Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs




Abstract
:1. Introduction
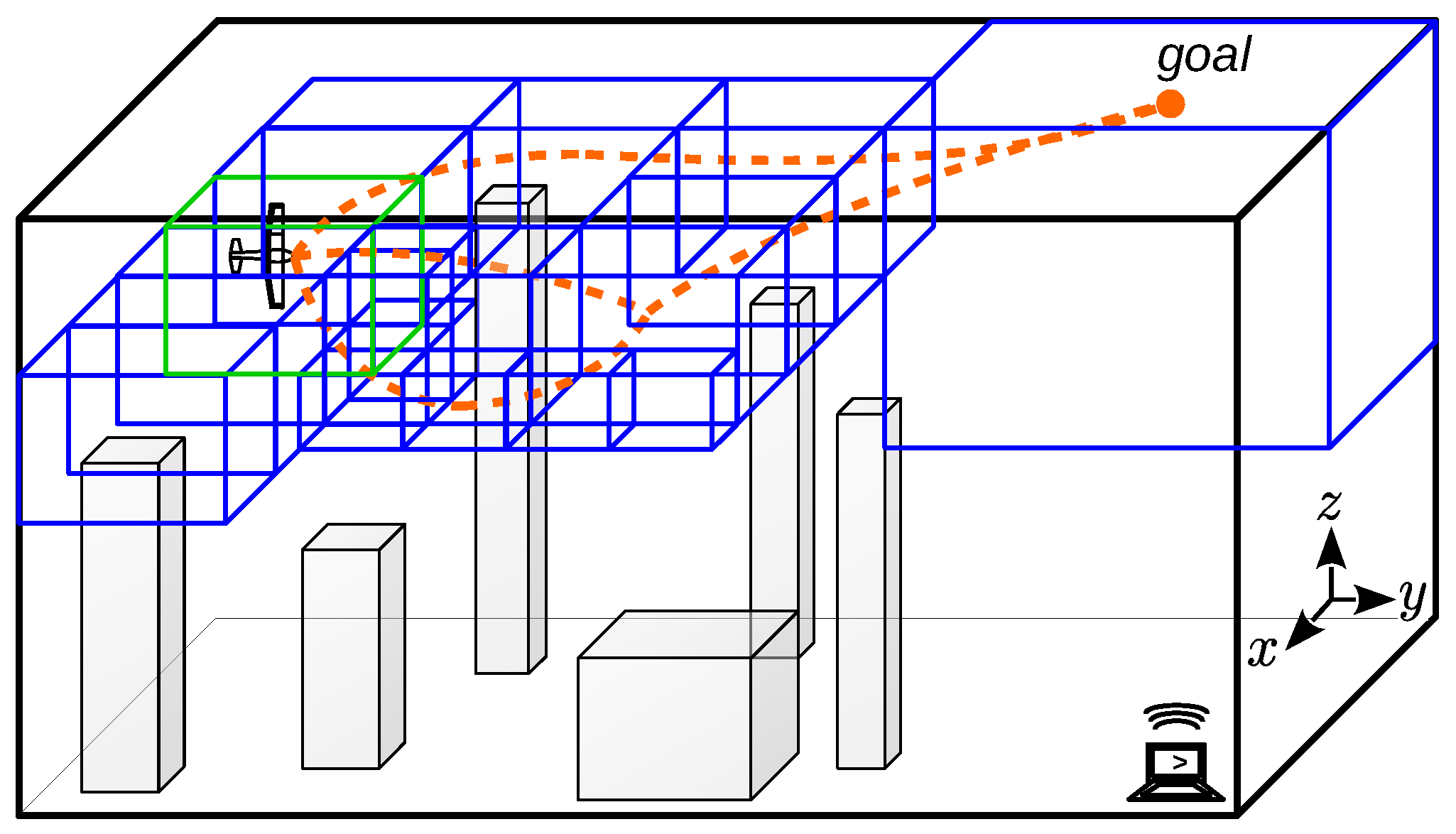
2. Problem Definition
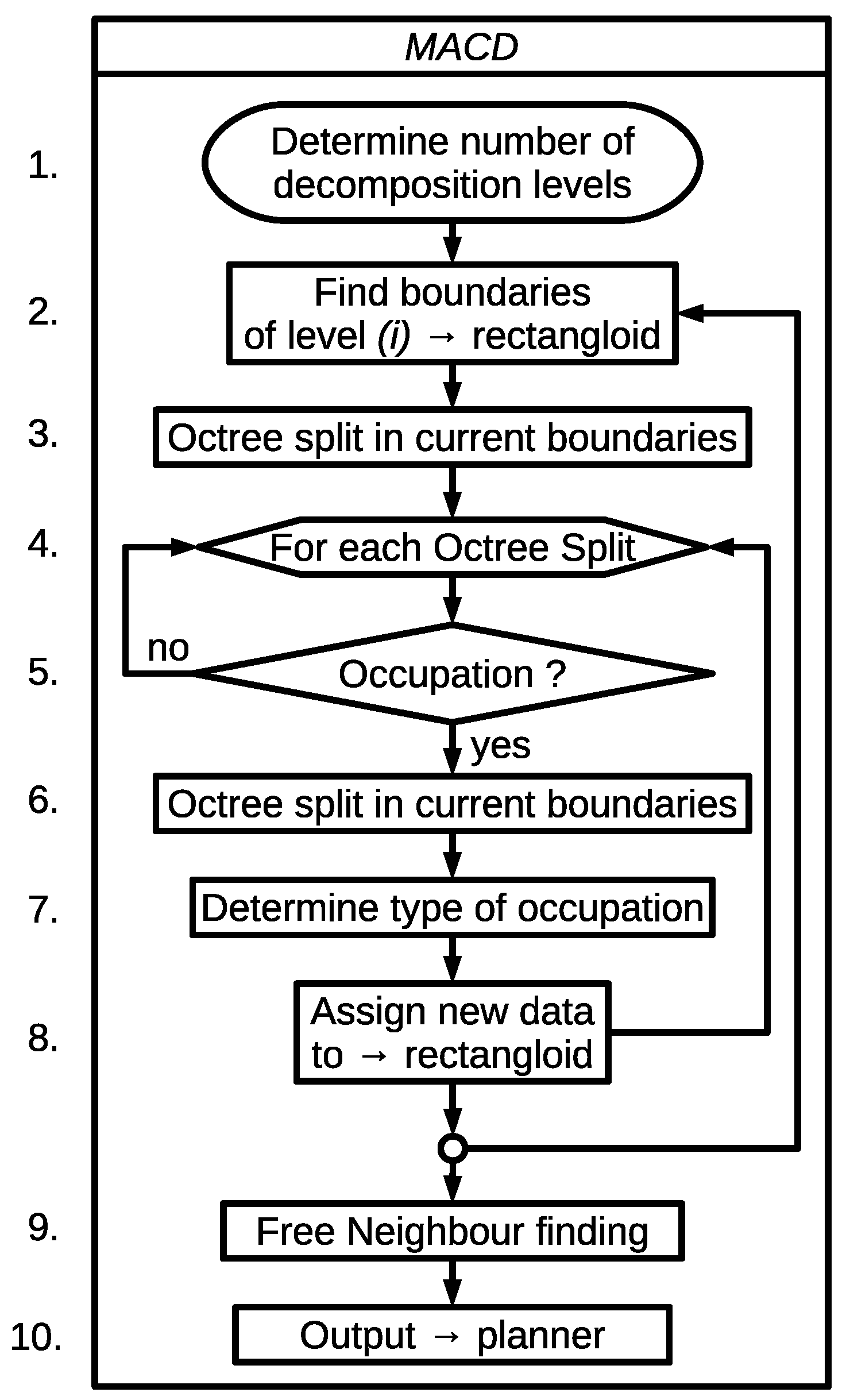
3. Modified Adaptive Cell Decomposition (MACD)
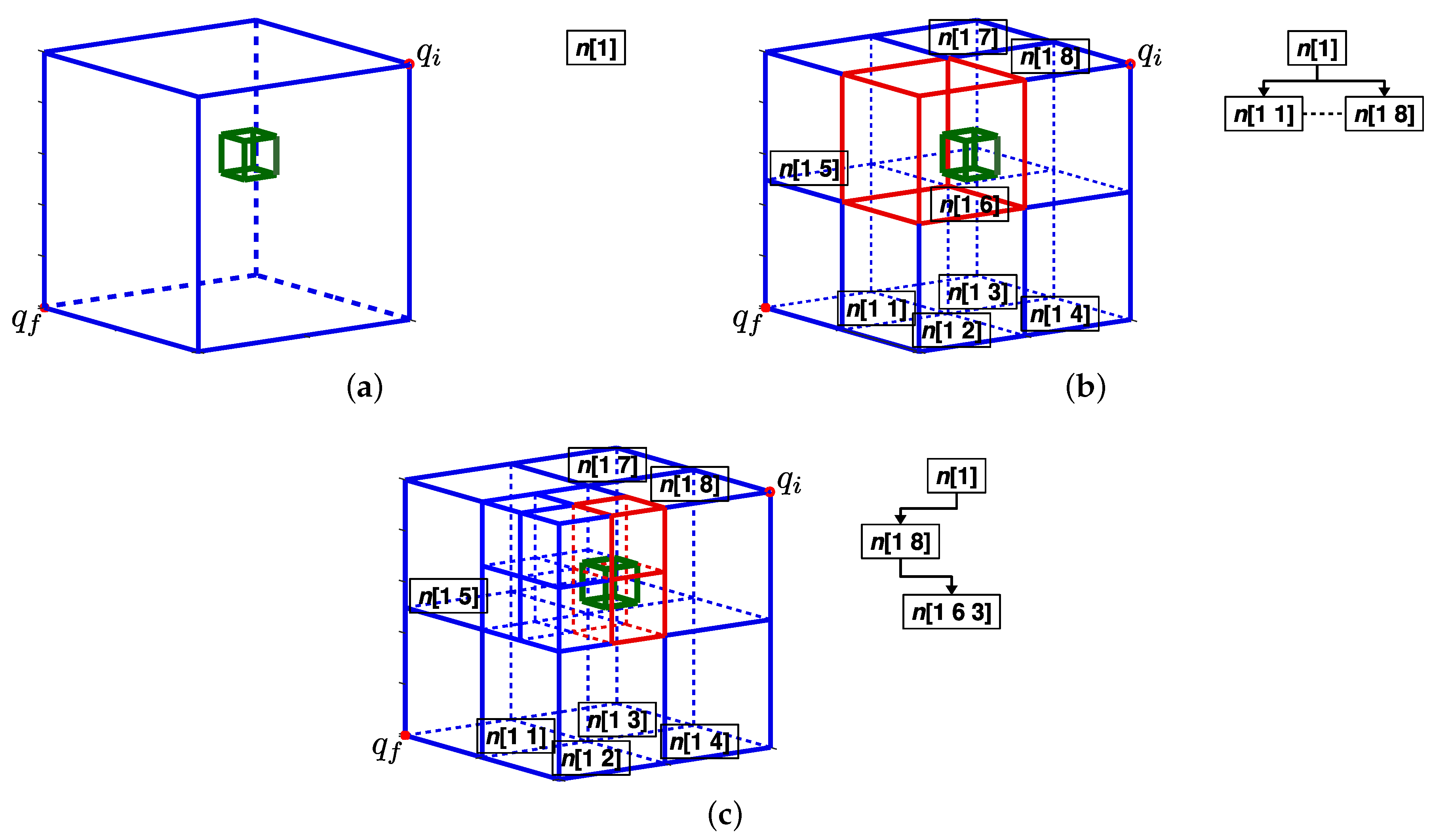
- Line 9: Boundaries of the current voxel are calculated.
- Line 12: Boundaries of the sub-voxel are assigned to rectangloid.
- Line 13: This step does a total routing by searching the environment for obstacle collisions.
