SBL-Based Direction Finding Method with Imperfect Array



Abstract
:1. Introduction
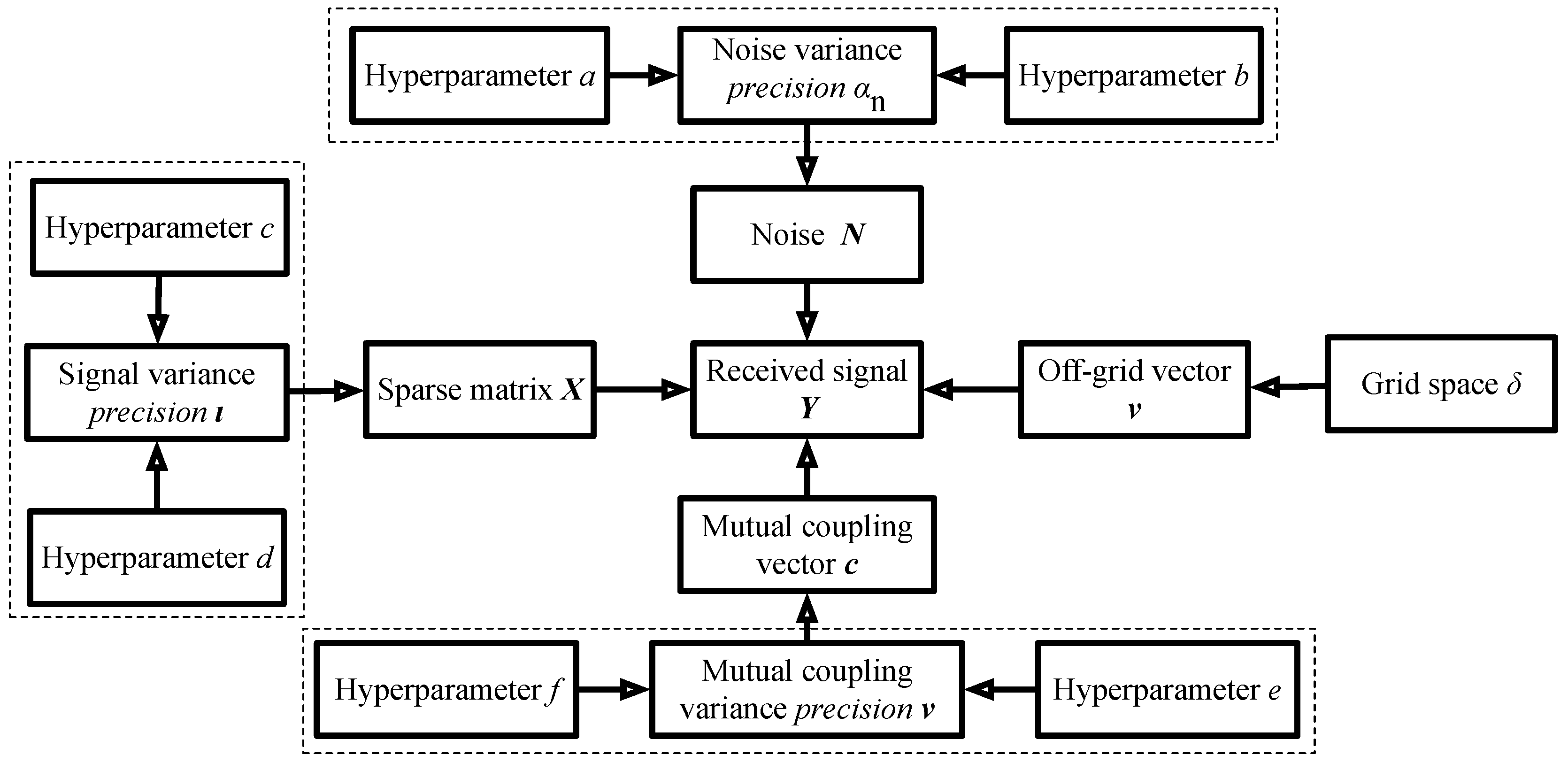
- The SBL-based system model with mutual coupling effect: With considering both the off-grid and the unknown mutual coupling problems, a novel system model is formulated and transforms the direction finding problems into a sparse reconstruction problem.
- The DFSM method for direction finding estimation: With the distribution assumptions of all unknown parameters, a novel SBL-based direction finding method with unknown mutual coupling effect, named DFSMC, is proposed. DFSMC method estimates the directions via updating all the unknown parameters alternatively and achieves better estimation performance than the state-of-art methods.
- The theoretical estimation expressions for all unknown parameters: In the proposed DFSMC method, the EM method is adopted to estimate all the unknown parameters including the noise variance, the received signals, the mutual coupling vector, and the off-grid vectors, et al. With the distribution assumptions, we theoretically derive the expressions for all the unknown parameters.
