A Novel Synchronization Technique for Wireless Power Transfer Systems


Abstract
:
1. Introduction
- (1)
- Presenting a detailed analysis of the synchronization technique and clearly decomposing it into independent frequency locking and reference phase calibration based on mathematical derivations;
- (2)
- Proposing an effective frequency locking circuit that has strong robustness and independence of system parameters;
- (3)
- Achieving reference phase calibration through software code without using additional phase-shift circuits, which advances in easy realization and cost effectiveness;
- (4)
- Realizing the synchronization for WPT systems with multiple active receivers.
2. Synchronization Analysis
2.1. Tuned WPT System with One Active Receiver
2.2. Detuned WPT System with One Active Receiver
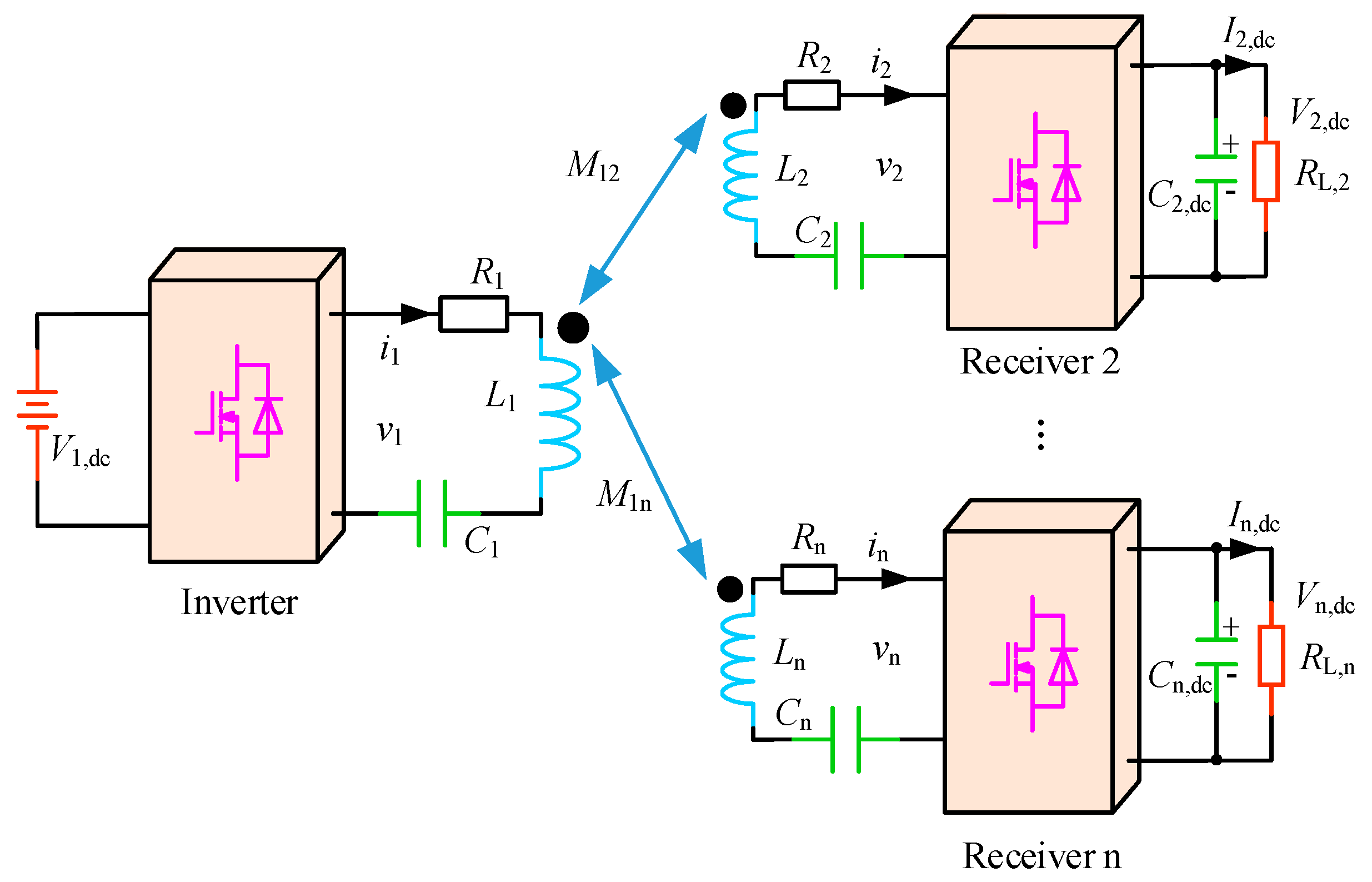
2.3. Multiple Receivers without Cross Coupling
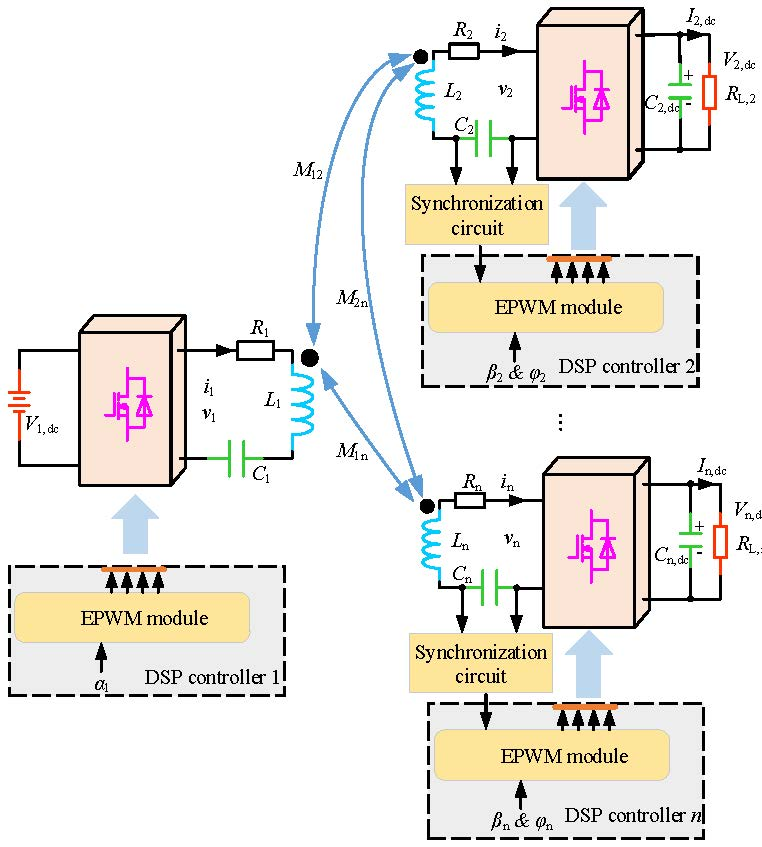
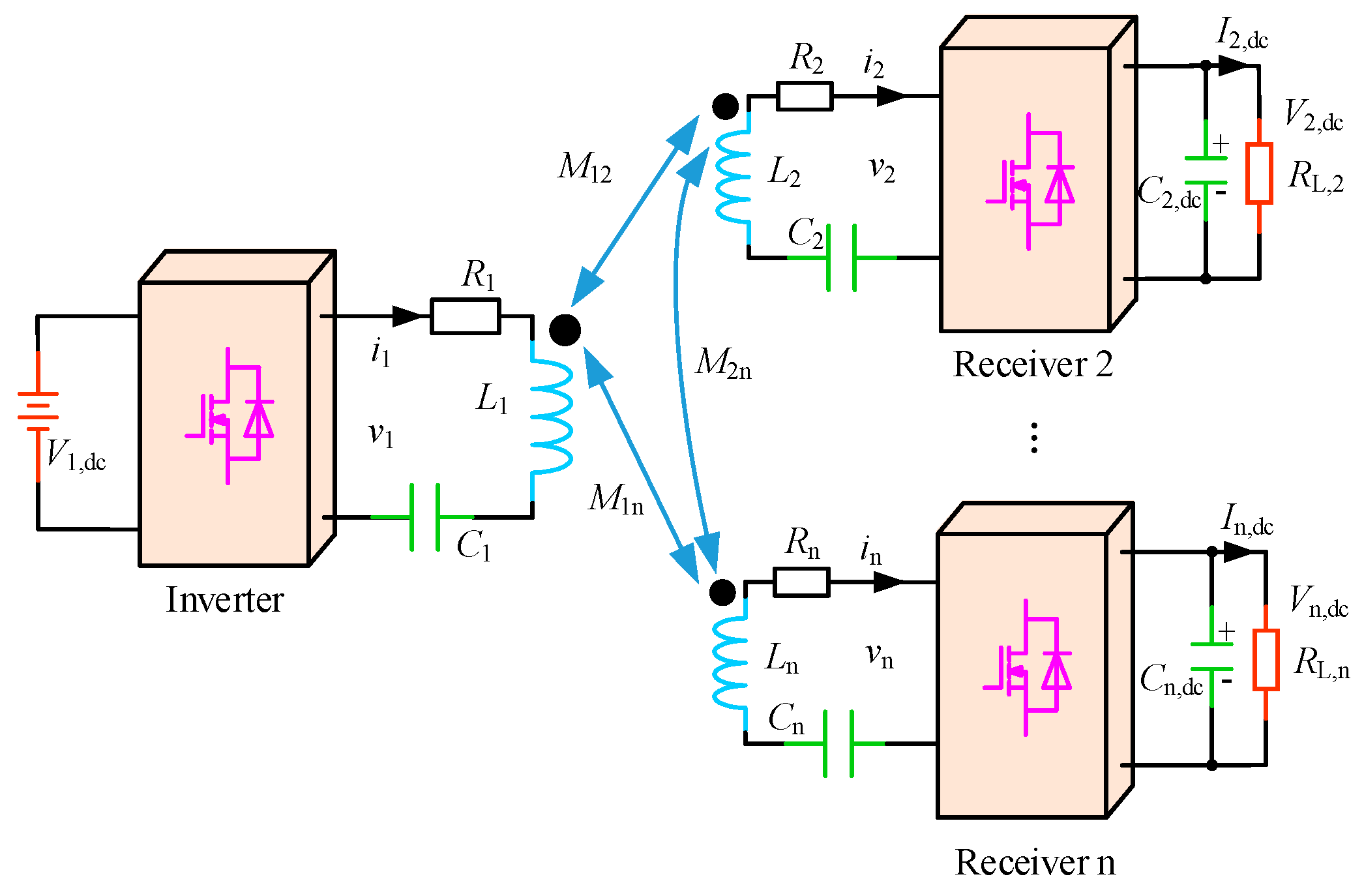
2.4. Multiple Receivers with Cross Coupling
3. Proposed Synchronization Technique
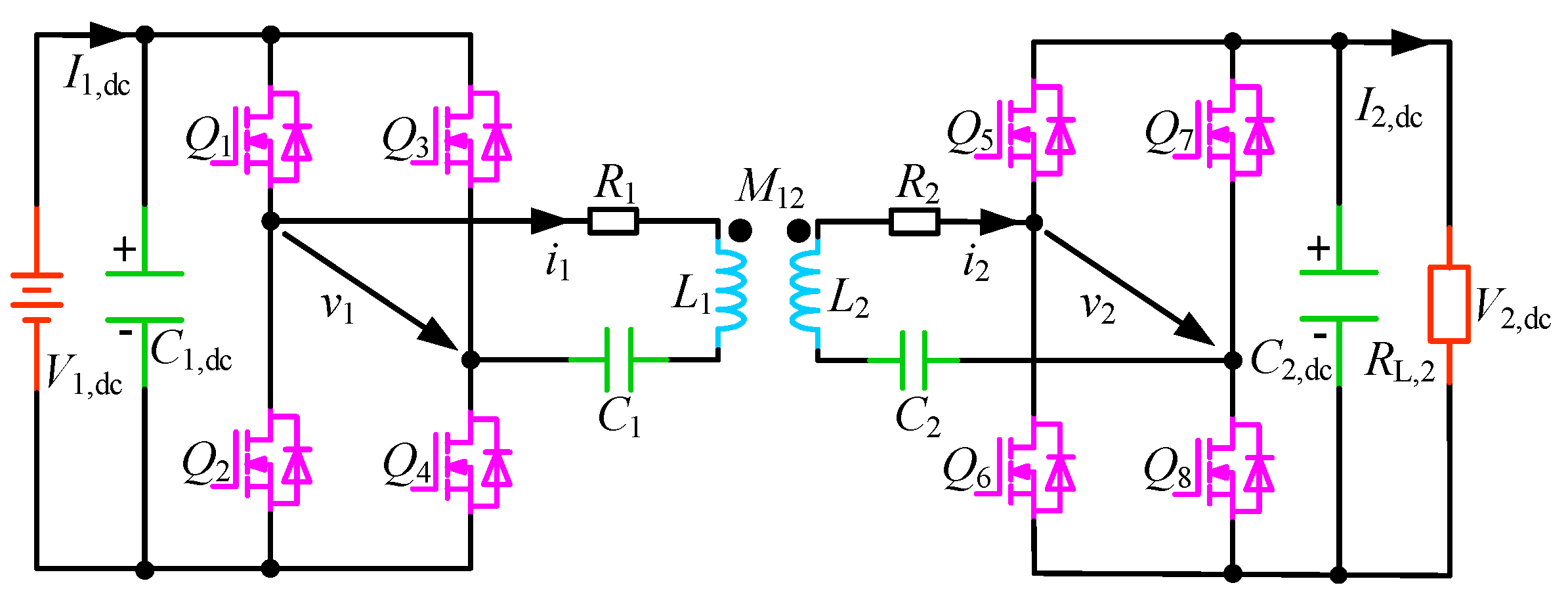
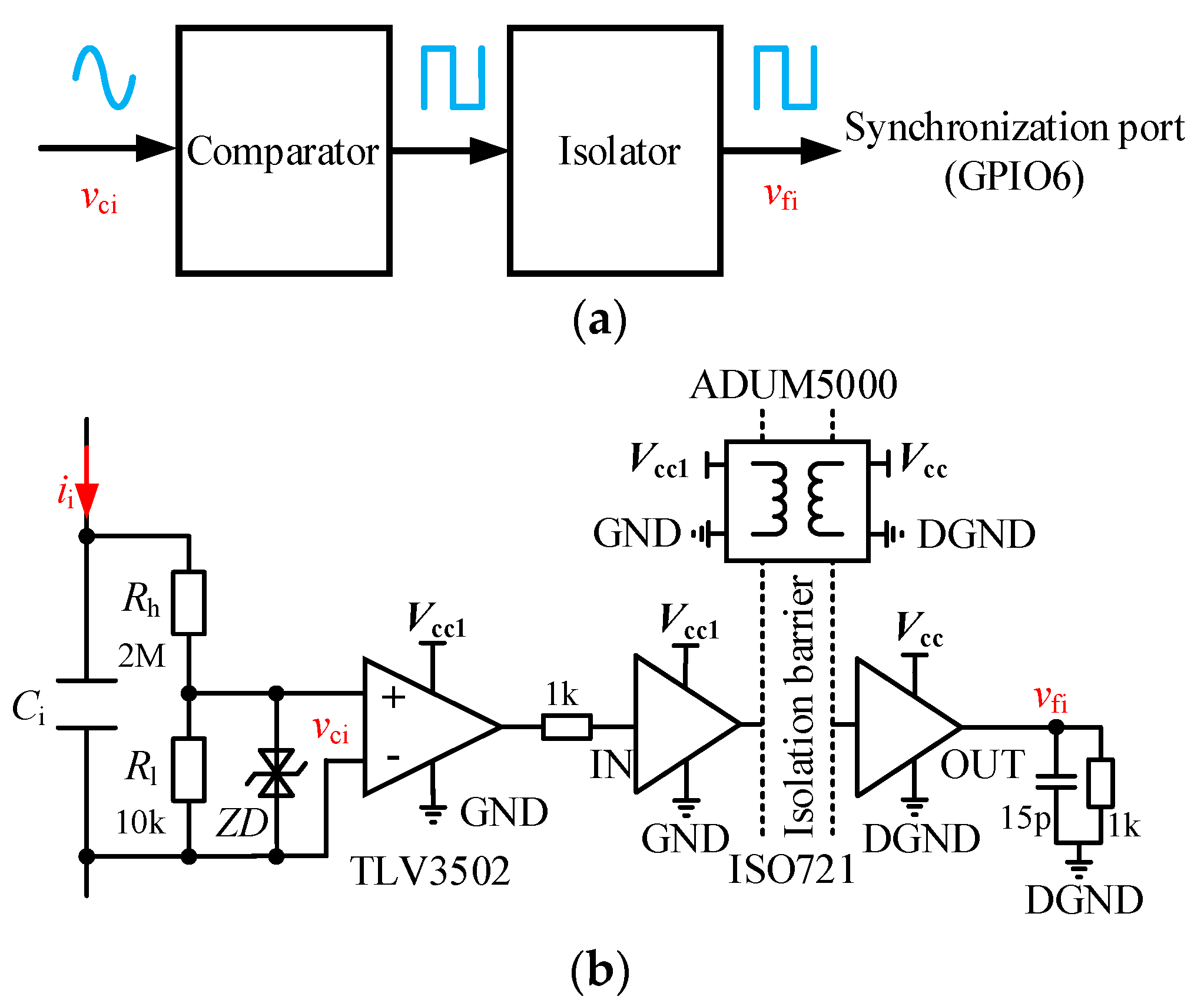
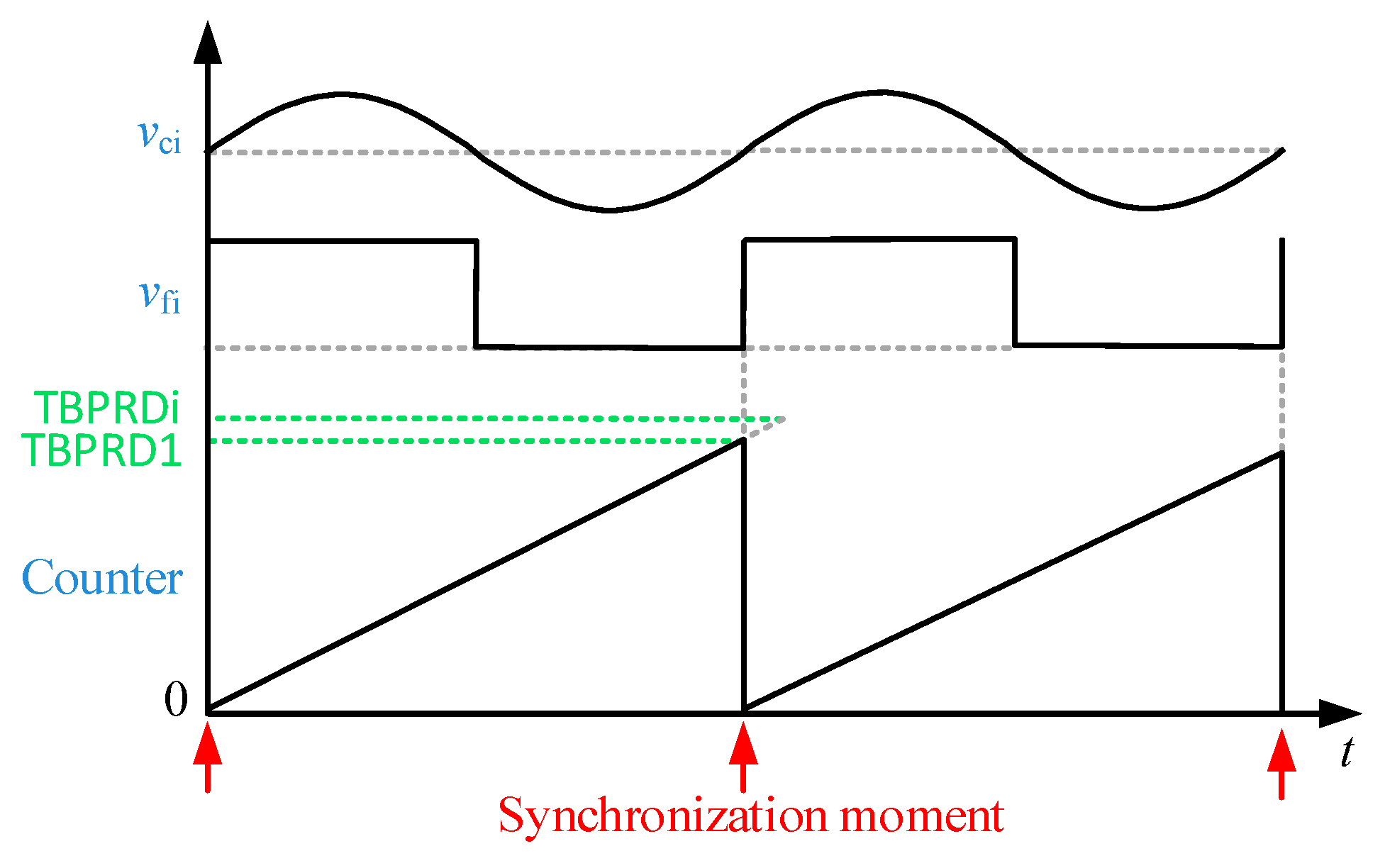
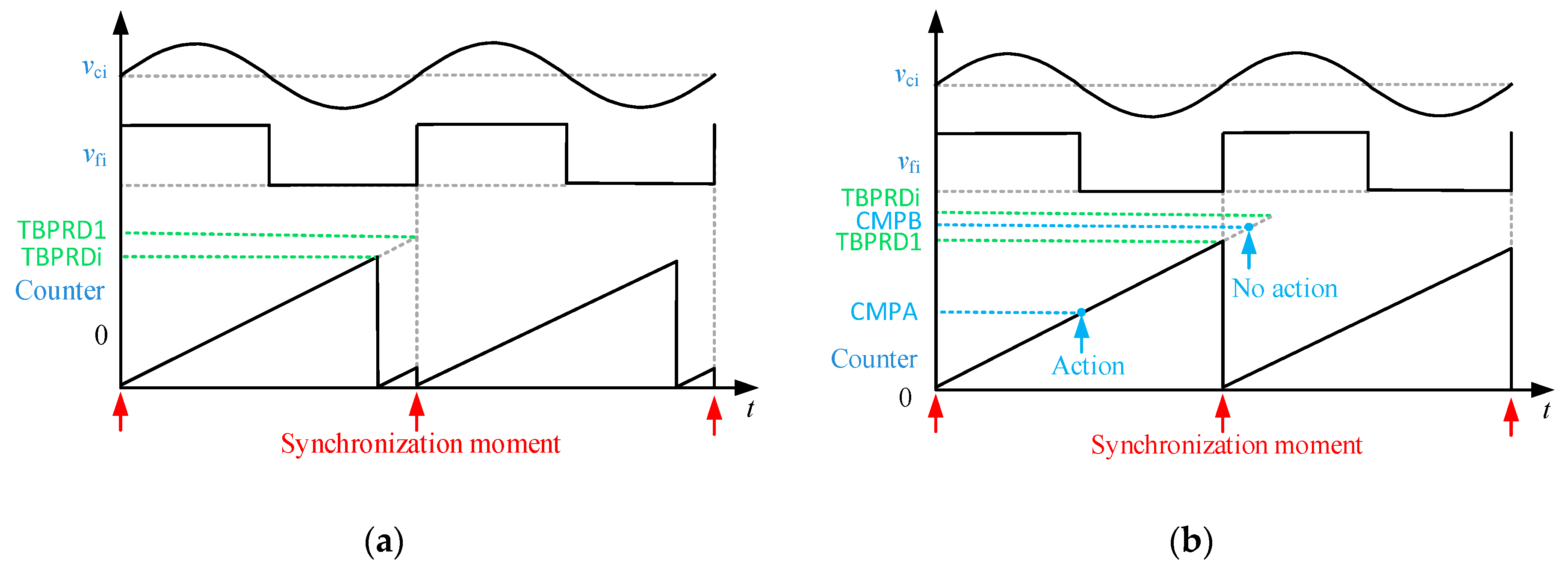
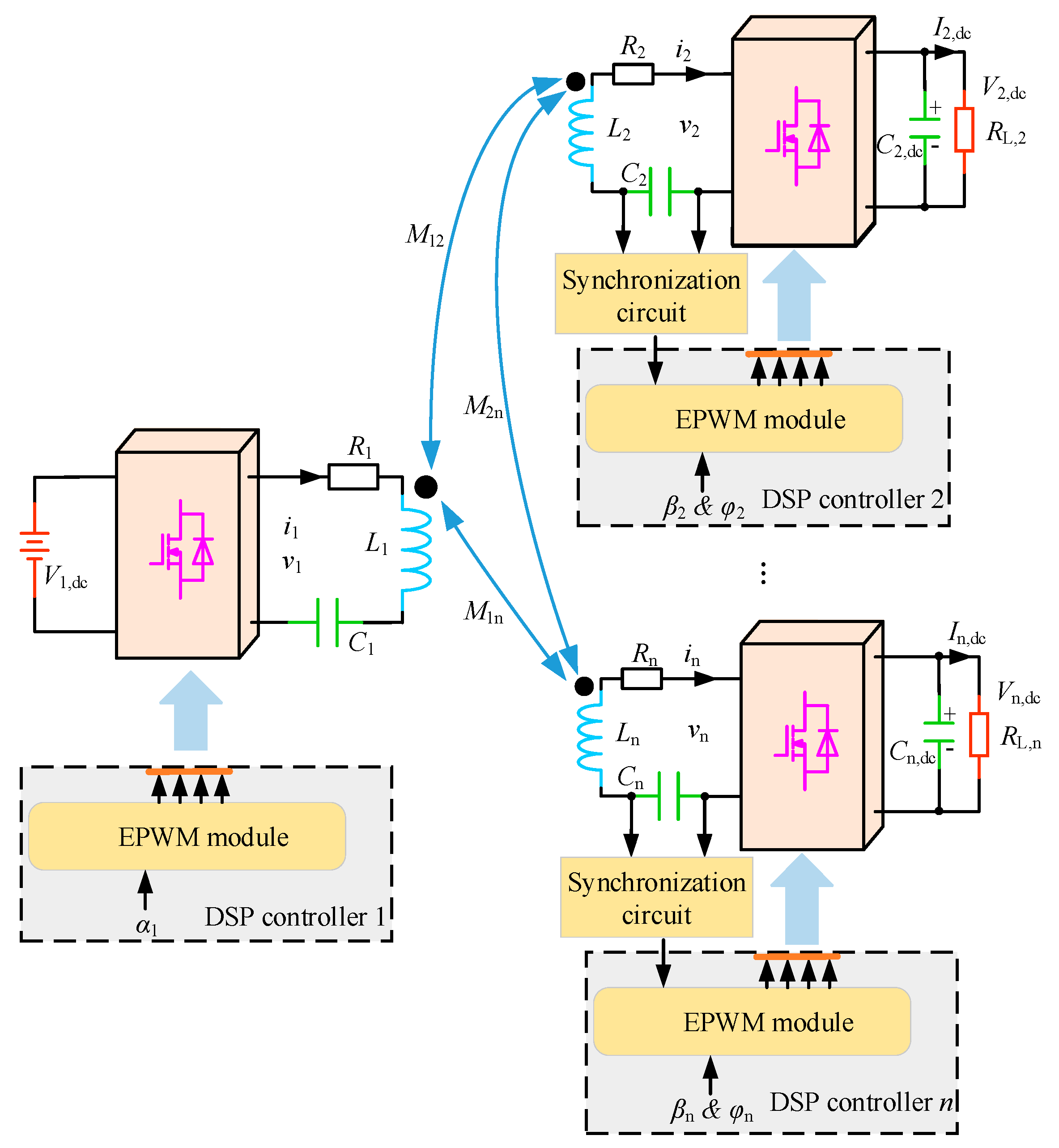
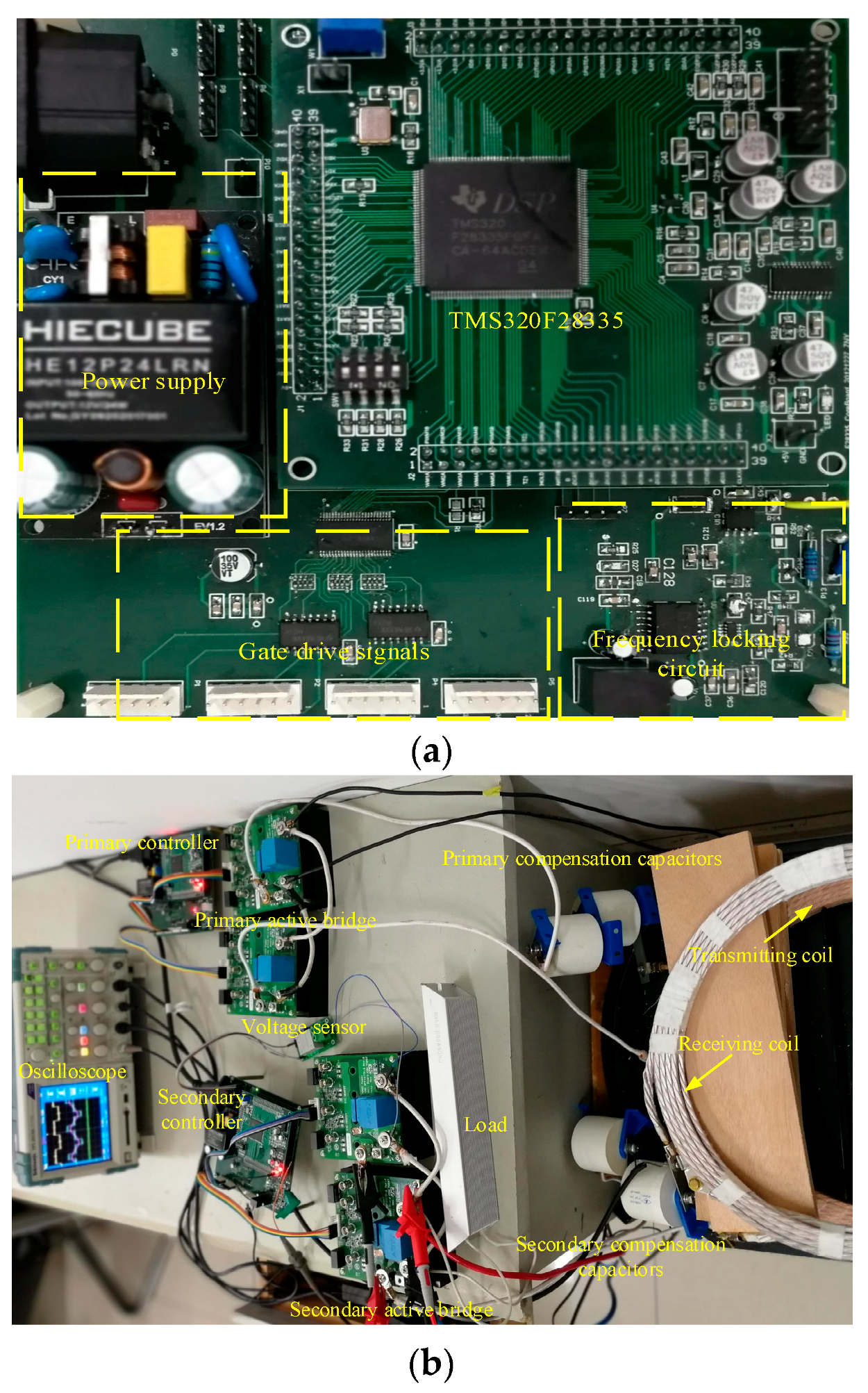
3.1. Hardware Circuit
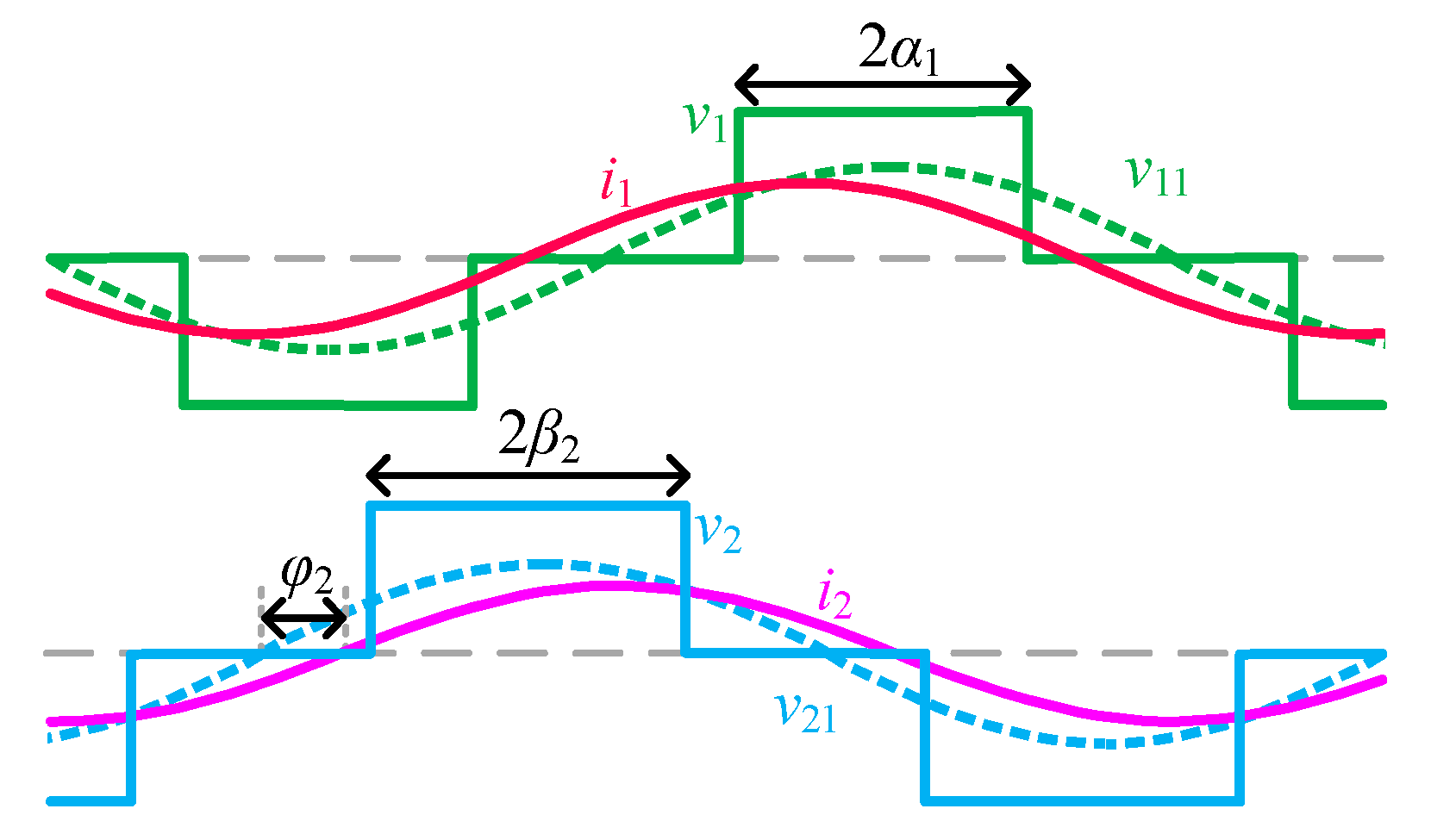
