MWCNT–Epoxy Nanocomposite Sensors for Structural Health Monitoring

 ,
,  , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
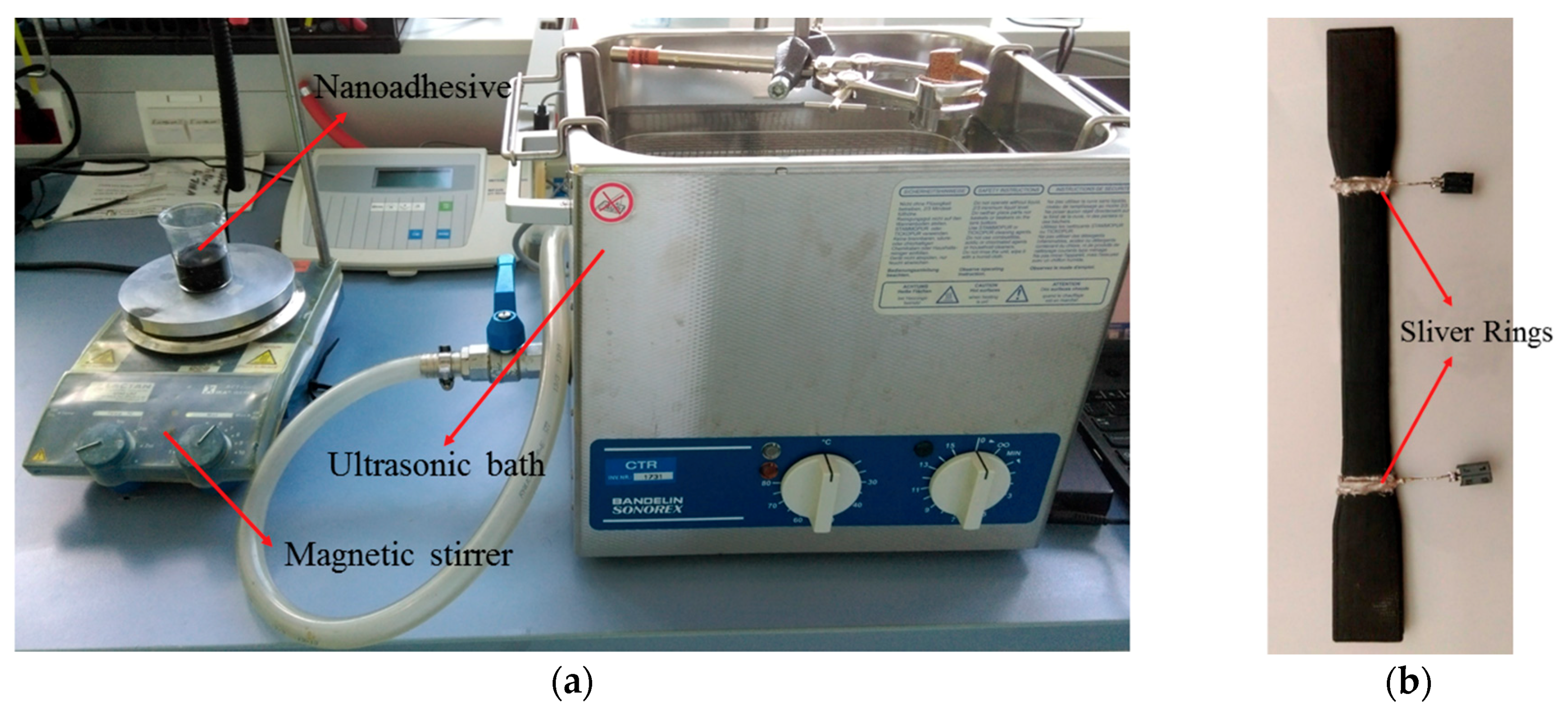
2.2. Preparation of Specimens
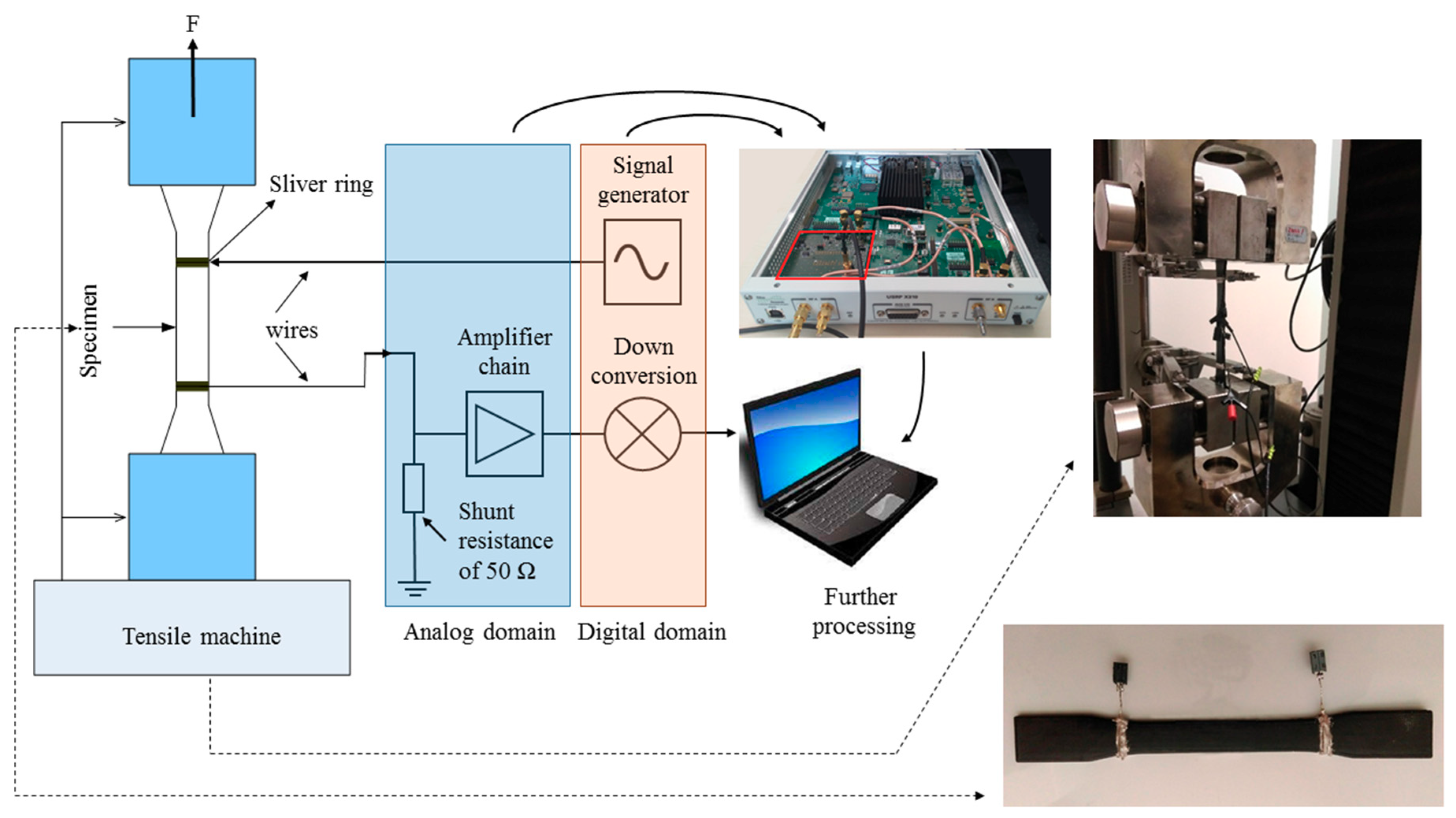
2.3. Mechanical and Electrical Acquisition System
3. Results and Discussions
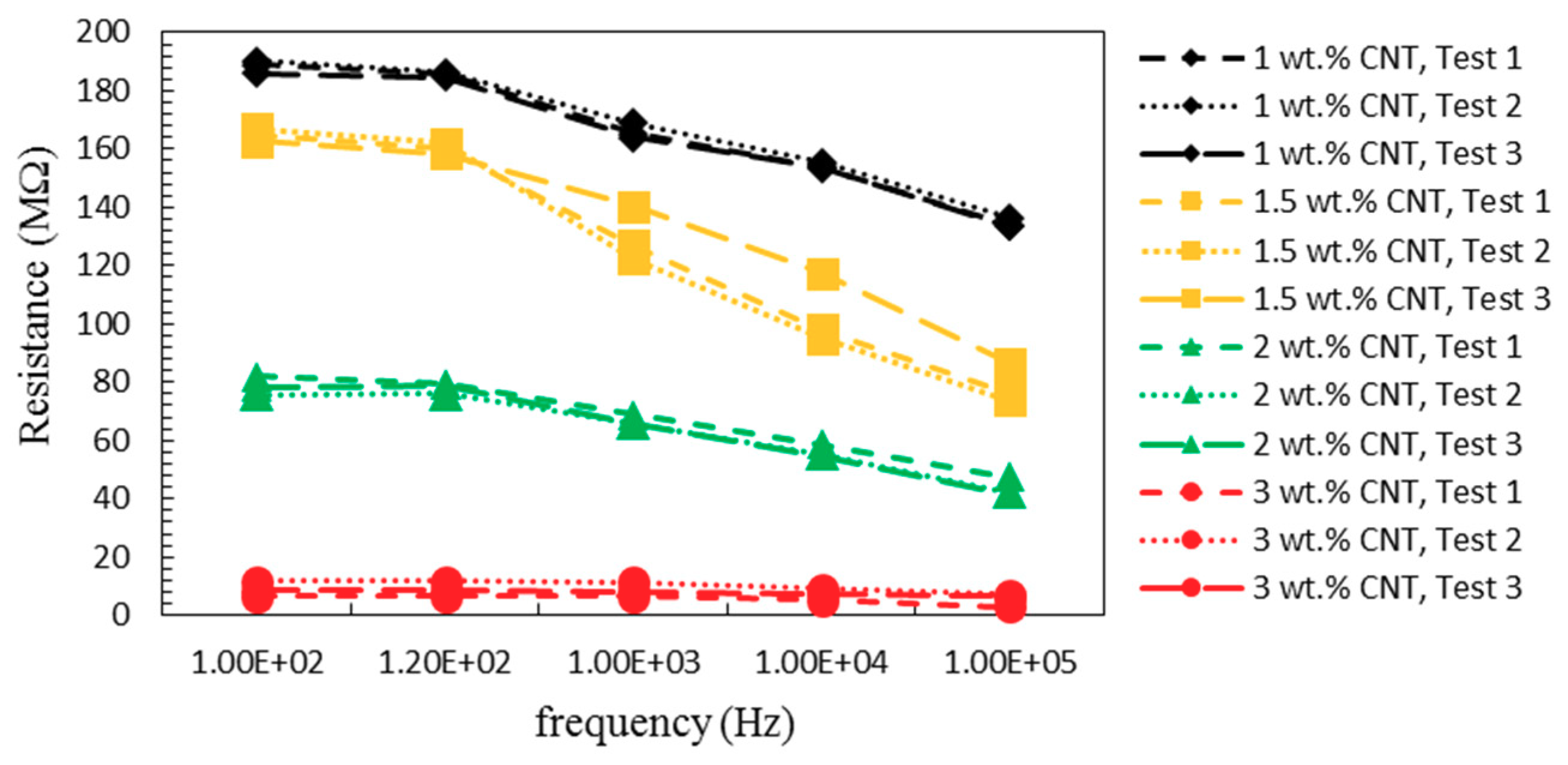
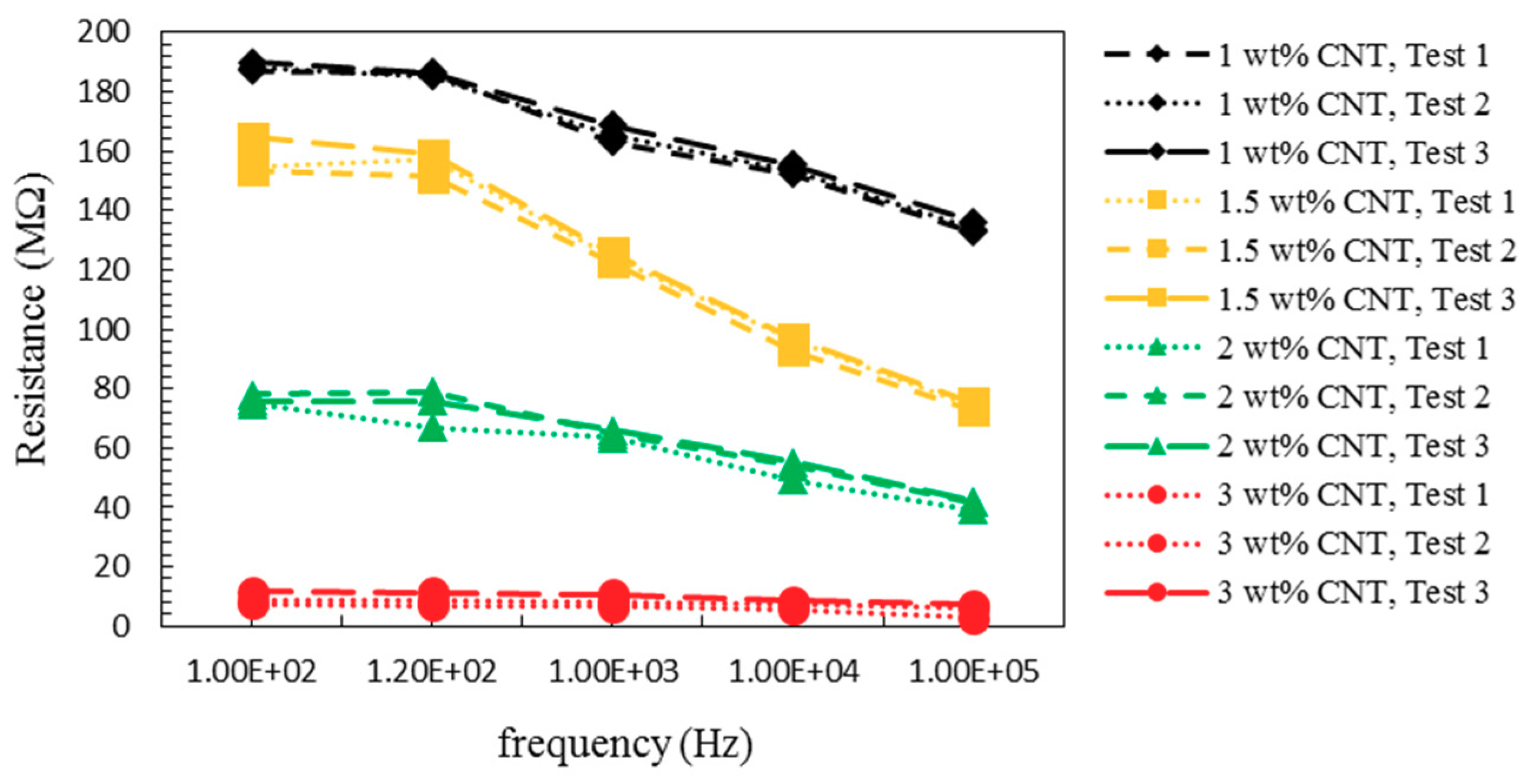
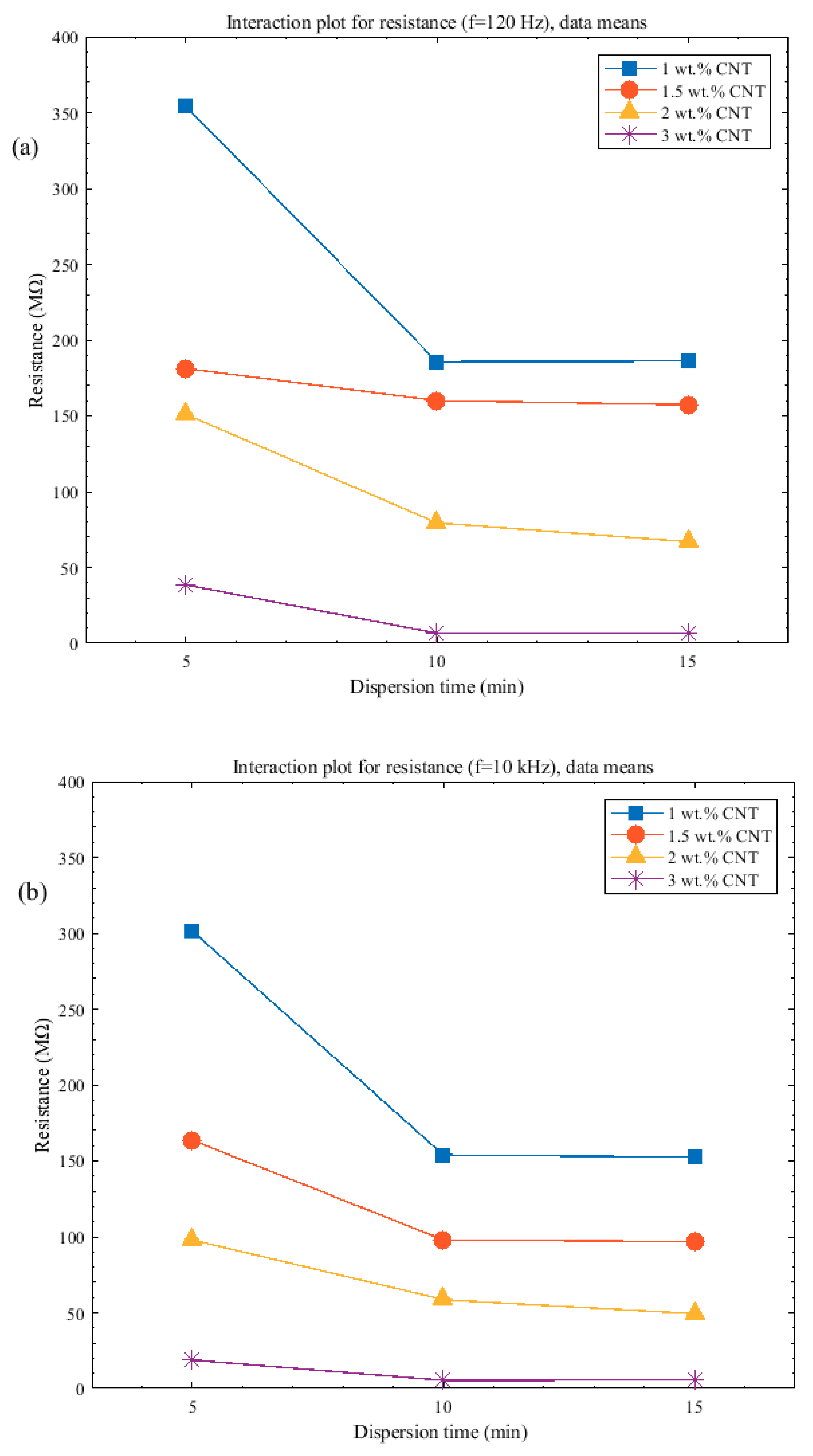
3.1. Achieved Impedance Without Mechanical Loading
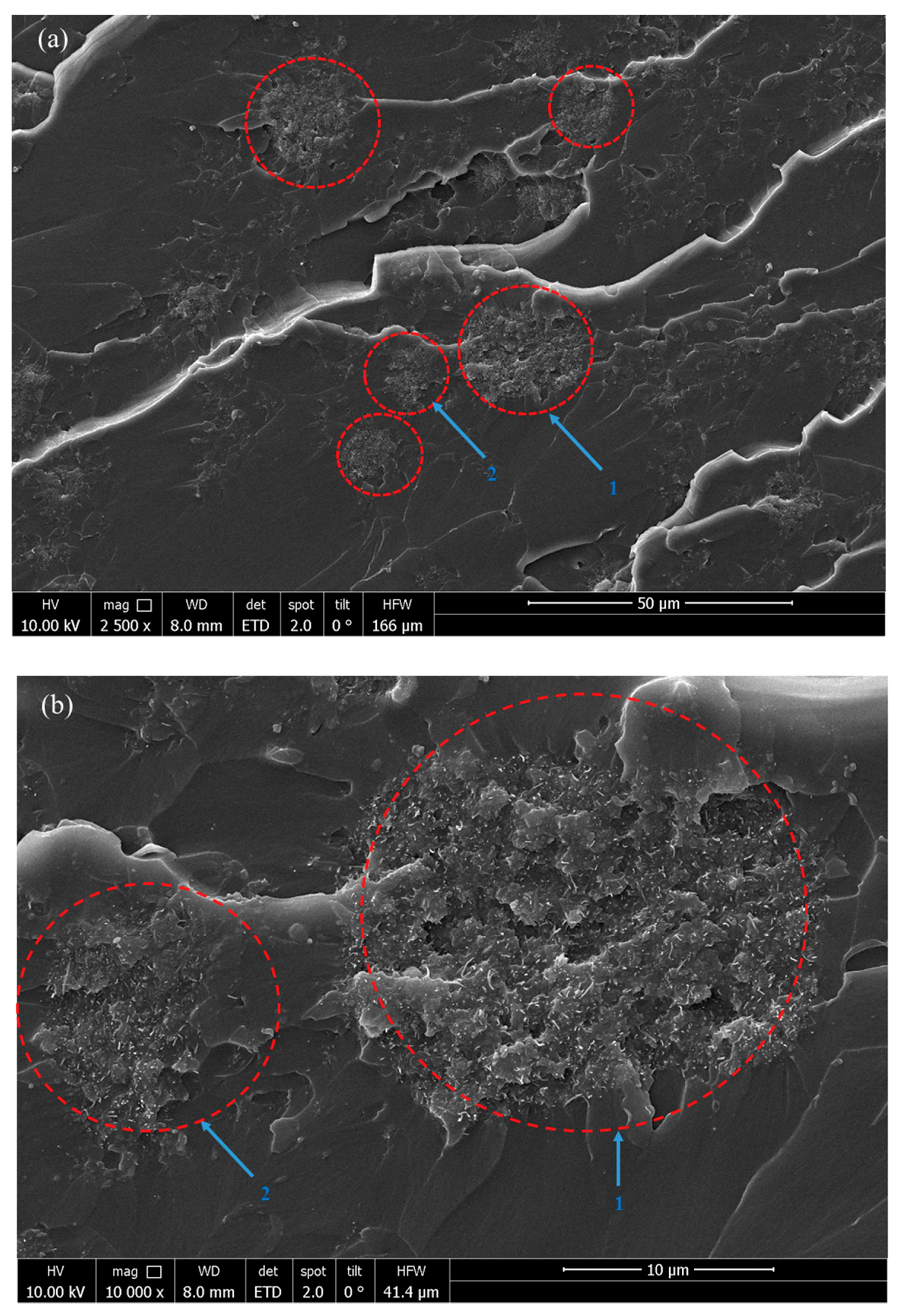
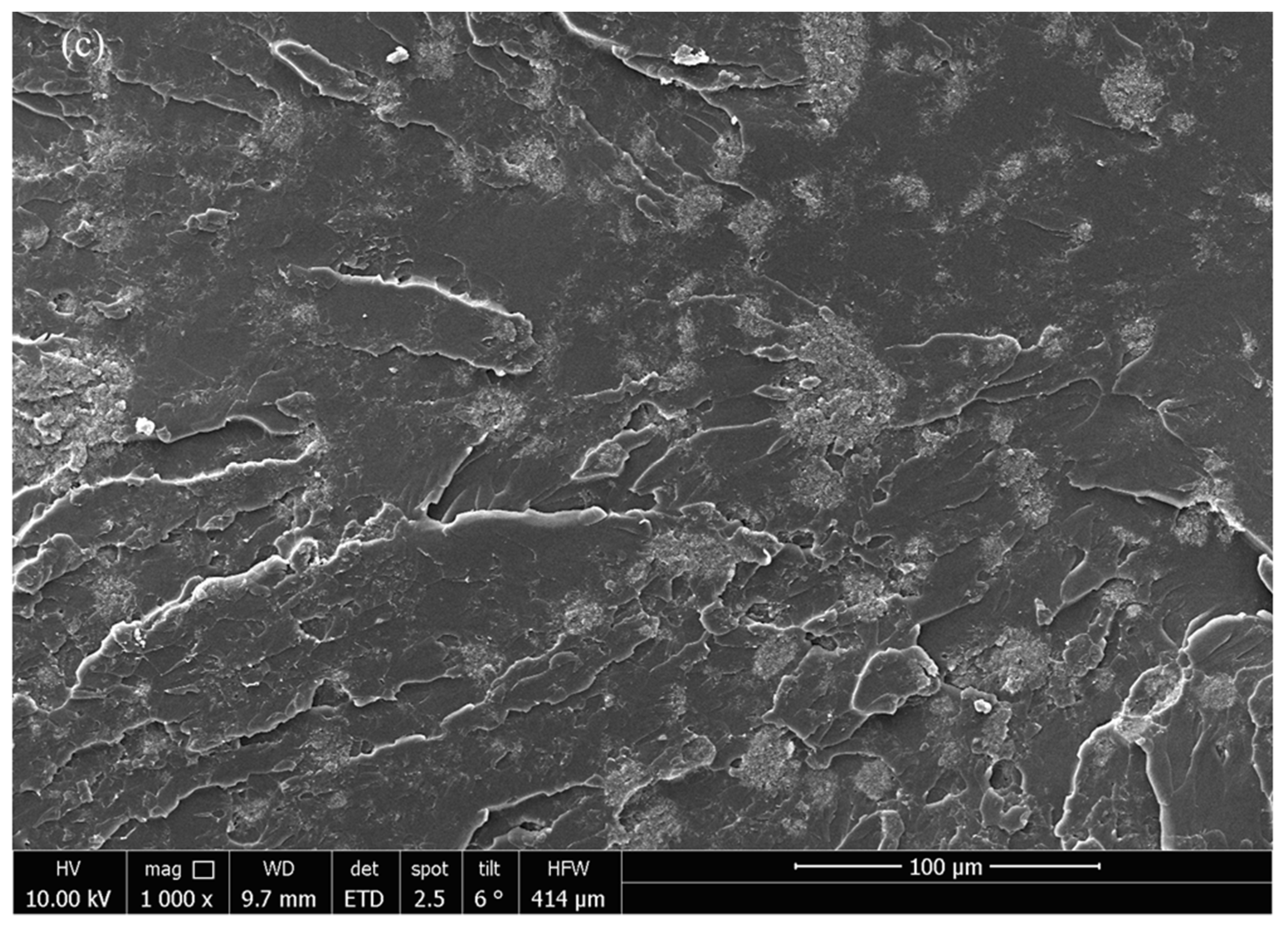
3.2. Morphology
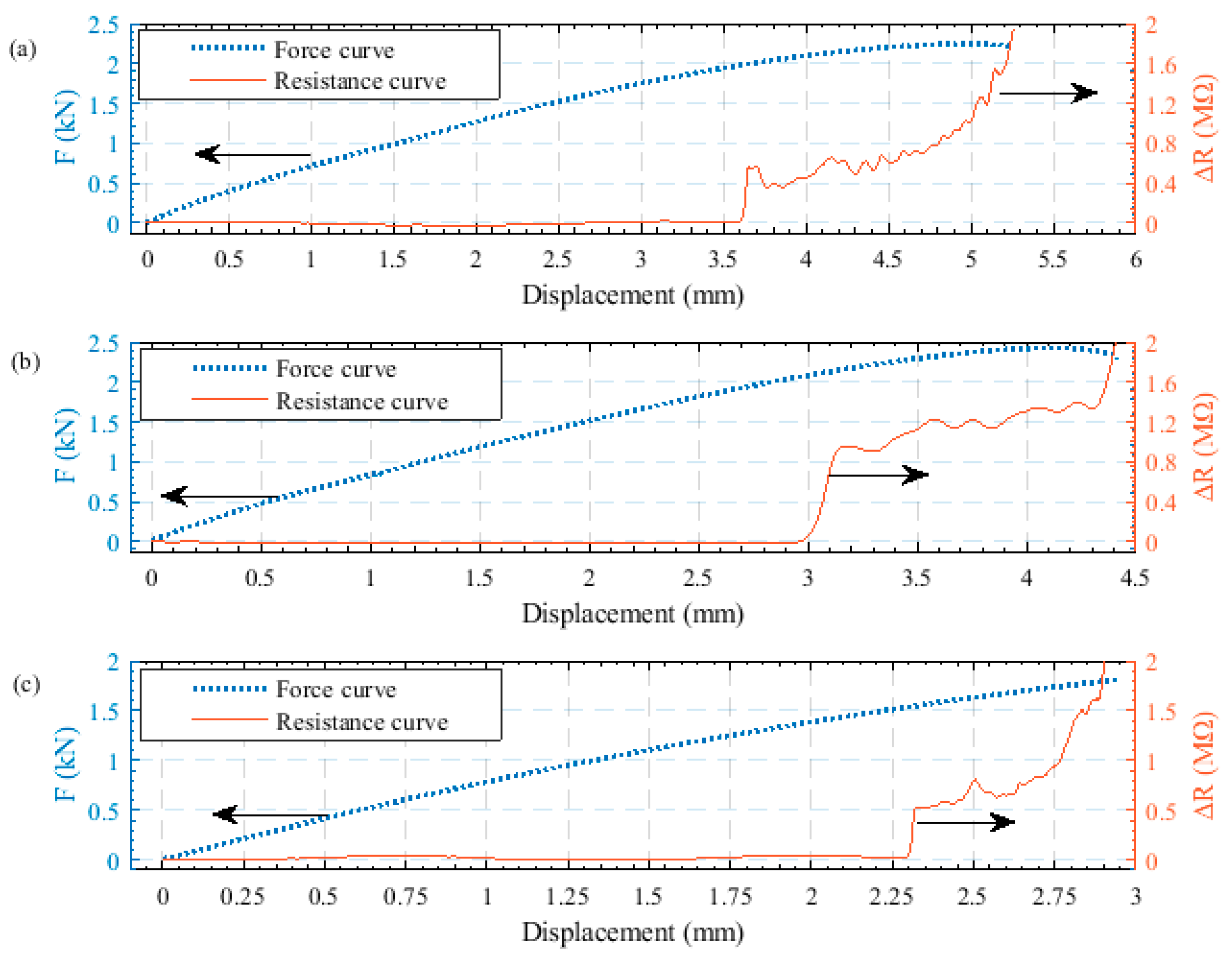
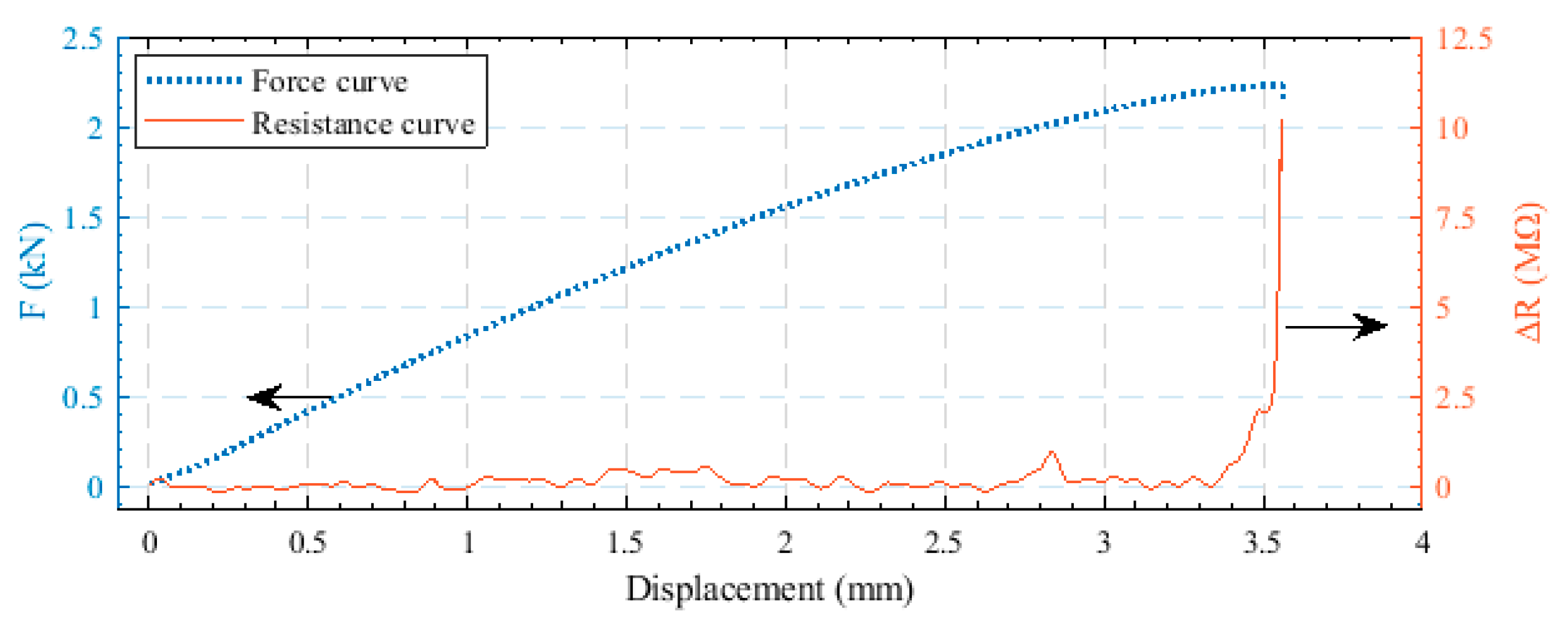
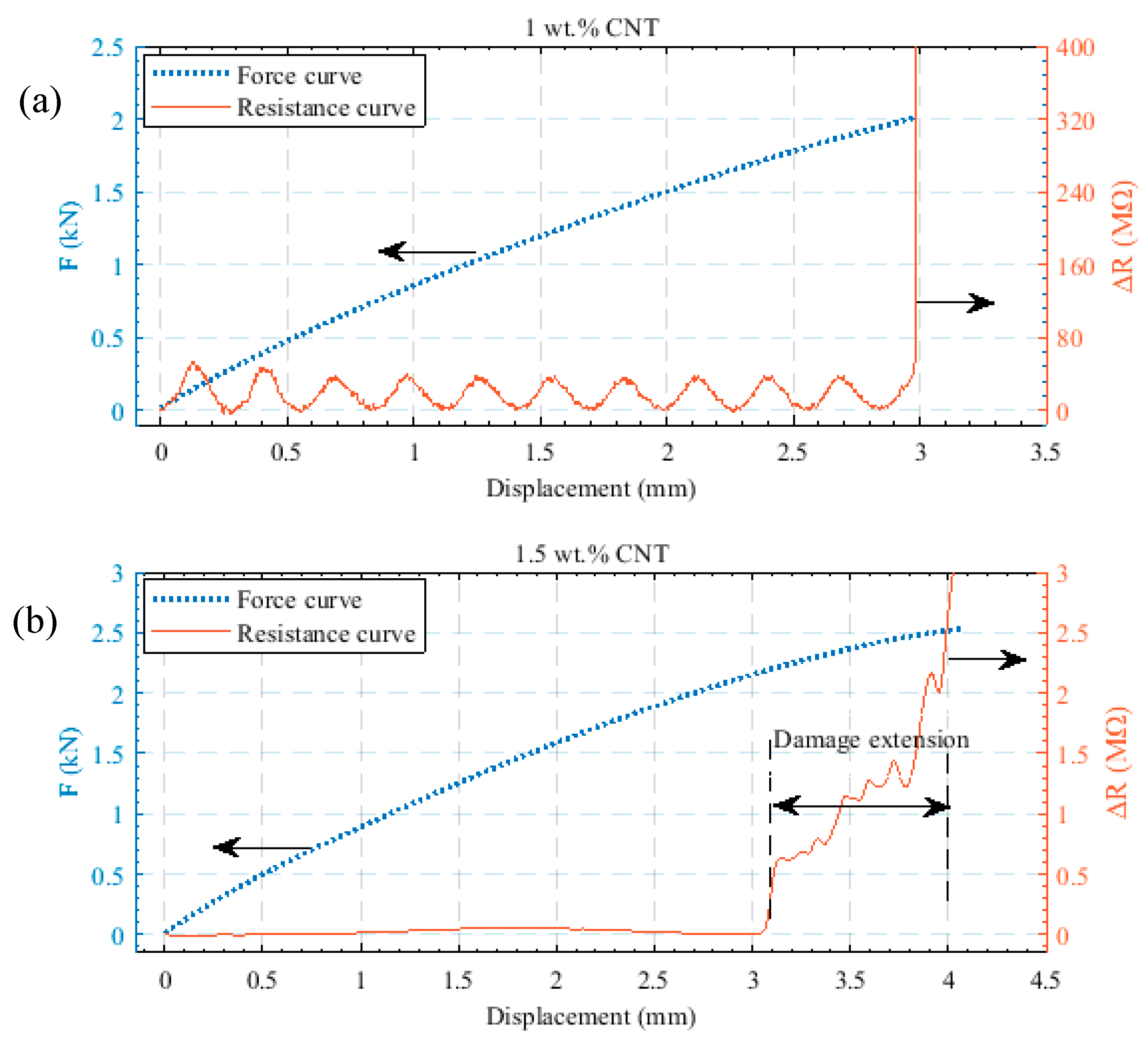
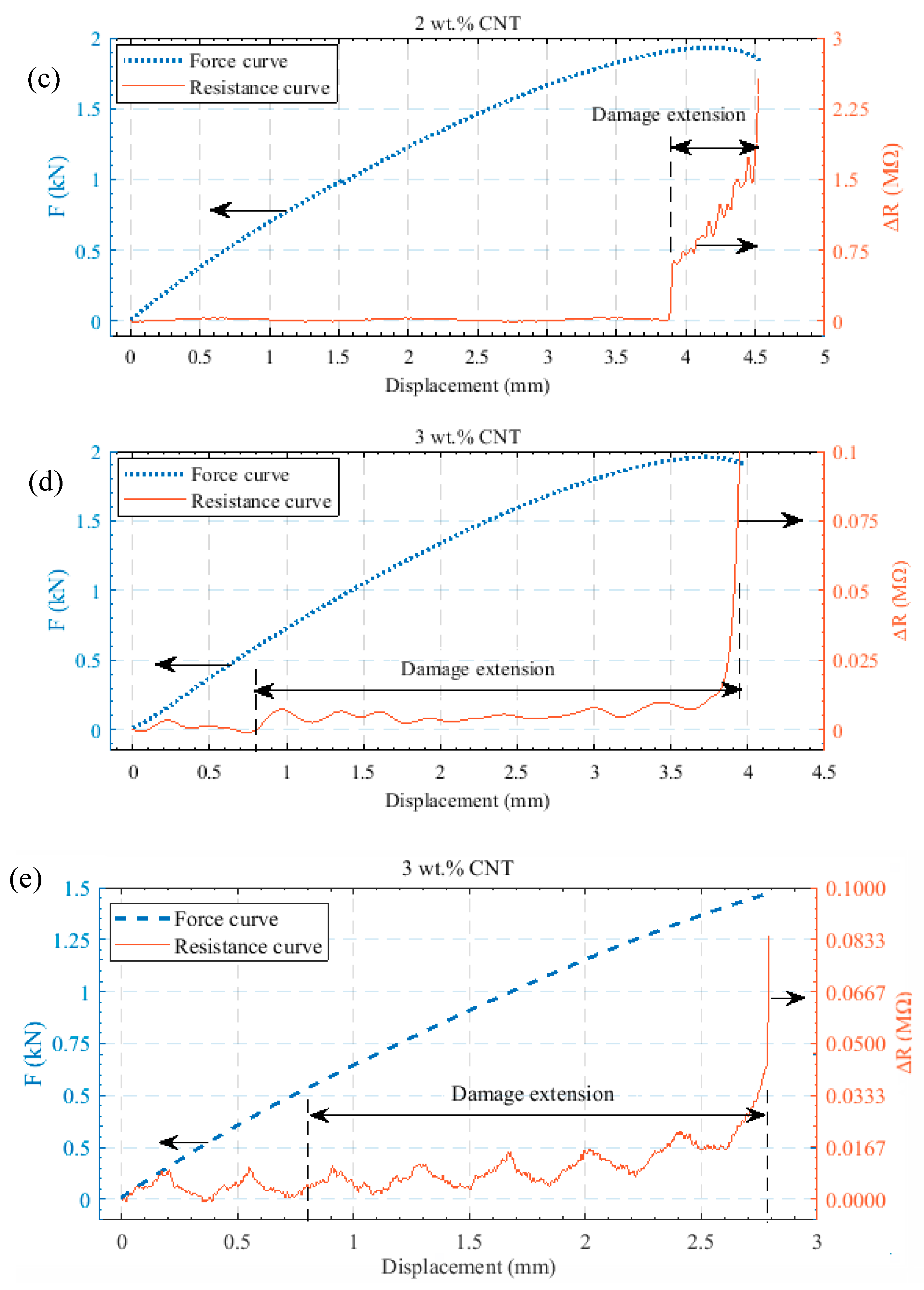
3.3. Sensing Capabilities during Mechanical Loading
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lu, J.; Chen, X.; Lu, W.; Chen, G. The piezoresistive behaviors of polyethylene/foliated graphite nanocomposites. Eur. Polym. J. 2006, 42, 1015–1021. [Google Scholar] [CrossRef]
- Le, J.-L.; Du, H.; Dai Pang, S. Use of 2d graphene nanoplatelets (gnp) in cement composites for structural health evaluation. Compos. Part B 2014, 67, 555–563. [Google Scholar] [CrossRef]
- Thostenson, E.T.; Chou, T.-W. Aligned multi-walled carbon nanotube-reinforced composites: Processing and mechanical characterization. J. Phys. D Appl. Phys. 2002, 35, L77–L80. [Google Scholar] [CrossRef]
