1. Introduction
Prognostics and health management (PHM) has modernized the industry in terms of equipment reliability, attracting both academia and industry practice [
1]. In the PHM strategy, diagnostics and prognostics are two important mechanisms applied in machine condition-based maintenance. A diagnostic mechanism detects, isolates, and identifies the present machine condition. Driven primarily by machines such as motors and generators, modern industries have been improved by advance diagnostics such as better preventive maintenance, improved safety and increased reliability [
2]. Deep learning, an emerging branch of artificial intelligence (AI), has been playing an important role in this PHM modernization.
For prognostics and the health management of machines, bearing fault diagnosis is one of the well-known applications of deep learning (DL). The recent survey in [
3] and the review in [
4] provide comprehensive assessments of different state-of-the-art DL-based machine health monitoring systems applied to bearing fault diagnostics. These systems vary by their different settings; thus, there is always the need to provide alternatives to help AI practitioners choose the best-suited algorithm.
Feature selection is one of the primary concerns for effective deep learning (DL) applications. Vibrations or acoustic signals tend to be widely used features in bearing fault diagnosis [
4,
5,
6]. Various deep learning algorithms have been developed for feature extraction. A widely known convolutional neural network has recently evolved into different variants such as the convolutional neural network and convolutional discriminative feature learning [
7,
8], the discriminative deep belief network [
9,
10], the convolutional bi-directional long short-term memory (LSTM) network [
11], and the ensemble deep convolutional neural network [
12]. Deep neural networks with unsupervised learning based on auto-encoders [
13] and recurrent neural networks [
14] have also been developed for machine health monitoring. Other than vibration or acoustic signal signature features, motor current analysis [
15,
16,
17] and thermographic images [
18,
19,
20,
21] are also considered and employed, showing practically good performances. Their feature combinations, such as vibration and current signals [
22], are also studied. For practical application, practitioners may not prefer vibration features due to the long-term problem of installing physical sensors. Thermographic devices are also relatively expensive. Thus, the stator current signal seems to be an attractive feature due to its easy installation, more reliable data collection, and the fact that it is comparatively cheaper.
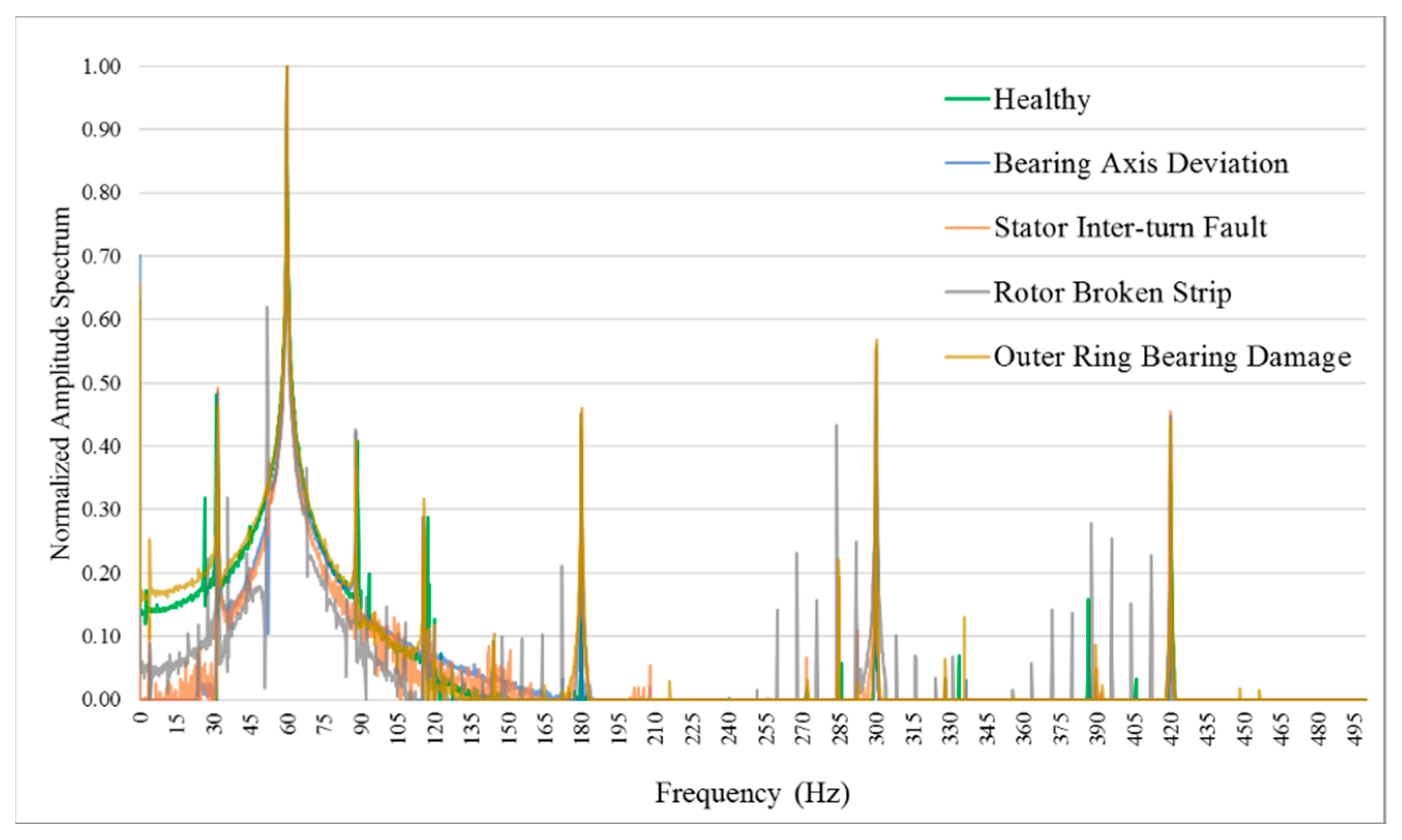
Analyzing timer series data such as vibration and stator current signals uses various feature preprocessing methods. Digital signal processing (DSP) techniques such as wavelet transformation [
23,
24,
25], frequency spectral analysis [
26,
27,
28], empirical mode decomposition (EMD) [
29,
30,
31], Hilbert–Huang transform [
32,
33,
34], and combined Hilbert and wavelet transform [
35,
36] have been used for different motor faults, especially for non-DSP practitioners. Frequency transformation, though, tends to be the simplest tool to analyze time series data diagnosis schemes. However, these techniques are selected and configured manually, meaning that they may prove difficult to use.