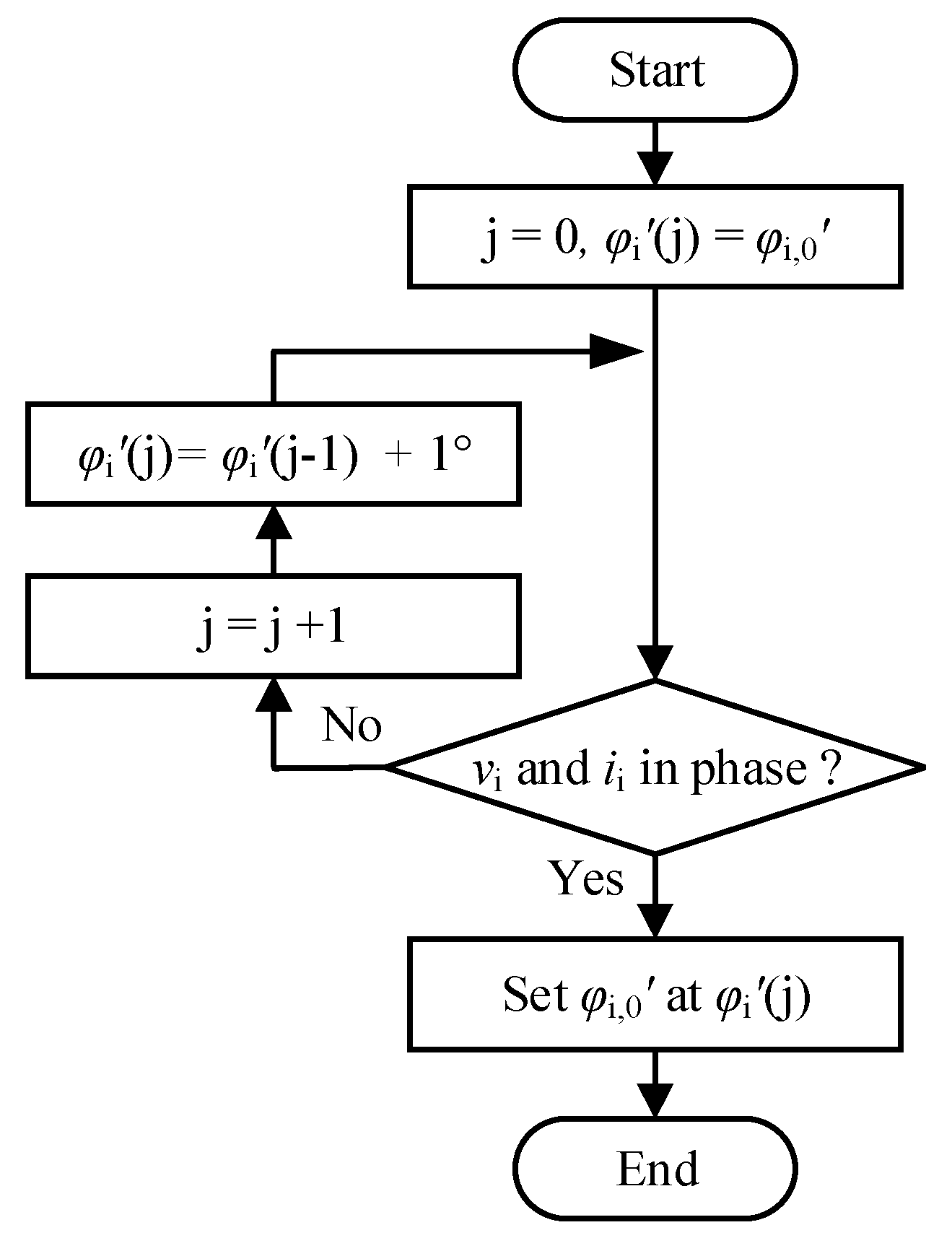
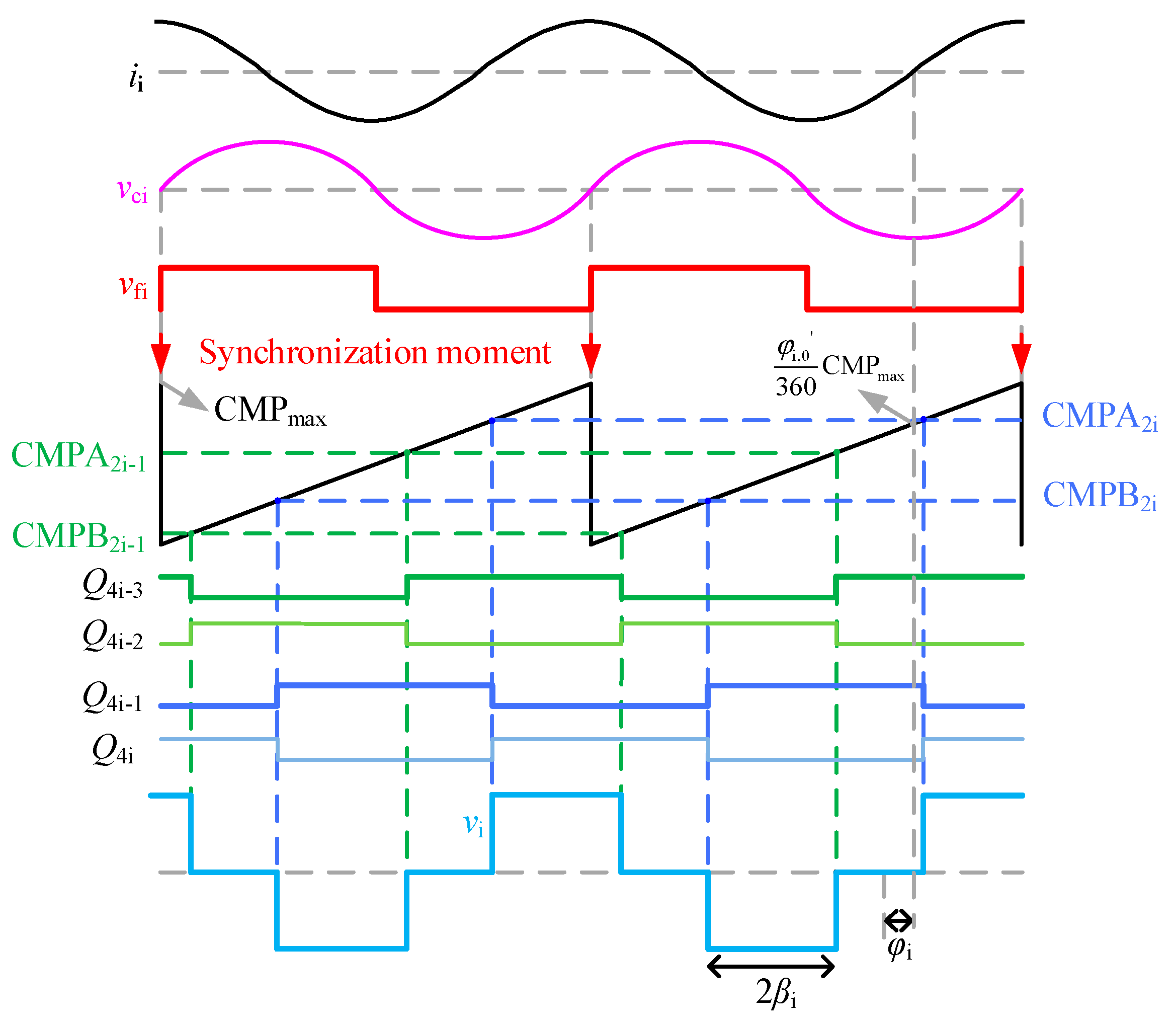
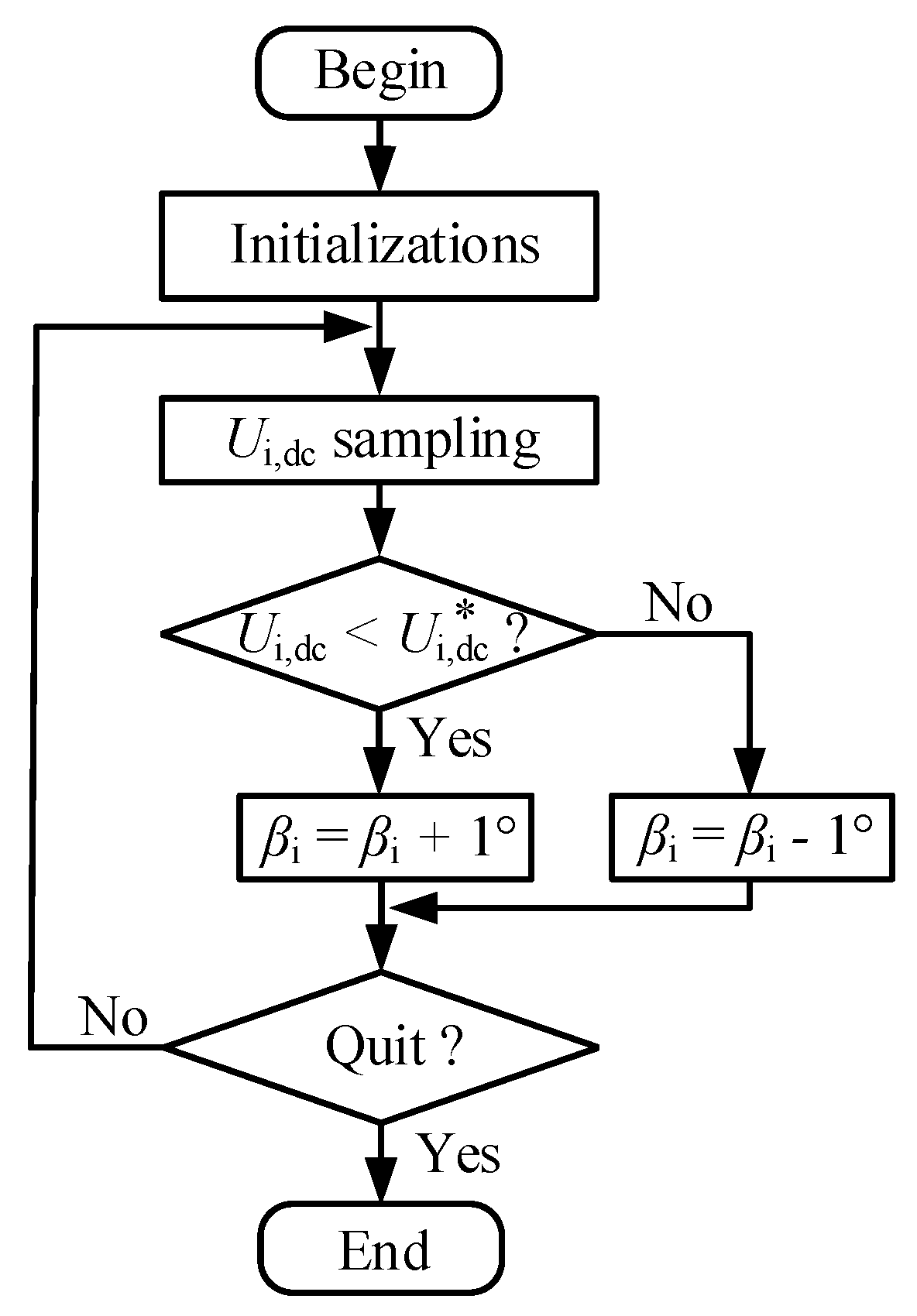
3.2. Software Code
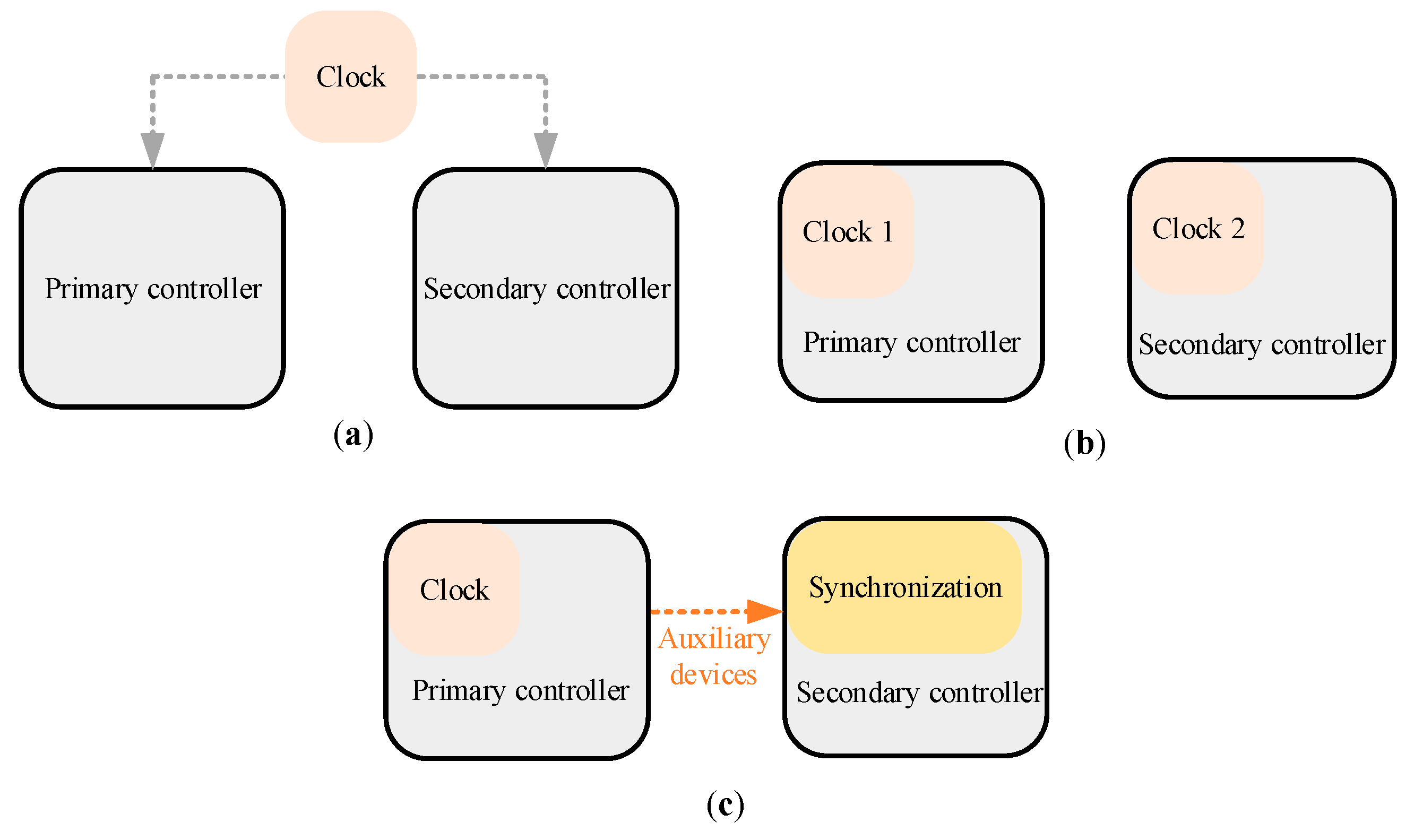
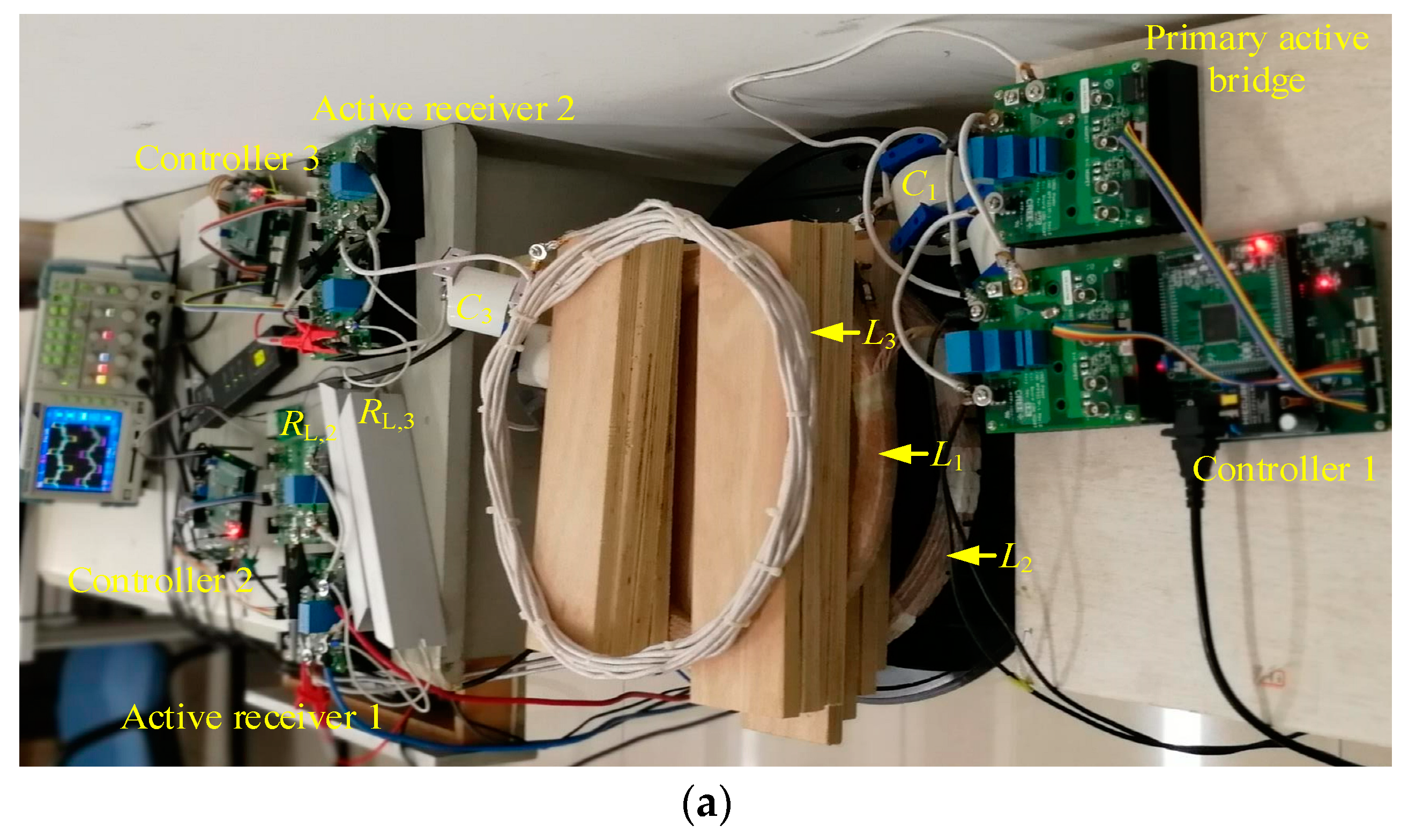
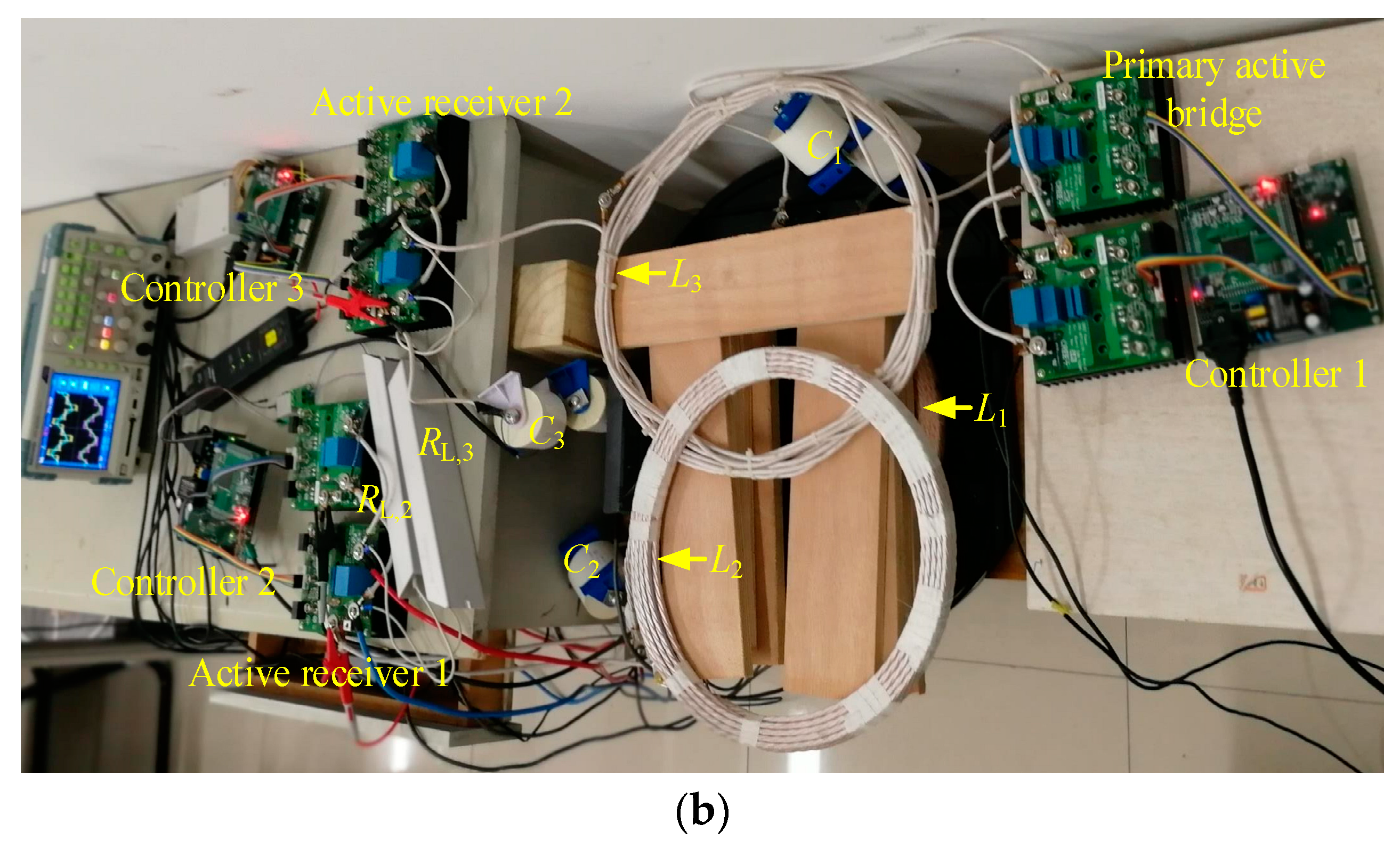
3.3. System Layout
4. Experiment and Discussion
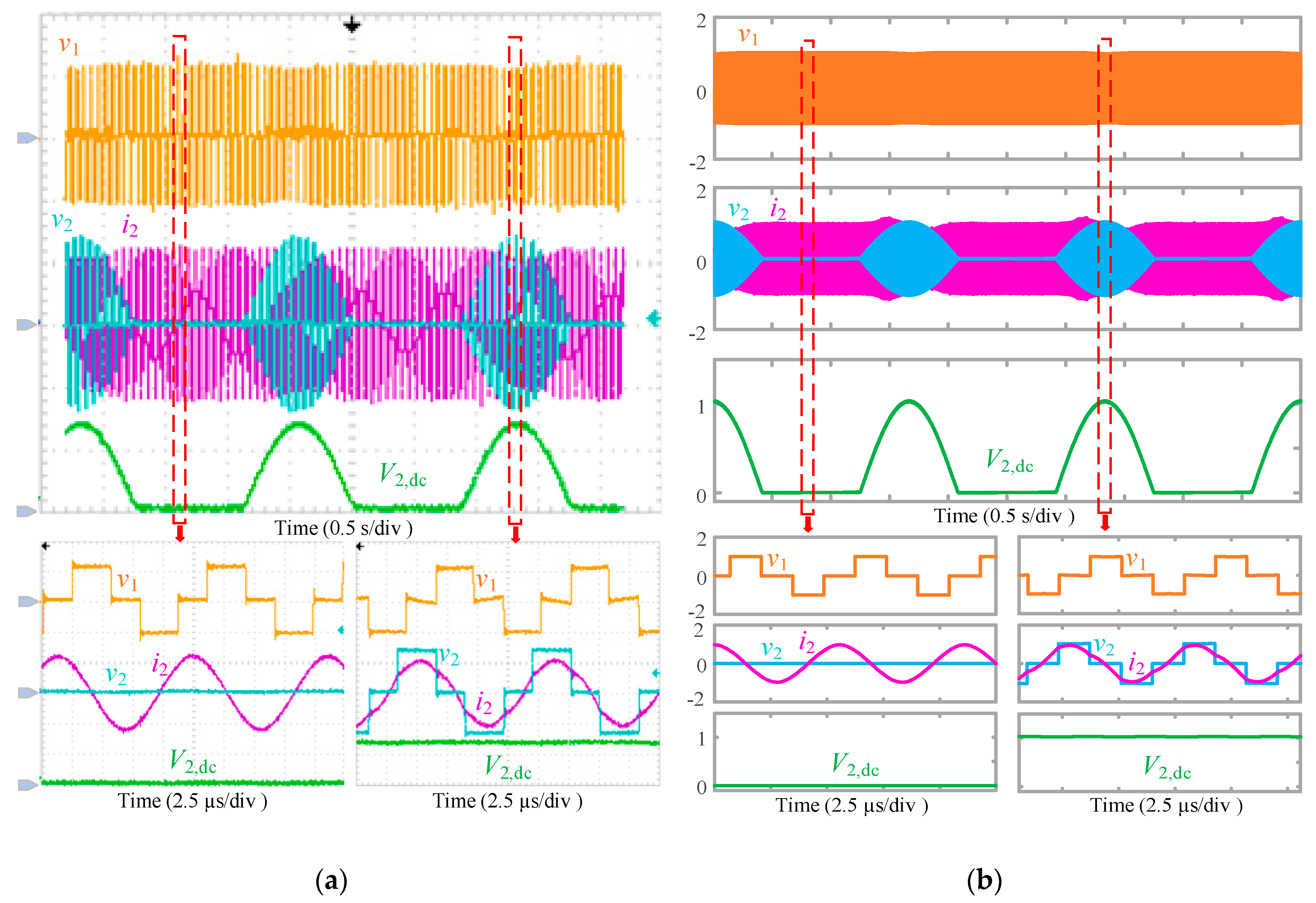
4.1. One active Receiver WPT System
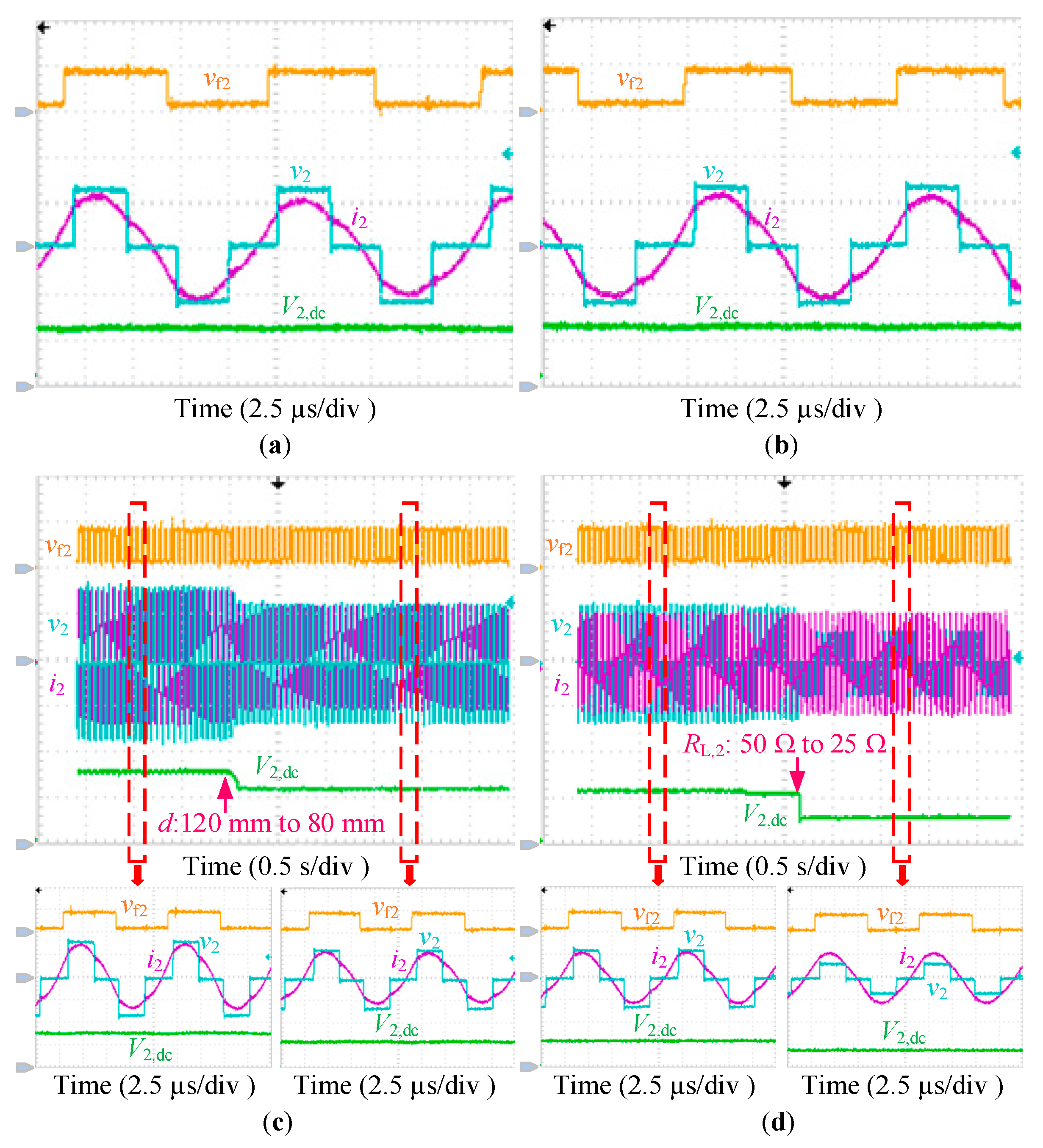
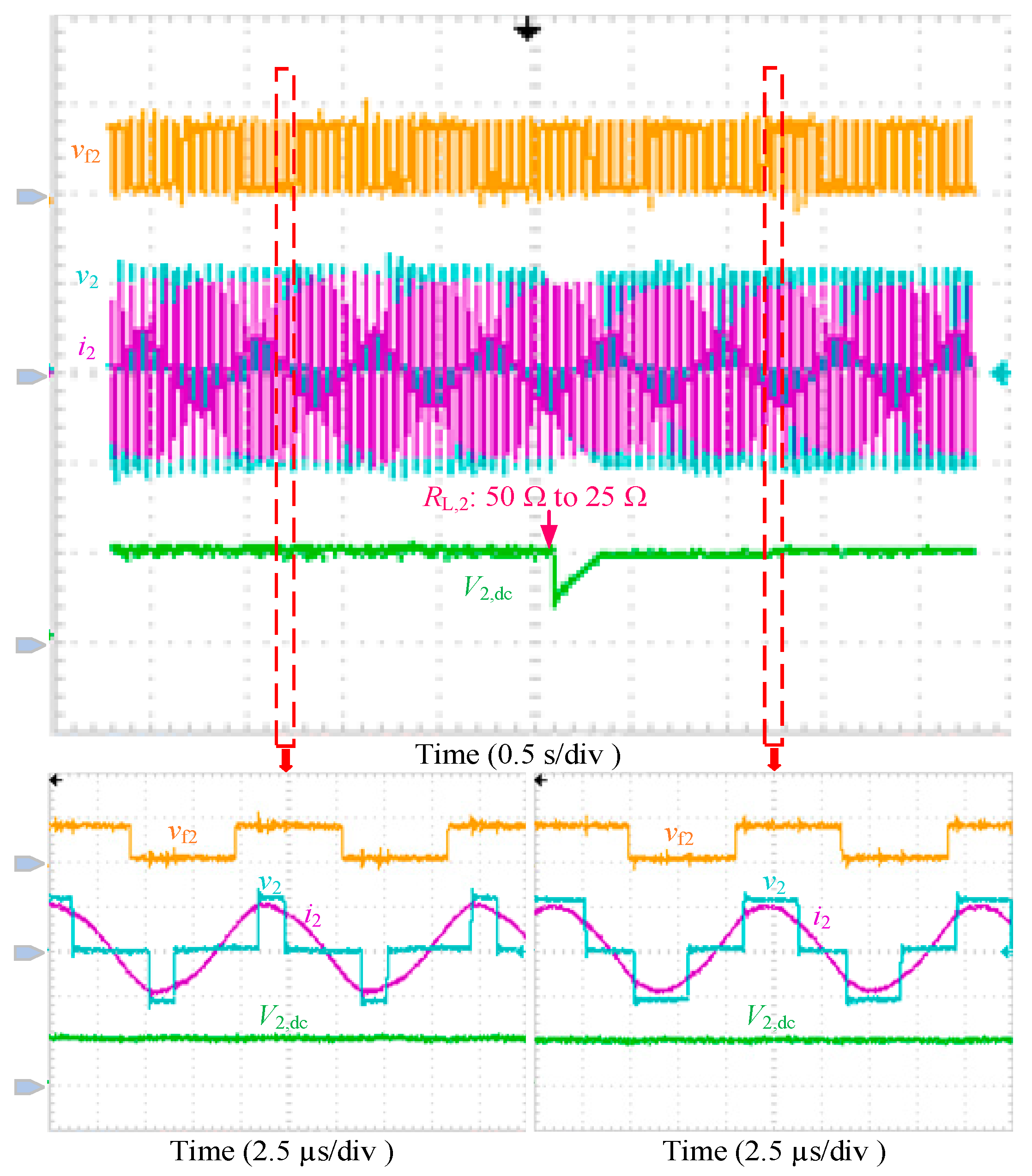
4.2. Multiple Active Receiver Wpt System
4.3. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Kurs, A.; Karalis, A.; Moffatt, R.; Joannopoulos, J.D.; Fisher, P.; Soljacic, M. Wireless power transfer via strongly coupled magnetic resonances. Science 2007, 317, 83–86. [Google Scholar] [CrossRef] [PubMed]
- Almohaimeed, A.M.; Amaya, R.E.; Lima, J.A.; Yagoub, M.C.E. An Adaptive Power Harvester with Active Load Modulation for Highly Efficient Short/Long Range RF WPT Applications. Electronics 2018, 7, 125. [Google Scholar] [CrossRef]
- He, X.; Shu, W.; Yu, B.; Ma, X. Wireless Power Transfer System for Rotary Parts Telemetry of Gas Turbine Engine. Electronics 2018, 7, 58. [Google Scholar] [CrossRef]
- Wang, T.; Liu, X.; Jin, N.; Tang, H.; Yang, X.; Ali, M. Wireless Power Transfer for Battery Powering System. Electronics 2018, 7, 178. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Jin, N.; Habib, S.; Ali, M.; Yang, X.; Tang, H. Analysis and Elimination of Dead-Time Effect in Wireless Power Transfer System. Energies 2018, 11, 1577. [Google Scholar] [CrossRef]