- Suhr, J.; Koratkar, N.; Keblinski, P.; Ajayan, P. Viscoelasticity in carbon nanotube composites. Nat. Mater. 2005, 4, 134–137. [Google Scholar] [CrossRef] [PubMed]
- Cha, J.; Jun, G.H.; Park, J.K.; Kim, J.C.; Ryu, H.J.; Hong, S.H. Improvement of modulus, strength and fracture toughness of cnt/epoxy nanocomposites through the functionalization of carbon nanotubes. Compos. Part B 2017, 129, 169–179. [Google Scholar] [CrossRef]
- Wang, L.; Dang, Z.-M. Carbon nanotube composites with high dielectric constant at low percolation threshold. Appl. Phys. Lett. 2005, 87, 042903. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Zhang, H.; Fan, X.; Zhou, L.; Shang, Z.; Shi, X. Electrical conductivity and electromagnetic interference shielding of epoxy nanocomposite foams containing functionalized multi-wall carbon nanotubes. Appl. Surf. Sci. 2018, 428, 7–16. [Google Scholar] [CrossRef]
- Guadagno, L.; Raimondo, M.; Vertuccio, L.; Naddeo, C.; Barra, G.; Longo, P.; Lamberti, P.; Spinelli, G.; Nobile, M. Morphological, rheological and electrical properties of composites filled with carbon nanotubes functionalized with 1-pyrenebutyric acid. Compos. Part B 2018, 147, 12–21. [Google Scholar] [CrossRef]
- Gardea, F.; Lagoudas, D.C. Characterization of electrical and thermal properties of carbon nanotube/epoxy composites. Compos. Part B 2014, 56, 611–620. [Google Scholar] [CrossRef]
- Krainoi, A.; Kummerlöwe, C.; Nakaramontri, Y.; Vennemann, N.; Pichaiyut, S.; Wisunthorn, S.; Nakason, C. Influence of critical carbon nanotube loading on mechanical and electrical properties of epoxidized natural rubber nanocomposites. Polym. Test. 2018, 66, 122–136. [Google Scholar] [CrossRef]
