F. Diagnostics and Fault Tolerance in DC–DC Converters and Related Industrial Electronics Technologies. Electronics 2023, 12, 2341. [Google Scholar] [CrossRef]
- Farhadi, M.; Vankayalapati, B.T.; Sajadi, R.; Akin, B. AC Power Cycling Test Setup and Condition Monitoring Tools for SiC-Based Traction Inverters. IEEE Trans. Veh. Technol. 2023, 72, 12728–12743. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Sobański, P. Simple diagnostic technique of a single IGBT open-circuit faults for a SVM-VSI vector controlled induction motor drive. Bulletin of the Polish Academy of Sciences. Tech. Sci. 2015, 63, 281–288. [Google Scholar]
- Mocevic, S.; Wang, J.; Burgos, R.; Boroyevich, D.; Jaksic, M.; Stancu, C.; Peaslee, B. Comparison and discussion on shortcircuit protections for silicon-carbide MOSFET modules: Desaturation versus Rogowski switch-current sensor. IEEE Trans. Ind. Appl. 2020, 56, 2880–2893. [Google Scholar] [CrossRef]
- Kim, J.; Cho, Y. Overcurrent and short-circuit protection method using desaturation detection of SiC MOSFET. In Proceedings of the 2020 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Seoul, Republic of Korea, 15–19 November 2020; pp. 197–200. [Google Scholar]
- Hou, R.; Lu, J.; Quan, Z.; Li, Y.W. A simple desaturation-based protection circuit for GaN HEMT with ultrafast response. IEEE Trans. Power Electron. 2020, 36, 6978–6987. [Google Scholar] [CrossRef]
- Mutlu, A.; Yildirim, D.; Kueruem, B.A. Advantages of Rogowski Coil over Desaturation Method for Leg Short Circuit Detection in Inverters. In Proceedings of the PCIM Europe 2022; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management, London, UK, 10–12 May 2022; pp. 1–6. [Google Scholar]
- Aryan, N.P.; Vogler, B.; Ziegler, T. An Innovative Method for Short Circuit Protection of a Three-Phase MOSFET Power Inverter. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023. [Google Scholar]
- Tanriverdi, O.; Yildirim, D. Analog dv/dt and di/dt Controlled Gate Driver with Self Triggered Hold-at-Zero Algorithm for High Power IGBTs. IEEE Trans. Power Electron. 2023, 39, 1184–1194. [Google Scholar] [CrossRef]
- Sun, T.; Chen, C.; Wang, S.; Zhang, B.; Fu, Y.; Li, J. Inverter open circuit fault diagnosis based on residual performance evaluation. IET Power Electron. 2023, 16, 2560–2576. [Google Scholar] [CrossRef]
- Wang, B.; Feng, X.; Sun, T.; Wang, Z.; Cheng, M. Relative β-axis Residual Voltage Signal Based Fault Detection for Inverter Switch Open-Circuit Failure. IEEE Trans. Power Electron. 2023, 38, 11315–11326. [Google Scholar] [CrossRef]
- Yan, H.; Peng, Y.; Shang, W.; Kong, D. Open-circuit fault diagnosis in voltage source inverter for motor drive by using deep neural network. Eng. Appl. Artif. Intell. 2023, 120, 105866. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gate | Condition | Fault | Gate | Condition | Fault | Gate | Condition | Fault |
|---|---|---|---|---|---|---|---|---|
| DESAT | DESAT | DESAT | ||||||
| DESAT | DESAT | DESAT | ||||||
| Voltage Vector | FLT | FLT | FLT | FLT | FLT | FLT |
|---|---|---|---|---|---|---|
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - | ||
| () | - | - | - | - |
| Inverter Parameters | Motor Parameters | ||||
|---|---|---|---|---|---|
| Parameters | Value | Unit | Parameters | Value | Unit |
| Maximum Power | 20 | kW | Motor Type | Induction motor | - |
| Continuous Power | 7.2 | kW | Maximum Power | 13 | kW |
| Maximum Current | 480 | Maximum Torque | 54 | Nm | |
| Continuous Current | 150 | Maximum Speed | 7500 | rpm | |
| DC-link Voltage | 24–65 | Stator Resistance | 4.2 | m | |
| DC-link Capacitance | 470 | F | Stator Inductance | 0.543 | mH |
| Switching Frequency | 10 | kHz | Rotor Resistance | 3.4 | m |
| Cooling Type | Air-Cooled | - | Rotor Inductance | 0.551 | mH |
| Controller | DSP (150 MHz) | - | Mutual Inductance | 0.52 | mH |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyon, B.J.; Hwang, D.Y.; Jang, P.; Noh, Y.-S.; Kim, J.-H. Offline Fault Diagnosis for 2-Level Inverter: Short-Circuit and Open-Circuit Detection. Electronics 2024, 13, 1672. https://doi.org/10.3390/electronics13091672
Hyon BJ, Hwang DY, Jang P, Noh Y-S, Kim J-H. Offline Fault Diagnosis for 2-Level Inverter: Short-Circuit and Open-Circuit Detection. Electronics. 2024; 13(9):1672. https://doi.org/10.3390/electronics13091672
Chicago/Turabian StyleHyon, Byong Jo, Dae Yeon Hwang, Pooreum Jang, Yong-Su Noh, and Jin-Hong Kim. 2024. "Offline Fault Diagnosis for 2-Level Inverter: Short-Circuit and Open-Circuit Detection" Electronics 13, no. 9: 1672. https://doi.org/10.3390/electronics13091672
APA StyleHyon, B. J., Hwang, D. Y., Jang, P., Noh, Y. -S., & Kim, J. -H. (2024). Offline Fault Diagnosis for 2-Level Inverter: Short-Circuit and Open-Circuit Detection. Electronics, 13(9), 1672. https://doi.org/10.3390/electronics13091672