- Li, Y.; Mai, R.; Liu, Y.; He, Z. Efficiency optimising strategy for dual coupled transmitters based WPT systems. Electron. Lett. 2016, 52, 1877–1879. [Google Scholar] [CrossRef]
- Colak, K.; Asa, E.; Bojarski, M.; Czarkowski, D.; Onar, O.C. A Novel Phase-Shift Control of Semibridgeless Active Rectifier for Wireless Power Transfer. IEEE Trans. Power Electron. 2015, 30, 6288–6297. [Google Scholar] [CrossRef]
- Tan, L.; Guo, J.; Huang, X.; Liu, H.; Wang, W.; Yan, C.; Zhang, M.; Yan, C.; Zhang, M. Coordinated source control for output power stabilization and efficiency optimization in WPT systems. IEEE Trans. Power Electron. 2018, 33, 3613–3621. [Google Scholar] [CrossRef]
- Fu, M.; Yin, H.; Zhu, X.; Ma, C. Analysis and tracking of optimal load in wireless power transfer systems. IEEE Trans. Power Electron. 2015, 30, 3952–3963. [Google Scholar] [CrossRef]
- Nauryzbayev, G.; Rabie, K.M.; Abdallah, M.; Adebisi, B. On the Performance Analysis of WPT-based Dual-Hop AF Relaying Networks in α-μ Fading. IEEE Access 2018, 6, 37138–37149. [Google Scholar] [CrossRef]
- Huang, Y.; Shinohara, N.; Mitani, T. A Constant Efficiency of Rectifying Circuit in an Extremely Wide Load Range. IEEE Trans. Microw. Theory Tech. 2018, 62, 986–993. [Google Scholar] [CrossRef]