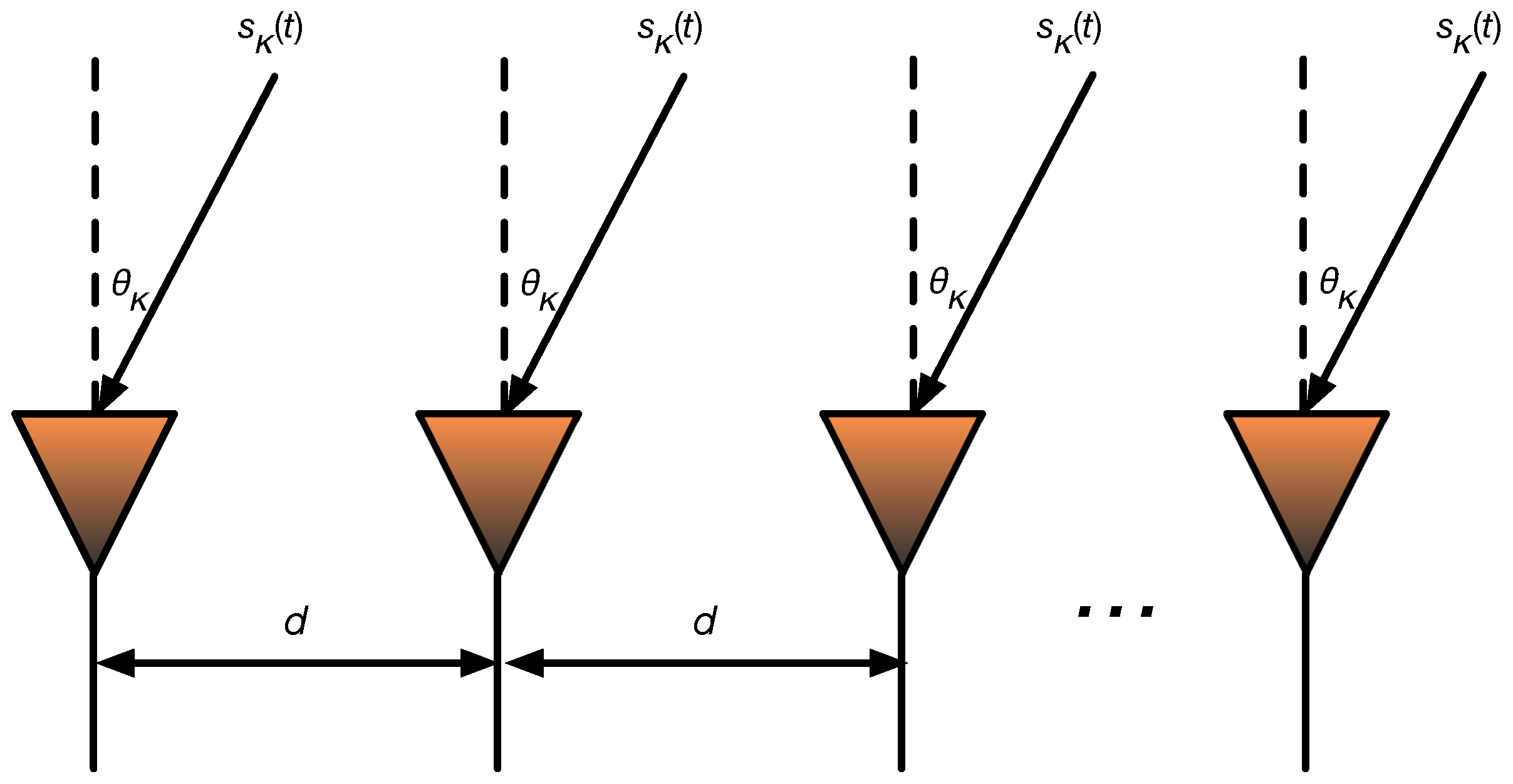
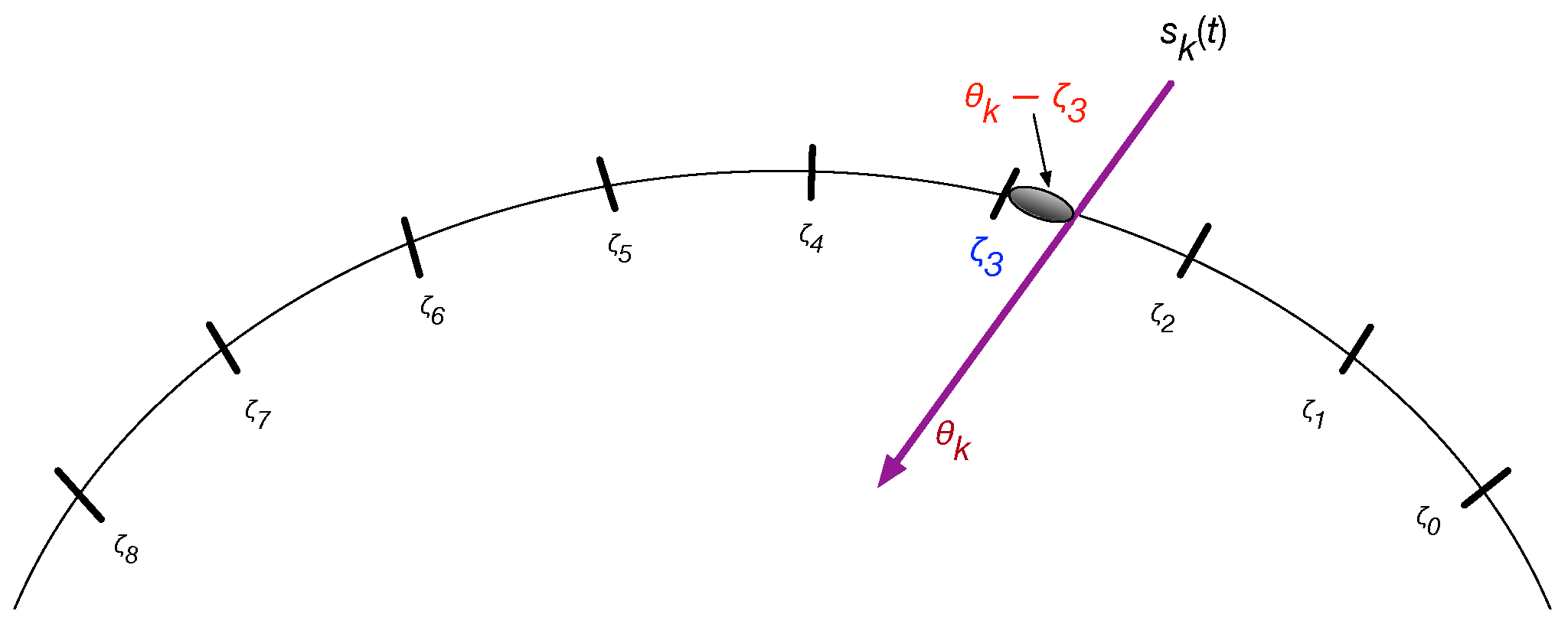
2. ULA System for Direction Finding
3. Direction Finding Method Based on Sparse Bayesian Learning
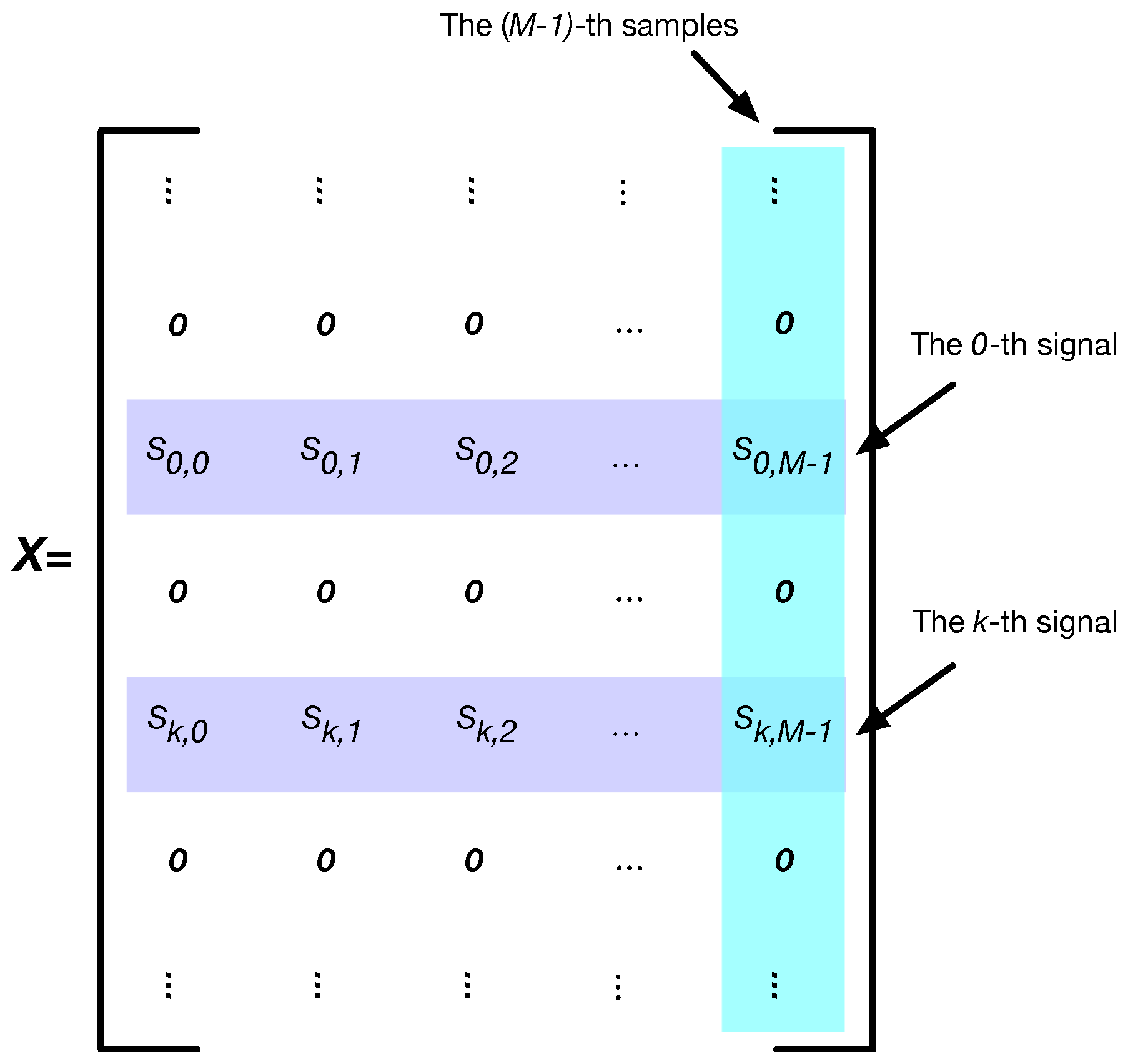
3.1. Sparse-Based Signal Model
3.2. Distribution Assumptions
- Noise : Gaussian distribution;
- The precision of noise variance : Gamma distribution;
- Sparse matrix : Gaussian distribution;
- The precision of signal variance : Gamma distribution;
- Mutual coupling vector : Gaussian distribution;
- The precision of mutual coupling variance : Gamma distribution;
- Off-grid vector : Uniform distribution.
3.2.1. The Distribution of Noise
3.2.2. The Distribution of Noise Variance
3.2.3. The Distribution of Sparse Matrix
3.2.4. The Distribution of Signal Variance
3.2.5. The Distribution of Mutual Coupling Vector
3.2.6. The Distribution of Mutual Coupling Variance
3.2.7. The Distribution of Off-Grid Vector
3.3. DFSMC Method
3.3.1. The Sparse Matrix
3.3.2. The Mutual Coupling Vector
- For : With the derivations of complex vector and matrix in Appendix A, is a row vector, and the n-th entry can be calculated asAdditionally, we can calculatewhere is a vector with the n-th entry being 1 and other entries being 0. Therefore, the n-th entry in (42) can be simplified asand we finally have the derivation of as
- can be simplified as
- can be simplified as .