- Galvez, P.; Quesada, A.; Martinez, M.A.; Abenojar, J.; Boada, M.J.L.; Diaz, V. Study of the behaviour of adhesive joints of steel with cfrp for its application in bus structures. Compos. Part B 2017, 129, 41–46. [Google Scholar] [CrossRef]
- Vajtai, R.; Wei, B.; Zhang, Z.; Jung, Y.; Ramanath, G.; Ajayan, P. Building carbon nanotubes and their smart architectures. Smart Mater. Struct. 2002, 11, 691–698. [Google Scholar] [CrossRef]
- Koo, Y.; Shanov, V.N.; Yun, Y. Carbon nanotube paper-based electroanalytical devices. Micromachines 2016, 7, 72. [Google Scholar] [CrossRef]
- Lee, J.; Lim, S.-H. CNT foam-embedded micro gas pre-concentrator for low-concentration ethane measurements. Sensors 2018, 18, 1547. [Google Scholar] [CrossRef] [PubMed]
- Avilés, F.; May-Pat, A.; López-Manchado, M.; Verdejo, R.; Bachmatiuk, A.; Rümmeli, M. A comparative study on the mechanical, electrical and piezoresistive properties of polymer composites using carbon nanostructures of different topology. Eur. Polym. J. 2018, 99, 394–402. [Google Scholar] [CrossRef] [Green Version]
- Nofar, M.; Hoa, S.; Pugh, M. Failure detection and monitoring in polymer matrix composites subjected to static and dynamic loads using carbon nanotube networks. Compos. Sci. Technol. 2009, 69, 1599–1606. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Li, M.; Gu, Y.; Zhang, Z. Piezoresistive response of carbon nanotube composite film under laterally compressive strain. Sens. Actuators A 2018, 273, 140–146. [Google Scholar] [CrossRef]
