Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station

 ,
,
Abstract
:1. Introduction
1.1. Background
1.2. Related Works
1.3. Contributions
2. Problem Formulation and Constrained Cramér–Rao Bound (CCRB)
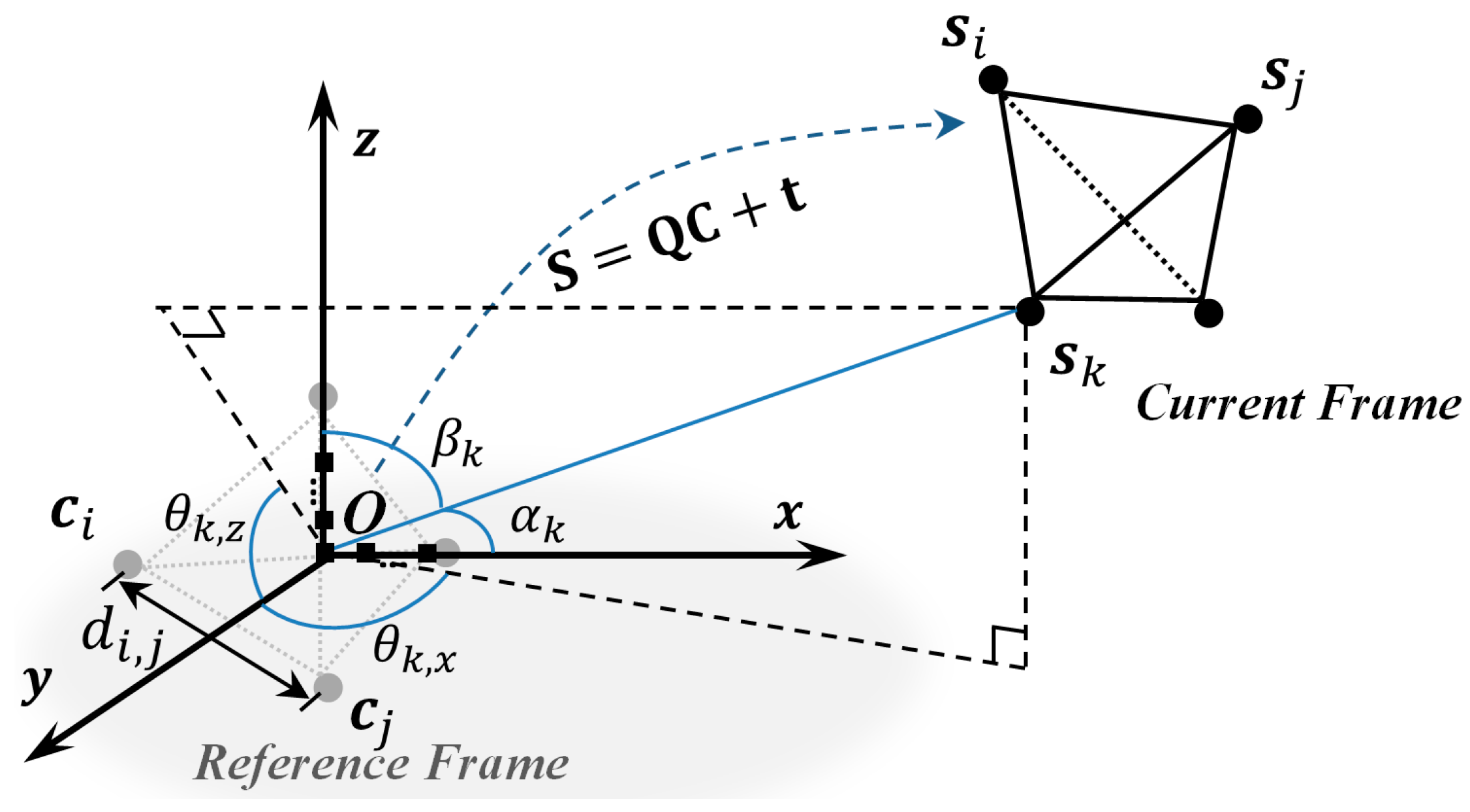
2.1. Rigid Body Localization (RBL) Based on Direction of Arrival (DoA) Measurements from a Single Base Station (BS)
2.2. CCRB
3. Proposed RBL Algorithms
3.1. Observation Matching (OM) Approach
3.2. Topology Matching (TM) with Refinement
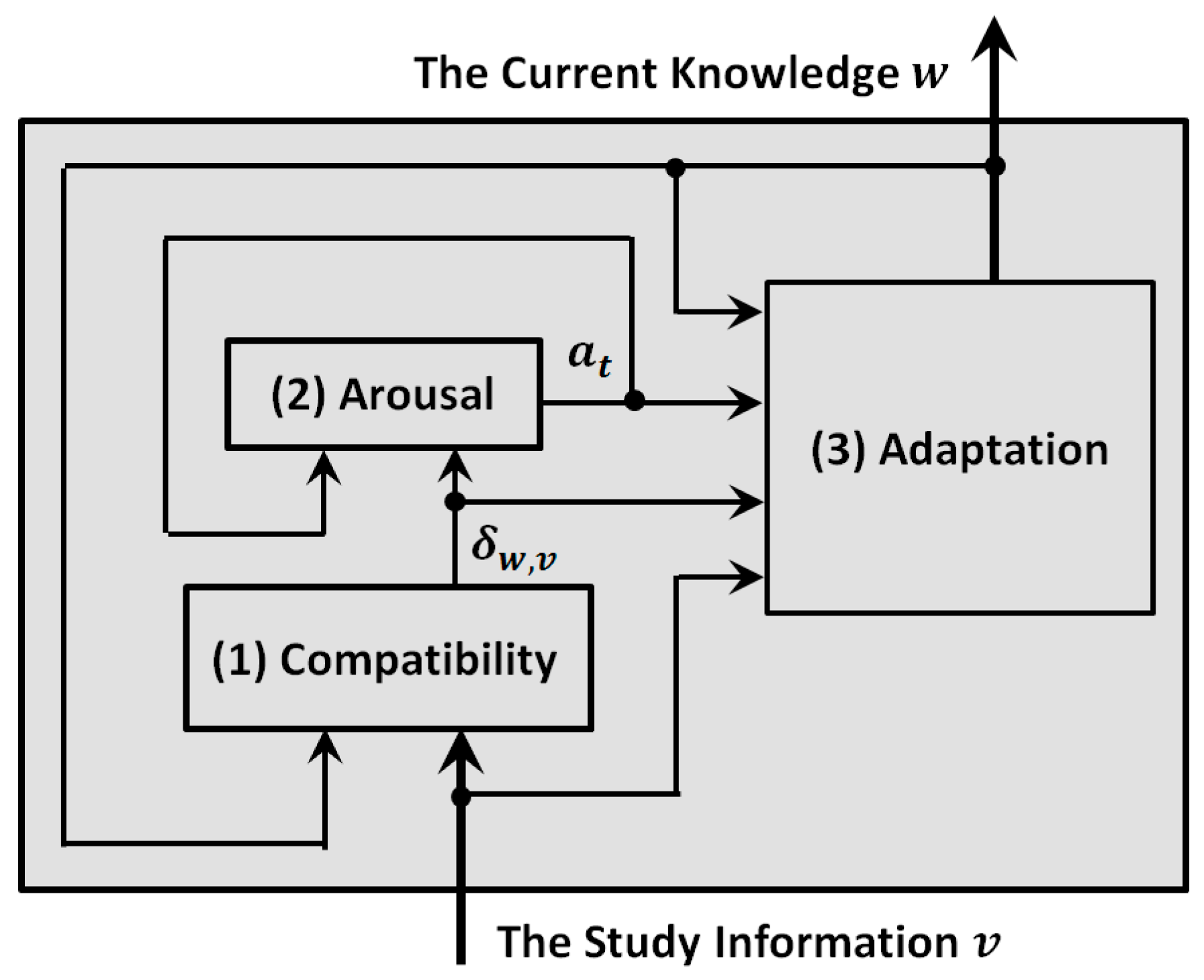
4. Solving (18) and (22) Using a Participatory Searching Algorithm (PSA)
| Algorithm 1 Participatory Search Algorithm (PSA) |
| Initialization: Randomly set in the restricted area; ; ; is the fitness (objective) function. |
| do |
| Randomly generate individuals in the restricted area and form individuals: . Each individual contains unknowns; |
| Update with ; |
| Pairing: |
| For each individual , find its mate by |
| , ; |
| Let ; |
| for |
| Selection: |
| if then ; |
| else ; end if |