- Fu, M.; Zhang, T.; Zhu, X.; Ma, C. A 13.56 MHz wireless power transfer system without impedance matching networks. In Proceedings of the 2013 IEEE Wireless Power Transfer Conference (WPTC), Perugia, Italy, 15–16 May 2013; pp. 222–225. [Google Scholar]
- Lee, J.; Han, B. A bidirectional wireless power transfer EV charger using self-resonant PWM. IEEE Trans. Power Electron. 2015, 30, 1784–1787. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Yang, X.; Jin, N.; Tang, H. Analysis and Design of a Wireless Power Transfer System with Dual Active Bridges. Energies 2017, 10, 1588. [Google Scholar] [CrossRef]
- Berger, A.; Agostinelli, M.; Vesti, S.; Oliver, J.A.; Cobos, J.A.; Huemer, M. A Wireless Charging System Applying Phase-Shift and Amplitude Control to Maximize Efficiency and Extractable Power. IEEE Trans. Power Electron. 2015, 30, 6338–6348. [Google Scholar] [CrossRef]
- Neath, M.J.; Swain, A.K.; Madawala, U.K.; Thrimawithana, D.J. An optimal PID controller for a bidirectional inductive power transfer system using multiobjective genetic algorithm. IEEE Trans. Power Electron. 2014, 29, 1523–1531. [Google Scholar] [CrossRef]
- Thrimawithana, D.J.; Madawala, U.K.; Neath, M. A Synchronization Technique for Bidirectional IPT Systems. IEEE Trans. Ind. Electron. 2013, 60, 301–309. [Google Scholar] [CrossRef]
