
Nonlinear Modeling and Control Strategy Based on Type-II T-S Fuzzy in Bi-Directional DC-AC Converter


Abstract
:1. Introduction
2. Materials and Methods
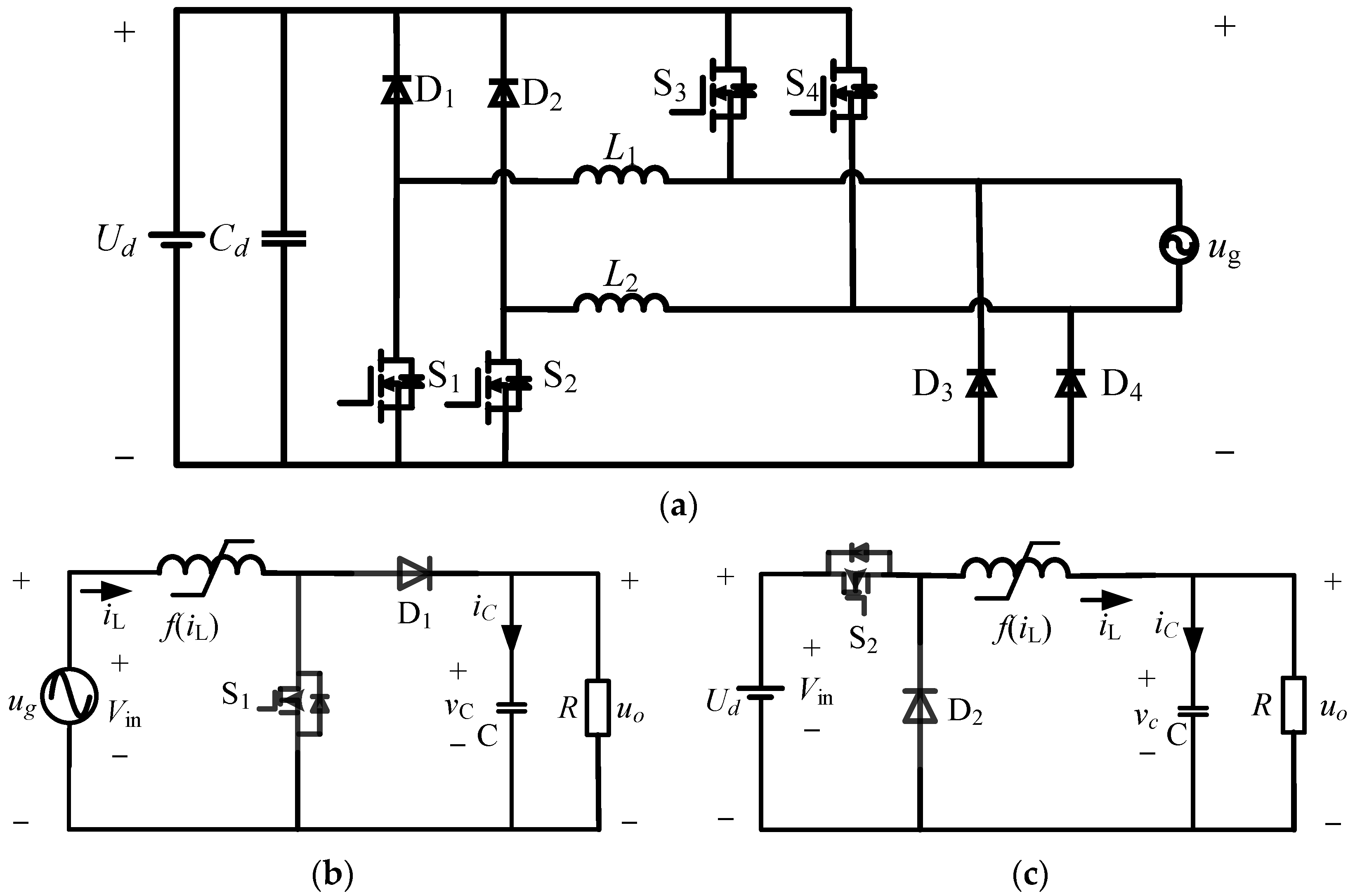
2.1. Mathematical Modeling of Dual-Buck Bi-Directional Converter
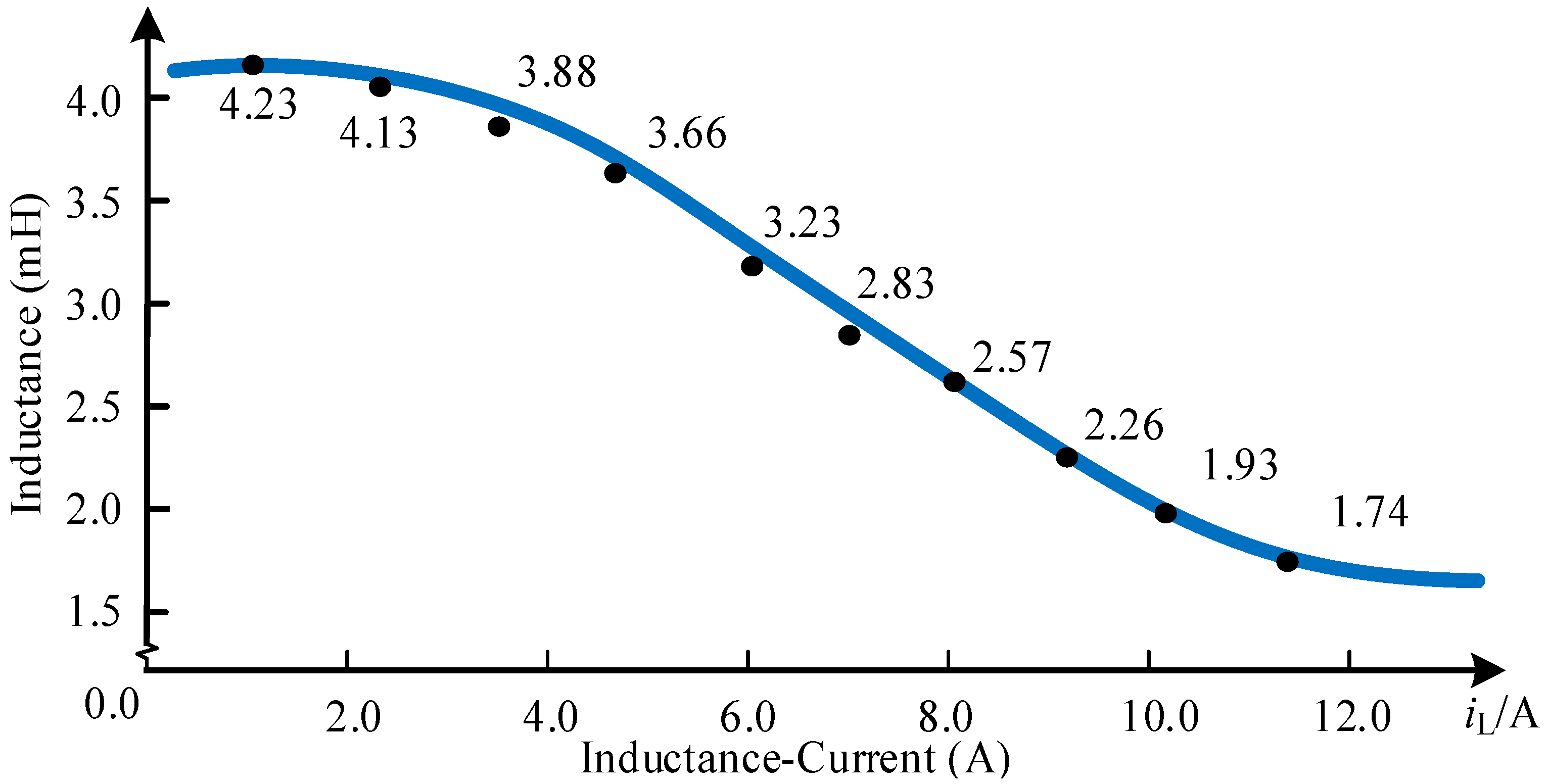
2.2. Nonlinear Inductor Modeling
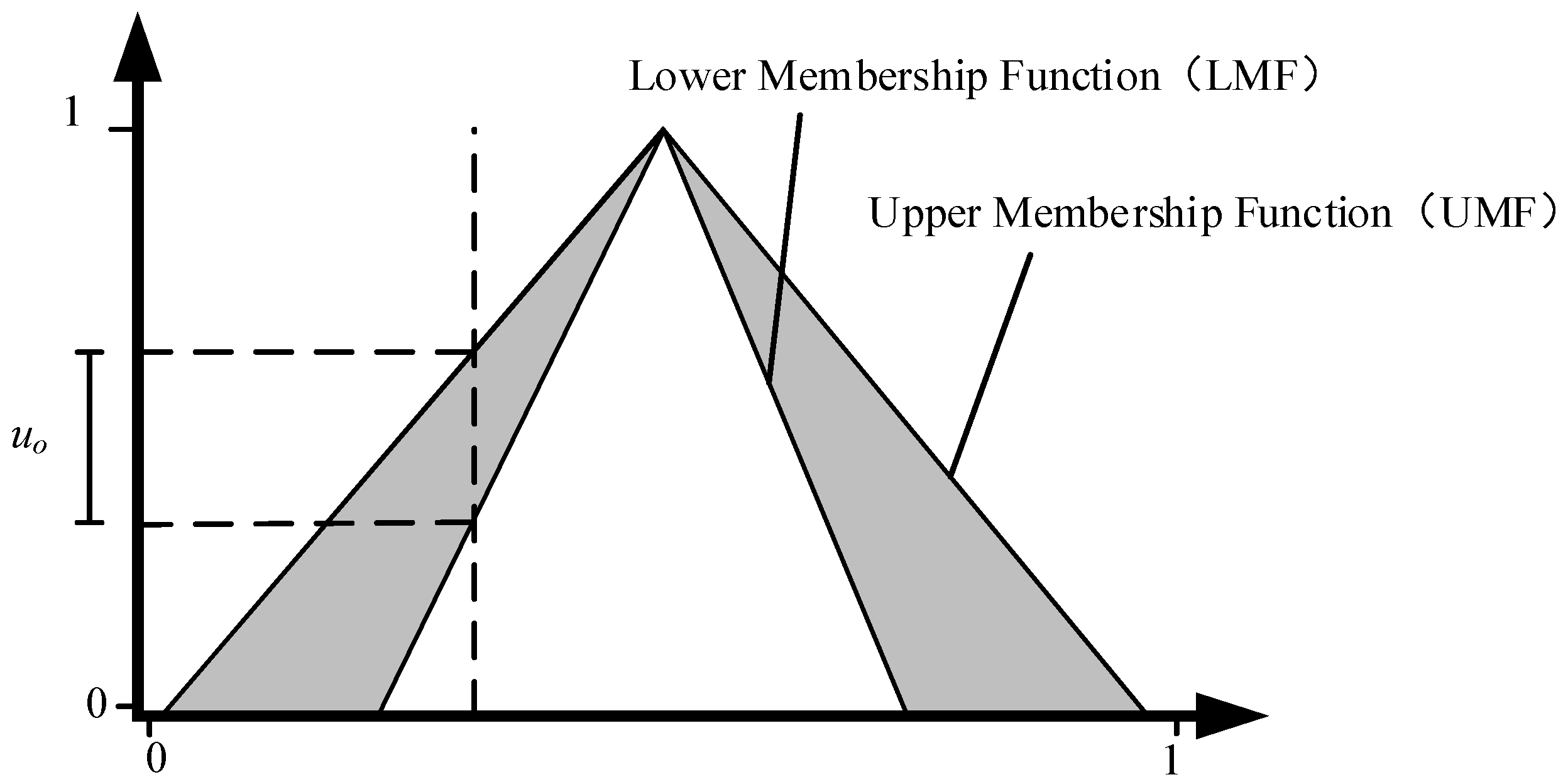
2.3. Type-II T-S Fuzzy Modeling
3. Control Strategy for Dual-Buck Bi-Directional Converter
3.1. Type-II T-S Fuzzy Controller Design
- Rule1: if iL = ILmin, then
- Rule2: if iL = ILmax, then
3.2. Voltage Outer Loop Design
4. Results
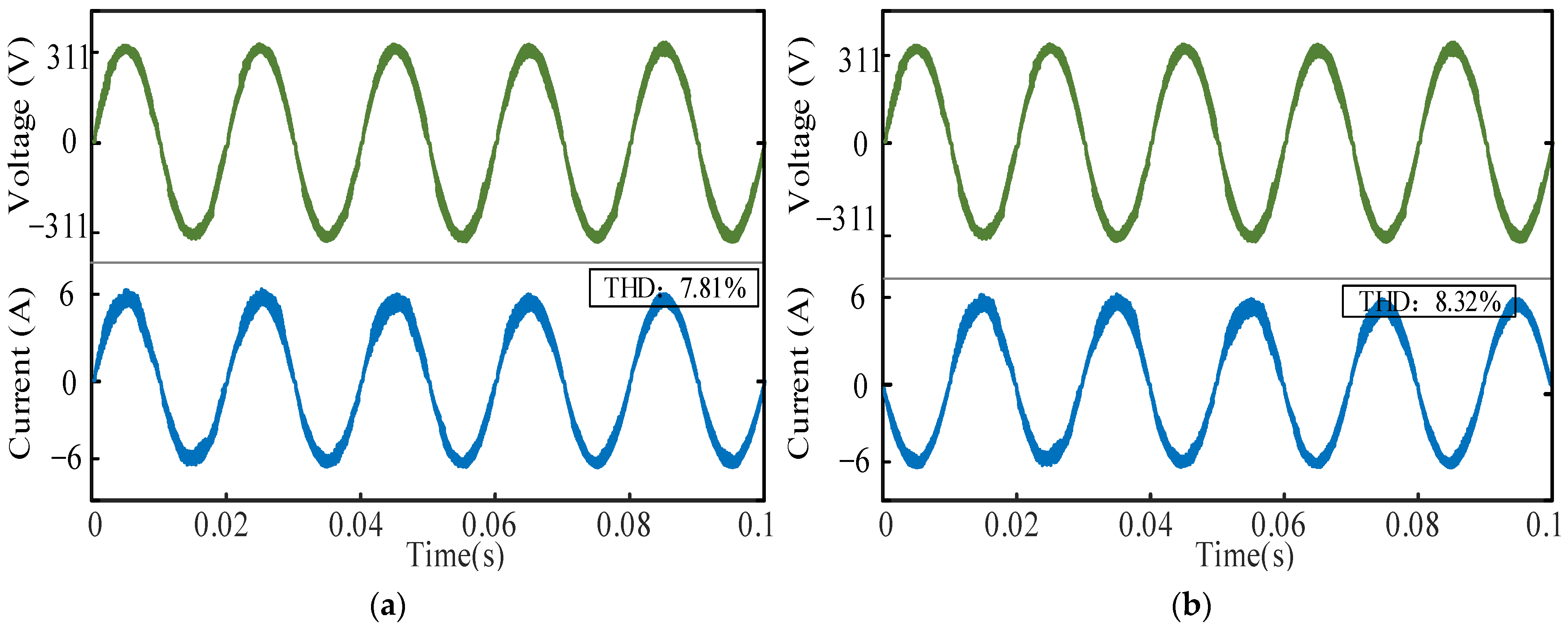
4.1. Simulation Analysis
4.2. Experimental Validation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Y.; Pan, J.Y.; Wen, H.Q.; Fan, M.D.; Chen, R.; He, L.Q.; Xie, M.X.; Norambuena, M.; Xu, L.Y.; Rodriguez, J. Model Predictive Current Control with Low Complexity for Single-Phase Four-Level Hybrid-Clamped Converters. IEEE Trans. Transp. Electrif. 2021, 7, 983–999. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Zhang, R.Q.; Cheng, X.; Yang, L.Q. Flexible Energy Management Protocol for Cooperative EV-to-EV Charging. IEEE Trans. Intell. Transp. Syst. 2019, 20, 172–184. [Google Scholar] [CrossRef]