- Line 24: The vertex variable collects each () of rectangloid structure.
- Line 25: The edges variable determines the structure that joins every vertex.
- Line 26:Dijkstra’s algorithm is used to determine .
| Algorithm 1 Modified Adaptive Cell Decomposition (MACD) |
|
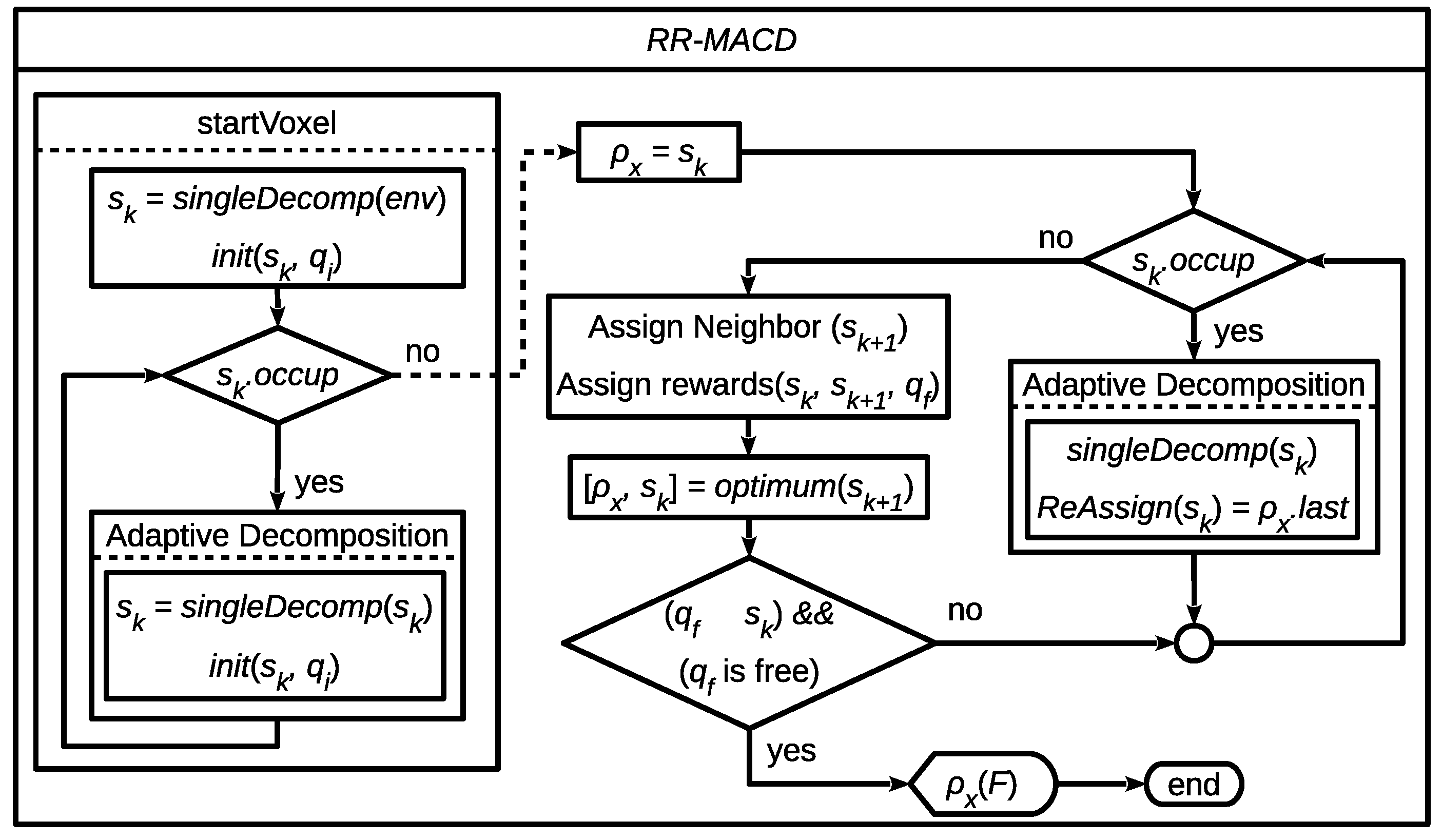
4. Recursive Rewarding Modified Approximate Cell Decomposition (RR-MACD)
4.1. Methodology
- q are two points in the environment space, where
- -
- is the initial point
- -
- is the final point.