- Madawala, U.K.; Thrimawithana, D.J. A bi-directional inductive power interface for electric vehicles in V2G systems. IEEE Trans. Ind. Electron. 2011, 58, 4789–4796. [Google Scholar] [CrossRef]
- Mohamed, A.A.S.; Berzoy, A.; Mohammed, O. Experimental validation of comprehensive steady-state analytical model of bidirectional WPT system in EVs applications. IEEE Trans. Veh. Technol. 2017, 66, 5584–5594. [Google Scholar] [CrossRef]
- Mai, R.; Liu, Y.; Li, Y.; Yue, P.; Cao, G.; He, Z. An Active Rectifier Based Maximum Efficiency Tracking Method Using an Additional Measurement Coil for Wireless Power Transfer. IEEE Trans. Power Electron. 2018, 33, 716–728. [Google Scholar] [CrossRef]
- Liu, X.; Wang, T.; Yang, X.; Tang, H. Analysis of Efficiency Improvement in Wireless Power Transfer System. IET Power Electron. 2018, 11, 302–309. [Google Scholar] [CrossRef]
- Diekhans, T.; De Doncker, R.W. A dual-side controlled inductive power transfer system optimized for large coupling factor variations and partial load. IEEE Trans. Power Electron. 2015, 30, 6320–6328. [Google Scholar] [CrossRef]
- Bac, X.N.; Vilathgamuwa, D.M.; Foo, G.H.B.; Wang, P.; Ong, A.; Madawala, U.K.; Trong, D.N. An Efficiency Optimization Scheme for Bidirectional Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 6310–6319. [Google Scholar]
- TI Inc. TMS320x2833x, 2823x High Resolution Pulse Width Modulator (HRPWM) Reference Guide; TI Inc.: Dallas, TX, USA, 2009. [Google Scholar]