3.3.3. For the Precision of Signal Variance
3.3.4. For
3.3.5. For the Precision of Mutual Coupling Variance
3.3.6. For the Off-Grid Vector
| Algorithm 1 DFSMC algorithm for direction finding with the unknown mutual coupling effect. |
|
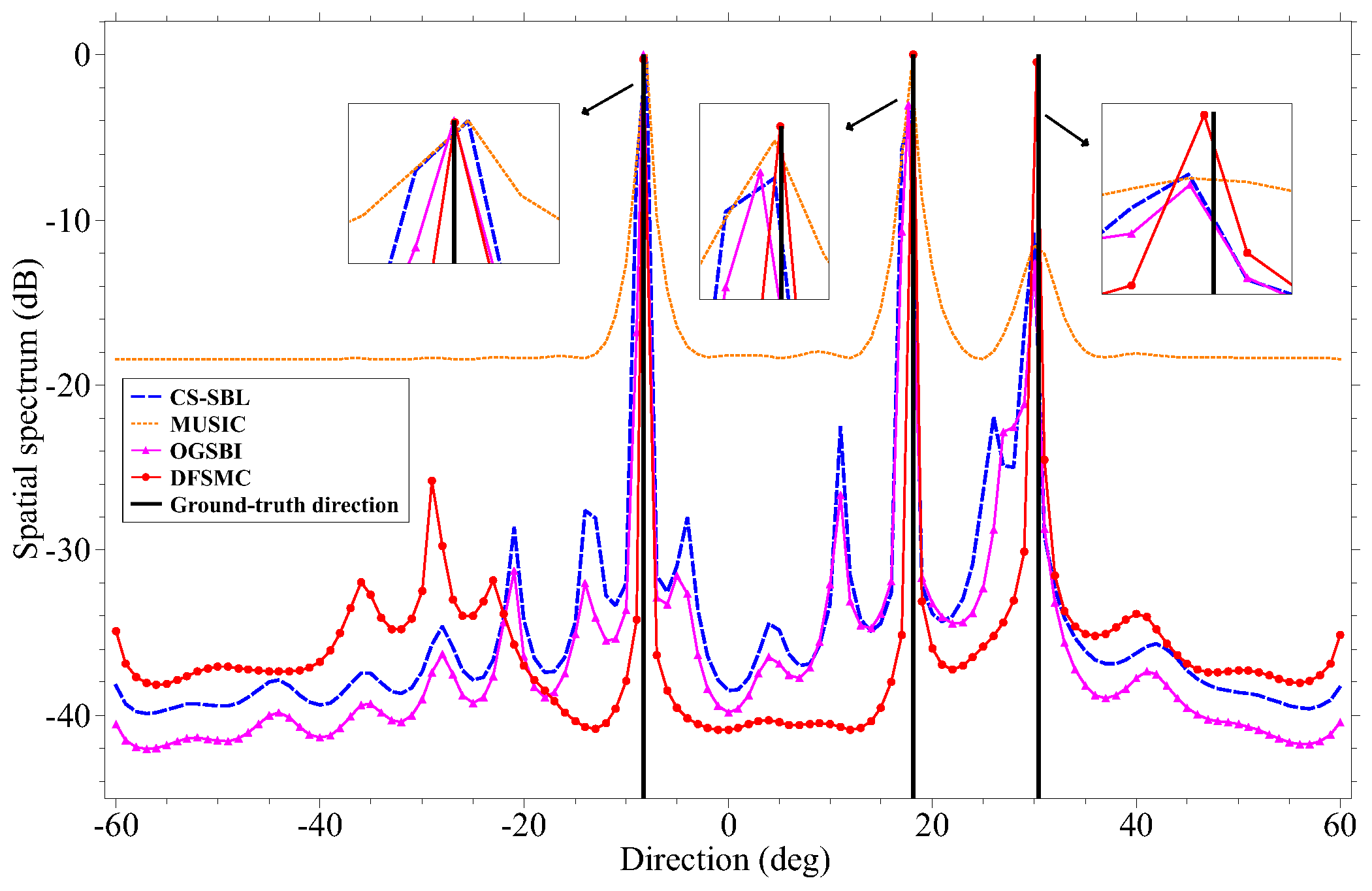
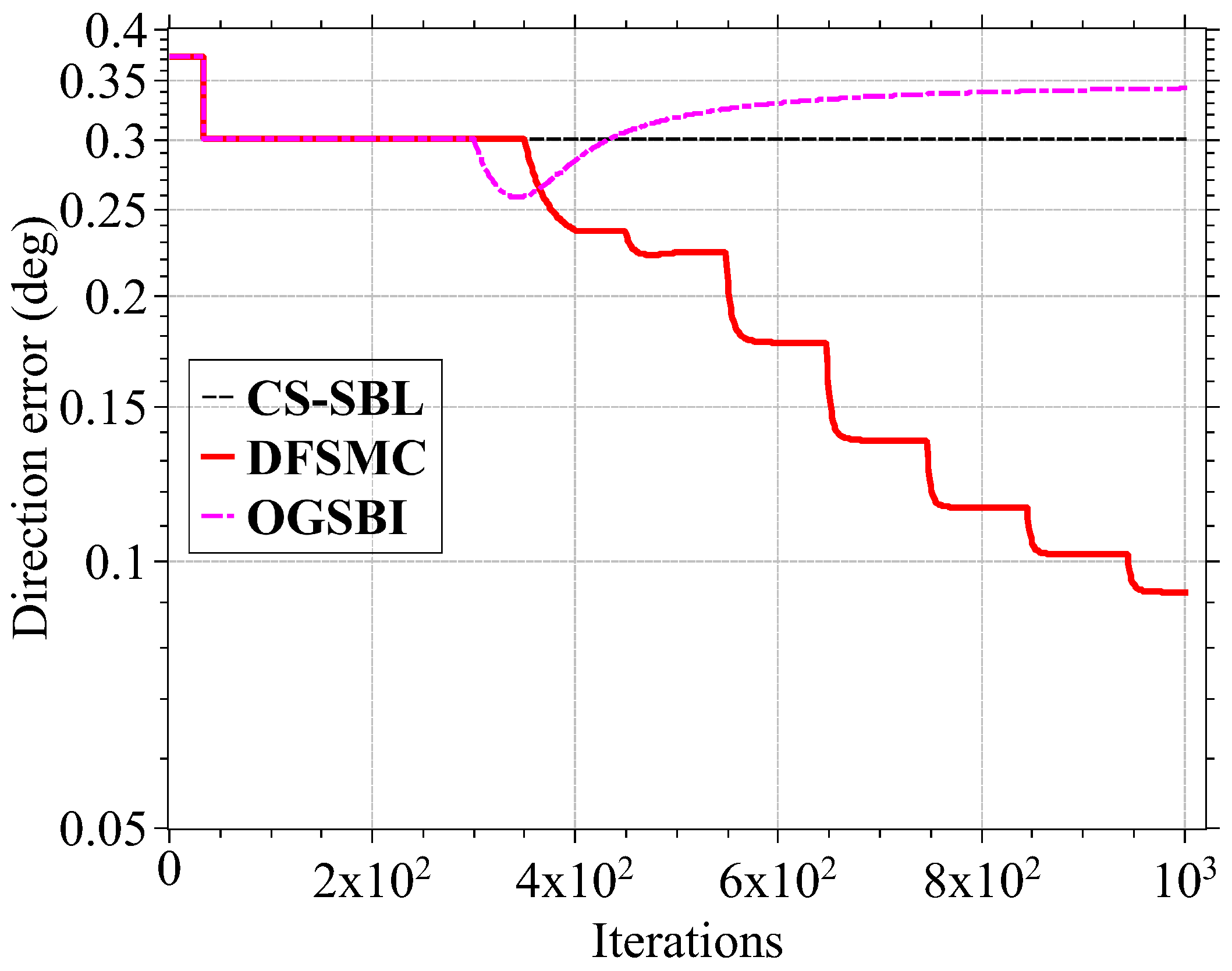
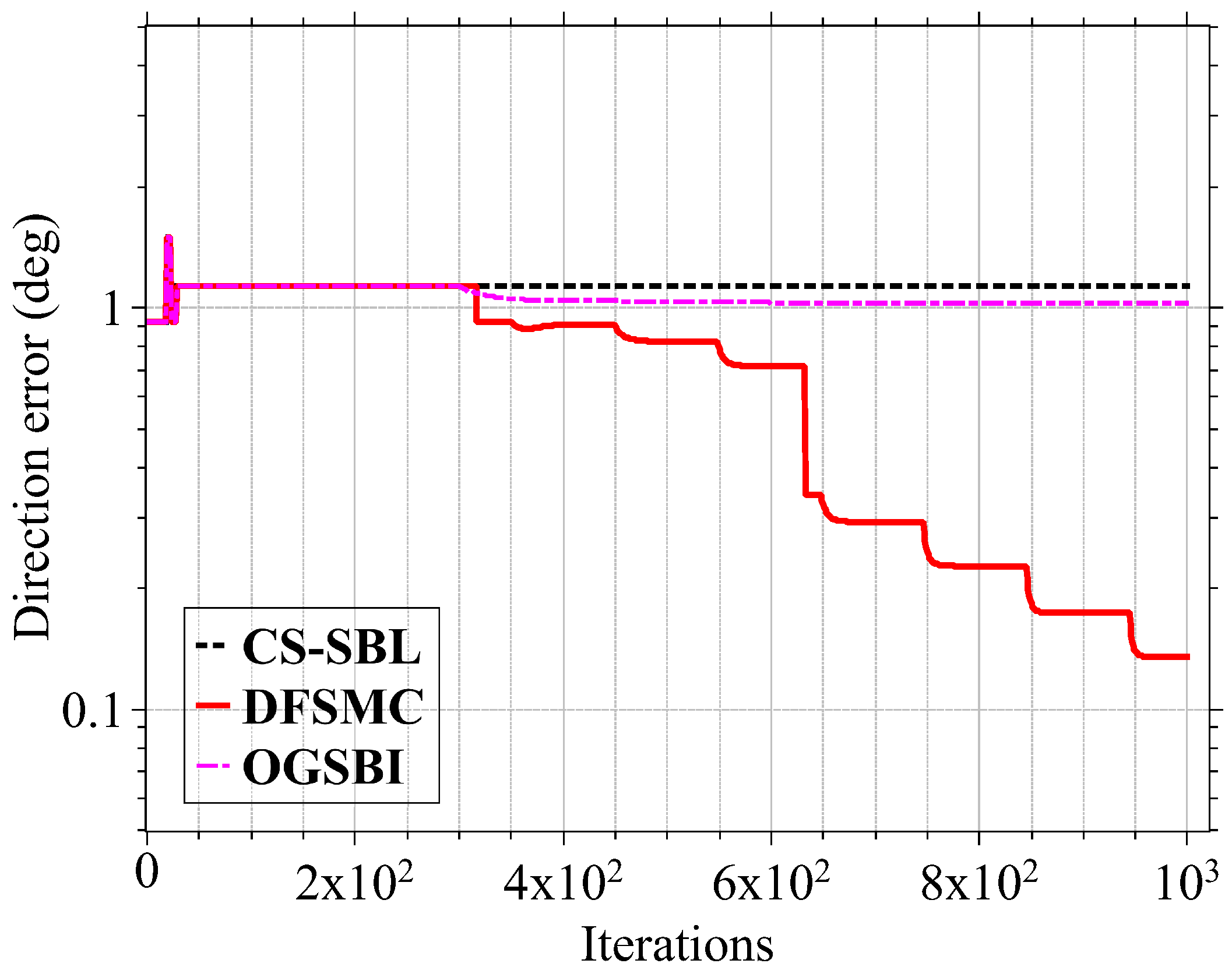
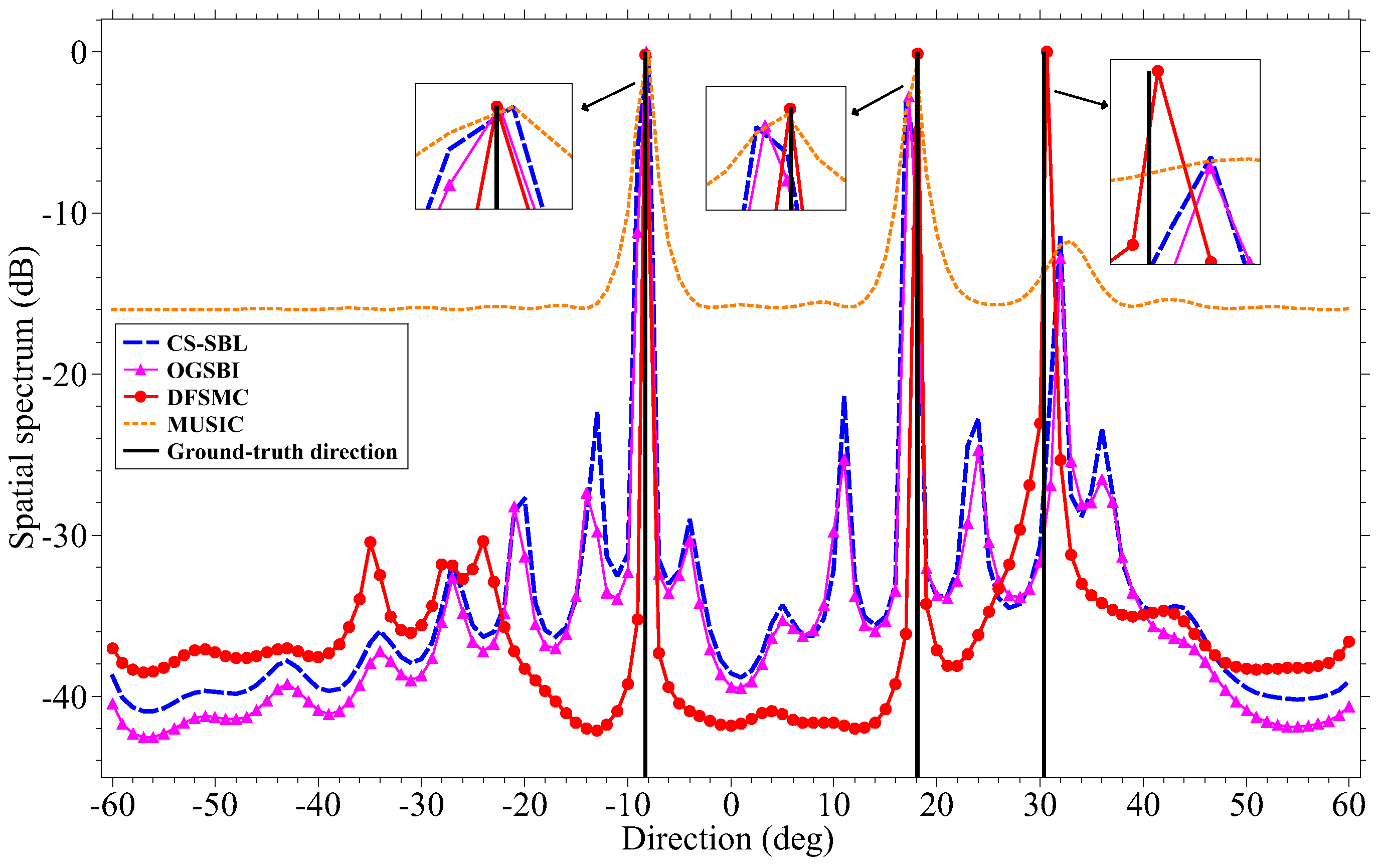
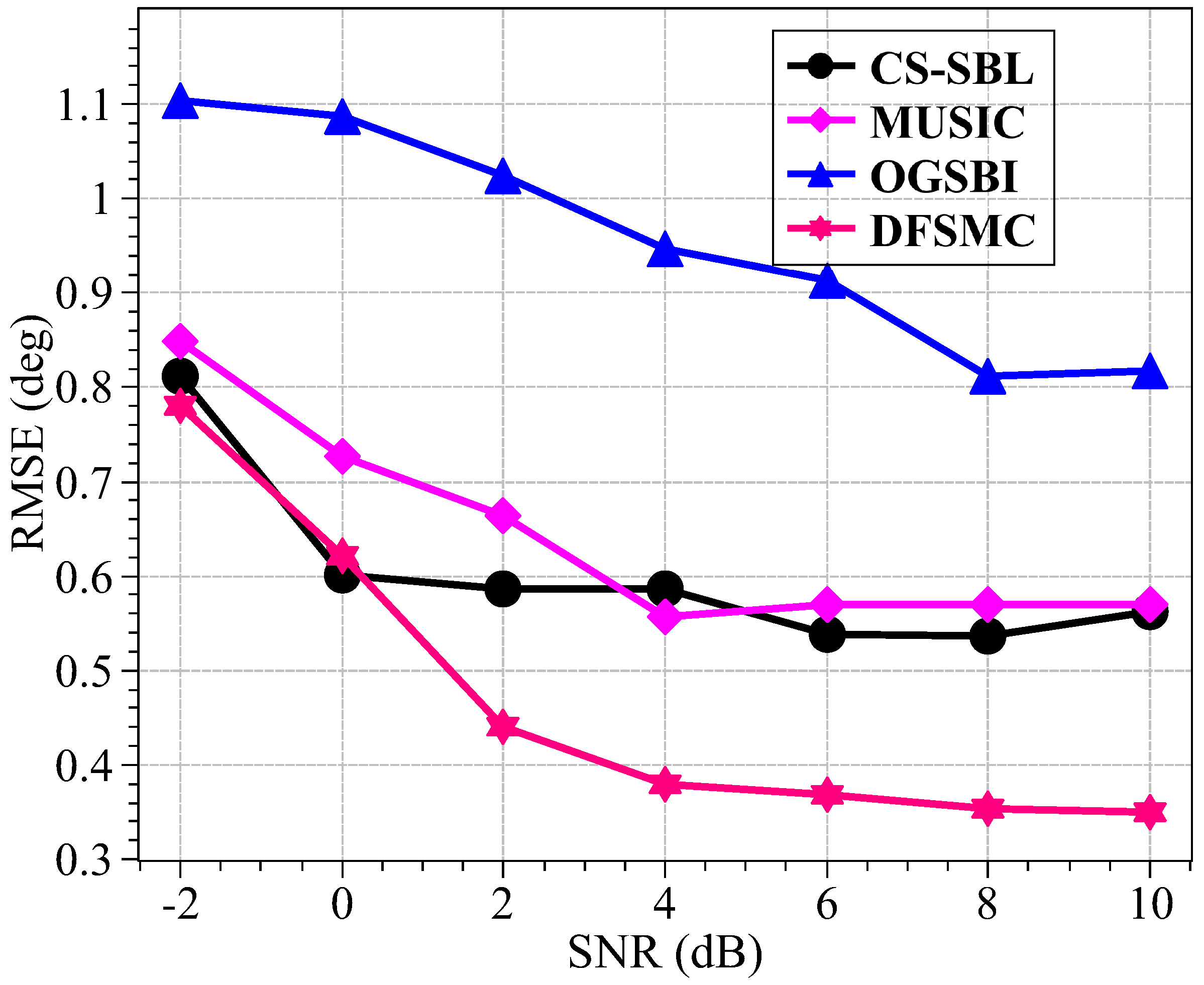
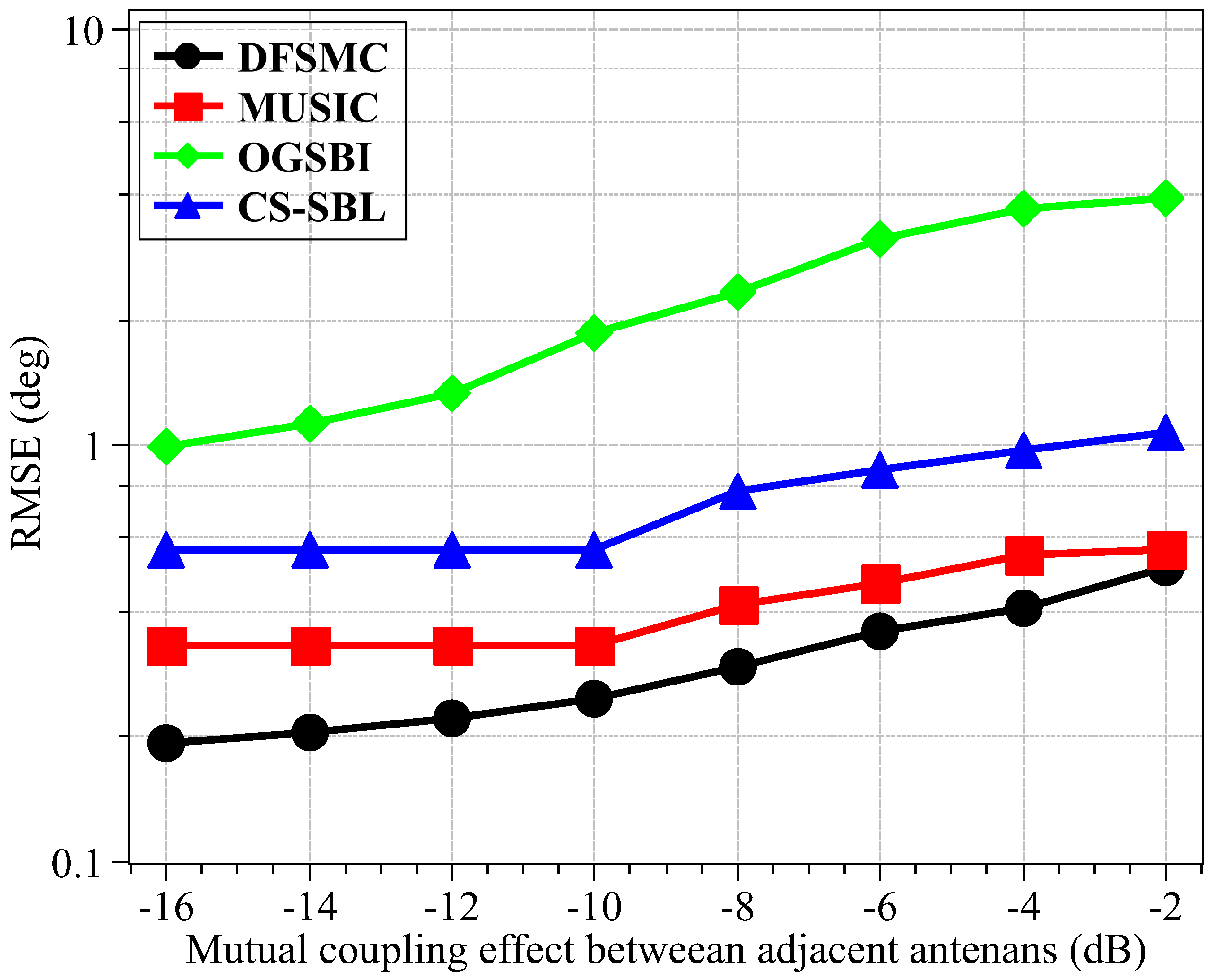
4. Simulation Results
- CS-SBL (The MATLAB code was downloaded at http://people.ee.duke.edu/~lcarin/BCS.html), the Bayesian compressive sensing method proposed in [16].
- OGSBI (The MATLAB code was downloaded at https://sites.google.com/site/zaiyang0248/publication), the off-grid sparse Bayesian inference method proposed in [19].
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of Lemma 1
References
- Schmidt, R.O. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef]
- Schmidt, R. A Signal Subspace Approach to Multiple Emitter Location Spectrum Estimation. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 1981. [Google Scholar]
- Zoltowski, M.; Kautz, G.; Silverstein, S. Beamspace Root-MUSIC. IEEE Trans. Signal Process. 1993, 41, 344–364. [Google Scholar] [CrossRef]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef]
- Pham, G.T.; Loubaton, P.; Vallet, P. Performance analysis of spatial smoothing schemes in the context of large arrays. IEEE Trans. Signal Process. 2016, 64, 160–172. [Google Scholar] [CrossRef]
- Chen, P.; Cao, Z.; Chen, Z.; Yu, C. Sparse DOD/DOA estimation in a bistatic MIMO radar with mutual coupling effect. Electronics 2018, 7, 341. [Google Scholar] [CrossRef]