- Bibak, B.; Tekiner-Mogulkoc, H. Influences of Vehicle to Grid (V2G) On Power Grid: An Analysis by Considering Associated Stochastic Parameters Explicitly. Sustain. Energy Grids Netw. 2021, 26, 100429. [Google Scholar] [CrossRef]
- Chen, Y.W.; Jiang, Z.Y.; Wei, L.Q.; Feng, W.; Zhang, Y.J.; Jiang, J.H. An Asymmetric Full-bridge Bidirectional DC-AC Converter with Power Decoupling and Common-mode Current Suppression for V2G Application. IEEE J. Emerg. Sel. Top. Power Electron. 2024; early access. [Google Scholar] [CrossRef]
- Yang, F.; Ge, H.G.; Yu, Z.L.; Li, Y.; Wu, H.F. Topology and Control of Four-Quadrant Dual-DC-Port Dual-Buck Inverters for Semi-Two-Stage DC–AC Power Conversion. IEEE Trans. Ind. Electron. 2021, 68, 10718–10729. [Google Scholar] [CrossRef]
- Le, T.-T.; Lee, J.; Choi, S. Single-Stage Totem-Pole AC–DC Converter Based on Boost Half-Bridge Structure for Battery Chargers. IEEE Trans. Power Electron. 2024, 39, 1060–1073. [Google Scholar] [CrossRef]
- Koushki, B.; Jain, P.; Bakhshai, A. Half-Bridge Full-Bridge AC–DC Resonant Converter for Bi-Directional EV Charger. IEEE Access 2023, 11, 78737–78753. [Google Scholar] [CrossRef]
- Santis, V.D.; Francesco, A.D.; D’Aloia, A.G. A Numerical Comparison between Preisach, J-A and D-D-D Hysteresis Models in Computational Electromagnetics. Appl. Sci. 2023, 13, 5181. [Google Scholar] [CrossRef]