- Kim, H.; Kim, Y. High performance flexible piezoelectric pressure sensor based on cnts-doped 0–3 ceramic-epoxy nanocomposites. Mater. Des. 2018, 151, 133–140. [Google Scholar] [CrossRef]
- Hu, N.; Fukunaga, H.; Atobe, S.; Liu, Y.; Li, J. Piezoresistive strain sensors made from carbon nanotubes based polymer nanocomposites. Sensors 2011, 11, 10691–10723. [Google Scholar]
- Prudencio, E.; Bauman, P.; Williams, S.; Faghihi, D.; Ravi-Chandar, K.; Oden, J. Real-time inference of stochastic damage in composite materials. Compos. Part B 2014, 67, 209–219. [Google Scholar] [CrossRef]
- Kwon, D.-J.; Wang, Z.-J.; Choi, J.-Y.; Shin, P.-S.; DeVries, K.L.; Park, J.-M. Damage sensing and fracture detection of cnt paste using electrical resistance measurements. Compos. Part B 2016, 90, 386–391. [Google Scholar] [CrossRef]
- Mishra, S.; Kumaran, K.; Sivakumaran, R.; Pandian, S.P.; Kundu, S. Synthesis of PVDF/CNT and their functionalized composites for studying their electrical properties to analyze their applicability in actuation & sensing. Colloids Surf. A 2016, 509, 684–696. [Google Scholar]
- Na, W.-J.; Byun, J.-H.; Lee, M.-G.; Yu, W.-R. In-situ damage sensing of woven composites using carbon nanotube conductive networks. Compos. Part A 2015, 77, 229–236. [Google Scholar] [CrossRef]