- S is a finite set of M current states, where
- -
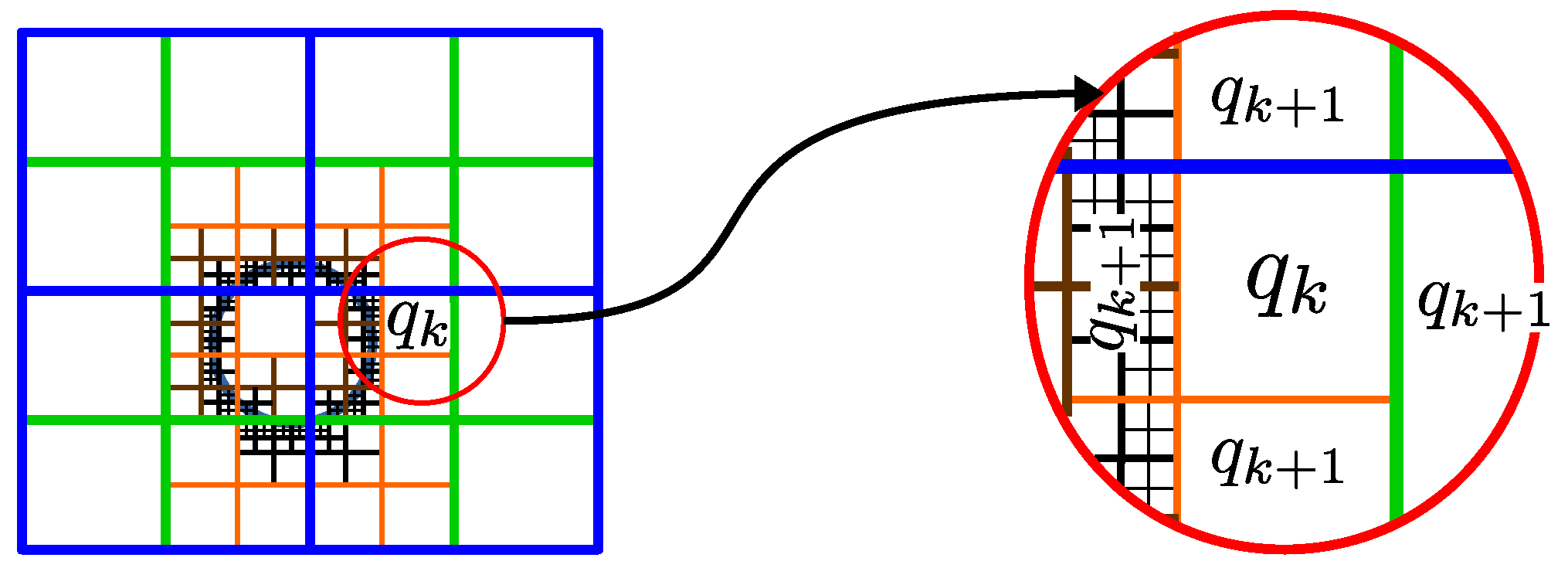
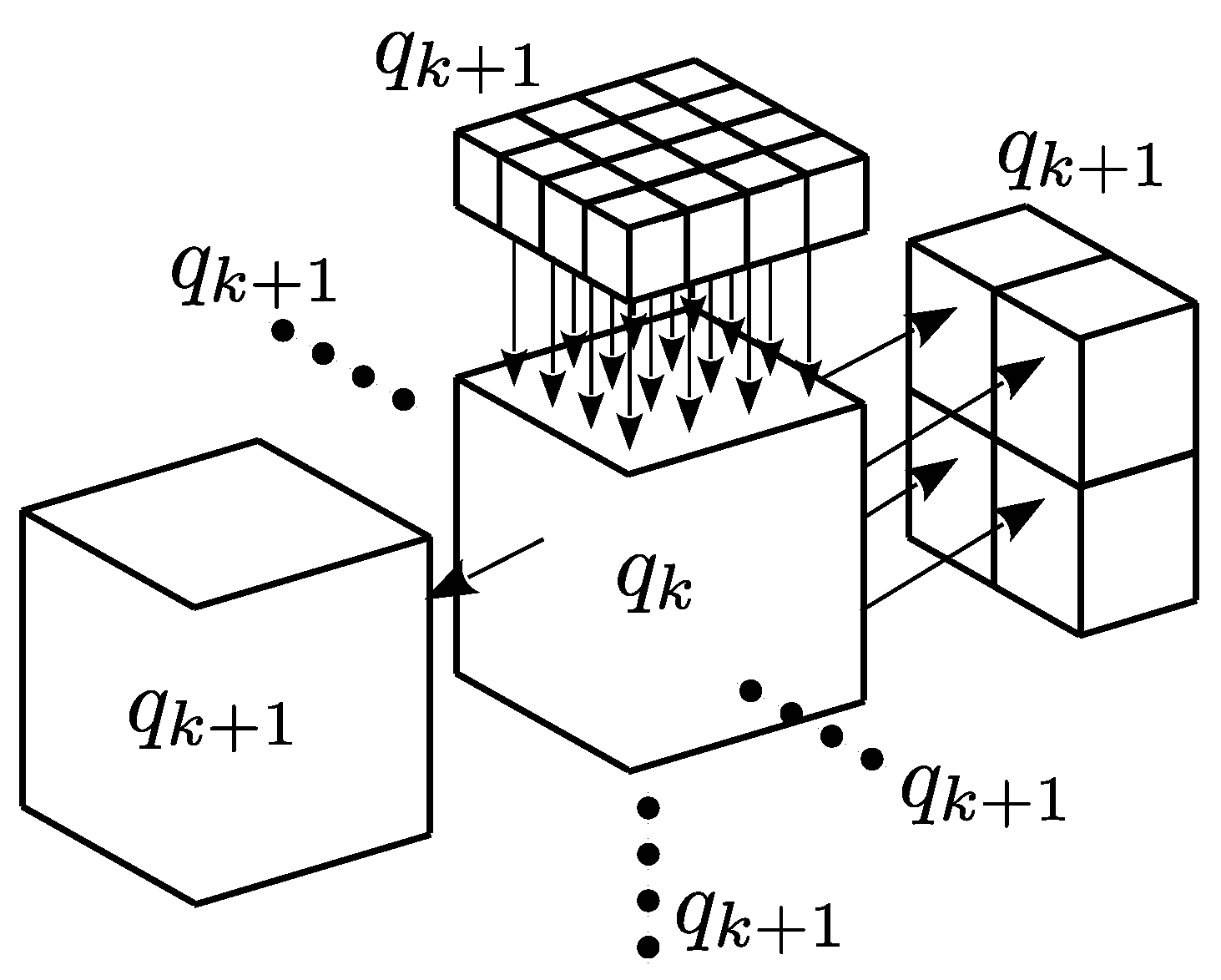
- is the finite set of collision-free voxels. Split in the current voxel , and the set of its neighbours .
- -
- is the finite set of occupied voxels.