- Oliveri, A.; Lodi, M.; Storace, M. Nonlinear Models of Power Inductors: A Survey. Int. J. Circuit Theory Appl. 2022, 50, 2–34. [Google Scholar] [CrossRef]
- Scirè, D.; Lullo, G.; Vitale, G. Assessment of the Current for a Non-Linear Power Inductor Including Temperature in DC-DC Converters. Electronics 2023, 12, 579. [Google Scholar] [CrossRef]
- Safamehr, H.; Najafabadi, T.A.; Salmasi, F.R. Enhanced Control of Grid-Connected Inverters with Non-Linear Inductor in LCL Filter. IET Power Electron. 2016, 9, 2111–2120. [Google Scholar] [CrossRef]
- Sgrò, D.; Correia, W.B.; Leão, R.P.S.; Tofoli, F.L.; Tibúrcio, S.A.S. Nonlinear Current Control Strategy for Grid-Connected Voltage Source Converters. Int. J. Electr. Power Energy Syst. 2022, 142, 108349. [Google Scholar] [CrossRef]
- Yao, Z.G.; Lan, H.G.; He, X.Y.; Deng, F.; Wang, C.S.; Lu, S.; Tang, Y. Nonlinear Inductor-Based Single Sensor Current Balancing Method for Interleaved DC–DC Converters. IEEE Trans. Power Electron. 2024, 39, 3996–4000. [Google Scholar] [CrossRef]
- Yin, L.; Chen, Z.F.; Liu, J. Nonlinear Behavior Mechanism and Modeling Method of Wound SMD Inductor. Int. J. Numer. Model. 2023, 36, 1. [Google Scholar] [CrossRef]
- Molina-Santana, E.; Gonzalez-Montañez, F.; Liceaga-Castro, J.U.; Jimenez-Mondragon, V.M.; Siller-Alcala, I. Modeling and Control of a DC-DC Buck–Boost Converter with Non-Linear Power Inductor Operating in Saturation Region Considering Electrical Losses. Mathematics 2023, 11, 4617. [Google Scholar] [CrossRef]