- Li, C.; Thostenson, E.T.; Chou, T.-W. Sensors and actuators based on carbon nanotubes and their composites: A review. Compos. Sci. Technol. 2008, 68, 1227–1249. [Google Scholar] [CrossRef]
- Lee, B.M.; Gupta, S.; Loh, K.J.; Nagarajaiah, S. Strain sensing and structural health monitoring using nanofilms and nanocomposites. In Innovative Developments of Advanced Multifunctional Nanocomposites in Civil and Structural Engineering; Loh, K., Nagarajaiah, S., Eds.; Elsevier: Cambridge, UK, 2016; pp. 303–326. [Google Scholar]
- Kang, I.; Schulz, M.J.; Kim, J.H.; Shanov, V.; Shi, D. A carbon nanotube strain sensor for structural health monitoring. Smart Mater. Struct. 2006, 15, 737–748. [Google Scholar] [CrossRef]
- Meeuw, H.; Viets, C.; Liebig, W.; Schulte, K.; Fiedler, B. Morphological influence of carbon nanofillers on the piezoresistive response of carbon nanoparticle/epoxy composites under mechanical load. Eur. Polym. J. 2016, 85, 198–210. [Google Scholar] [CrossRef]
- Alig, I.; Pötschke, P.; Lellinger, D.; Skipa, T.; Pegel, S.; Kasaliwal, G.R.; Villmow, T. Establishment, morphology and properties of carbon nanotube networks in polymer melts. Polymer 2012, 53, 4–28. [Google Scholar] [CrossRef]
- Pal, G.; Kumar, S. Multiscale modeling of effective electrical conductivity of short carbon fiber-carbon nanotube-polymer matrix hybrid composites. Mater. Des. 2016, 89, 129–136. [Google Scholar] [CrossRef]