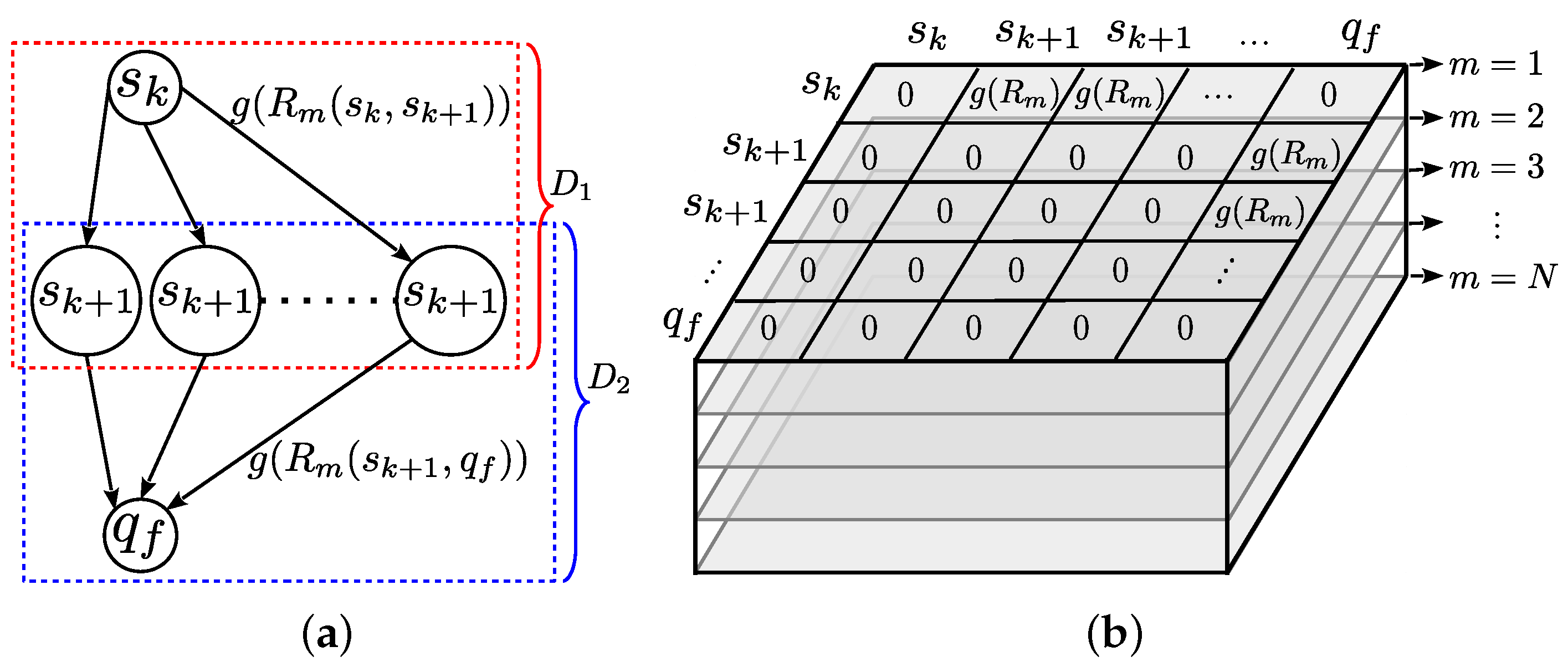
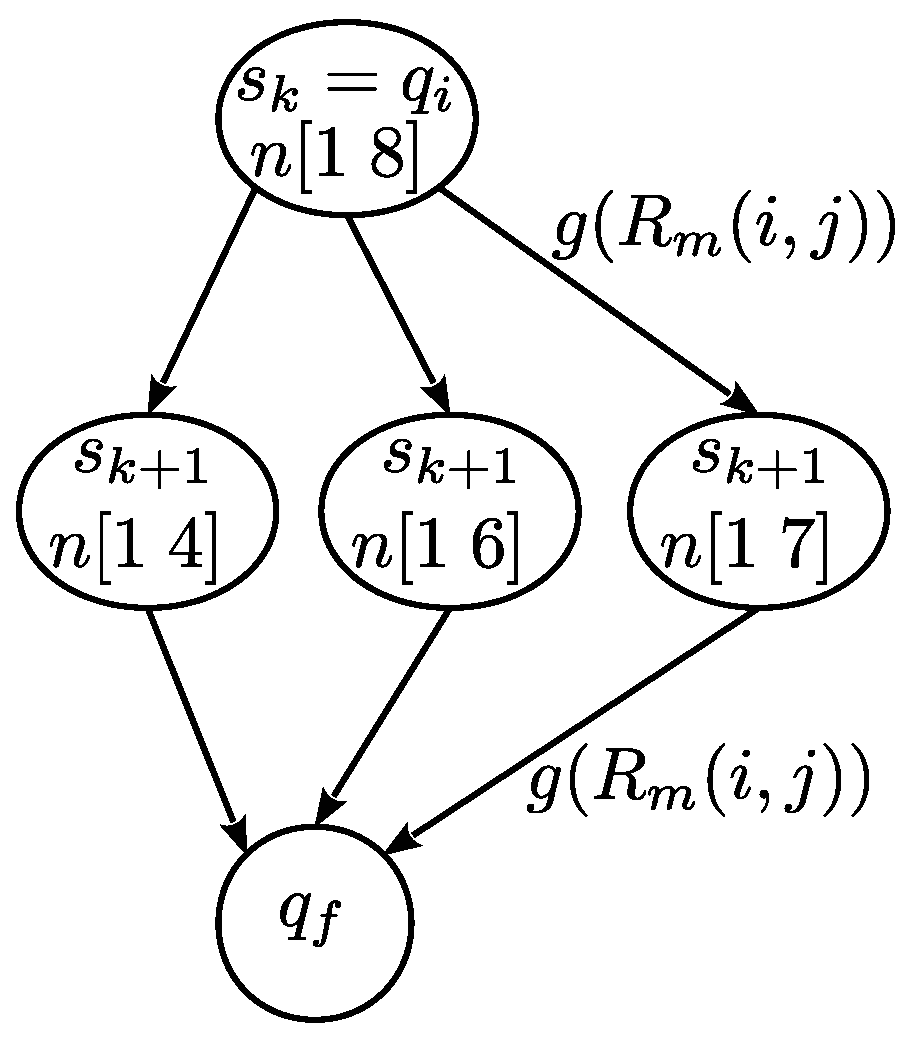
- is a set of N partial functions involved in the UAV navigation characteristics and determining feasible progress. In this paper, functions are defined as flight parameters, being:where is the Euclidean distance between any two states and is the distance in a straight line between and .where is the direction change measurement of the tangent vector to a curve, which shows the inclination angle between any two states.where is the direction change of the bi-normal vector around the tangent vector between any two states.is associated with the amount of battery and determines the possibility of success on a predefined trajectory:where is the normalised theoretical quantity of battery needed to fly from any state to any other—and the is the current amount of battery available for flight.Further, a Gaussian function is used to determine the reward in executing a possible action and it is defined as:where the transition cost values , have been normalised within boundaries . Notice how the greater the effort , the lower the reward and vice-versa. Therefore, the execution of an action from state to different states produces state transitions at different costs—an elevated cost will produce a lower reward on the transition.All these rewards can be expressed as a vector of flight parameters such as:
- is the received reward associated with a priority for executing an action on a function and is stated as the sum of two transition priority vectors and defined as:where is a predefined negative reward value in each state belonging to . Notice that the probability distribution values of the functions are independent and the set of answer vectors D which are mappings of . Therefore, this map is generated with a time-independent probability distribution. Hence, the probability of moving between one instant and the next does not change.Hence, the best reward value from vector D generates the best x—and the final path, denoted by , defines a finite labeled graph with vertex .
4.2. Simple Application
| Algorithm 2RR-MACD |
|
- (a)
- A stochastic process in discrete time has been defined (it lacks memory), the probability distribution for a future state depends solely on its present values and is independent of the current state history.
- (b)
- The sum of the priorities defined in vector is not equal to 1. .
- (c)
- The sum of the values of each priority vector, is not equal to 1. and .