- Divac, S.; Rosić, M.; Zurek, S.; Koprivica, B.; Chwastek, K.; Vesković, M. A Methodology for Calculating the R-L Parameters of a Nonlinear Hysteretic Inductor Model in the Time Domain. Energies 2023, 16, 5167. [Google Scholar] [CrossRef]
- Yang, X.; Yang, J.F.; Fan, J.; Wang, B.; Li, D.Z. A Position-Insensitive Nonlinear Inductive Power Transfer System Employing Saturable Inductor. Energies 2023, 16, 2430. [Google Scholar] [CrossRef]
- Hong, F.; Liu, J.; Ji, B.J.; Zhou, Y.F.; Wang, J.H.; Wang, C.H. Single Inductor Dual Buck Full-Bridge Inverter. IEEE Trans. Ind. Electron. 2015, 62, 4869–4877. [Google Scholar] [CrossRef]
- Viana, C.C.D.; Soong, T.; Lehn, P.W. Single-Input Space Vector Based Control System for Ripple Mitigation on Single-Phase Converters. IEEE Trans. Power Electron. 2019, 34, 3765–3774. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Z.G.; Li, G.J.; He, D.Q.; Chen, Y.M.; Zhang, Z.R.; Li, G.; Song, S.J. Integration of Power Decoupling Buffer and Grid-Tied Photovoltaic Inverter with Single-Inductor Dual-Buck Topology and Single-Loop Direct Input Current Ripple Control Method. Int. J. Electr. Power Energy Syst. 2021, 125, 106423. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. A Review on Interval Type-2 Fuzzy Logic Applications in Intelligent Control. Inf. Sci. 2014, 279, 615–631. [Google Scholar] [CrossRef]