| Recombination: |
| Choose randomly; |
| Compute ; |
| Generate offspring ; |
| Mutation: |
| Get |
| if then ; end if |
| if then ; end if |
| end |
| ; |
| while |
| return |
5. Performance Evaluation
5.1. Simulation Setup
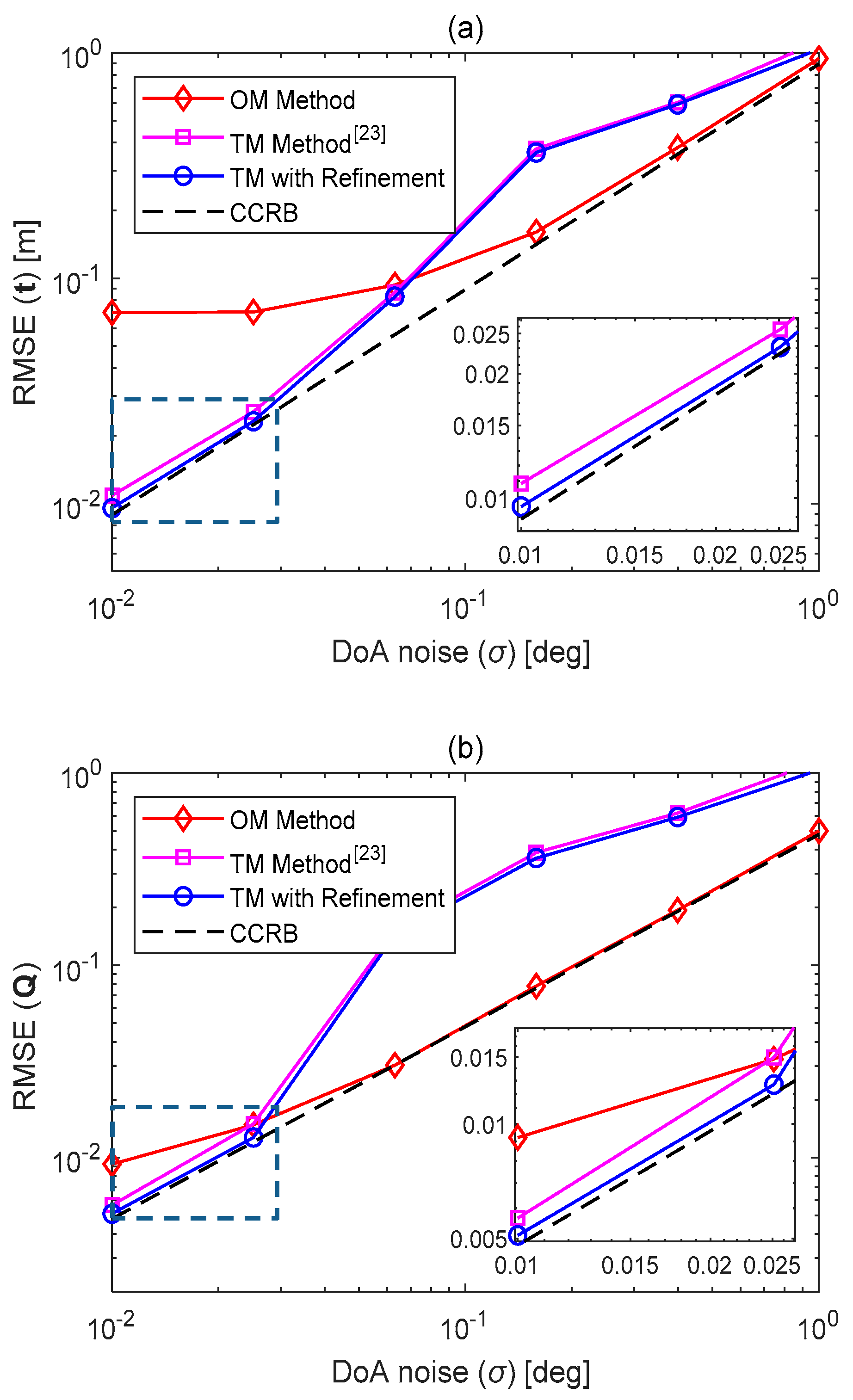
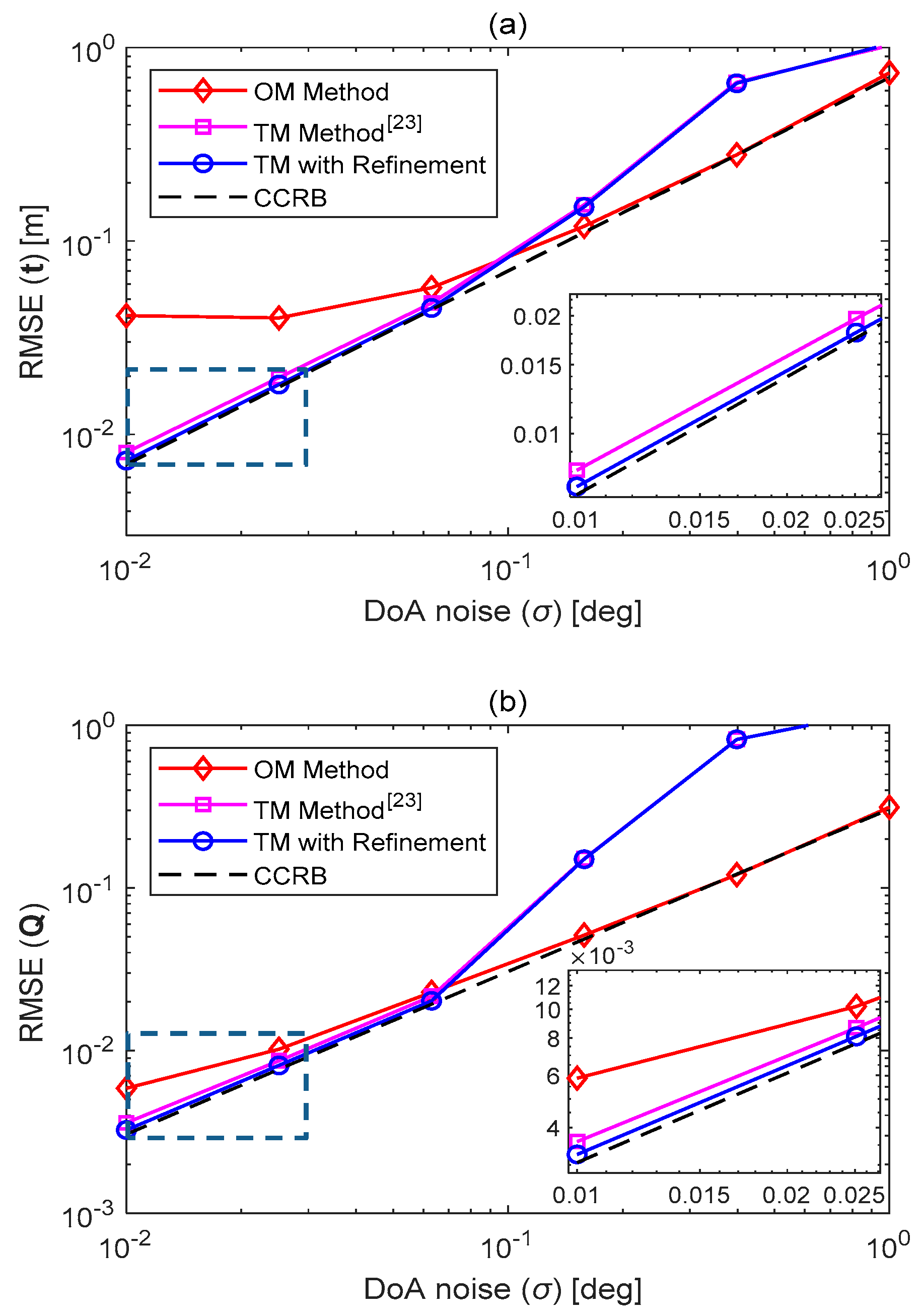
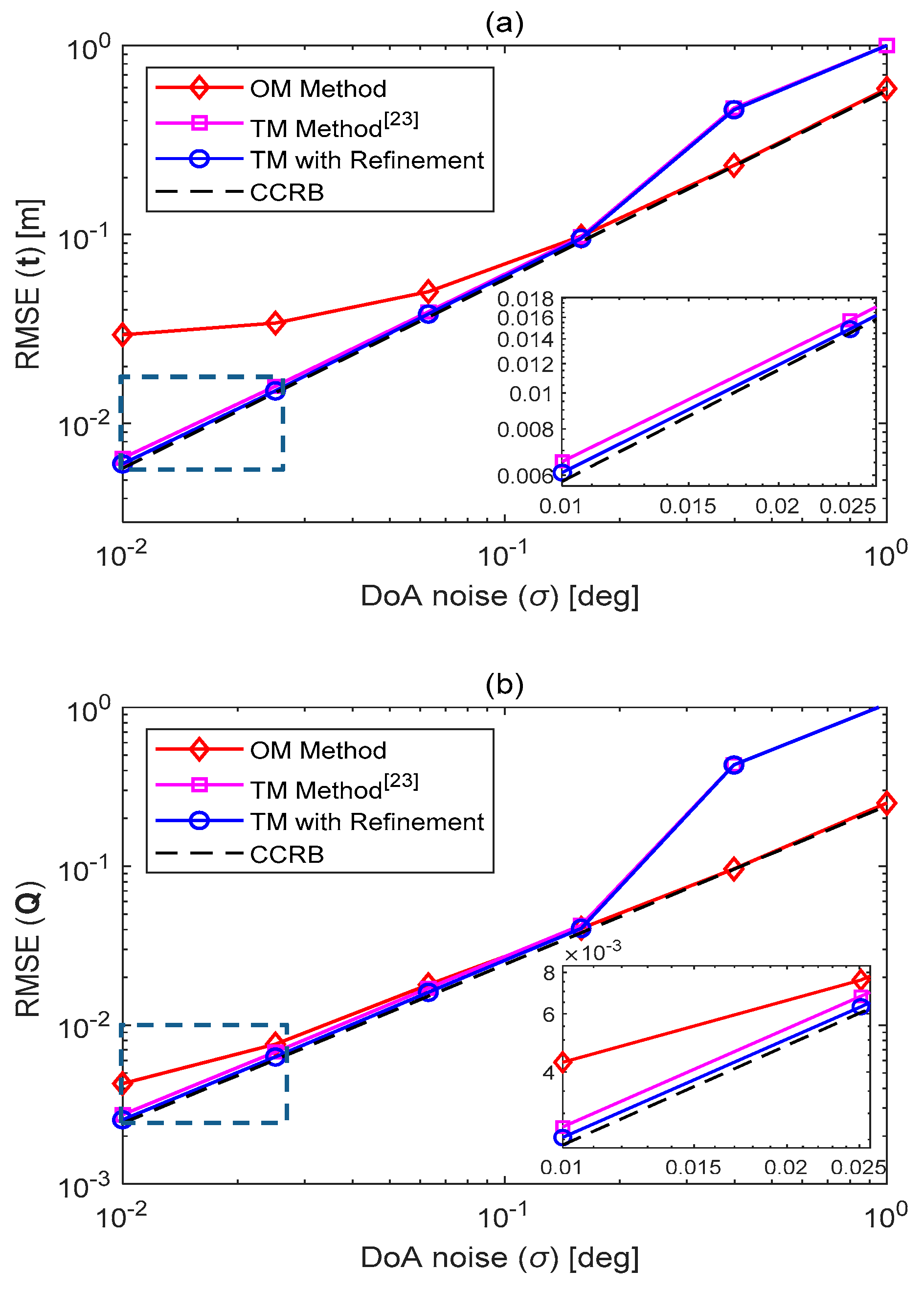
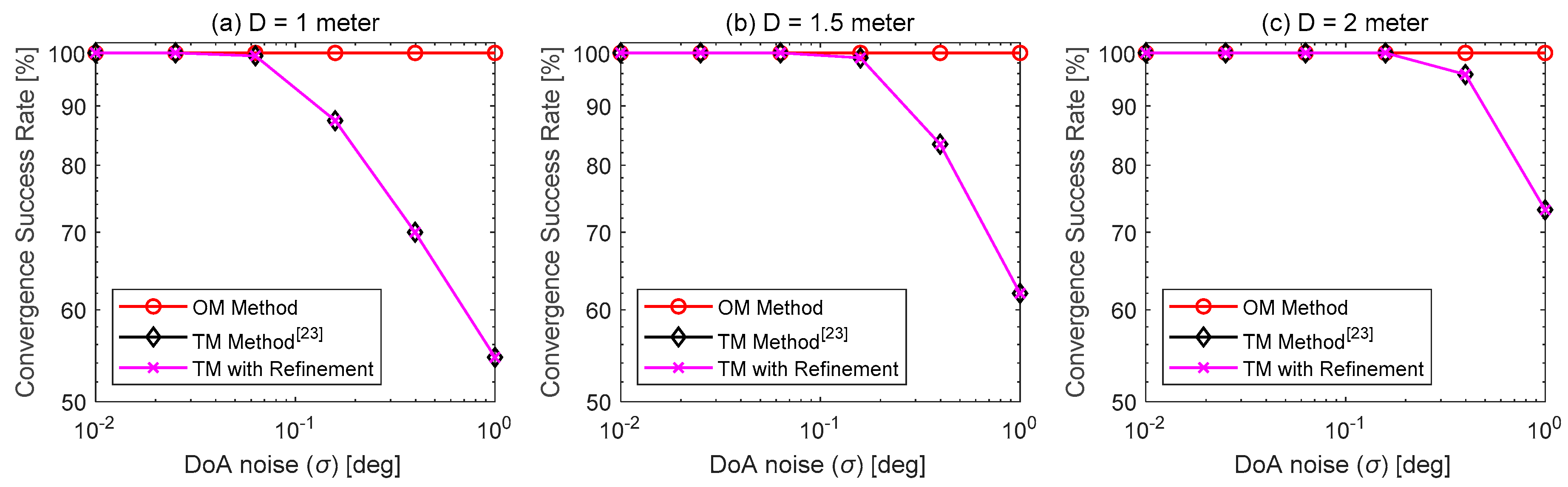
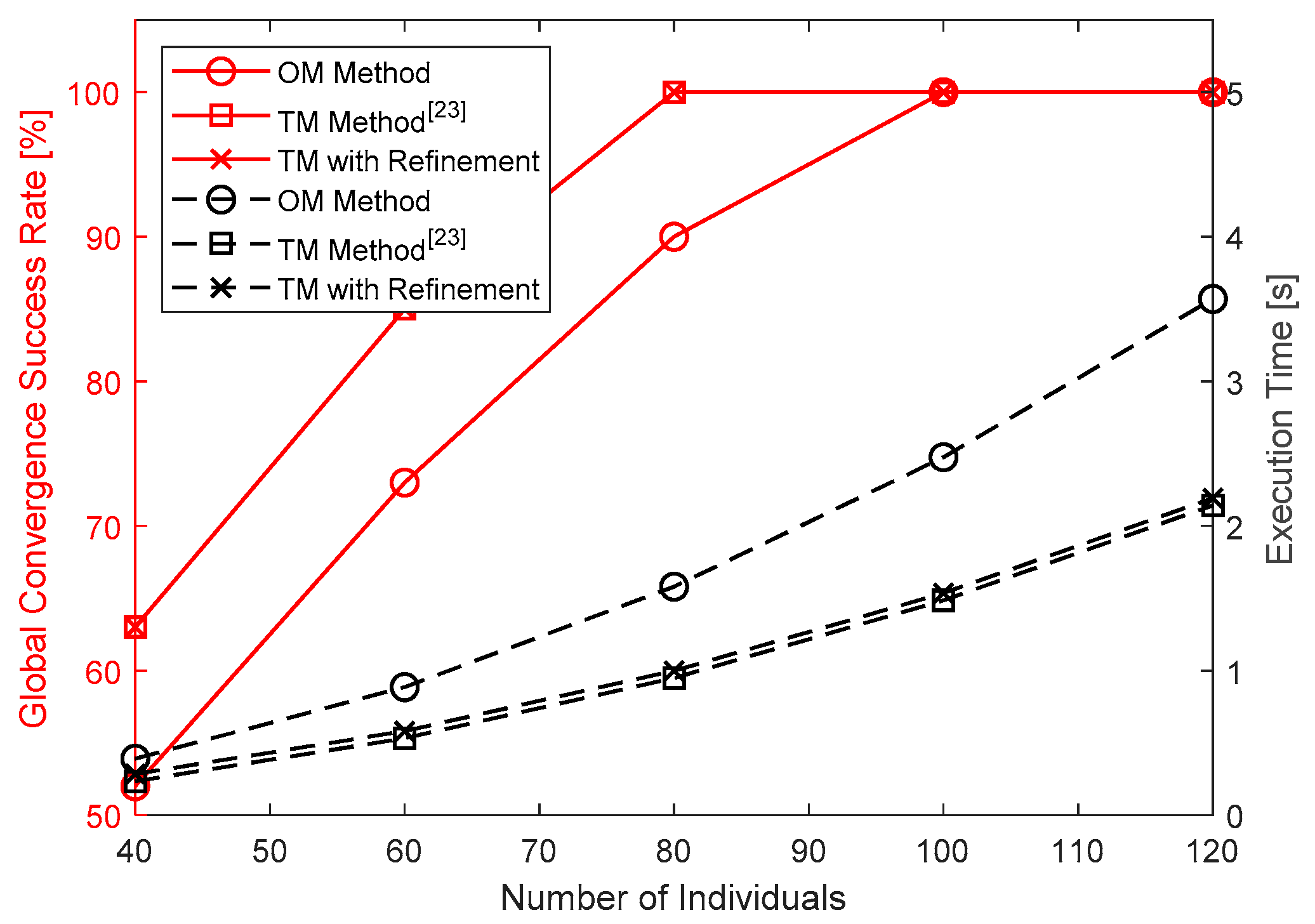
5.2. Simulation Results Evaluation
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Featherstone, R. Robot Dynamics Algorithms; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- From, P.J.; Gravdahl, J.T.; Pettersen, K.Y. Rigid Body Dynamics, Vehicle-Manipulator Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 191–227. [Google Scholar]
- Garcia-Nieto, S.; Velasco-Carrau, J.; Paredes-Valles, F.; Salcedo, J.V.; Simarro, R. Motion Equations and Attitude Control in the Vertical Flight of a VTOL Bi-Rotor UAV. Electronics 2019, 8, 208. [Google Scholar] [CrossRef]