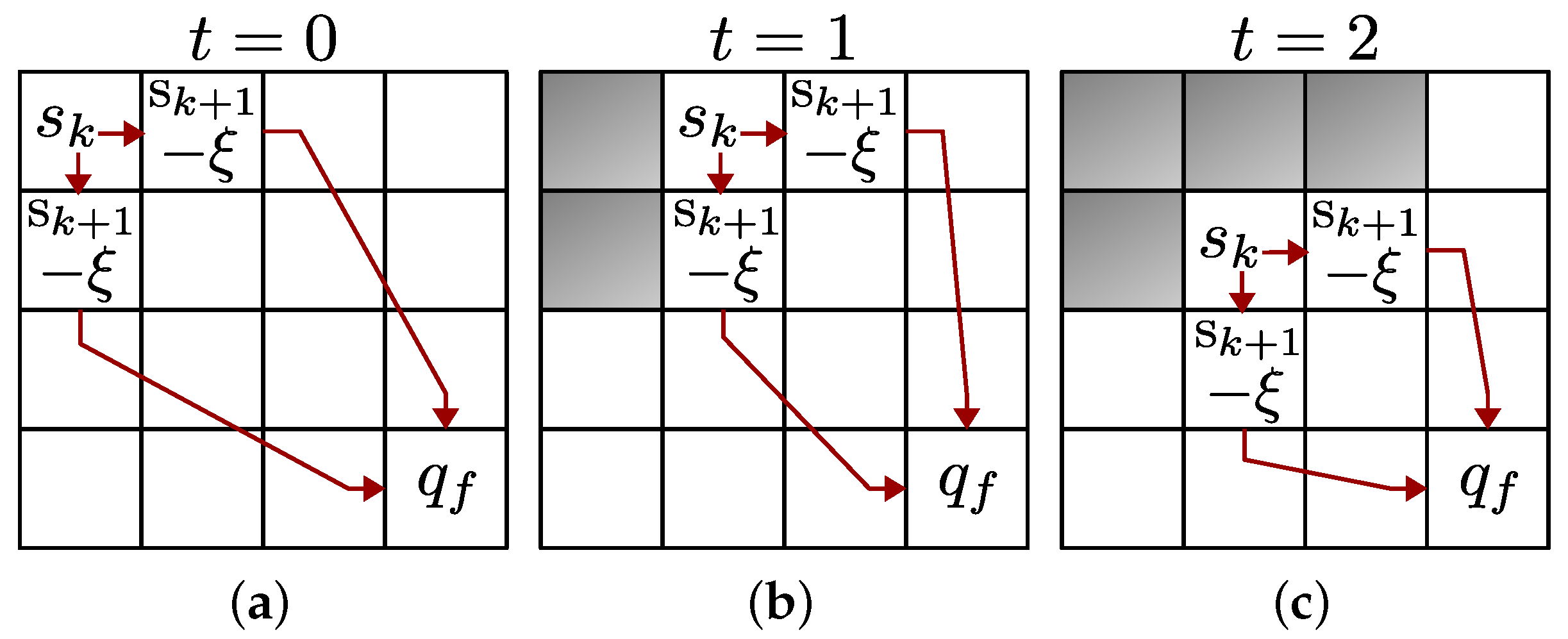
4.3. Dynamic Environment Approach
5. Experiments
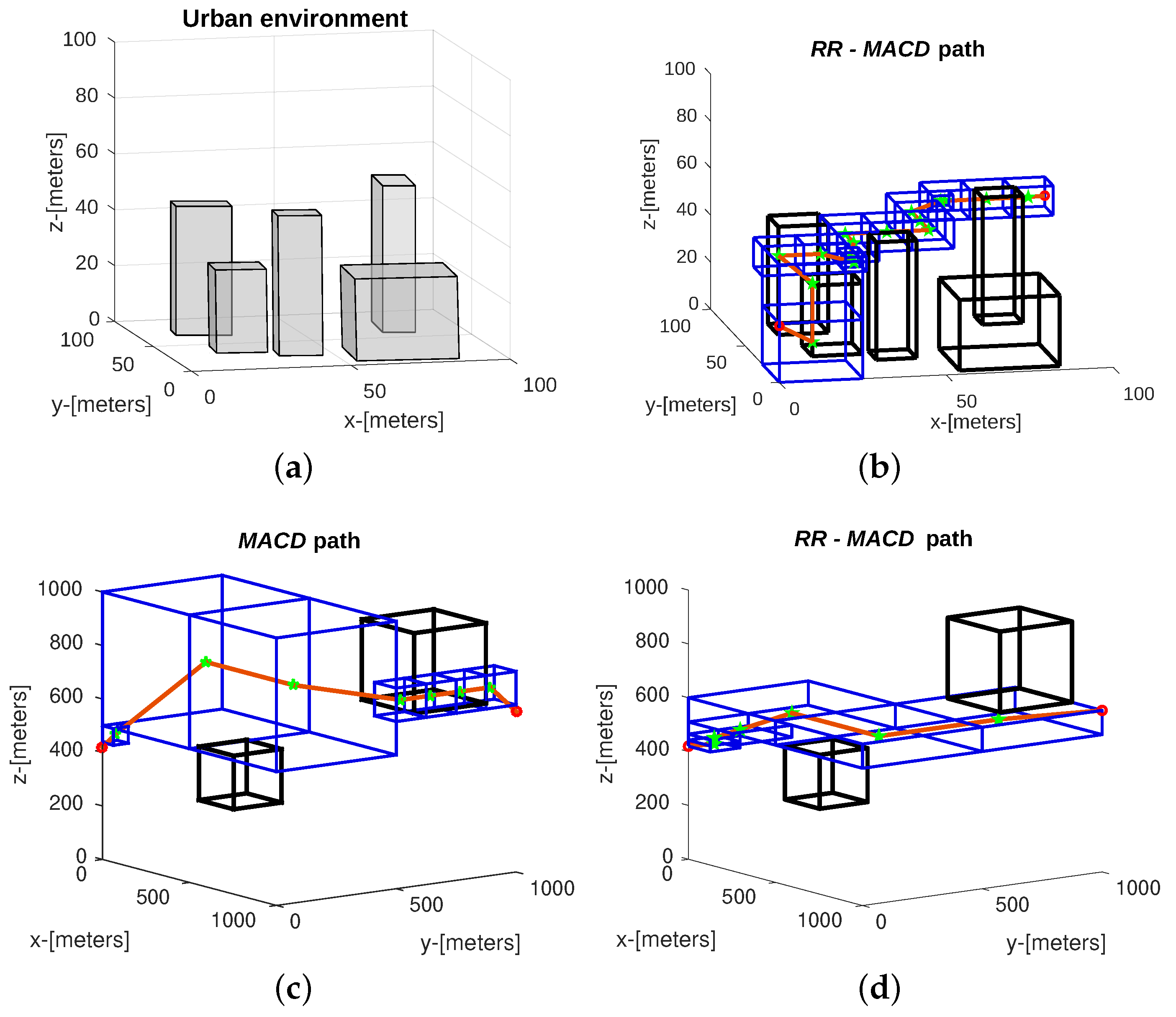
5.1. Example 1. Static Obstacles and Four Flight Parameters (Constraints)
5.2. Example 2. Static Obstacles and 10 Constraints
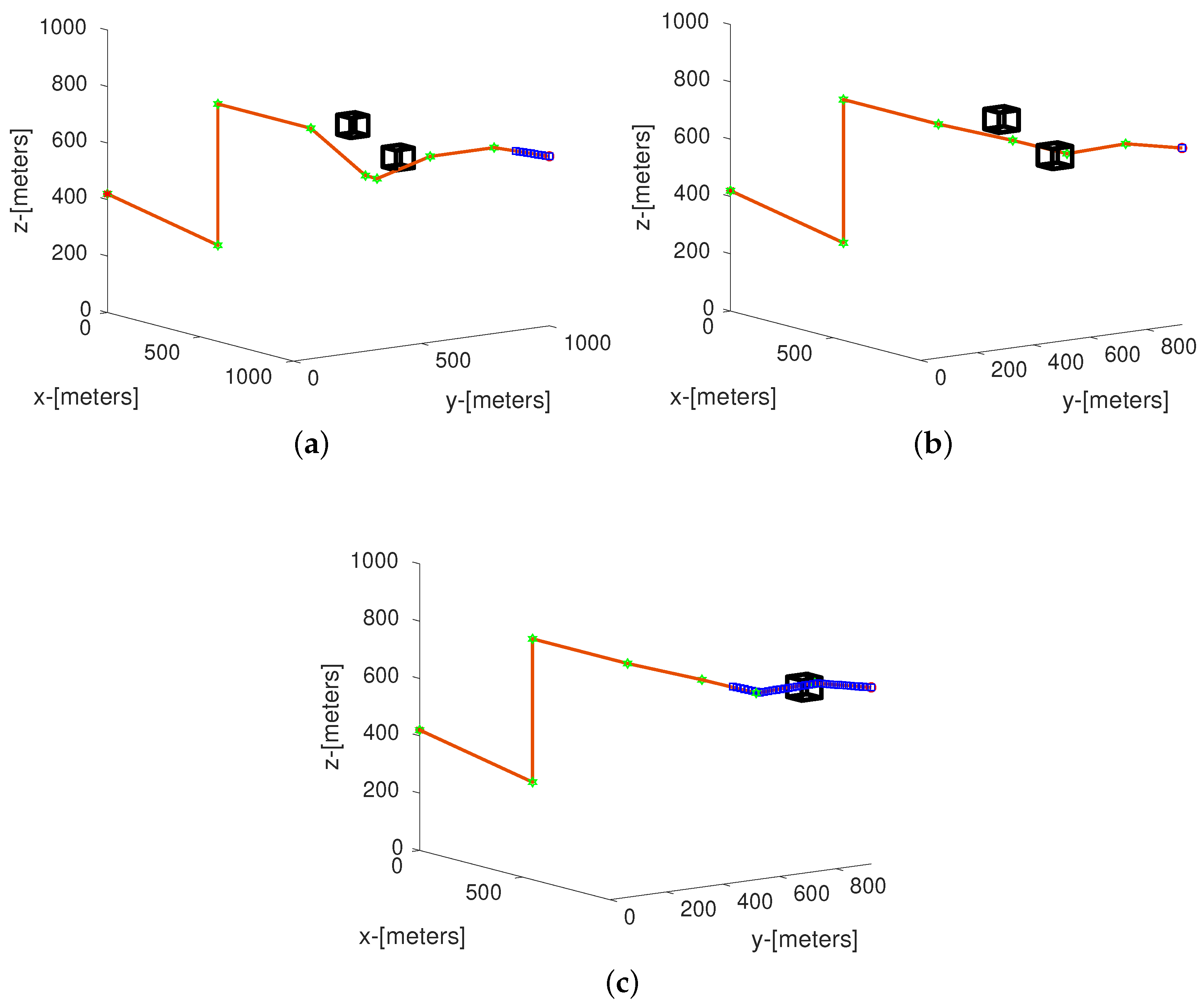
5.3. Example 3. Dynamic Obstacles
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Valavanis, K.; Vachtsevanos, G. Handbook of Unmanned Aerial Vehicles; Springer: Dordrecht, The Netherlands, 2015; pp. 2993–3009. [Google Scholar] [CrossRef]
- 20 Great UAV Applications Areas for Drones. Available online: http://air-vid.com/wp/20-great-uav-applications-areas-drones/ (accessed on 28 December 2018).
- Industry Experts—Microdrones. Available online: https://www.microdrones.com/en/industry-experts/ (accessed on 28 December 2018).
- Rodríguez, R.; Alarcón, F.; Rubio, D.; Ollero, A. Autonomous Management of an UAV Airfield. In Proceedings of the 3rd International Conference on Application and Theory of Automation in Command and Control Systems, Naples, Italy, 28–30 May 2013; pp. 28–30. [Google Scholar]
- Li, J.; Han, Y. Optimal Resource Allocation for Packet Delay Minimization in Multi-Layer UAV Networks. IEEE Commun. Lett. 2017, 21, 580–583. [Google Scholar] [CrossRef]
- Stuchlík, R.; Stachoň, Z.; Láska, K.; Kubíček, P. Unmanned Aerial Vehicle—Efficient mapping tool available for recent research in polar regions. Czech Polar Rep. 2015, 5, 210–221. [Google Scholar] [CrossRef]
- Pulver, A.; Wei, R. Optimizing the spatial location of medical drones. Appl. Geogr. 2018, 90, 9–16. [Google Scholar] [CrossRef]
- Claesson, A.; Svensson, L.; Nordberg, P.; Ringh, M.; Rosenqvist, M.; Djarv, T.; Samuelsson, J.; Hernborg, O.; Dahlbom, P.; Jansson, A.; et al. Drones may be used to save lives in out of hospital cardiac arrest due to drowning. Resuscitation 2017, 114, 152–156. [Google Scholar] [CrossRef] [PubMed]
- Reineman, B.; Lenain, L.; Statom, N.; Melville, W. Development and Testing of Instrumentation for UAV-Based Flux Measurements within Terrestrial and Marine Atmospheric Boundary Layers. J. Atmos. Ocean. Technol. 2013, 30, 1295–1319. [Google Scholar] [CrossRef]
- Hernández, E.; Vázquez, M.; Zurro, M. Álgebra lineal y Geometría, 3rd ed.; Pearson: Upper Saddle River, NJ, USA, 2012. [Google Scholar]
- LaValle, S. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; pp. 1–826. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M. Sampling-Based Robot Motion Planning: A Review. IEEE Access 2014, 2, 56–77. [Google Scholar] [CrossRef]
- Hernandez, K.; Bacca, B.; Posso, B. Multi-goal path planning autonomous system for picking up and delivery tasks in mobile robotics. IEEE Lat. Am. Trans. 2017, 15, 232–238. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; Von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable SLAM system with full 3D motion estimation. In Proceedings of the 9th IEEE International Symposium on Safety, Security, and Rescue Robotics SSRR 2011, Tokyo, Japan, 22–24 August 2011; pp. 155–160. [Google Scholar] [CrossRef]
- Abbadi, A.; Matousek, R.; Jancik, S.; Roupec, J. Rapidly-exploring random trees: 3D planning. In Proceedings of the 18th International Conference on Soft Computing MENDEL, Brno, Czech Republic, 27–29 June 2012; pp. 594–599. [Google Scholar]
- Aguilar, W.; Morales, S. 3D Environment Mapping Using the Kinect V2 and Path Planning Based on RRT Algorithms. Electronics 2016, 5, 70. [Google Scholar] [CrossRef]
- Aguilar, W.; Morales, S.; Ruiz, H.; Abad, V. RRT* GL Based Optimal Path Planning for Real-Time Navigation of UAVs. Soft Comput. 2017, 17, 585–595. [Google Scholar] [CrossRef]
- Yao, P.; Wang, H.; Su, Z. Hybrid UAV path planning based on interfered fluid dynamical system and improved RRT. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 829–834. [Google Scholar] [CrossRef]
- Yan, F.; Liu, Y.; Xiao, J. Path Planning in Complex 3D Environments Using a Probabilistic Roadmap Method. Int. J. Autom. Comput. 2013, 10, 525–533. [Google Scholar] [CrossRef]
- Yeh, H.; Thomas, S.; Eppstein, D.; Amato, N. UOBPRM: A uniformly distributed obstacle-based PRM. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, 7–12 October 2012; pp. 2655–2662. [Google Scholar] [CrossRef]