- Rong, N.N.; Wang, Z.S.; Zhang, H.G. Finite-Time Stabilization for Discontinuous Interconnected Delayed Systems via Interval Type-2 T–S Fuzzy Model Approach. IEEE Trans. Fuzzy Syst. 2019, 27, 249–261. [Google Scholar] [CrossRef]
- Yang, X.Z.; Lam, H.K.; Wu, L.G. Membership-Dependent Stability Conditions for Type-1 And Interval Type-2 T–S Fuzzy Systems. Fuzzy Sets Syst. 2019, 356, 44–62. [Google Scholar] [CrossRef]
- Zhao, J.; Xiao, Y.; Liang, Z.C.; Wong, P.K.; Xie, Z.C.; Ma, X.G. Adaptive Event-Triggered Interval Type-2 T-S Fuzzy Control for Lateral Dynamic Stabilization of AEVs With Intermittent Measurements and Actuator Failure. IEEE Trans. Transp. Electrif. 2023, 9, 254–265. [Google Scholar] [CrossRef]
- Liu, C.; Wu, J.X.; Yang, W.D. Robust Control for Interval Type-2 T-S Fuzzy Discrete Systems with Input Delays and Cyber Attacks. J. Syst. Sci. Complex. 2023, 36, 1443–1462. [Google Scholar] [CrossRef]
- Cui, Y.L.; Wang, Y.F.; Ma, X.Y. Parameters Design and Optimization of a High Frequency, Interleaved, Dual-Buck, Bidirectional, Grid-Connected Converter. Electronics 2019, 8, 973. [Google Scholar] [CrossRef]
