A Novel Left-Turn Signal Control Method for Improving Intersection Capacity in a Connected Vehicle Environment


Abstract
:1. Introduction
2. Literature Review
3. The New Intersection Signal Control Model and Control Principle
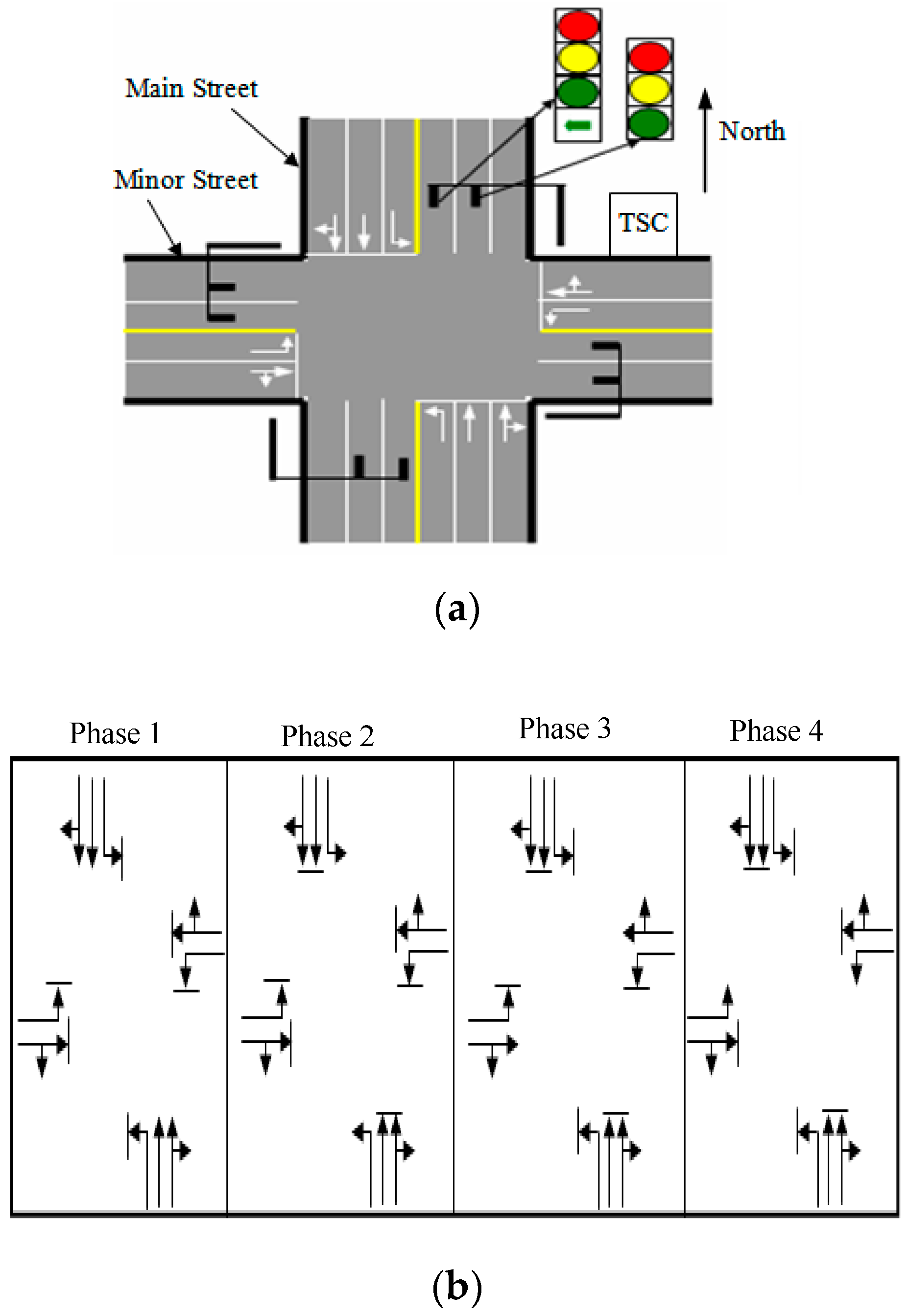
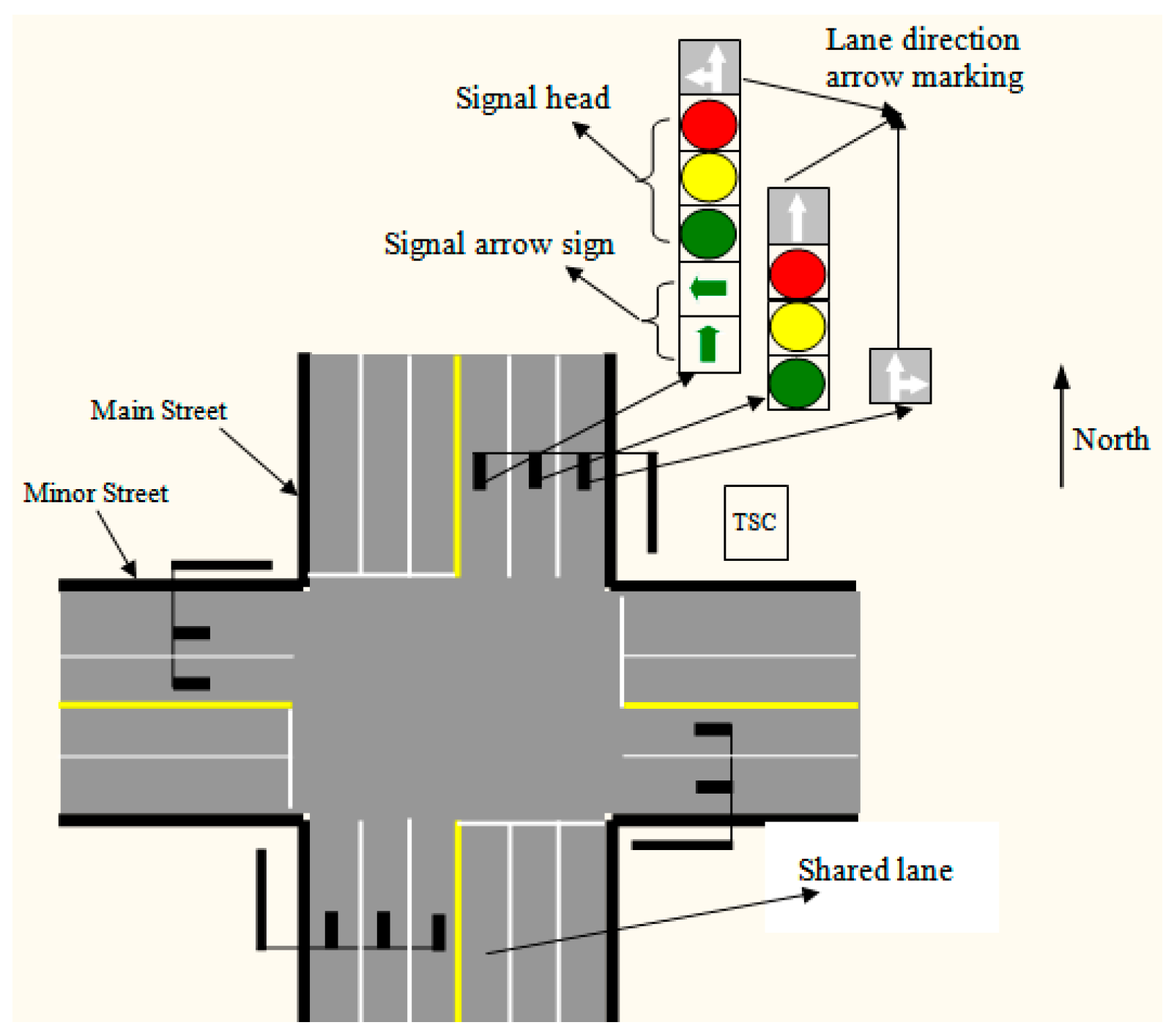
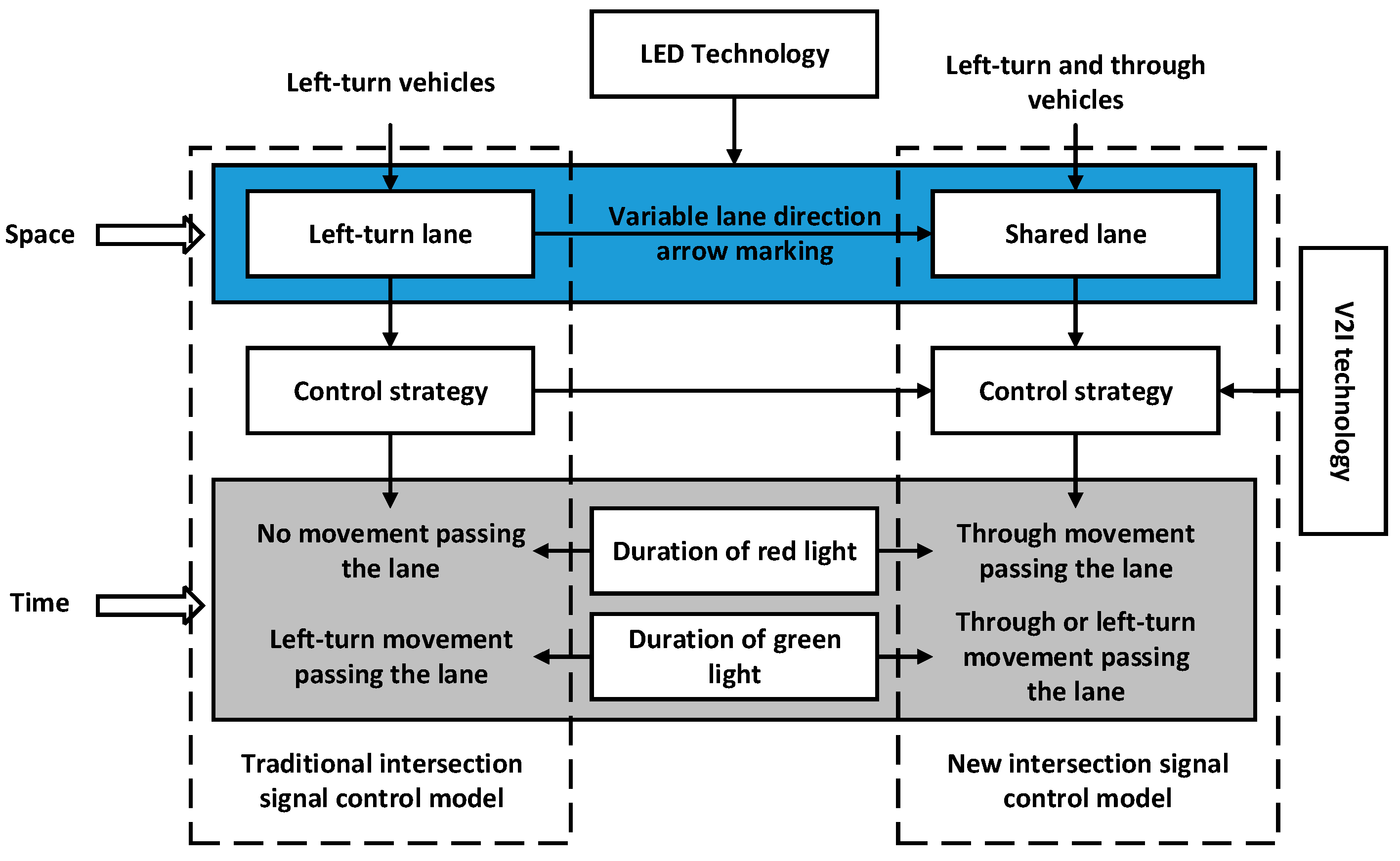
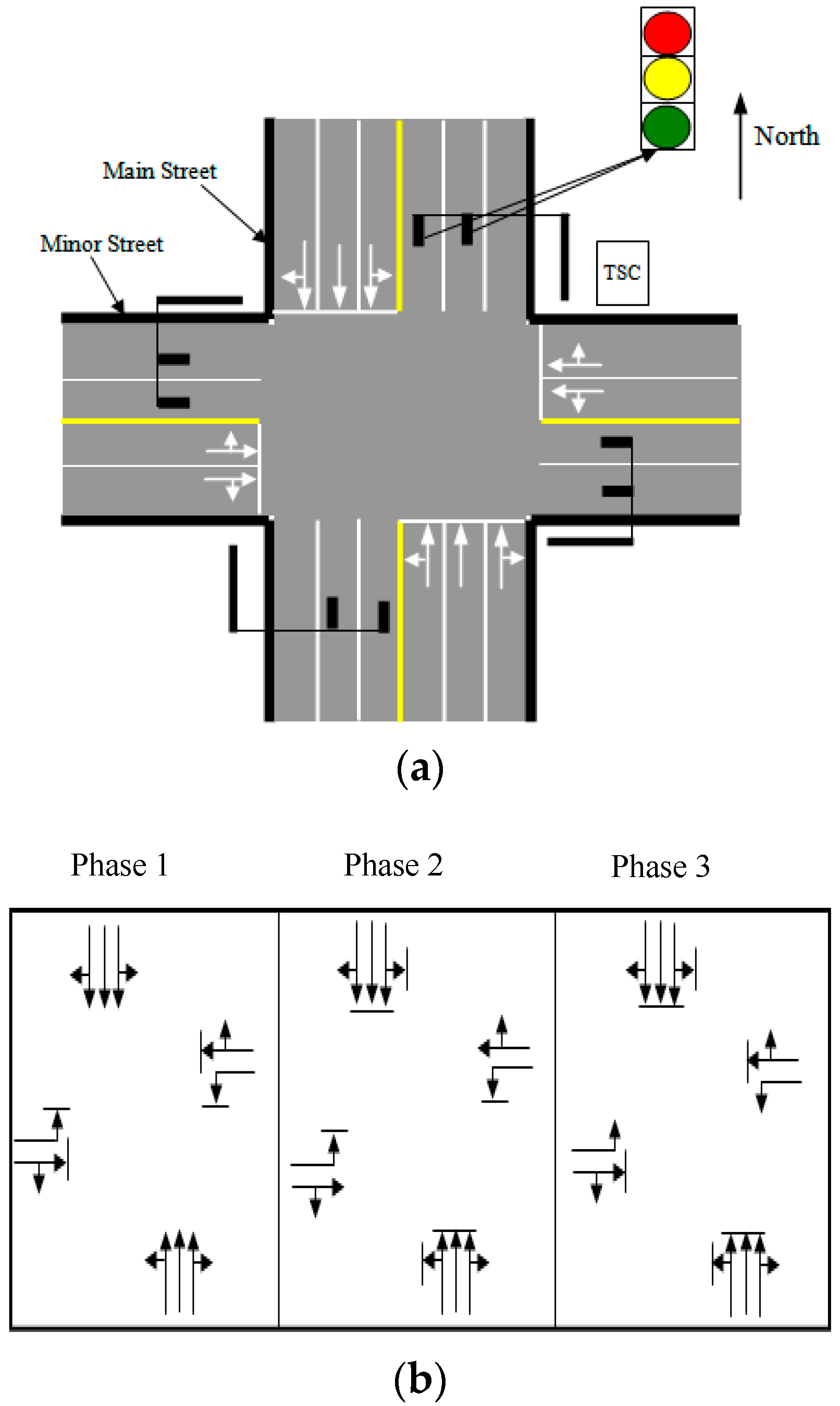
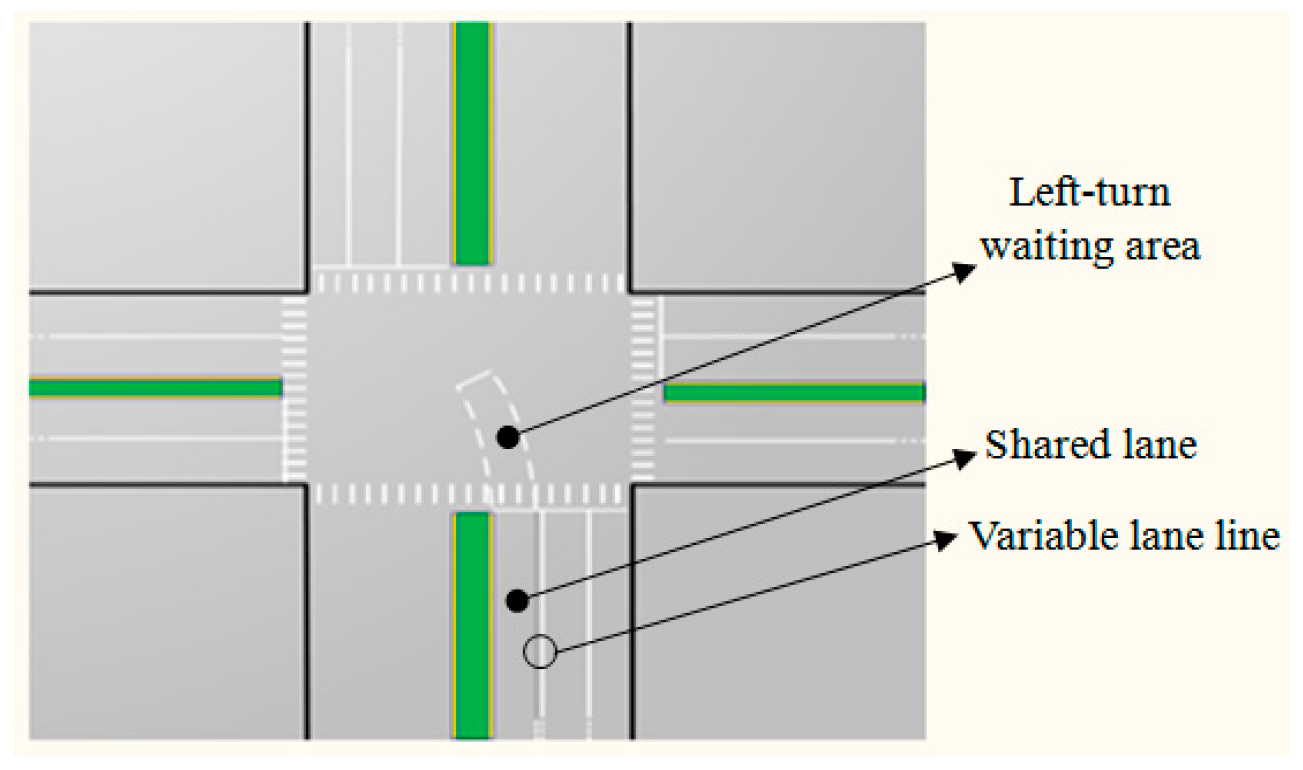
3.1. The New Intersection Signal Control Model
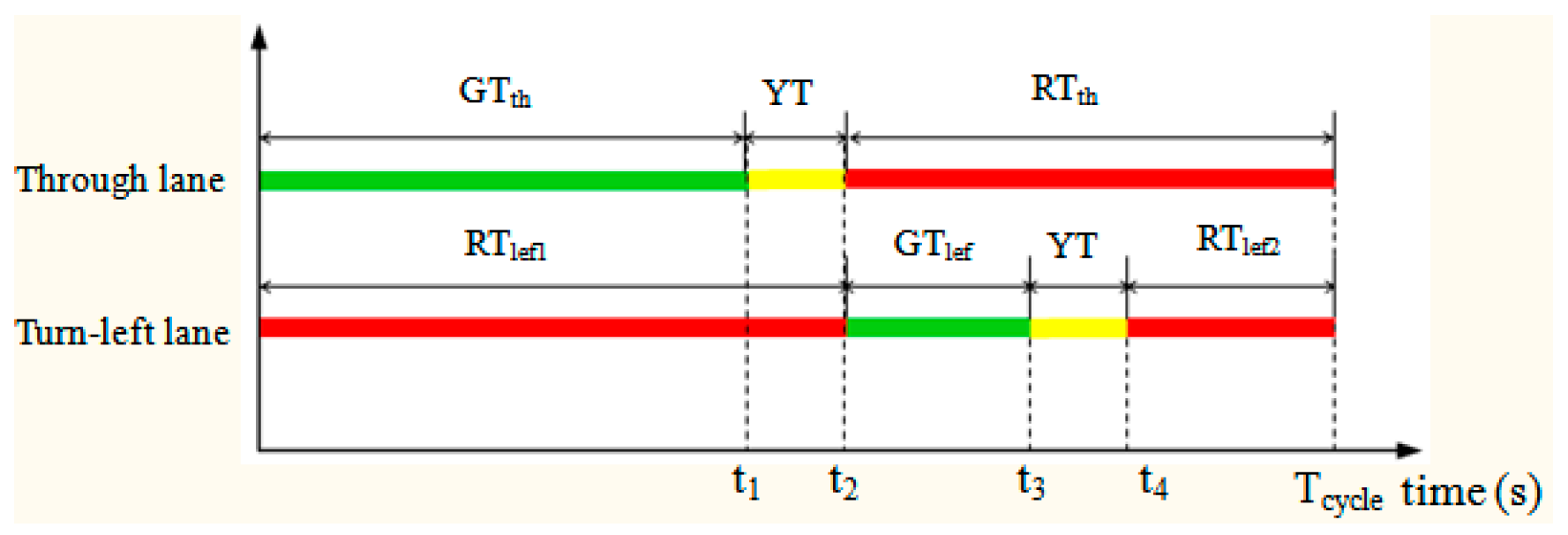
3.2. The Control Principle
4. The New Intersection Signal Control System and Control Strategy
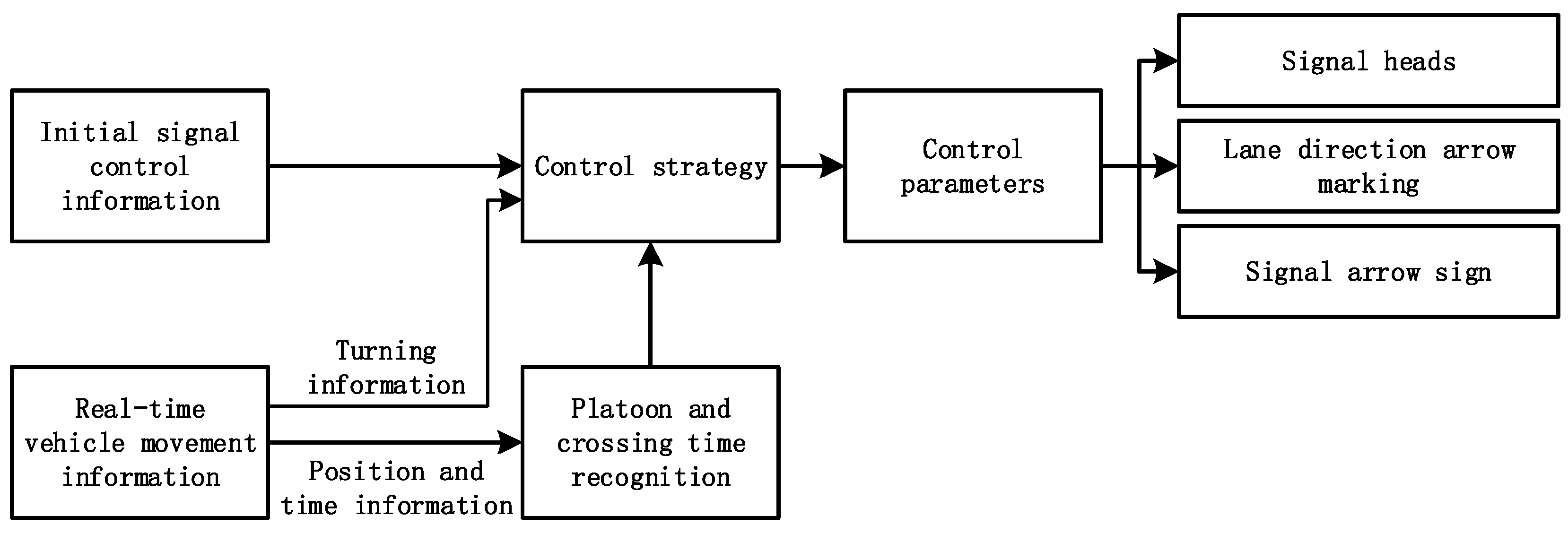