- Denny, J.; Amatoo, N. Toggle PRM: A Coordinated Mapping of C-Free and C-Obstacle in Arbitrary Dimension. Algorithm. Found. Robot. X 2013, 86, 297–312. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Wei, C.; Wu, J.; Zhu, X. Improved PRM method of low altitude penetration trajectory planning for UAVs. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 2651–5656. [Google Scholar] [CrossRef]
- Ortiz-Arroyo, D. A hybrid 3D path planning method for UAVs. In Proceedings of the 2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Cancún, México, 23–25 November 2015; pp. 123–132. [Google Scholar] [CrossRef]
- Thanou, M.; Tzes, A. Distributed visibility-based coverage using a swarm of UAVs in known 3D-terrains. In Proceedings of the 2014 6th International Symposium on Communications, Control and Signal Processing (ISCCSP), Athens, Greece, 21–23 May 2014; pp. 425–428. [Google Scholar] [CrossRef]
- Qu, Y.; Zhang, Y.; Zhang, Y. Optimal flight path planning for UAVs in 3-D threat environment. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 149–155. [Google Scholar] [CrossRef]
- Fang, Z.; Luan, C.; Sun, Z. A 2D Voronoi-Based Random Tree for Path Planning in Complicated 3D Environments. Intell. Auton. Syst. 2017, 531, 433–445. [Google Scholar] [CrossRef]
- Khuswendi, T.; Hindersah, H.; Adiprawita, W. UAV path planning using potential field and modified receding horizon A* 3D algorithm. In Proceedings of the 2011 International Conference on Electrical Engineering and Informatics, Bandung, Indonesia, 17–19 July 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, J. The Three-Dimension Path Planning of UAV Based on Improved Artificial Potential Field in Dynamic Environment. In Proceedings of the 2013 5th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, Zhejiang, China, 26–27 August 2013; Volume 2, pp. 144–147. [Google Scholar] [CrossRef]
- Rivera, D.; Prieto, F.; Ramirez, R. Trajectory Planning for UAVs in 3D Environments Using a Moving Band in Potential Sigmoid Fields. In Proceedings of the 2012 Brazilian Robotics Symposium and Latin American Robotics Symposium, Fortaleza, Ceara, Brazil, 16–19 October 2012; pp. 115–119. [Google Scholar] [CrossRef]
- Liu, L.; Shi, R.; Li, S.; Wu, J. Path planning for UAVS based on improved artificial potential field method through changing the repulsive potential function. In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016; pp. 2011–2015. [Google Scholar] [CrossRef]
- Dijkstra, E. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Verscheure, L.; Peyrodie, L.; Makni, N.; Betrouni, N.; Maouche, S.; Vermandel, M. Dijkstra’s algorithm applied to 3D skeletonization of the brain vascular tree: Evaluation and application to symbolic. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3081–3084. [Google Scholar] [CrossRef]
- Hart, P.E.; Nils, J. A formal basis for the Heuristic Determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Niu, L.; Zhuo, G. An Improved Real 3D a* Algorithm for Difficult Path Finding Situation. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Beijing, China, 3–11 July 2008; Volume 37, pp. 927–930. [Google Scholar]
- Stentz, A. Optimal and Efficient Path Planning for Partially-Known Environments. ICRA 1994, 94, 3310–3317. [Google Scholar]
- Ferguson, D.; Stentz, A. Field D*: An Interpolation-Based Path Planner and Replanner. Robot. Res. 2007, 28, 239–253. [Google Scholar] [CrossRef] [Green Version]
- De Filippis, L.; Guglieri, G.; Quagliotti, F. Path Planning Strategies for UAVS in 3D Environments. J. Intell. Robotic Syst. 2012, 65, 247–264. [Google Scholar] [CrossRef]
- Nosrati, M.; Karimi, R.; Hasanvand, H. Investigation of the * (Star) Search Algorithms: Characteristics, Methods and Approaches. World Appl. Program. 2012, 2, 251–256. [Google Scholar]
- Kroumov, V.; Yu, J.; Shibayama, K. 3D path planning for mobile robots using simulated annealing neural network. In Proceedings of the 2009 International Conference on Networking, Sensing and Control, Okayama, Japan, 29 March 2009; pp. 130–135. [Google Scholar]
- Gautam, S.; Verma, N. Path planning for unmanned aerial vehicle based on genetic algorithm & artificial neural network in 3D. In Proceedings of the 2014 International Conference on Data Mining and Intelligent Computing (ICDMIC), Odisha, India, 20–21 December 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Maturana, D.; Scherer, S. 3D Convolutional Neural Networks for landing zone detection from LiDAR. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Beijing, China, 2–5 August 2015; Volume 2015, pp. 3471–3478. [Google Scholar] [CrossRef]