- Yousef, M.Y.; Mosa, M.A.; Ali, A.A.; Ghany, A.M.A.; Ghany, M.A.A. Load Frequency Control for Power System Considering Parameters Variation Using Parallel Distributed Compensator Based on Takagi-Sugino Fuzzy. Electr. Power Syst. Res. 2023, 220, 109352. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ug | Mode | S1 | S2 | S3 | S4 | D1 | D2 | D3 | D4 |
|---|---|---|---|---|---|---|---|---|---|
| >0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| 2 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | |
| <0 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 |
| ug | Mode | S1 | S2 | S3 | S4 | D1 | D2 | D3 | D4 |
|---|---|---|---|---|---|---|---|---|---|
| >0 | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | |
| <0 | 3 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 |
| I (A) | L (mH) | I (A) | L (mH) | I (A) | L (mH) | I (A) | L (mH) |
|---|---|---|---|---|---|---|---|
| 1 | 4.23 | 6 | 2.83 | 11 | 1.54 | 16 | 0.83 |
| 2 | 4.13 | 7 | 2.57 | 12 | 1.35 | 17 | 0.74 |
| 3 | 3.88 | 8 | 2.26 | 13 | 1.19 | 18 | 0.66 |
| 4 | 3.66 | 9 | 1.96 | 14 | 1.05 | 19 | 0.60 |
| 5 | 3.23 | 10 | 1.71 | 15 | 0.93 | 20 | 0.55 |
| Parameters | Value |
|---|---|
| DC Voltage Reference | 380 V |
| Grid Voltage | 220 V/50 Hz |
| Switching Frequency | 40 kHz |
| Rated Power | 1000 W |
| Filter Capacitance | 1 mF |
| Parameters | Value |
|---|---|
| DC Voltage Reference | 360 V |
