Estimation of Optimal Operating Frequency for Wireless EV Charging System under Misalignment


Abstract
:1. Introduction
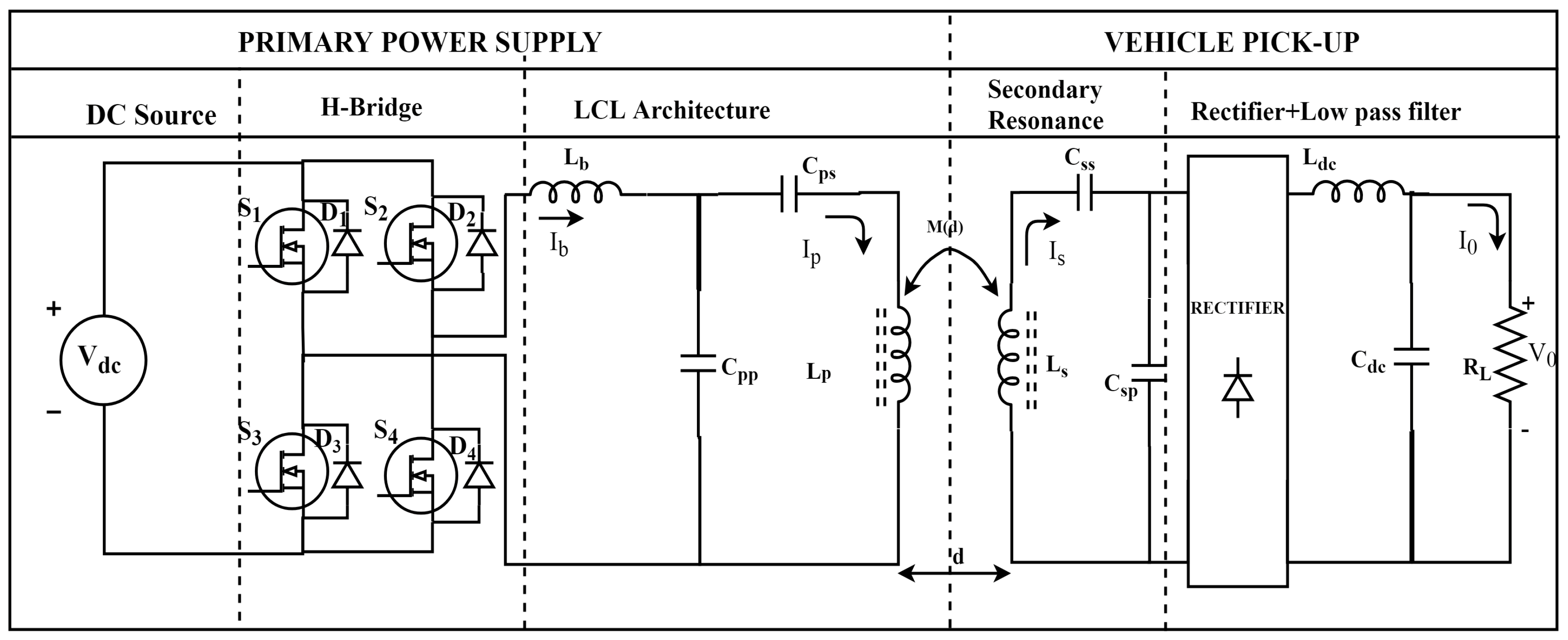
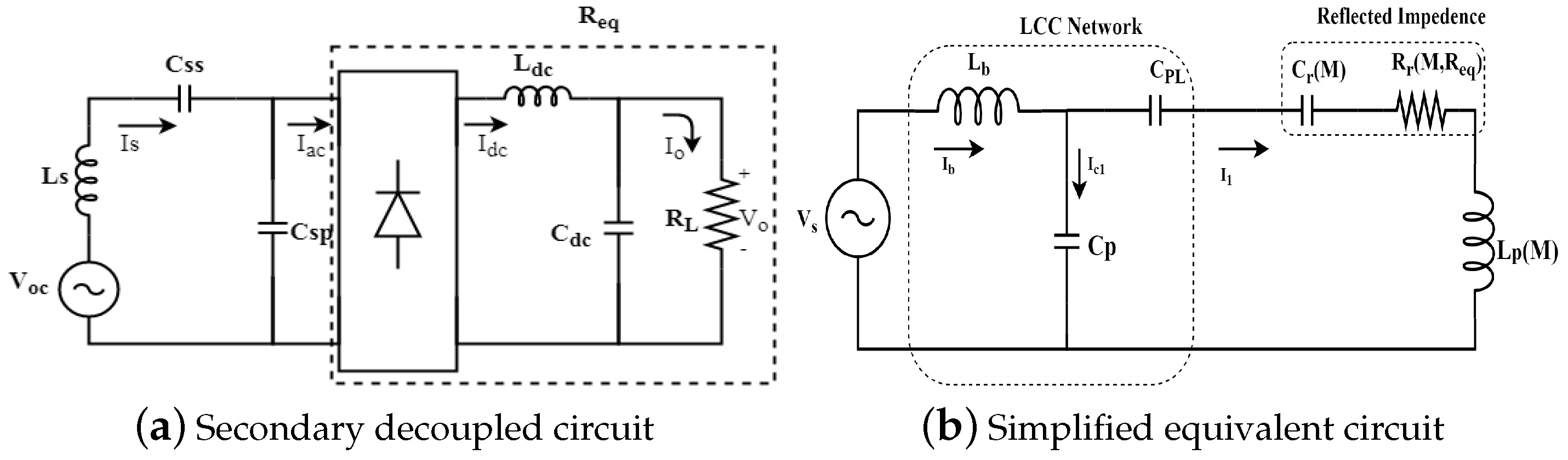
2. LCL IPT Architecture
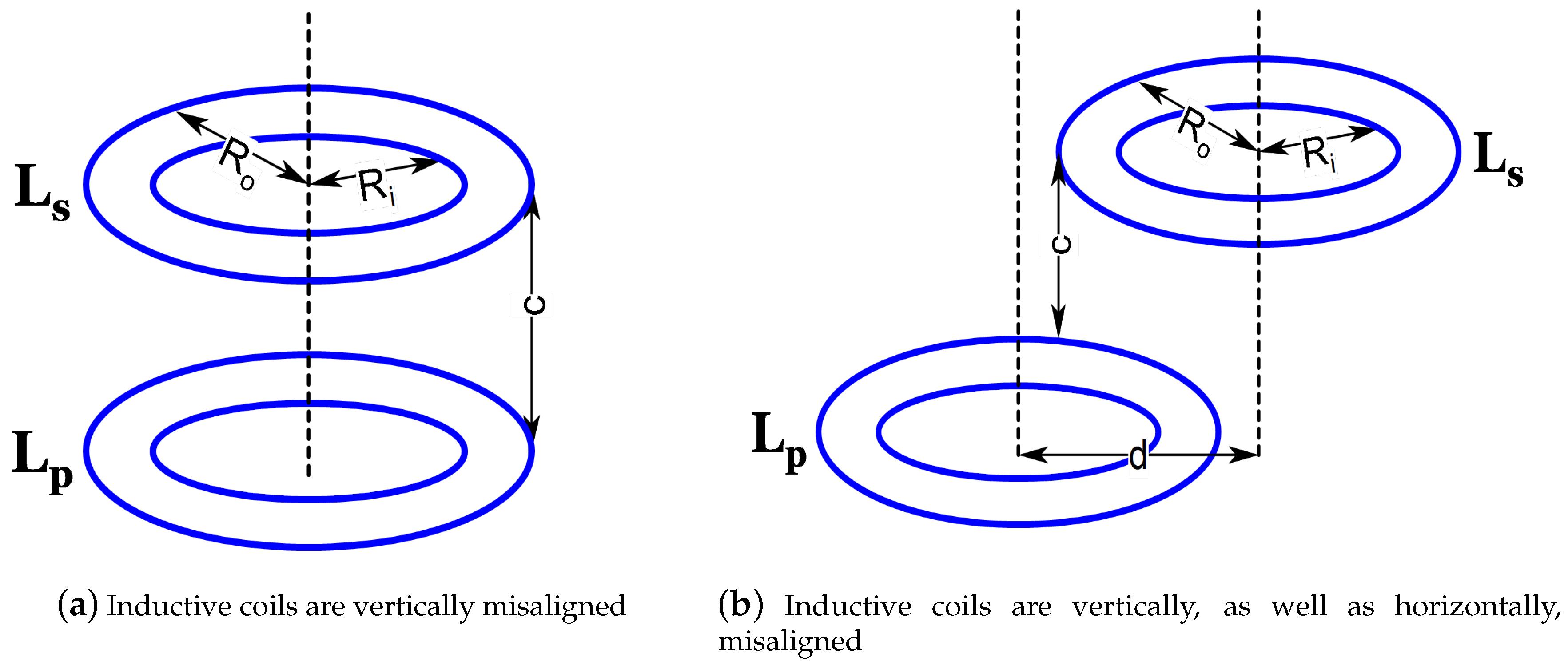
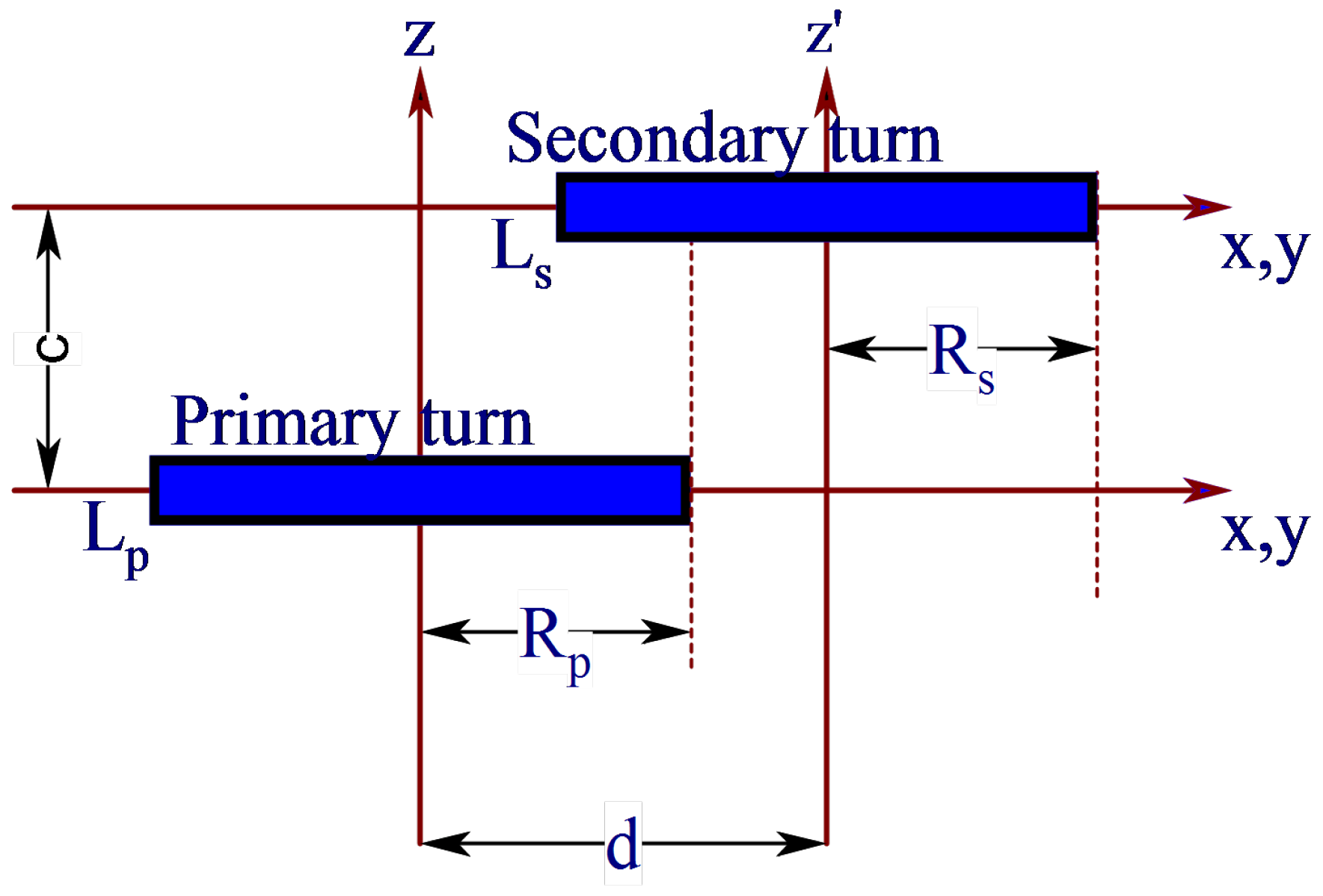
3. Computation of Self and Mutual Inductance
4. Numerical Simulation Results
5. Simulation Studies
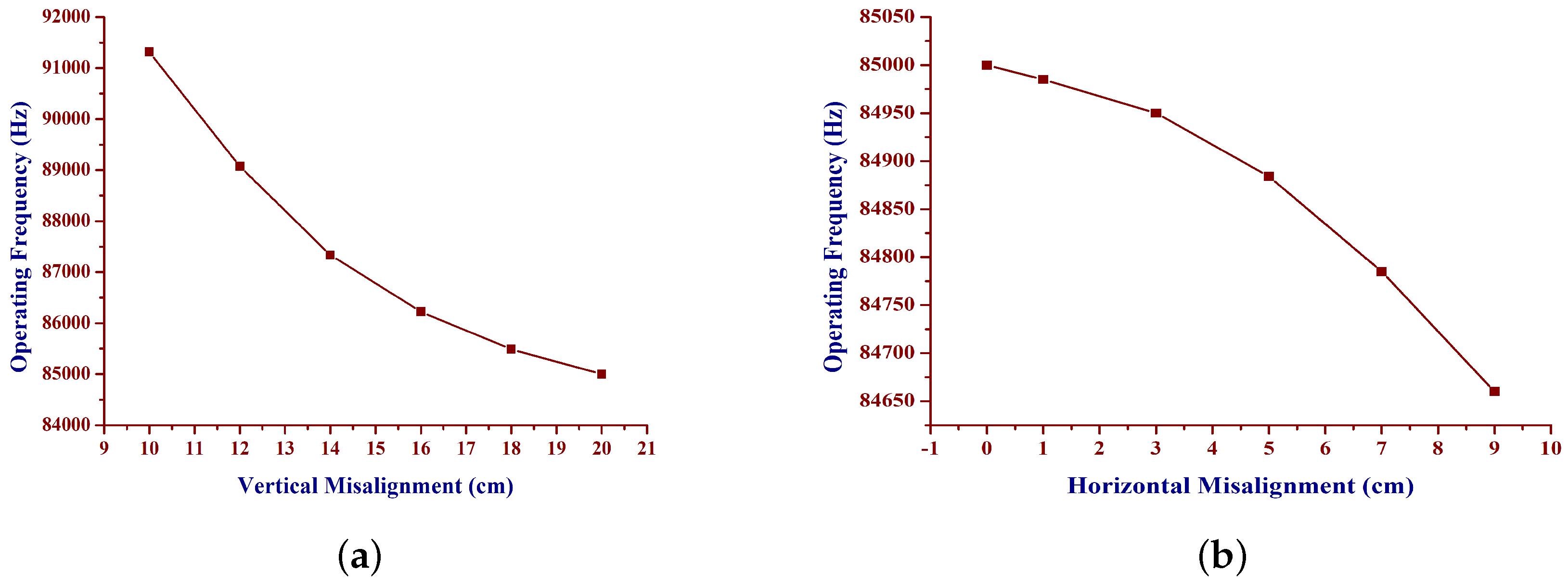
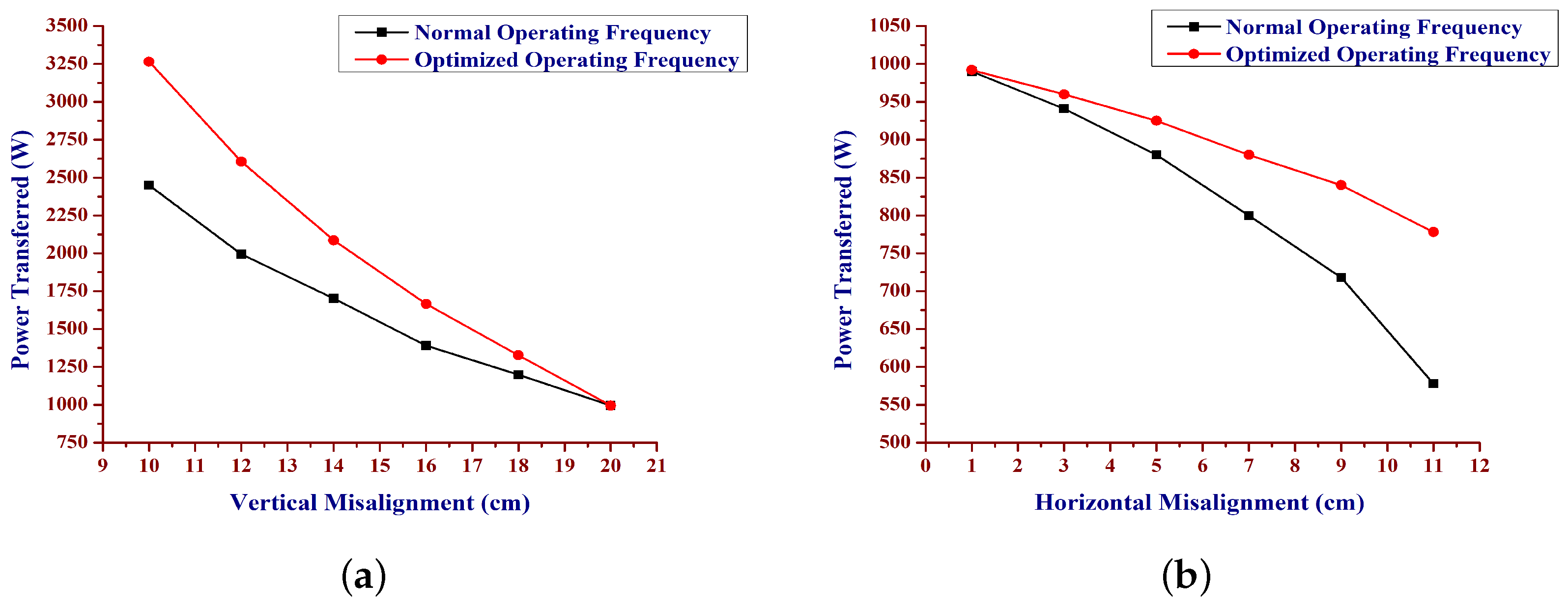
6. Selection of Operating Frequency
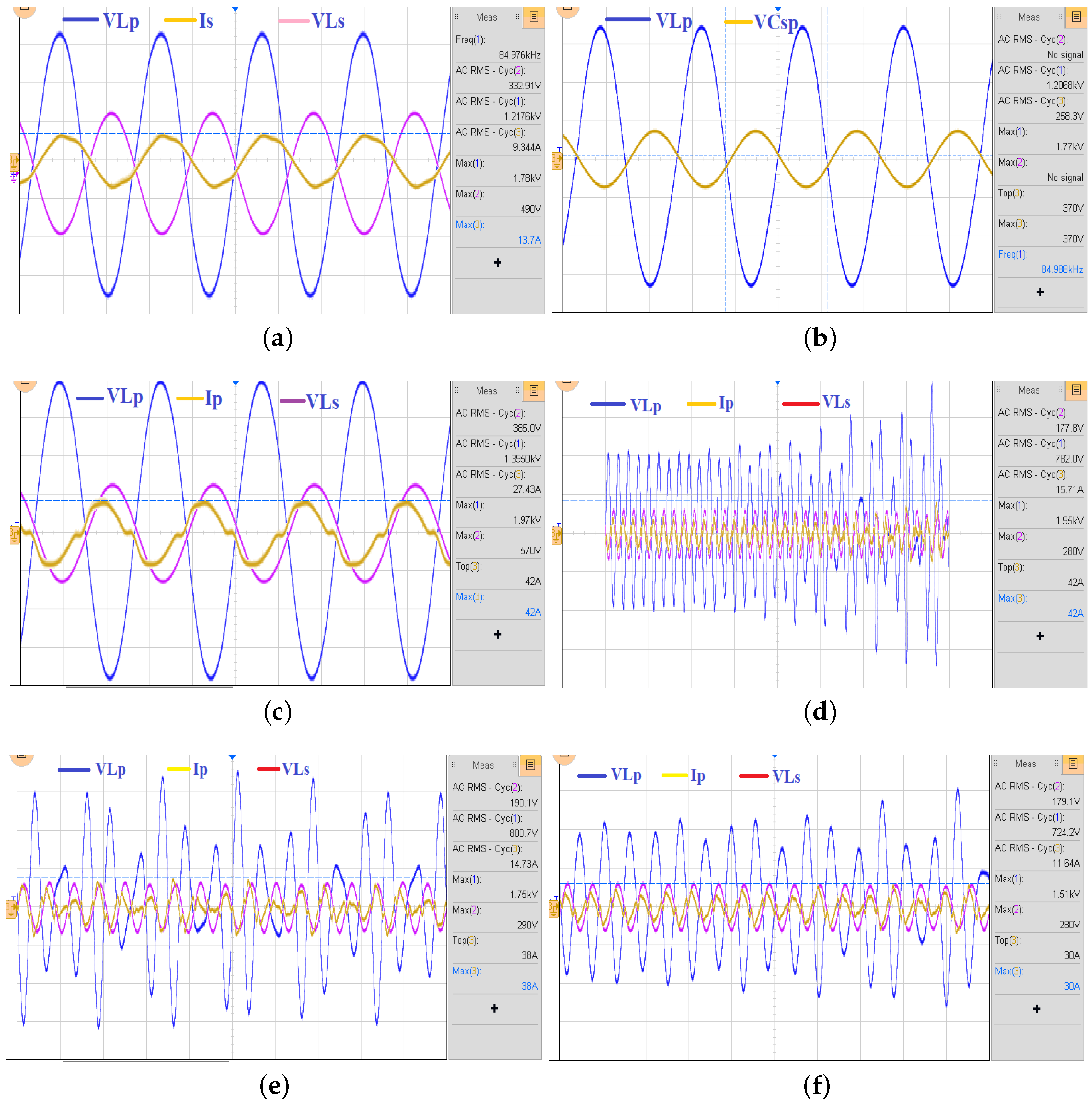
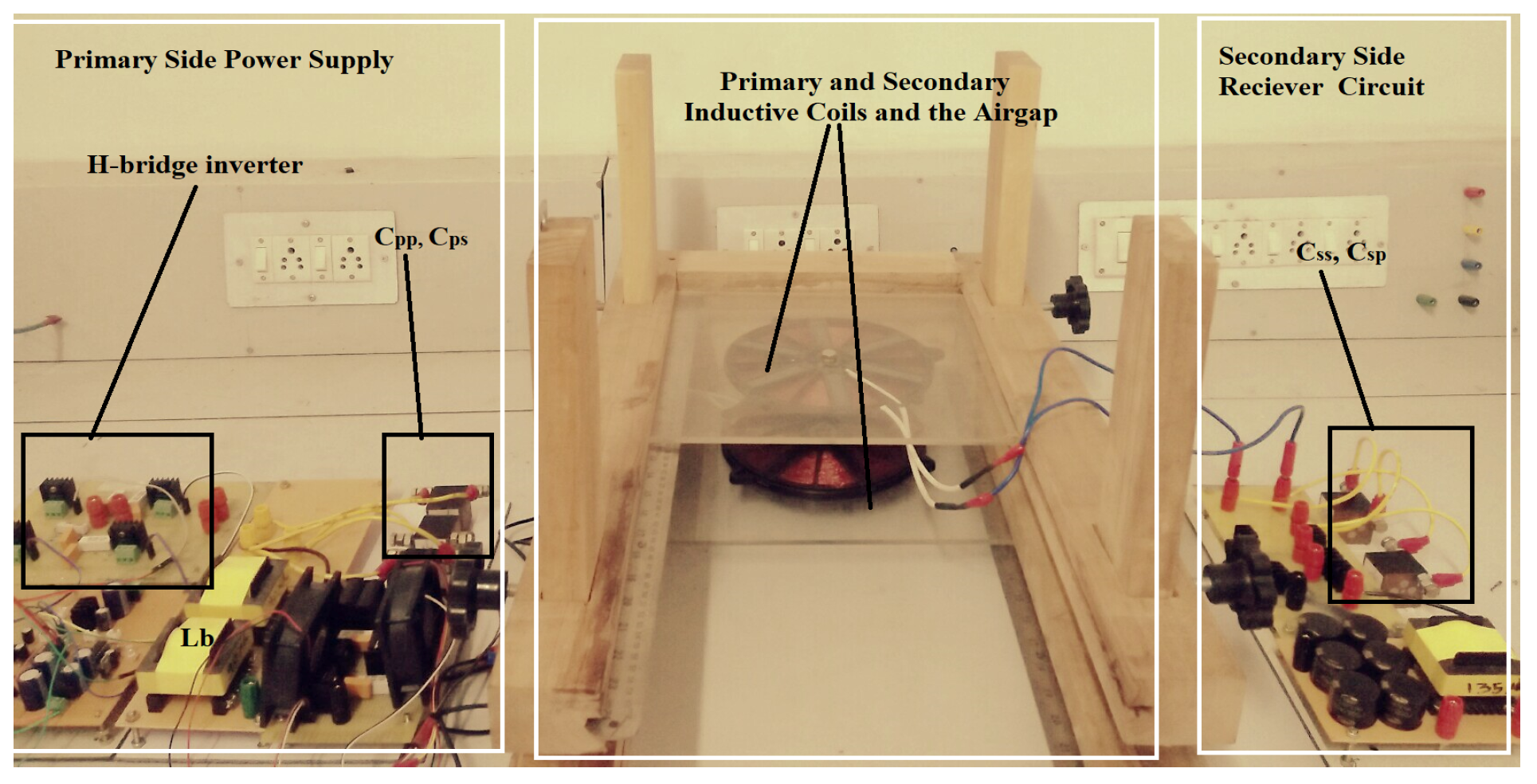
7. Experimental Studies
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| IPT | Inductive power transfer |
| EMF | Electro motive force |
References
- Boys, J.T.; Covic, G.A. The Inductive Power Transfer Story at the University of Auckland. IEEE Circuit Syst. Mag. 2015, 15, 6–27. [Google Scholar] [CrossRef]
- Dai, J.; Ludois, D.C. A Survey of Wireless Power Transfer and a Critical Comparison of Inductive and Capacitive Coupling for Small Gap Applications. IEEE Trans. Power Electron. 2015, 30, 6017–6029. [Google Scholar] [CrossRef]