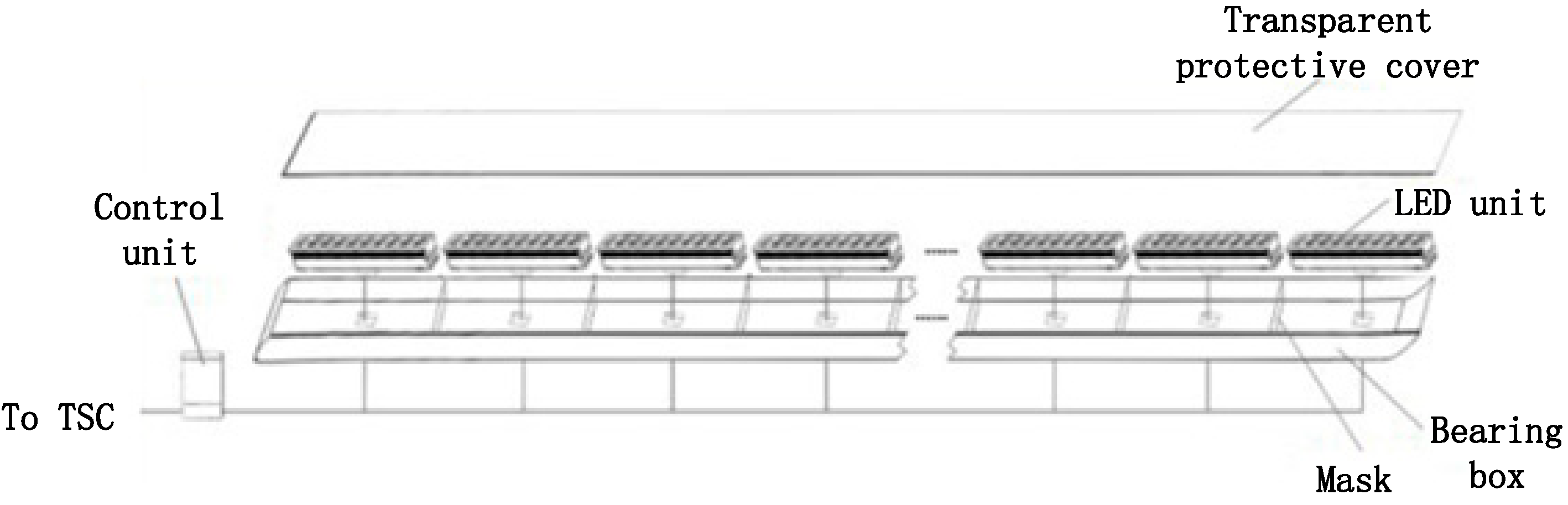
4.1. Control System
4.2. Control Algorithm
4.2.1. The Initial Signal Control Information
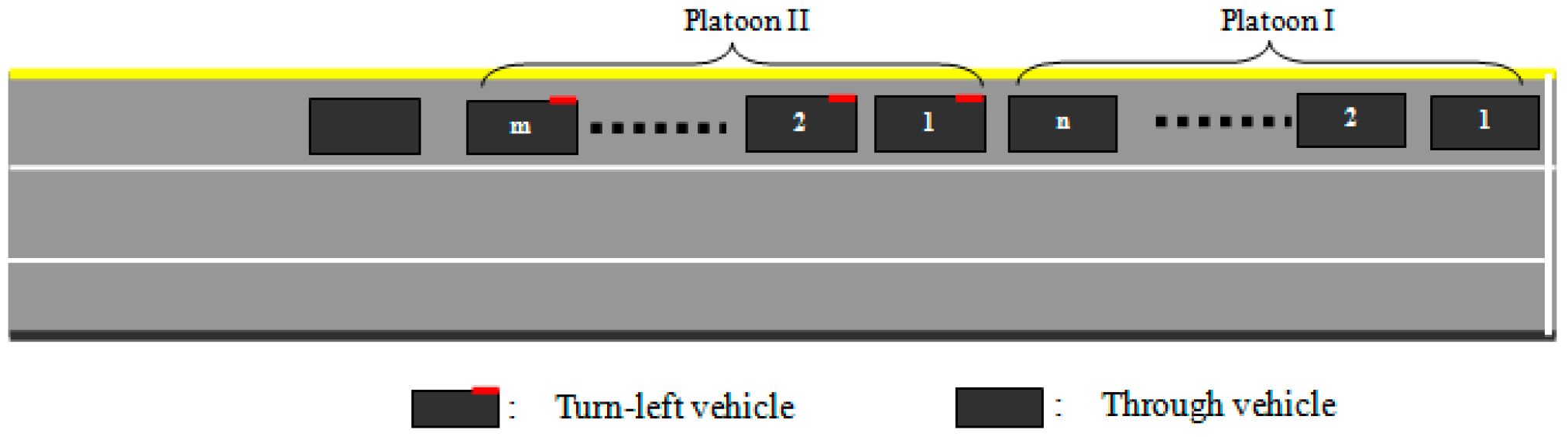
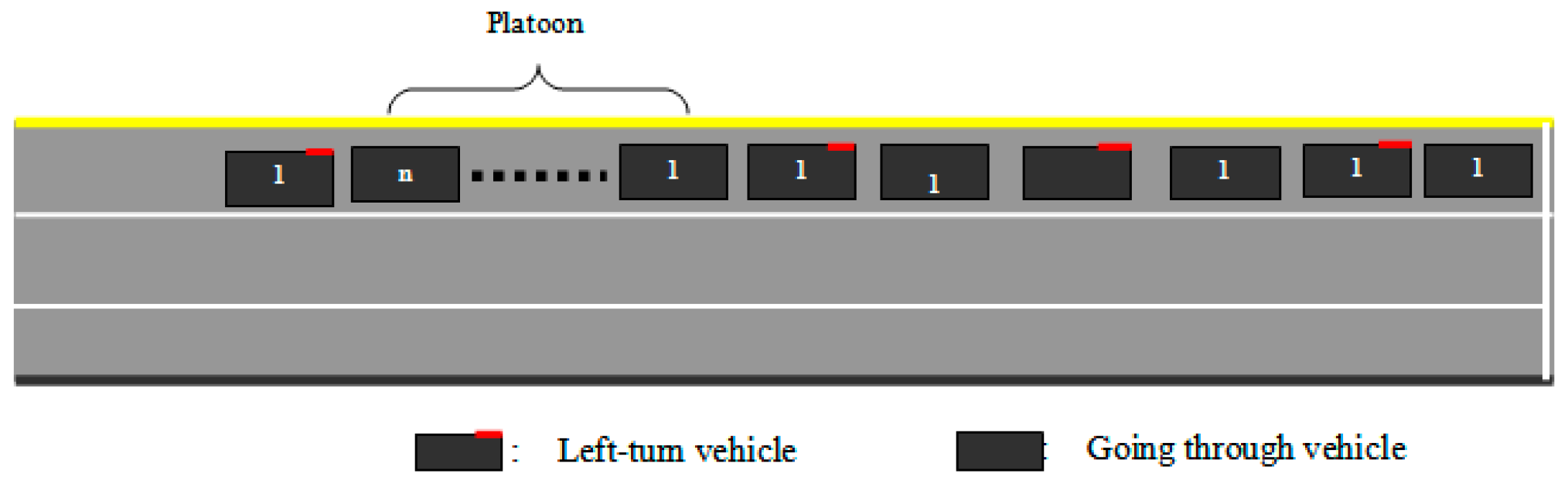
4.2.2. Platoon Recognition and Its Passing Stop-Line Time Computation
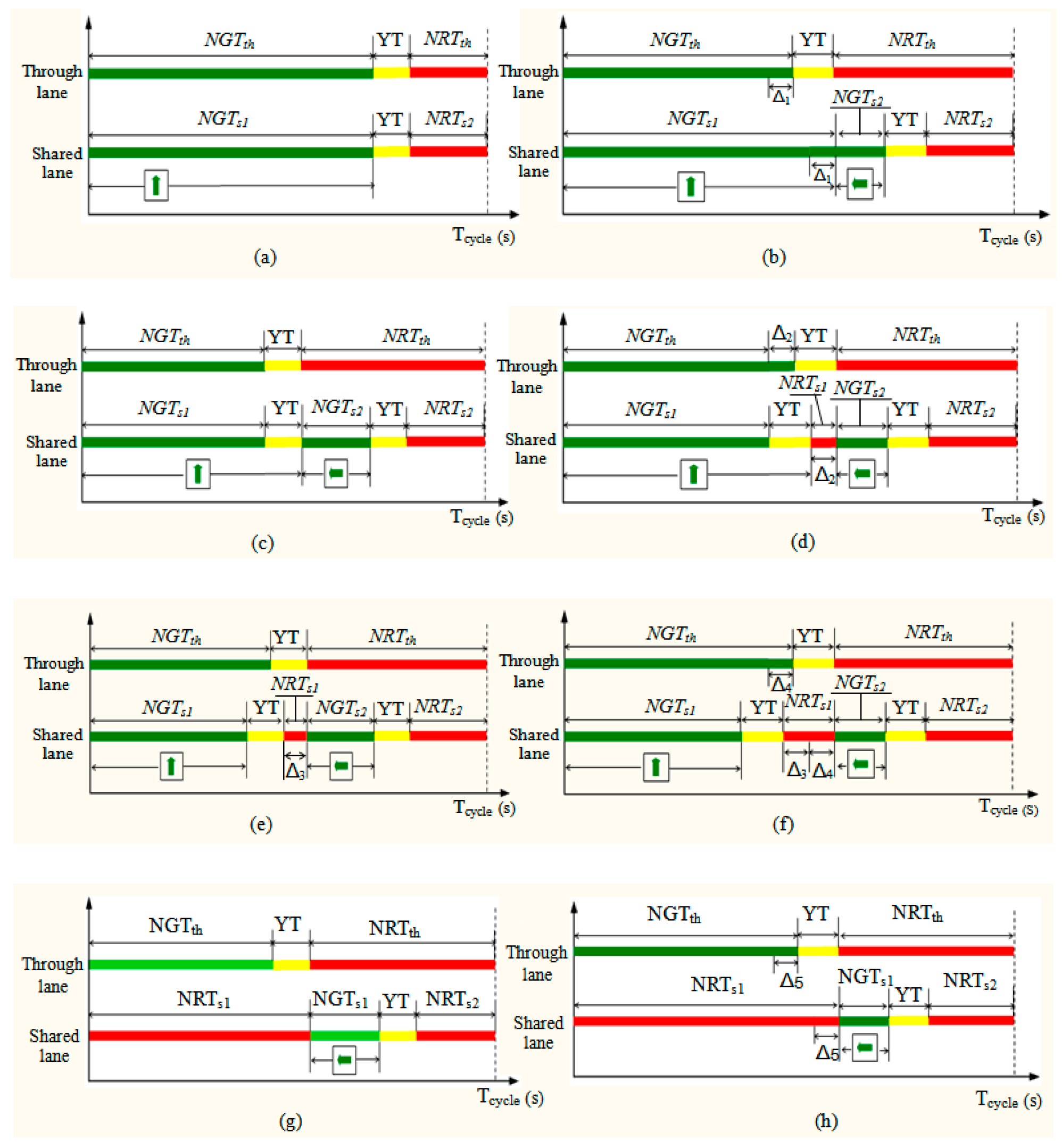
4.2.3. The Control Strategy
5. Simulation and Results
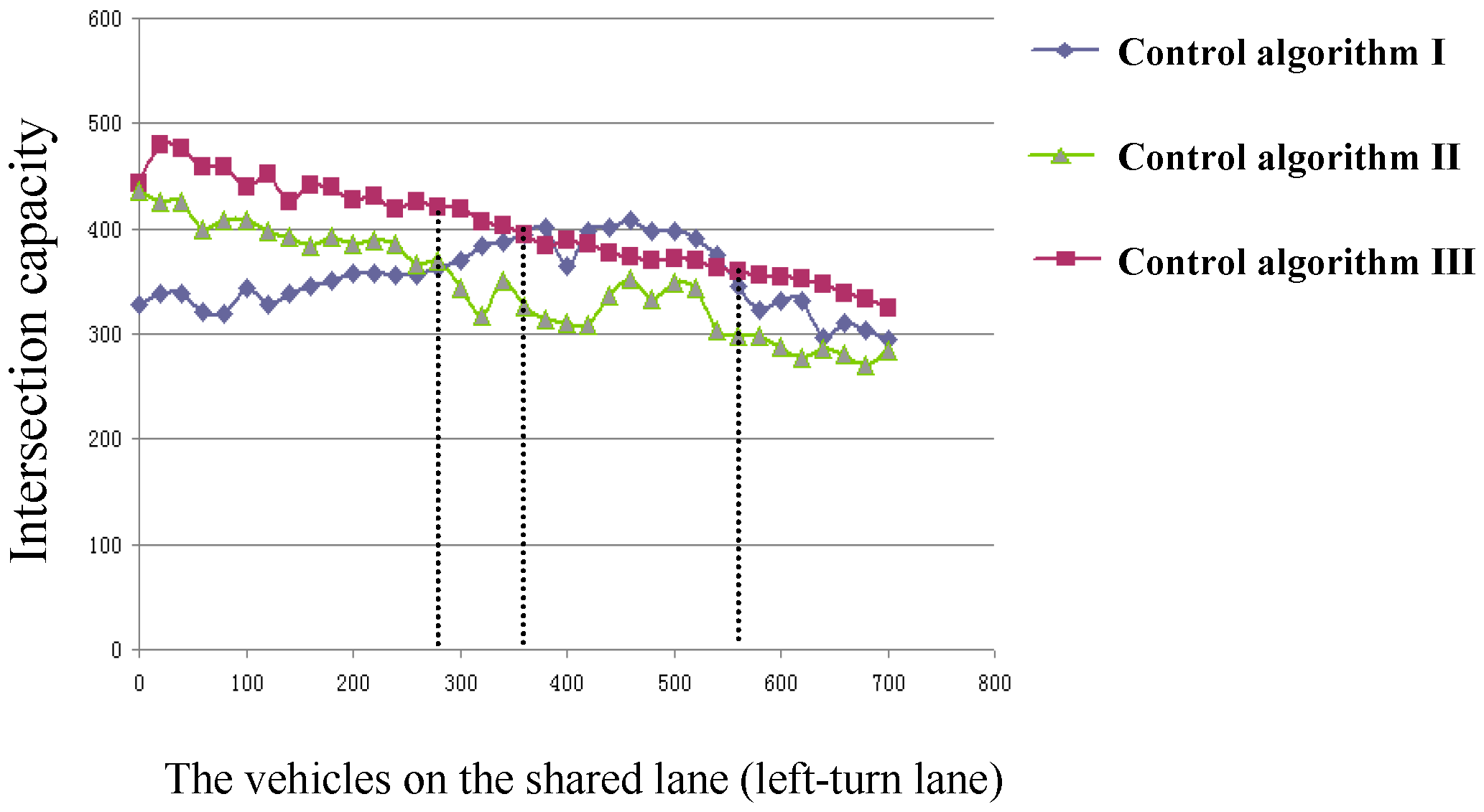
- (1)
- As the vehicles on the left-turn lane increased gradually, the intersection traffic capacity decreased under control algorithms II and III and increased for a long time under control algorithm I.
- (2)