- Carlin, M.; Rocca, P.; Oliveri, G.; Viani, F.; Massa, A. Directions-of-arrival estimation through Bayesian compressive sensing strategies. IEEE Trans. Antennas Propag. 2013, 61, 3828–3838. [Google Scholar] [CrossRef]
- Chen, P.; Qi, C.; Wu, L.; Wang, X. Estimation of Extended Targets Based on Compressed Sensing in Cognitive Radar System. IEEE Trans.Veh. Technol. 2017, 66, 941–951. [Google Scholar] [CrossRef]
- Yu, Y.; Petropulu, A.P.; Poor, H.V. Measurement matrix design for compressive sensing-based MIMO radar. IEEE Trans. Signal Process. 2011, 59, 5338–5352. [Google Scholar] [CrossRef]
- Carlin, M.; Rocca, P.; Oliveri, G.; Viani, F.; Massa, A. Novel wideband DOA estimation based on sparse Bayesian learning with dirichlet process priors. IEEE Trans. Signal Process. 2016, 64, 275–289. [Google Scholar]
- Chen, P.; Qi, C.; Wu, L. Antenna placement optimisation for compressed sensing-based distributed MIMO radar. IET Radar Sonar Navig. 2017, 11, 285–293. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L. Enhancing sparsity and resolution via reweighted atomic norm minimization. IEEE Trans. Signal Process. 2016, 64, 995–1006. [Google Scholar] [CrossRef]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S. Underdetermined DOA estimation under the compressive sensing framework: A review. IEEE Access 2016, 4, 8865–8878. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L. Exact joint sparse frequency recovery via optimization methods. IEEE Trans. Signal Process. 2016, 64, 5145–5157. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian Learning and the Relevance Vector Machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Ji, S.; Xue, Y.; Carin, L. Bayesian compressive sensing. IEEE Trans. Signal Process. 2008, 56, 2346–2356. [Google Scholar] [CrossRef]