- Sauer, J.; Schömer, E. A Constraint-Based Approach to Rigid Body Dynamics for Virtual Reality Applications. In Proceedings of the ACM symposium on Virtual Reality Software and Technology, Taipei, Taiwan, 2–5 November 1998; pp. 153–162. [Google Scholar]
- Hua, M.D. Attitude estimation for accelerated vehicles using GPS/INS measurements. Control Eng. Pr. 2010, 18, 723–732. [Google Scholar] [CrossRef]
- Liu, C.; Yang, L.; Mihaylova, L. Dual-satellite source geolocation with time and frequency offsets and satellite location errors. In Proceedings of the 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–8. [Google Scholar]
- Liu, L.; Zhang, X.; Chen, P. Compressed Sensing-Based DoA Estimation with Antenna Phase Errors. Electronics 2019, 8, 294. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, N. An Enhanced 3D Positioning Scheme Exploiting Adaptive Pulse Selection for Indoor LOS Environments. Wirel. Pers. Commun. 2014, 77, 2537–2548. [Google Scholar] [CrossRef]
- Namvar, M.; Safaei, F. Adaptive Compensation of Gyro Bias in Rigid-Body Attitude Estimation Using a Single Vector Measurement. IEEE Trans. Autom. Control 2013, 58, 1816–1822. [Google Scholar] [CrossRef]
- Wu, Y.; Shi, W. On Calibration of Three-Axis Magnetometer. IEEE Sens. J. 2015, 15, 6424–6431. [Google Scholar] [CrossRef] [Green Version]
- Wu, Z.; Yao, M.; Ma, H.; Jia, W. Improving Accuracy of the Vehicle Attitude Estimation for Low-Cost INS/GPS Integration Aided by the GPS-Measured Course Angle. IEEE Trans. Intell. Transp. Syst. 2013, 14, 553–564. [Google Scholar] [CrossRef]
- Zhu, J.; Li, T.; Wang, J.; Hu, X.; Wu, M. Rate-gyro-integral constraint for ambiguity resolution in GNSS attitude determination applications. Sensors 2013, 13, 7979–7999. [Google Scholar] [CrossRef]
- Peng, H.M.; Chang, E.R.; Wang, L.S. Rotation method for direction finding via GPS carrier phases. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 72–84. [Google Scholar] [CrossRef]