- When the number of vehicles in the left-turn lane was less than N1, control algorithm III was the best for intersection traffic capacity, followed by control algorithm II, and the worst was control algorithm I. This means that control algorithms II and III are suitable for fewer left-turn movements. N1 was the turning point of control algorithms I and II. Below N1, control algorithm II was better, but after N1 control algorithm I was better.
- (3)
- N2 and N3 were the turning points of control algorithm I and control algorithm III. Below N2, control algorithm III was better. Above N2 and below N3, control algorithm I was better than control algorithm III. After N3, the control algorithm III was the best.
- (4)
- The control algorithm for the intersection can be given as follows:
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Desta, R.; Teklu, B.; Dananto, M. Simulation experiments and validation for considering bus priority treatments in small cites: The case of Hawassa city, Ethiopia. Int. J. Eng. Sci. Technol. 2018, 10, 21–28. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Mao, B.; Chen, Z.; Ma, C.; Li, J. Research on bus signal priority strategy for urban arteries based on real-time vehicle queuing detection. In Proceedings of the IEEE 4th International Conference on Cloud Computing and Big Data Analysis, Chengdu, China, 12–15 April 2019. [Google Scholar]
- Zhang, S.J.; Jia, S.P.; Bai, Y.; Mao, B.H.; Ma, C.R.; Zhang, T. Optimal adjustment schemes on the long through-Type bus lines considering the urban rail transit network. Discret. Dyn. Nat. Soc. 2018. [Google Scholar] [CrossRef]
- Hai, Y.; Tang, Y. Managing rail transit peak-Hour congestion with a fare-reward scheme. Transp. Res. Part B 2018, 110, 122–136. [Google Scholar]
- Gao, G.; Sun, H.; Wu, J. Activity-Based trip chaining behavior analysis in the network under the parking fee scheme. Transportation 2019, 46, 647–669. [Google Scholar] [CrossRef]
- Gao, G.; Sun, H.; Wu, J.; Liu, X.; Chen, W. Park-and-Ride service design under a price-Based tradable credits scheme in a linear monocentric city. Transp. Policy 2018, 68, 1–12. [Google Scholar] [CrossRef]
- Sumalee, A.; Ho, H.W. Smarter and more connected: Future intelligent transportation system. IATSS Res. 2018, 42, 67–71. [Google Scholar] [CrossRef]
- Cunha, F.; Maia, G.; Ramos, H.S.; Perreira, B.; Celes, C.; Campolina, A.; Rettore, P.; Guidoni, D.; Sumika, F.; Villas, L.; et al. Vehicular networks to intelligent transportation systems. Emerg. Wirel. Commun. Netw. Technol. 2018, 297–315. [Google Scholar] [CrossRef]
- Newell, G.F. Theory of highway traffic signals. Res. Rep. Inst. Transp. Available online: https://escholarship.org/uc/item/7zn2b9bc (accessed on 27 July 2017).