- Zhao, L.; Thrimawithana, D.J.; Madawala, U.K. Hybrid Bidirectional Wireless EV Charging System Tolerant to Pad Misalignment. IEEE Trans. Ind. Electron. 2017, 64, 7079–7086. [Google Scholar] [CrossRef]
- Thrimawithana, D.J.; Madawala, U.K.; Neath, M.; Geyer, T. A sense winding based synchronization technique for bidirectional IPT pick-ups. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition (ECCE), Phoenix, AZ, USA, 17–22 September 2011; pp. 1405–1410. [Google Scholar]
- Son, Y.; Ha, J.I. Data transmission method without additional circuits in bidirectional wireless power transfer system. In Proceedings of the Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 3717–3721. [Google Scholar]
- Thrimawithana, D.J.; Madawala, U.K.; Neath, M. A P&Q based synchronization technique for Bi-directional IPT pick-ups. In Proceedings of the 2011 IEEE Ninth International Conference on Power Electronics and Drive Systems (PEDS), Singapore, 5–8 December 2011; pp. 40–45. [Google Scholar]
- Tang, Y.; Chen, Y.; Madawala, U.K.; Thrimawithana, D.J.; Ma, H. A New Controller for Bi-directional Wireless Power Transfer Systems. IEEE Trans. Power Electron. 2018, 33, 9067–9087. [Google Scholar] [CrossRef]
- Mai, R.; Ma, L.; Liu, Y.; Yue, P.; Cao, G.; He, Z. A Maximum Efficiency Point Tracking Control Scheme Based on Different Cross Coupling of Dual-Receiver Inductive Power Transfer System. Energies 2017, 10, 217. [Google Scholar] [CrossRef]