- Iswanto, I.; Wahyunggoro, O.; Cahyadi, A. Quadrotor Path Planning Based on Modified Fuzzy Cell Decomposition Algorithm. TELKOMNIKA Telecommun. Comput. Electron. Control 2016, 14, 655–664. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Wei, Y.; Gao, Y. 3D path planning for AUV using fuzzy logic. In Proceedings of the Computer Science and Information Processing (CSIP)), Xi’an, Shaanxi, China, 24–26 August 2012; pp. 599–603. [Google Scholar]
- Duan, H.; Yu, Y.; Zhang, X.; Shao, S. Three-dimension path planning for UCAV using hybrid meta-heuristic ACO-DE algorithm. Simul. Model. Pract. Theory 2010, 18, 1104–1115. [Google Scholar] [CrossRef]
- He, Y.; Zeng, Q.; Liu, J.; Xu, G.; Deng, X. Path planning for indoor UAV based on Ant Colony Optimization. In Proceedings of the 2013 25th Chinese Control and Decision Conference (CCDC), Guiyang, China, 25–27 May 2013; pp. 2919–2923. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, L.; Wang, S. UCAV Path Planning by Fitness-Scaling Adaptive Chaotic Particle Swarm Optimization. Math. Probl. Eng. 2013, 1–9. [Google Scholar] [CrossRef]
- Goel, U.; Varshney, S.; Jain, A.; Maheshwari, S.; Shukla, A. Three Dimensional Path Planning for UAVs in Dynamic Environment using Glow-worm Swarm Optimization. Procedia Comput. Sci. 2013, 133, 230–239. [Google Scholar] [CrossRef]
- Chen, Y.; Mei, Y.; Yu, J.; Su, X.; Xu, N. Three-dimensional unmanned aerial vehicle path planning using modified wolf pack search algorithm. Neurocomputing 2017, 226, 4445–4457. [Google Scholar] [CrossRef]
- Wang, G.; Chu, H.E.; Mirjalili, S. Three-dimensional path planning for UCAV using an improved bat algorithm. Aerosp. Sci. Technol. 2016, 49, 231–238. [Google Scholar] [CrossRef]
- Aghababa, M. 3D path planning for underwater vehicles using five evolutionary optimization algorithms avoiding static and energetic obstacles. Appl. Ocean Res. 2012, 38, 48–62. [Google Scholar] [CrossRef]
- Mac, T.; Copot, C.; Tran, D.; De Keyser, R. Heuristic approaches in robot path planning: A survey. Rob. Auton. Syst. 2016, 86, 13–28. [Google Scholar] [CrossRef]
- Szirmay-Kalos, L.; Márton, G. Worst-case versus average case complexity of ray-shooting. Computing 1998, 61, 103–131. [Google Scholar] [CrossRef] [Green Version]
- Berger, M.J.; Oliger, J. Adaptive mesh refinement for hyperbolic partial differential equations. Comput. Phys. 1984, 53, 484–512. [Google Scholar] [CrossRef]
- Min, C.; Gibou, F. A second order accurate projection method for the incompressible Navier-Stokes equations on non-graded adaptive grids. J. Comput. Phys. 2006, 219, 912–929. [Google Scholar] [CrossRef]
- Hasbestan, J.J.; Senocak, I. Binarized-octree generation for Cartesian adaptive mesh refinement around immersed geometries. J. Comput. Phys. 2018, 368, 179–195. [Google Scholar] [CrossRef] [Green Version]
- Pantano, C.; Deiterding, R.; Hill, D.J.; Pullin, D.I. A low numerical dissipation patch-based adaptive mesh refinement method for large-eddy simulation of compressible flows. J. Comput. Phys. 2007, 221, 3–87. [Google Scholar] [CrossRef]
- Ryde, J.; Hu, H. 3D mapping with multi-resolution occupied voxel lists. Auton. Robots 2010, 28, 169–185. [Google Scholar] [CrossRef]
- Samet, H.; Kochut, A. Octree approximation an compression methods. In Proceedings of the First International Symposium on 3D Data Processing Visualization and Transmission, Padova, Italy, 19–21 June 2002; pp. 460–469. [Google Scholar] [CrossRef]
- Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. UAV motion planning and obstacle avoidance based on adaptive 3D cell decomposition: Continuous space vs discrete space. In Proceedings of the 2017 IEEE Ecuador Technical Chapters Meeting (ETCM), Salinas, Ecuador, 6–20 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Markus, S.; Akesson, K.; Martin, F. Modeling of discrete event systems using finite automata with variables. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3387–3392. [Google Scholar] [CrossRef]
- Yang, Y.; Prasanna, V. Space-time tradeoff in regular expression matching with semi-deterministic finite automata. In Proceedings of the 2011 IEEE INFOCOM, Shanghai, China, 17 August 2007; pp. 1853–1861. [Google Scholar] [CrossRef]
- Normativa Sobre Drones en España [2019]—Aerial Insights. Available online: http://www.aerial-insights.co/blog/normativa-drones-espana/ (accessed on 28 December 2018).