- Hummer, J.E. Unconventional left-Turn alternatives for urban and suburban arterials—Part one. ITE J. 1998, 68, 26–29. [Google Scholar]
- Hummer, J.E. Unconventional left-Turn alternative for urban and suburban arterials—Part two. ITE J. 1998, 68, 101–106. [Google Scholar]
- Bared, J.G.; Kaisar, E.I. Benefits of split intersections. Transp. Res. Rec. J. 2000, 1737, 34–41. [Google Scholar] [CrossRef]
- Tabernero, V.; Sayed, T.; Koscica, D. Introduction and analysis of new unconventional intersection scheme: Upstream signalized crossover intersection. In Proceedings of the 84th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 9–13 January 2005. [Google Scholar]
- Tabernero, V.; Sayed, T. Upstream signalized crossover intersection: An unconventional intersection scheme. J. Transp. Eng. 2006, 132, 907–911. [Google Scholar] [CrossRef]
- Parsons, G.F. The parallel flow intersection: A new two-Phase signal alternative. ITE J. 2007, 77, 28–37. [Google Scholar]
- Rodegerdts, L.A.; Nevers, B.L.; Robinson, B. Signalized intersections: Informational Guide; FHWA-HRT-04-091; Federal Highway Administration: Washington, DC, USA, 2004.
- Hughes, W.; Jagannathan, R.; Sengupta, D.; Hummer, J. Alternative Intersections/Interchanges: Informational Report (AIIR); FHWA-HRT-09-060; Federal Highway Administration: Washington, DC, USA, 2010.
- El Esawey, M.; Sayed, T. Analysis of unconventional arterial intersection designs (UAIDs): State-of-the-Art methodologies and future research directions. Transportmetrica 2013, 9, 860–895. [Google Scholar] [CrossRef]
- ATTAP, University of Maryland, Unconventional Intersection Design & Strategies. Available online: http://attap.umd.edu/uaid.php (accessed on 18 September 2018).
- Bared, J.G.; Kaisar, E.I. Median U-Turn design as an alternative treatment for left turns at signalized intersections. ITE J. 2002, 72, 50–54. [Google Scholar]
- Leng, J.; Zhang, Y.; Sun, M. VISSIM-Based simulation approach to evaluation of design and operational performance of U-Turn at intersection in China. In Proceedings of the 2008 International Workshop on Modelling, Simulation and Optimization, Hong Kong, China, 27–28 December 2008. [Google Scholar]
- Liu, P.; Qu, X.; Wang, W.; Cao, B. Using VISSIM to model capacity of U-Turns at unsignalized intersections with non-traversable median cross sections. In Proceedings of the Transportation Research Board 89th Annual Meeting, Washington DC, USA, 10–14 January 2010. [Google Scholar]
- Dhatrak, A.; Edara, P.; Bared, J.G. Performance analysis of parallel flow intersection and displaced left-Turn intersection designs. Transp. Res. Rec. 2010, 2171, 33–43. [Google Scholar] [CrossRef]
- Elazzony, T.; Talaat, H.; Mosa, A. Microsimulation approach to evaluate the use of restricted lefts/through U-Turns at major intersections—A Case study of cairo-Egypt urban corridor. In Proceedings of the 13th International IEEE Annual Conference on Intelligent Transportation Systems, Madeira Island, Portugal, 19–22 September 2010. [Google Scholar]
- Xuan, Y.; Daganzo, C.F.; Cassidy, M.J. Increasing the capacity of signalized intersections with separate left turn phases. Transp. Res. Part B 2011, 45, 769–781. [Google Scholar] [CrossRef]
- Zhao, J.; Ma, W.; Zhang, H.; Yang, X. Increasing the capacity of signalized intersections with dynamic use of exit lanes for left-Turn traffic. Transp. Res. Rec. 2013, 2355, 49–59. [Google Scholar] [CrossRef]
- Suh, W.; Hunter, M.P. Signal design for displaced left-turn intersection using Monte Carlo method. KSCE J. Civ. Eng. 2014, 18, 1140–1149. [Google Scholar] [CrossRef]
- Zhao, J.; Ma, W.; Head, K.L.; Yang, X. Optimal operation of displaced left-Turn intersections: A lane-Based approach. Transp. Res. Part C 2015, 61, 29–48. [Google Scholar] [CrossRef]
- Wu, J.; Liu, P.; Tian, Z.Z.; Xu, C. Operational analysis of the contraflow left-Turn lane design at signalized intersections in China. Transp. Res. Part C 2016, 69, 228–241. [Google Scholar] [CrossRef]
- Xiang, Y.; Li, Z.; Wang, W.; Chen, J.; Wang, H.; Li, Y. Evaluating the operational features of an unconventional dual-Bay U-Turn design for intersections. PLoS ONE 2016, 11, e0158914. [Google Scholar] [CrossRef] [PubMed]
- Taha, M.M.A.; Abdelfatah, A. Impact of using indirect left-Turns on signalized intersections’ performance. Can. J. Civ. Eng. 2015, 44, 462–471. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, P.; Chen, Y.; Yu, H. Can left-Turn waiting areas improve the capacity of left-Turn lanes at signalized intersections. Procedia-Soc. Behav. Sci. 2012, 43, 192–200. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Y.; Zhao, J.; Wu, N. Increasing the capacity of signalized intersections with left-Turn waiting areas. Transp. Res. Part A 2017, 105, 181–196. [Google Scholar] [CrossRef]
- Research and Innovative Technology Administration. Available online: http://www.its.dot.gov/connected_vehicle.htm (accessed on 6 September 2013).
- USDOT. Connected Vehicle Reference Implementation Architecture. Available online: http://www.iteris.com/cvria/html/applications/ applications.html (accessed on 27 July 2015).
- USDOT. ITS Research Fact Sheets. Available online: http://www.its.dot.gov/communications/its_factsheets.htm (accessed on 27 June 2016).