- Zangl, H.; Muehlbacher-Karrer, S.; Hamid, R. Interfaces for autarkic wireless sensors and actuators in the internet of things. In Advanced Interfacing Techniques for Sensors; Springer: New York, NY, USA, 2017; pp. 167–189. [Google Scholar]
- Zangl, H.; Zine-Zine, M.; Mühlbacher-Karrer, S. Teds extensions toward energy management of wireless transducers. IEEE Sens. J. 2015, 15, 2587–2594. [Google Scholar] [CrossRef]
- Seyhan, A.T.; Tanoğlu, M.; Schulte, K. Tensile mechanical behavior and fracture toughness of MWCNT and DWCNT modified vinyl-ester/polyester hybrid nanocomposites produced by 3-roll milling. Mater. Sci. Eng. A 2009, 523, 85–92. [Google Scholar] [CrossRef] [Green Version]
- Kueseng, P.; Sae-oui, P.; Rattanasom, N. Mechanical and electrical properties of natural rubber and nitrile rubber blends filled with multi-wall carbon nanotube: Effect of preparation methods. Polym. Test. 2013, 32, 731–738. [Google Scholar] [CrossRef]
- Faller, L.-M.; Mitterer, T.; Leitzke, J.P.; Zangl, H. Design and evaluation of a fast, high-resolution sensor evaluation platform applied to mems position sensing. IEEE Trans. Instrum. Meas. 2017, 67, 1014–1027. [Google Scholar] [CrossRef]
- Faller, L.-M.; Leitzke, J.; Zangl, H. Design of a fast, high-resolution sensor evaluation platform applied to a capacitive position sensor for a micromirror. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Georgousis, G.; Pandis, C.; Kalamiotis, A.; Georgiopoulos, P.; Kyritsis, A.; Kontou, E.; Pissis, P.; Micusik, M.; Czanikova, K.; Kulicek, J. Strain sensing in polymer/carbon nanotube composites by electrical resistance measurement. Compos. Part B 2015, 68, 162–169. [Google Scholar] [CrossRef]