| Rated AC Voltage/Frequency | 220 V/50 Hz |
| Rated Power | 1000 W |
| Switching Frequency | 40 kHz |
| Filter Inductance | 3 mH |
| DC-Side Bus Capacitance | 1 mF/450 V |
| Power Switch | MOSEFT SPW24N60C3 (Voltage Withstand: 650 V, Current Withstand: 24 A) |
| Diode | STTH1212D (Reverse Breakdown Voltage Maximum: 1200 V, Current Withstand: 12 A) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Huang, R.; Lin, Q.; Yu, X.; Dan, Z. Nonlinear Modeling and Control Strategy Based on Type-II T-S Fuzzy in Bi-Directional DC-AC Converter. Electronics 2024, 13, 1684. https://doi.org/10.3390/electronics13091684
Chen Z, Huang R, Lin Q, Yu X, Dan Z. Nonlinear Modeling and Control Strategy Based on Type-II T-S Fuzzy in Bi-Directional DC-AC Converter. Electronics. 2024; 13(9):1684. https://doi.org/10.3390/electronics13091684
Chicago/Turabian StyleChen, Zhihua, Ruochen Huang, Qiongbin Lin, Xinhong Yu, and Zhimin Dan. 2024. "Nonlinear Modeling and Control Strategy Based on Type-II T-S Fuzzy in Bi-Directional DC-AC Converter" Electronics 13, no. 9: 1684. https://doi.org/10.3390/electronics13091684
APA StyleChen, Z., Huang, R., Lin, Q., Yu, X., & Dan, Z. (2024). Nonlinear Modeling and Control Strategy Based on Type-II T-S Fuzzy in Bi-Directional DC-AC Converter. Electronics, 13(9), 1684. https://doi.org/10.3390/electronics13091684