- Jin, N. Design of visual feature detection system for intelligent driving of electric vehicle. In Proceedings of the IEEE International Conference on Robots & Intelligent System, Changsha, China, 26–27 May 2018. [Google Scholar]
- Yu, L.; Shao, X.; Wei, Y.; Zhou, K. Intelligent land-Vehicle model transfer trajectory planning method based on deep reinforcement learning. Sensors 2018, 18, 2905. [Google Scholar]
- El Hajjaji, A.; Chadli, M.; Oudghiri, M.; Pagès, O. Observer-Based robust fuzzy control for vehicle lateral dynamics. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 July 2006. [Google Scholar]
- Mi, T.; Li, C.; Hu, C.; Wang, J.; Chen, N.; Wang, R. Robust H∞ output-Feedback yaw control for in-Wheel motor driven electric vehicles with differential steering. Neurocomputing 2016, 173, 676–684. [Google Scholar]
- Dahmani, H.; Chadli, M.; Rabhi, A.; El Hajjaji, A. Vehicle dynamics and road curvature estimation for lane departure warning system using robust fuzzy observers: Experimental validation. Veh. Syst. Dyn. 2015, 53, 1135–1149. [Google Scholar] [CrossRef]
- Milz, S.; Arbeiter, G.; Witt, C.; Abdallah, B.; Yogamani, S. Visual SLAM for automated driving: Exploring the applications of deep learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar] [CrossRef]
- Hubmann, C.; Schulz, J.; Becker, M.; Althoff, D.; Stiller, C. Automated driving in uncertain environments: Planning with interaction and uncertain maneuver prediction. IEEE Trans. Intell. Veh. 2018, 3, 5–17. [Google Scholar] [CrossRef]
- Gradinescu, V.; Gorgorin, C.; Diaconescu, R.; Cristea, V.; Iftode, L. Adaptive traffic lights using car-to-Car communication. In Proceedings of the IEEE 65th Vehicular Technology Conference, Dublin, Ireland, 22–25 April 2007. [Google Scholar]
- Priemer, C.; Friedrich, B. A decentralized adaptive traffic signal control using V2I communication data. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009. [Google Scholar]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-Time adaptive signal control in a connected vehicle environment. Transp. Res. Part C 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, H.X. Estimating traffic volumes for signalized intersections using connected vehicle data. Transp. Res. Part C 2017, 79, 347–362. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Hu, J.; An, S.; Wang, M.; Park, B.B. Eco approaching at an isolated signalized intersection under partially connected and automated vehicles environment. Transp. Res. Part C 2017, 79, 290–307. [Google Scholar] [CrossRef]
- He, Q.; Head, K.L.; Ding, J. PAMSCOD: Platoon-Based arterial multi-Modal signal control with online data. Transp. Res. Part C 2012, 20, 164–184. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, C.; Liu, H.X. Spatiotemporal intersection control in a connected and automated vehicle environment. Transp. Res. Part C 2018, 89, 364–383. [Google Scholar] [CrossRef]
- Ma, C.; Hao, W.; Wang, A.; Zhao, H. Developing a coordinated signal control system for urban ring road under the vehicle-Infrastructure connected environment. IEEE Access 2018, 6, 52471–52478. [Google Scholar] [CrossRef]
- Han, E.; Pil Lee, H.; Park, S.; So, J.; Yun, I. Optimal signal control algorithm for signalized intersections under a V2I communication environment. J. Adv. Transp. 2019. [Google Scholar] [CrossRef]
- Kamal, K.; Chandan, K. A real-Time traffic signal control strategy under partially connected vehicle environment. Promet Traffic Transp. 2019, 31, 61–73. [Google Scholar]
- Xu, Y.; Li, D.; Xi, Y.; Lin, S. Game-Based traffic signal control with adaptive routing via V2I. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- Christian, P.; Bernhard, F. A method for tailback approximation via C2I-Data based on partial penetration. In Proceedings of the 15th World Congress on Intelligent Transport Systems and ITS America's 2008 Annual Meeting, New York, NY, USA, 16–20 November 2008. [Google Scholar]
- Xu, B.; Jeff, B.X.; Yougang, B.; Wan, L.; Wang, J.; Eben, LS.; Li, K. Cooperative method of traffic signal optimization and speed control of connected vehicles at isolated intersections. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1390–1403. [Google Scholar] [CrossRef]
- Li, Z.; Elefteriadou, L.; Ranka, S. Signal control optimization for automated vehicles at isolated signalized intersections. Transp. Res. Part C 2014, 49, 1–18. [Google Scholar] [CrossRef]
- Pereira, A.M. Traffic signal control for connected and non-Connected vehicles. In Proceedings of the Smart City Symposium Prague, Prague, Czech Republic, 24–25 May 2018. [Google Scholar]
- Yang, K.; Guler, S.I.; Menendez, M. Isolated intersection control for various levels of vehicle technology: Conventional, connected, and automated vehicles. Transp. Res. Part C 2016, 72, 109–129. [Google Scholar] [CrossRef]
- Sun, W.; Zheng, J.; Liu, H.X. A capacity maximization scheme for intersection management with automated vehicles. Transp. Res. Procedia 2018, 23, 121–136. [Google Scholar] [CrossRef]
- Page, T.R.D. Multiple Sources of Safety Information from V2V and V2I: Redundancy, Decision Making, and Trust-Safety Message Design Report; U.S. Department of Transportation: Washington, DC, USA, 2015.
- Webster, F.V. Traffic signal settings. In Road Research Technique Paper; Road Research Laboratory: London, UK, 1958. [Google Scholar]
- Khisty, C.J.; Lall, B.K. Transportation Engineering: An Introduction, 3rd ed.; Pearson: London, UK, 2002. [Google Scholar]
- Gartner, N.H. Development and implementation of an adaptive control strategy in a traffic signal network: The virtual-fixed-cycle approach. In Transportation and Traffic Theory in the 21st Century, Proceedings of the 15th International Symposium on Transportation and Traffic Theory, Adelaide, Australia, 16–18 July 2002; Emerald Group Publishing Limited: Bingley, UK, 2002. [Google Scholar]
- Akcelik, R.; Besley, M.; Roper, R. Fundamental Relationships for Traffic Flows at Signalized Intersections; ARRB Transportation Research Ltd.: Vermont South, VIC, Australia, 1999. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Left-Turn Vehicles | Capacity of the Intersection | Increased Percentage | |
|---|---|---|---|
| Simulation I | 100 | 343 | - |
| 160 | 345 | - | |
| 220 | 358 | - | |
| Simulation II | 100 | 409 | 19.2% |
| 160 | 383 | 11% | |
| 220 | 389 | 8.7% | |
| Simulation III | 100 | 440 | 28.3% |
| 160 | 442 | 28.1% | |
| 220 | 430 | 20.1% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, C.; Wang, J.; Qin, L.; Li, S.; Cheng, Y. A Novel Left-Turn Signal Control Method for Improving Intersection Capacity in a Connected Vehicle Environment. Electronics 2019, 8, 1058. https://doi.org/10.3390/electronics8091058
Ren C, Wang J, Qin L, Li S, Cheng Y. A Novel Left-Turn Signal Control Method for Improving Intersection Capacity in a Connected Vehicle Environment. Electronics. 2019; 8(9):1058. https://doi.org/10.3390/electronics8091058
Chicago/Turabian StyleRen, Chuanxiang, Jinbo Wang, Lingqiao Qin, Shen Li, and Yang Cheng. 2019. "A Novel Left-Turn Signal Control Method for Improving Intersection Capacity in a Connected Vehicle Environment" Electronics 8, no. 9: 1058. https://doi.org/10.3390/electronics8091058
APA StyleRen, C., Wang, J., Qin, L., Li, S., & Cheng, Y. (2019). A Novel Left-Turn Signal Control Method for Improving Intersection Capacity in a Connected Vehicle Environment. Electronics, 8(9), 1058. https://doi.org/10.3390/electronics8091058