- Swain, A.K.; Devarakonda, S.; Madawala, U.K. Modeling, sensitivity analysis, and controller synthesis of multipickup bidirectional inductive power transfer systems. IEEE Trans. Ind. Inform. 2014, 10, 1372–1380. [Google Scholar] [CrossRef]
- Zhao, R.; Gladwin, D.T.; Stone, D.A. Phase shift control based Maximum Efficiency Point Tracking in resonant wireless power system and its realization. In Proceedings of the 42nd Annual Conference of IEEE Industrial Electronics Society (IECON), Florence, Italy, 23–26 October 2016; pp. 4541–4546. [Google Scholar]
- Cree Inc. KIT8020CRD8FF1217P-1 CREE Silicon Carbide MOSFET Evaluation Kit User’s Manual; Cree Inc.: Durham, NC, USA, 2014. [Google Scholar]
- J2954™ NOV2017, SAE J2954. 2017. Available online: https://saemobilus.sae.org/content/J2954_201711 (accessed on 14 June 2018).





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| L1 | coil inductance of transmitter | 61 μH |
| L2 | coil inductance of receiver 1 | 61 μH |
| L3 | coil inductance of receiver 2 | 81 μH |
| C1 | primary compensation capacitance | 0.05 μF |
| C2 | compensation capacitance of receiver 1 | 0.05 μF |
| C3 | compensation capacitance of receiver 2 | 0.04 μF |