- Disposición 15721 del BOE núm. 316 de 2017 - BOE.es. Available online: https://www.boe.es/boe/dias/2017/12/29/pdfs/BOE-A-2017-15721.pdf (accessed on 28 December 2018).
- Velasco-Carrau, J.; García-Nieto, S.; Salcedo, J.; Bishop, R. Multi-Objective Optimization for Wind Estimation and Aircraft Model Identification. J. Guid. Control Dyn. 2016, 39, 372–389. [Google Scholar] [CrossRef] [Green Version]
- Vanegas, G.; Samaniego, F.; Girbes, V.; Armesto, L.; Garcia-Nieto, S. Smooth 3D path planning for non-holonomic UAVs. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), València, Spain, 24–26 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Samaniego, F.; Sanchís, J.; García-Nieto, S.; Simarro, R. Comparative Study of 3-Dimensional Path Planning Methods Constrained by the Maneuverability of Unmanned Aerial Vehicles. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), València, Spain, 24–26 October 2018; pp. 13–20. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Time Complexity | Memory | Real Time |
|---|---|---|---|
| Sampling based algorithms | On-line | ||
| Node based algorithms | On-line | ||
| Bioinspired algoritms | Off-line |
| Approach | Authors | Static Obstacle | Dynamic Obstacle | Simulation | Real | Year |
|---|---|---|---|---|---|---|
| RRT | Abbadi, A. [15] Aguilar, W. [16] Aguilar, W. [17] Yao, P. [18] | x o x x | x x o o | x x x x | o x x o | [2012] [2016] [2017] [2017] |
| PRM | Yan, F. [19] Yeh, H. [20] Denny, J. [21] Li, Q. [22] Ortiz-Arroyo, D. [23] | x x x x x | o o o o o | o x x x x | x o o o o | [2013] [2012] [2013] [2014] [2015] |
| Voronoi | Thanou, M. [24] Qu, Y. [25] Fang, Z. [26] | x x x | o o o | x x x | o o x | [2014] [2014] [2017] |
| Artificial Potencial | Khuswendi, T. [27] Chen, X. [28] Rivera, D. [29] Liu L. [30] | x x x x | x x x x | x x x x | o o o o | [2011] [2013] [2012] [2016] |
| ANN | Kroumov, V. [39] Gautam, S. [40] Maturana, D. [41] | x x x | o o o | x x o | o o x | [2010] [2014] [2015] |
| Fuzzy Logic | Iswanto, I. [42] LIU, S. [43] | x x | x o | x x | o o | [2016] [2012] |
| ACO | Duan, H. [44] He, Y. [45] | x x | o o | x x | o o | [2010] [2013] |
| PSO | Zhang, Y. [46] Goel, U. [47] | x x | x x | x x | o o | [2013] [2018] |
| Others | YongBo, C. [48] Wang, G. [49] Aghababa, M. [50] | x x x | o o o | x x x | o o o | [2017] [2016] [2012] |

| # | UAV Target Coordinates (m) | Obstacles Dimensions (m) | Obstacles Ubication (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| init | goal | |||||||||||
| x | y | z | x | y | z | x | y | z | x | y | z | |
| 1 | 100 | 100 | 42 | 0 | 0 | 24 | 12 | 12 | 50 | 40 | 30 | 25 |
| 15 | 15 | 30 | 24 | 40 | 15 | |||||||
| 30 | 30 | 30 | 70 | 20 | 15 | |||||||
| 15 | 15 | 46 | 20 | 70 | 23 | |||||||
| 12 | 12 | 54 | 80 | 70 | 27 | |||||||
| 2 | 1000 | 1000 | 600 | 0 | 0 | 420 | 200 | 200 | 200 | 333 | 333 | 333 |
| 300 | 300 | 300 | 777 | 777 | 777 | |||||||
| 3 | 1000 | 1000 | 300 | 0 | 0 | 700 | 100 | 100 | 100 | 400 | 400 | 400 |
| 150 | 150 | 150 | 400 | 400 | 800 | |||||||
| 4 | 1200 | 1200 | 390 | 0 | 0 | 720 | 200 | 300 | 400 | 200 | 800 | 400 |
| 20 | 20 | 20 | 300 | 200 | 700 | |||||||
| 5 | 1200 | 1200 | 800 | 0 | 0 | 500 | 10 | 10 | 10 | 600 | 600 | 600 |
| 15 | 15 | 15 | 200 | 800 | 800 | |||||||
| 15 | 15 | 15 | 200 | 800 | 200 | |||||||
| # | MACD | RR-MACD 4 Constraints | RR-MACD 4 vs. MACD (%) | RR-MACD 10 vs. RR-MACD 4 (%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| decom. Time (s) | Dijks. Time (s) | # | # | decom. Time (s). | # | # | decomp. Time | decomp. Time | |||||
| 1 | 0.117 | 0.038 | 205 | 19 | 0.056 | 115 | 18 | 36.238 | 54.641 | 93.684 | +51.449 | +74.975 | +50.000 |
| 2 | 0.104 | 0.049 | 496 | 11 | 0.012 | 27 | 8 | 8.368 | 5.443 | 72.727 | +18.710 | +26.337 | +25.000 |
| 3 | 0.151 | 0.048 | 426 | 13 | 0.014 | 19 | 6 | 7.105 | 4.460 | 46.153 | −25.118 | −18.723 | +1.851 |
| 4 | 3.535 | 1.021 | 5201 | 19 | 0.003 | 11 | 6 | 0.080 | 0.211 | 31.578 | +327.894 | +363.636 | +57.407 |
| 5 | 0.078 | 0.032 | 294 | 23 | 0.009 | 19 | 7 | 8.470 | 6.462 | 30.434 | +115.017 | +79.532 | +33.333 |
| Distance Travelled Meters (m) | ||||
|---|---|---|---|---|
| Scene | MACD | RR-MACD4 | RR-MACD10 | |
| 1 | 224.060 | 197.410 | 241.600 | |
| 2 | 1853.000 | 1592.545 | 1734.054 | |
| 3 | 1768.600 | 1790.181 | 1728.300 | |
| 4 | 1693.100 | 1868.463 | 2221.354 | |
| 5 | 1731.800 | 1829.690 | 2123.954 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samaniego, F.; Sanchis, J.; García-Nieto, S.; Simarro, R. Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs. Electronics 2019, 8, 306. https://doi.org/10.3390/electronics8030306
Samaniego F, Sanchis J, García-Nieto S, Simarro R. Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs. Electronics. 2019; 8(3):306. https://doi.org/10.3390/electronics8030306
Chicago/Turabian StyleSamaniego, Franklin, Javier Sanchis, Sergio García-Nieto, and Raúl Simarro. 2019. "Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs" Electronics 8, no. 3: 306. https://doi.org/10.3390/electronics8030306
APA StyleSamaniego, F., Sanchis, J., García-Nieto, S., & Simarro, R. (2019). Recursive Rewarding Modified Adaptive Cell Decomposition (RR-MACD): A Dynamic Path Planning Algorithm for UAVs. Electronics, 8(3), 306. https://doi.org/10.3390/electronics8030306