- Wang, T.; Liu, X.; Jin, N.; Tang, H.; Yang, X.; Ali, M. Wireless Power Transfer for Battery Powering System. Electronics 2018, 7, 281. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in wireless power transfer systems for roadway-powered electric vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 2, 18–36. [Google Scholar] [CrossRef]
- Miller, J.M.; Jones, P.T.; Li, J.; Onar, O.C. ORNL experience and challenges facing dynamic wireless Power charging of EV’s. IEEE Trans. Ind. Inform. 2012, 8, 585–595. [Google Scholar] [CrossRef]
- Esteban, B.; Ahmed, M.S.; Kar, N.C. A comparative study of power supply architectures in wireless EV charging system. IEEE Trans. Power Electron. 2015, 30, 6408–6422. [Google Scholar] [CrossRef]
- Wu, H.H.; Gilchrist, A.; Sealy, K.D.; Bronson, D. A high efficiency 5 kW inductive charger for EVs using dual side control. IEEE Trans. Ind. Inform. 2012, 8, 585–595. [Google Scholar] [CrossRef]
- Wang, Ch.; Stielau, O.H.; Covic, G.A. Design Considerations for a Contactless Electric Vehicle Battery Charger. IEEE Trans. Ind. Electron. 2005, 52, 1308–1314. [Google Scholar] [CrossRef]
- Wang, Ch.; Covic, G.A.; Stielau, O.H. Investigating an LCL load resonant inverter for inductive power transfer applications. IEEE Trans. Power Electon. 2004, 19, 995–1002. [Google Scholar] [CrossRef]
- Imura, T.; Hori, Y. Maximizing air gap and efficiency of magnetic resonant coupling for wireless power transfer using equivalent circuit and Neumann formula. IEEE Trans. Ind. Electron. 2011, 58, 4746–4752. [Google Scholar] [CrossRef]
- Stergiou, C.A.; Zaspalis, V. Impact of ferrite shield properties on the low-power inductive power transfer. IEEE Trans. Mag. 2016, 52, 8401601–8401609. [Google Scholar] [CrossRef]
- Sooraj, V. A study of magnetic coupling and selection of operating frequency for static and dynamic EV charging system. In Proceedings of the 2016 IEEE International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 18–19 March 2016; pp. 1–4. [Google Scholar]