- Wu, X.; Zhu, W.; Yan, J. Direction of arrival estimation for off-grid signals based on sparse Bayesian learning. IEEE Sens. J. 2016, 16, 2004–2016. [Google Scholar] [CrossRef]
- Chen, P.; Zheng, L.; Wang, X.; Li, H.; Wu, L. Moving target detection using colocated MIMO radar on multiple distributed moving platforms. IEEE Trans. Signal Process. 2017, 65, 4670–4683. [Google Scholar] [CrossRef]
- Yang, Z.; Lihua, X.; Cishen, Z. Off-grid direction of arrival estimation using sparse Bayesian inference. IEEE Trans. Signal Process. 2013, 61, 38–43. [Google Scholar] [CrossRef]
- Dai, J.; Bao, X.; Xu, W.; Chang, C. Root sparse Bayesian learning for off-grid DOA estimation. IEEE Signal Process. Lett. 2017, 24, 46–50. [Google Scholar] [CrossRef]
- Wang, Q.; Zhao, Z.; Chen, Z.; Nie, Z. Grid evolution method for DOA estimation. IEEE Trans. Signal Process. 2018, 66, 2374–2383. [Google Scholar] [CrossRef]
- Zamani, H.; Zayyani, H.; Marvasti, F. An iterative dictionary learning-based algorithm for DOA estimation. IEEE Commun. Lett. 2016, 20, 1784–1787. [Google Scholar] [CrossRef]
- Clerckx, B.; Craeye, C.; Vanhoenacker-Janvier, D.; Oestges, C. Impact of Antenna Coupling on 2 × 2 MIMO Communications. IEEE Trans. Veh. Technol. 2007, 56, 1009–1018. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhang, J.; Zhang, J. Joint DOD and DOA estimation of bistatic MIMO radar in the presence of unknown mutual coupling. Signal Process. 2012, 92, 3039–3048. [Google Scholar] [CrossRef]