- Pircheraghi, G.; Powell, T.; Solouki Bonab, V.; Manas-Zloczower, I. Effect of carbon nanotube dispersion and network formation on thermal conductivity of thermoplastic polyurethane/carbon nanotube nanocomposites. Polym. Eng. Sci. 2016, 56, 394–407. [Google Scholar] [CrossRef]
- Ferrreira, A.; Rocha, J.; Ansón-Casaos, A.; Martínez, M.; Vaz, F.; Lanceros-Mendez, S. Electromechanical performance of poly (vinylidene fluoride)/carbon nanotube composites for strain sensor applications. Sens. Actuators A 2012, 178, 10–16. [Google Scholar] [CrossRef]
- Ku-Herrera, J.; Aviles, F. Cyclic tension and compression piezoresistivity of carbon nanotube/vinyl ester composites in the elastic and plastic regimes. Carbon 2012, 50, 2592–2598. [Google Scholar] [CrossRef]
- Grammatikos, S.; Paipetis, A. On the electrical properties of multi scale reinforced composites for damage accumulation monitoring. Compos. Part B 2012, 43, 2687–2696. [Google Scholar] [CrossRef]
- Lim, A.S.; An, Q.; Chou, T.-W.; Thostenson, E.T. Mechanical and electrical response of carbon nanotube-based fabric composites to hopkinson bar loading. Compos. Sci. Technol. 2011, 71, 616–621. [Google Scholar] [CrossRef]
- Yu, S.; Tong, M.N.; Critchlow, G. Wedge test of carbon-nanotube-reinforced epoxy adhesive joints. J. Appl. Polym. Sci. 2009, 111, 2957–2962. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amount of CNT | Dispersion Time |