- Vazquez, J.; Roncero-Sanchez, P.; Parreno, A. Simulation Model of a 2-kW IPT Charger with Phase-Shift Control: Validation through the Tuning of the Coupling Factor. Electronics 2018, 7, 255. [Google Scholar] [CrossRef]
- Akyel, S.; Babic, I.; Mahmoudi, M.-M. Mutual inductance calculation for non-coaxial circular air coils with parallel axes. Prog. Electromagn. Res. 2009, 91, 287–301. [Google Scholar] [CrossRef]
- Varikkottil, S.; Daya, J.L.F. High-gain LCL architecture based IPT system for wireless charging of EV. IET Power Electron. 2019, 12, 195–203. [Google Scholar] [CrossRef]
- Houran, M.A.; Yang, X.; Chen, W. Magnetically Coupled Resonance WPT: Review of Compensation Topologies, Resonator Structures with Misalignment, and EMI Diagnostics. Electronics 2018, 7, 296. [Google Scholar] [CrossRef]
- Liu, X.; Jin, N.; Yang, X.; Wang, T.; Hashmi, K.; Tang, H. A Novel Synchronization Technique for Wireless Power Transfer Systems. Electronics 2018, 7, 319. [Google Scholar] [CrossRef]
- Feng, H.; Cai, T.; Duan, S.; Zhao, J.; Zhnag, X.; Chen, C. An LCC compensated resonance converter optimized for robust reaction to large coupling variation in dynamic wireless power transfer. IEEE Trans. Ind. Electron 2016, 63, 6591–6601. [Google Scholar] [CrossRef]
- Luo, B.; Long, T.; Mai, R.; Dai, R.; He, Z.; Li, W. Analysis and design of hybrid inductive and capacitive wireless power transfer for high-power applications. IET. Power Electron 2018, 11, 2263–2270. [Google Scholar] [CrossRef]
- Lu, M.; Ngo, K.D.T. Systematic Design of Coils in Series–Series Inductive Power Transfer for Power Transferability and Efficiency. IEEE Trans. Power Electron 2018, 33, 3333–3345. [Google Scholar] [CrossRef]
- Moghaddami, M.; Sarwat, A.I. Single-Phase Soft-Switched AC–AC Matrix Converter With Power Controller for Bidirectional Inductive Power Transfer Systems. IEEE Trans. Ind. Appl. 2018, 54, 3760–3770. [Google Scholar] [CrossRef]
- Hou, J.; Chen, Q.; Zhang, Z.; Wong, Si.; Tse, C.K. Analysis of Output Current Characteristics for Higher Order Primary Compensation in Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2018, 33, 6807–6821. [Google Scholar] [CrossRef]