- Rocca, P.; Hannan, M.A.; Salucci, M.; Massa, A. Single-snapshot DoA estimation in array antennas with mutual coupling through a multiscaling BCS strategy. IEEE Trans. Antennas Propag. 2017, 65, 3203–3213. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Lu, Y.; Ren, S.; Cao, S. Augmented nested arrays with enhanced DOF and reduced mutual coupling. IEEE Trans. Signal Process. 2017, 65, 5549–5563. [Google Scholar] [CrossRef]
- Hawes, M.; Mihaylova, L.; Septer, F.; Godsill, S. Bayesian compressive sensing approaches for direction of arrival estimation with mutual coupling effects. IEEE Trans. Antennas Propag. 2017, 65, 1357–1367. [Google Scholar] [CrossRef]
- Basikolo, T.; Ichige, K.; Arai, H. A novel mutual coupling compensation method for underdetermined direction of arrival estimation in nested sparse circular arrays. IEEE Trans. Antennas Propag. 2018, 66, 909–917. [Google Scholar] [CrossRef]
- Zhang, C.; Huang, H.; Liao, B. Direction finding in MIMO radar with unknown mutual coupling. IEEE Access 2017, 5, 4439–4447. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, Z.G.; Chan, S.C. DOA estimation and tracking of ULAs with mutual coupling. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 891–905. [Google Scholar] [CrossRef]
- Termos, A.; Hochwald, B.M. Capacity benefits of antenna coupling. In Proceedings of the 2016 Information Theory and Applications (ITA), La Jolla, CA, USA, 31 January–5 February 2016; pp. 1–5. [Google Scholar]
- Liu, X.; Liao, G. Direction finding and mutual coupling estimation for bistatic MIMO radar. Signal Process 2012, 92, 517–522. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The signal-to-noise ratio (SNR) | 20 dB |