- Natraj, A.; Ly, D.S.; Eynard, D.; Demonceaux, C.; Vasseur, P. Omnidirectional vision for UAV: Applications to attitude, motion and altitude estimation for day and night conditions. J. Intell. Robot. Syst. 2013, 69, 459–473. [Google Scholar] [CrossRef]
- Serra, P.; Cunha, R.; Hamel, T.; Cabecinhas, D.; Silvestre, C. Landing of a Quadrotor on a Moving Target Using Dynamic Image-Based Visual Servo Control. IEEE Trans. Robot. 2016, 32, 1524–1535. [Google Scholar] [CrossRef]
- Eggert, D.W.; Lorusso, A.; Fisher, R.B. Estimating 3-D Rigid Body Transformations: A Comparison of Four Major Algorithms. Mach. Vis. Appl. 1997, 9, 272–290. [Google Scholar] [CrossRef]
- Pizzo, A.; Chepuri, S.P.; Leus, G. Towards Multi-rigid Body Localization. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3166–3170. [Google Scholar]
- Chepuri, S.P.; Leus, G.; van der Veen, A.-J. Rigid Body Localization Using Sensor Networks. IEEE Trans. Signal Process. 2014, 62, 4911–4924. [Google Scholar] [CrossRef]
- Chen, S.; Ho, K.C. Accurate Localization of A Rigid Body Using Multiple Sensors and Landmarks. IEEE Trans. Signal Process. 2015, 63, 6459–6472. [Google Scholar] [CrossRef]