- Kamineni, A.; Covic, G.A.; Boys, J.T. Analysis of Coplanar Intermediate Coil Structures in Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2015, 30, 6141–6154. [Google Scholar] [CrossRef]
- Babic, S.I.; Akyel, C. New analytic-numerical solutions for the mutual inductance of two coaxial circular coils with rectangular cross section in air. IEEE Trans. Magn. 2006, 42, 1661–1669. [Google Scholar] [CrossRef]
- Khan, S.R.; Pavuluri, S.K.; Desmulliez, M.P.Y. Accurate Modeling of Coil Inductance for Near-Field Wireless Power Transfer. IEEE Trans. Microw. Theory Tech. 2018, 66, 4158–4169. [Google Scholar] [CrossRef]
- Gao, Y.; Ginart, A.; Duan, C.; Farley, K.B.; Tse, Z.T.H. Simple approach to calculate unity-gain frequency of series–series compensated inductive power transfer. IET Electron. Lett. 2016, 52, 145–146. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power, P | 1 kW |
| Operating frequency, f | 85 kHz |
| Primary Inductance, | 110 H |
| Secondary Inductance, | 110 H |
| Minimum coupling coefficient, | 0.08 |
| Controller | Texas Delfino (TMS320F28377S) |
| MOSFET | SPW47N60C3 |
| Diode | MUR1560G |
| Capacitor, | 50 nF |
| Capacitor, | 85 nF |
| Capacitor, | 53.2 nF |
| Capacitor, | 85 nF |
| Capacitor, | 2200 F |
| Inductor, | 135H |
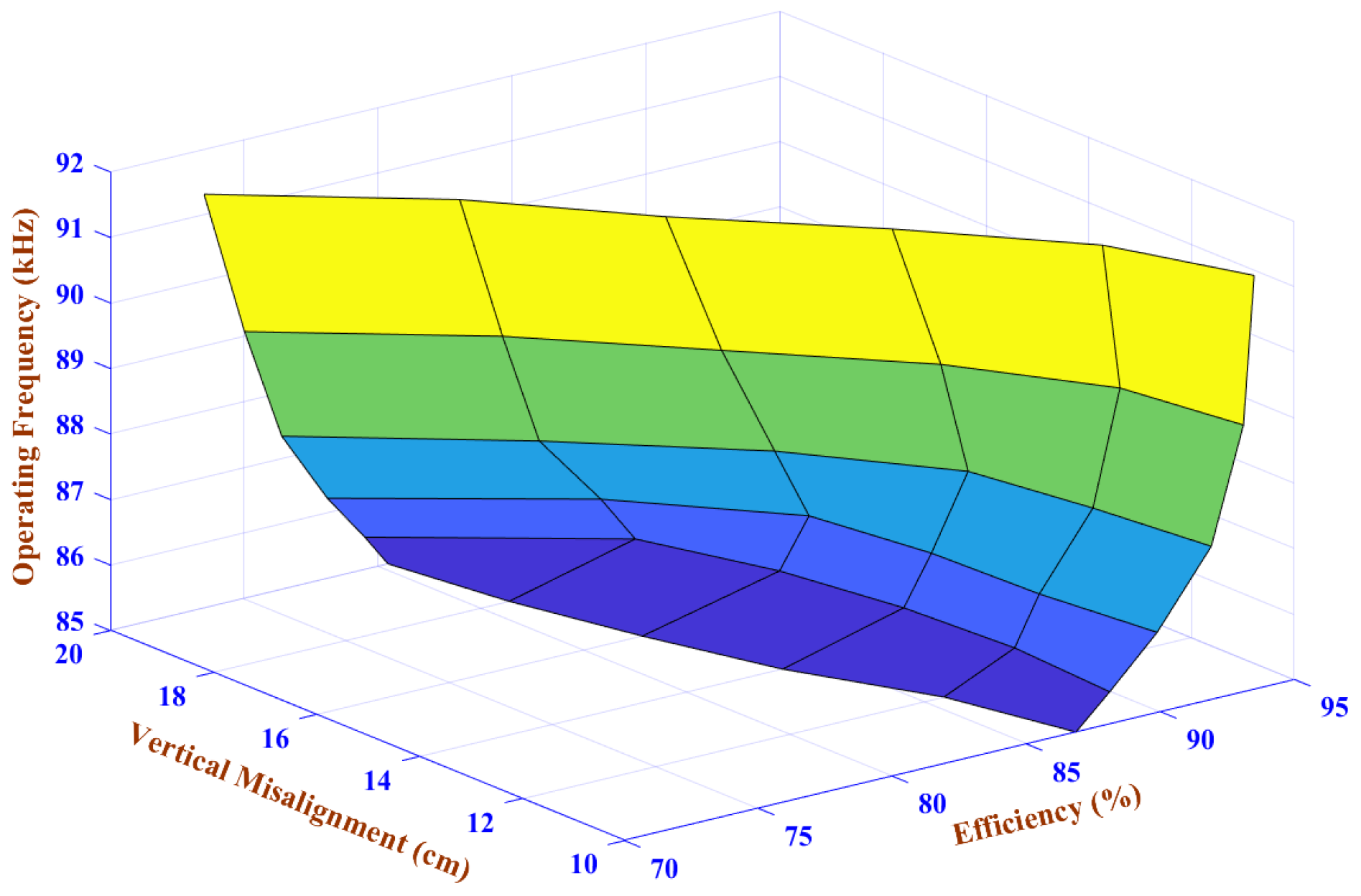
| Vertical | Efficiency % | |||||
|---|---|---|---|---|---|---|
| Misalignment (cm) | f = 91,315 Hz | f = 89,070 Hz | f = 87,337 Hz | f = 86,223 Hz | f = 85,990 Hz | f = 85,000 Hz |
| 20 | 73.5 | 75.01 | 76.4 | 78.1 | 79.5 | 80.36 |
| 18 | 79.2 | 80.8 | 82.17 | 84.47 | 85.75 | 81.05 |
| 16 | 83.05 | 85.14 | 87.12 | 88.4 | 87.3 | 82.18 |
| 14 | 87.67 | 89.48 | 90.5 | 89.13 | 88.1 | 83.57 |
| 12 | 91.68 | 92.33 | 91.32 | 89.32 | 88.40 | 85.76 |
| 10 | 93.5 | 93.1 | 91.9 | 89.88 | 88.11 | 86.85 |
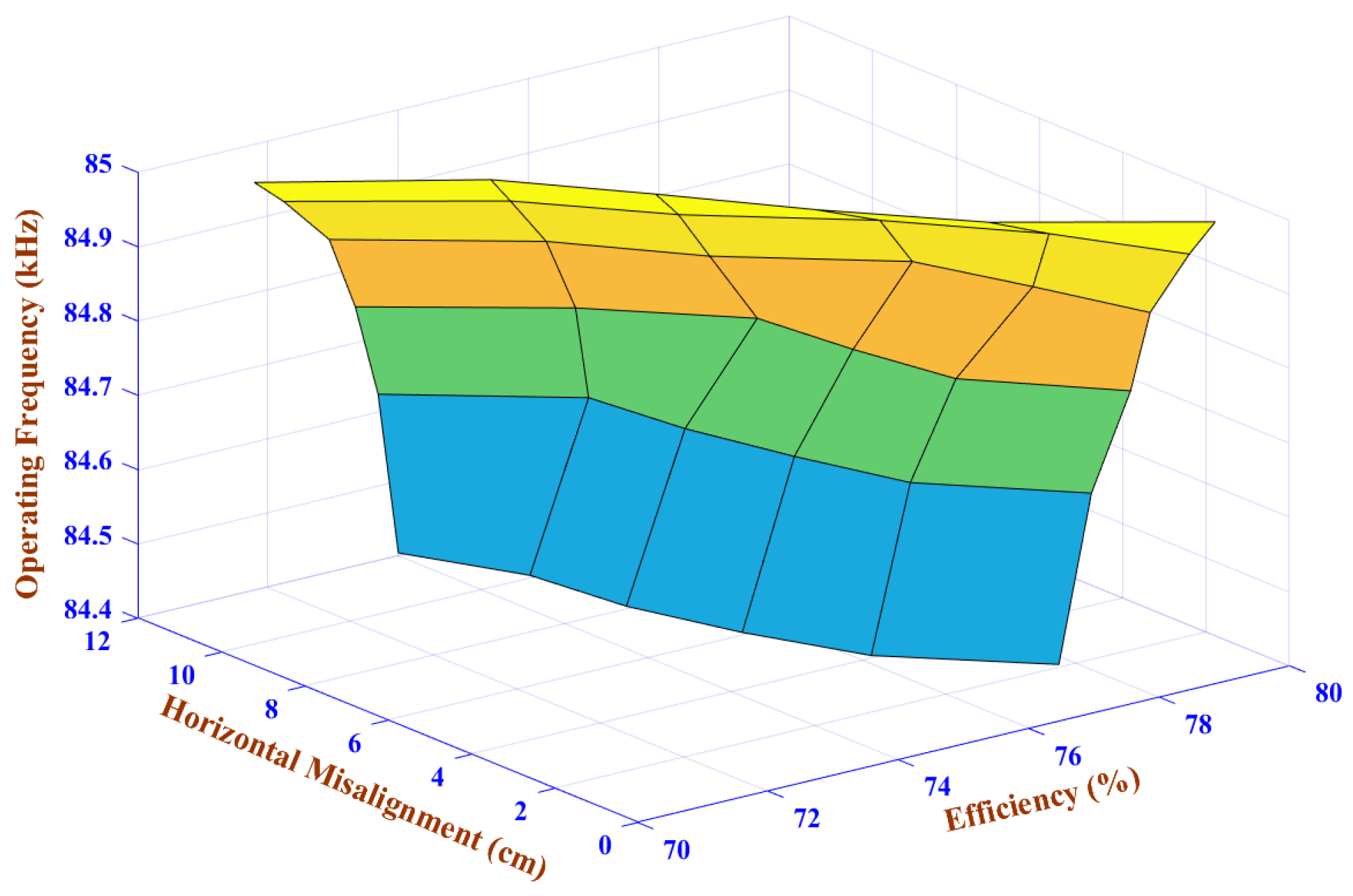
| Horizontal | Efficiency % | |||||
|---|---|---|---|---|---|---|
| Misalignment (cm) | f = 84,985 Hz | f = 84,950 Hz | f = 84,884 Hz | f = 84,785 Hz | f = 84,660 Hz | f = 84,440 Hz |
| 1 | 79.5 | 79.1 | 78.5 | 78.2 | 77.6 | 77.1 |
| 3 | 77.3 | 78.23 | 77.98 | 76.8 | 76.1 | 75.5 |