| The number of samples M | 100 |
| The number of antennas N | 20 |
| The number of signals K | 3 |
| The space between antennas d | 0.5 wavelength |
| The grid space | 1° |
| The direction range | [−60° 60°] |
| The hyperparameters | |
| in Algorithm 1 | |
| in Algorithm 1 | |
| in Algorithm 1 |
| Methods | Signal 1 | Signal 2 | Signal 3 |
|---|---|---|---|
| Ground-truth directions | −8.268° | 18.128° | 30.428° |
| OGSBI | −8.267° | 17.69° | 30.02° |
| CS-SBL | −8° | 18° | 30° |
| MUSIC | −8° | 18° | 30° |
| DFSMC | −8.254° | 18.13° | 30.27° |
| Methods | Signal 1 | Signal 2 | Signal 3 |
|---|---|---|---|
| Ground-truth direction | −8.268° | 18.128° | 30.428° |
| OGSBI | −8.222° | 17.29° | 31.99° |
| CS-SBL | −8° | 17° | 32° |
| MUSIC | −8° | 18° | 33° |
| DFSMC | −8.260° | 18.11° | 30.66° |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Chen, Z.; Zhang, X.; Liu, L. SBL-Based Direction Finding Method with Imperfect Array. Electronics 2018, 7, 426. https://doi.org/10.3390/electronics7120426
Chen P, Chen Z, Zhang X, Liu L. SBL-Based Direction Finding Method with Imperfect Array. Electronics. 2018; 7(12):426. https://doi.org/10.3390/electronics7120426
Chicago/Turabian StyleChen, Peng, Zhimin Chen, Xuan Zhang, and Linxi Liu. 2018. "SBL-Based Direction Finding Method with Imperfect Array" Electronics 7, no. 12: 426. https://doi.org/10.3390/electronics7120426
APA StyleChen, P., Chen, Z., Zhang, X., & Liu, L. (2018). SBL-Based Direction Finding Method with Imperfect Array. Electronics, 7(12), 426. https://doi.org/10.3390/electronics7120426