- Jiang, J.; Wang, G.; Ho, K.C. Accurate Rigid Body Localization via Semi-definite Relaxation Using Range Measurements. IEEE Signal Process. Lett. 2018, 25, 378–382. [Google Scholar] [CrossRef]
- Jiang, J.; Wang, G.; Ho, K.C. Sensor Network-Based Rigid Body Localization via Semi-Definite Relaxation Using Arrival Time and Doppler Measurements. IEEE Trans. Wirel. Commun. 2019, 18, 1011–1025. [Google Scholar] [CrossRef]
- Zhou, B.; Jing, C.; Kim, Y. Joint ToA/AOA Positioning Scheme with IP-OFDM Systems. Wirel. Pers. Commun. 2014, 75, 261–271. [Google Scholar] [CrossRef]
- Zhou, B.; Ai, L.; Dong, X.; Yang, L. DoA-Based Rigid Body Localization Adopting Single Base Station. IEEE Commun. Lett. 2019, 23, 494–497. [Google Scholar] [CrossRef]
- Liu, Y.L.; Gomide, F. A Participatory Search Algorithm. In Evolutionary Intelligence; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Diebel, J. Representing attitude: Euler angles, unit quaternions, and rotation vectors. Matrix 2006, 58, 15–16. [Google Scholar]