| 5 | 75.93 | 76.91 | 77.41 | 76.5 | 75.6 | 74.8 |
| 7 | 74.75 | 75.1 | 75.58 | 76.31 | 75.2 | 74.3 |
| 9 | 73.5 | 73.8 | 74.35 | 74.8 | 75 | 74.1 |
| 11 | 71.15 | 71.6 | 72.3 | 72.7 | 73.05 | 73.36 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Varikkottil, S.; J. L, F.D. Estimation of Optimal Operating Frequency for Wireless EV Charging System under Misalignment. Electronics 2019, 8, 342. https://doi.org/10.3390/electronics8030342
Varikkottil S, J. L FD. Estimation of Optimal Operating Frequency for Wireless EV Charging System under Misalignment. Electronics. 2019; 8(3):342. https://doi.org/10.3390/electronics8030342
Chicago/Turabian StyleVarikkottil, Sooraj, and Febin Daya J. L. 2019. "Estimation of Optimal Operating Frequency for Wireless EV Charging System under Misalignment" Electronics 8, no. 3: 342. https://doi.org/10.3390/electronics8030342
APA StyleVarikkottil, S., & J. L, F. D. (2019). Estimation of Optimal Operating Frequency for Wireless EV Charging System under Misalignment. Electronics, 8(3), 342. https://doi.org/10.3390/electronics8030342