| Source | Operating Frequency | Frequency Variation | Mutual Induction Variation | Load Variation | Multiple Receivers | Phase Calibration Method | Complexity |
|---|---|---|---|---|---|---|---|
| [6] | 20 kHz | × | × | √ | × | N/A | N/A |
| [17] | 20 kHz | × | √ | √ | × | Circuit-based | Complex circuit and algorithm |
| [20] | 30 kHz | × | × | √ | × | Circuit-based | N/A |
| [29] | 85 kHz | × | √ | √ | × | Circuit-based | Complex circuit and algorithm |
| This paper | 90 kHz | √ | √ | √ | √ | Software Code | Simple circuit and simplified algorithm |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Jin, N.; Yang, X.; Wang, T.; Hashmi, K.; Tang, H. A Novel Synchronization Technique for Wireless Power Transfer Systems. Electronics 2018, 7, 319. https://doi.org/10.3390/electronics7110319
Liu X, Jin N, Yang X, Wang T, Hashmi K, Tang H. A Novel Synchronization Technique for Wireless Power Transfer Systems. Electronics. 2018; 7(11):319. https://doi.org/10.3390/electronics7110319
Chicago/Turabian StyleLiu, Xin, Nan Jin, Xijun Yang, Tianfeng Wang, Khurram Hashmi, and Houjun Tang. 2018. "A Novel Synchronization Technique for Wireless Power Transfer Systems" Electronics 7, no. 11: 319. https://doi.org/10.3390/electronics7110319
APA StyleLiu, X., Jin, N., Yang, X., Wang, T., Hashmi, K., & Tang, H. (2018). A Novel Synchronization Technique for Wireless Power Transfer Systems. Electronics, 7(11), 319. https://doi.org/10.3390/electronics7110319