|---|---|
| 1; 1.5; 2; 3 | 5; 10; 15 |
| Specimen | Young‘s Modulus (GPa) | Max Strength (MPa) |
|---|---|---|
| Pure epoxy | 3.533 ± 0.04 | 47.19 ± 1.05 |
| 1 wt % CNT–epoxy | 3.045 ± 0.03 | 68.36 ± 2.74 |
| 1.5 wt % CNT–epoxy | 3.109 ± 0.04 | 64.89 ± 1.33 |
| 2 wt % CNT–epoxy | 2.932 ± 0.05 | 62.26 ± 1.40 |
| 3 wt % CNT–epoxy | 2.008 ± 0.02 | 50.19 ± 1.65 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sam-Daliri, O.; Faller, L.-M.; Farahani, M.; Roshanghias, A.; Oberlercher, H.; Mitterer, T.; Araee, A.; Zangl, H. MWCNT–Epoxy Nanocomposite Sensors for Structural Health Monitoring. Electronics 2018, 7, 143. https://doi.org/10.3390/electronics7080143
Sam-Daliri O, Faller L-M, Farahani M, Roshanghias A, Oberlercher H, Mitterer T, Araee A, Zangl H. MWCNT–Epoxy Nanocomposite Sensors for Structural Health Monitoring. Electronics. 2018; 7(8):143. https://doi.org/10.3390/electronics7080143
Chicago/Turabian StyleSam-Daliri, Omid, Lisa-Marie Faller, Mohammadreza Farahani, Ali Roshanghias, Hannes Oberlercher, Tobias Mitterer, Alireza Araee, and Hubert Zangl. 2018. "MWCNT–Epoxy Nanocomposite Sensors for Structural Health Monitoring" Electronics 7, no. 8: 143. https://doi.org/10.3390/electronics7080143
APA StyleSam-Daliri, O., Faller, L.-M., Farahani, M., Roshanghias, A., Oberlercher, H., Mitterer, T., Araee, A., & Zangl, H. (2018). MWCNT–Epoxy Nanocomposite Sensors for Structural Health Monitoring. Electronics, 7(8), 143. https://doi.org/10.3390/electronics7080143