- Sun, M.; Yang, L.; Guo, F. Improving noisy sensor positions using accurate inter-sensor range measurements. Signal Process. 2014, 94, 138–143. [Google Scholar] [CrossRef]
- Gu, J.F.; Zhu, W.P.; Swamy, M.N.S. Joint 2-D DoA estimation via sparse L-shaped array. IEEE Trans. Signal Process. 2015, 63, 1171–1182. [Google Scholar] [CrossRef]
- Meng, D.; Wang, X.; Huang, M.; Shen, C.; Bi, G. Weighted Block Sparse Recovery Algorithm for High Resolution DoA Estimation with Unknown Mutual Coupling. Electronics 2018, 7, 217. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Stoica, P.; Ng, B.C. On the Cramér-Rao bound under parametric constraints. IEEE Signal Process. Lett. 1998, 5, 177–179. [Google Scholar] [CrossRef]
- Cox, T.; Cox, M. Multidimensional Scaling; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Yager, R.R. A model of participatory learning. IEEE Trans. Syst. Man Cybern. 1990, 20, 1229–1234. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise | |||
|---|---|---|---|
| Size | |||
| 11.3/8.7 (1.14 dB) 1 | 26.6/22.3 (0.77 dB) | ||
| 8.7/7.3 (0.76 dB) | 20.9/16.4 (1.05 dB) | ||
| 7.3/6.5 (0.50 dB) | 17.6/15.2 (0.64 dB) | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.; Yao, X.; Yang, L.; Yang, S.; Wu, S.; Kim, Y.; Ai, L. Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics 2019, 8, 622. https://doi.org/10.3390/electronics8060622
Zhou B, Yao X, Yang L, Yang S, Wu S, Kim Y, Ai L. Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics. 2019; 8(6):622. https://doi.org/10.3390/electronics8060622
Chicago/Turabian StyleZhou, Biao, Xiaofeng Yao, Le Yang, Shangyi Yang, Shaojie Wu, Youngok Kim, and Lingyu Ai. 2019. "Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station" Electronics 8, no. 6: 622. https://doi.org/10.3390/electronics8060622
APA StyleZhou, B., Yao, X., Yang, L., Yang, S., Wu, S., Kim, Y., & Ai, L. (2019). Accurate Rigid Body Localization Using DoA Measurements from a Single Base Station. Electronics, 8(6), 622. https://doi.org/10.3390/electronics8060622