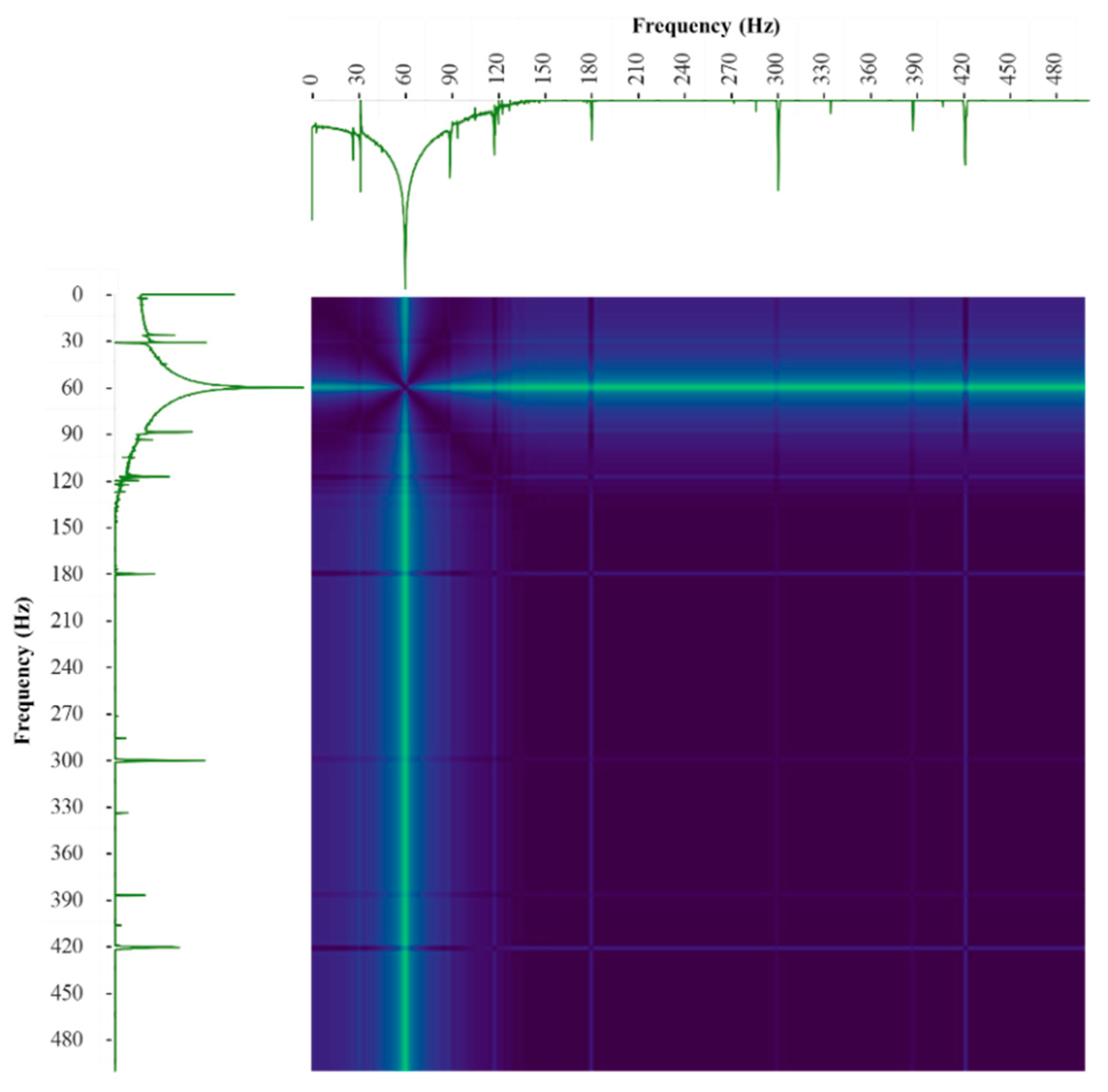
Recurrence plots are widely used for the analysis and visualization of complex and dynamic systems [
37]. Recently, a study [
38] reviewed, from the last two decades, the application of recurrence plots in various areas. It was found that this simple recurrence plot technique can represent the dynamic characteristics behind music pieces [
39]. A similar plotting scheme is used in this study, using frequency spectra instead of time series signals.
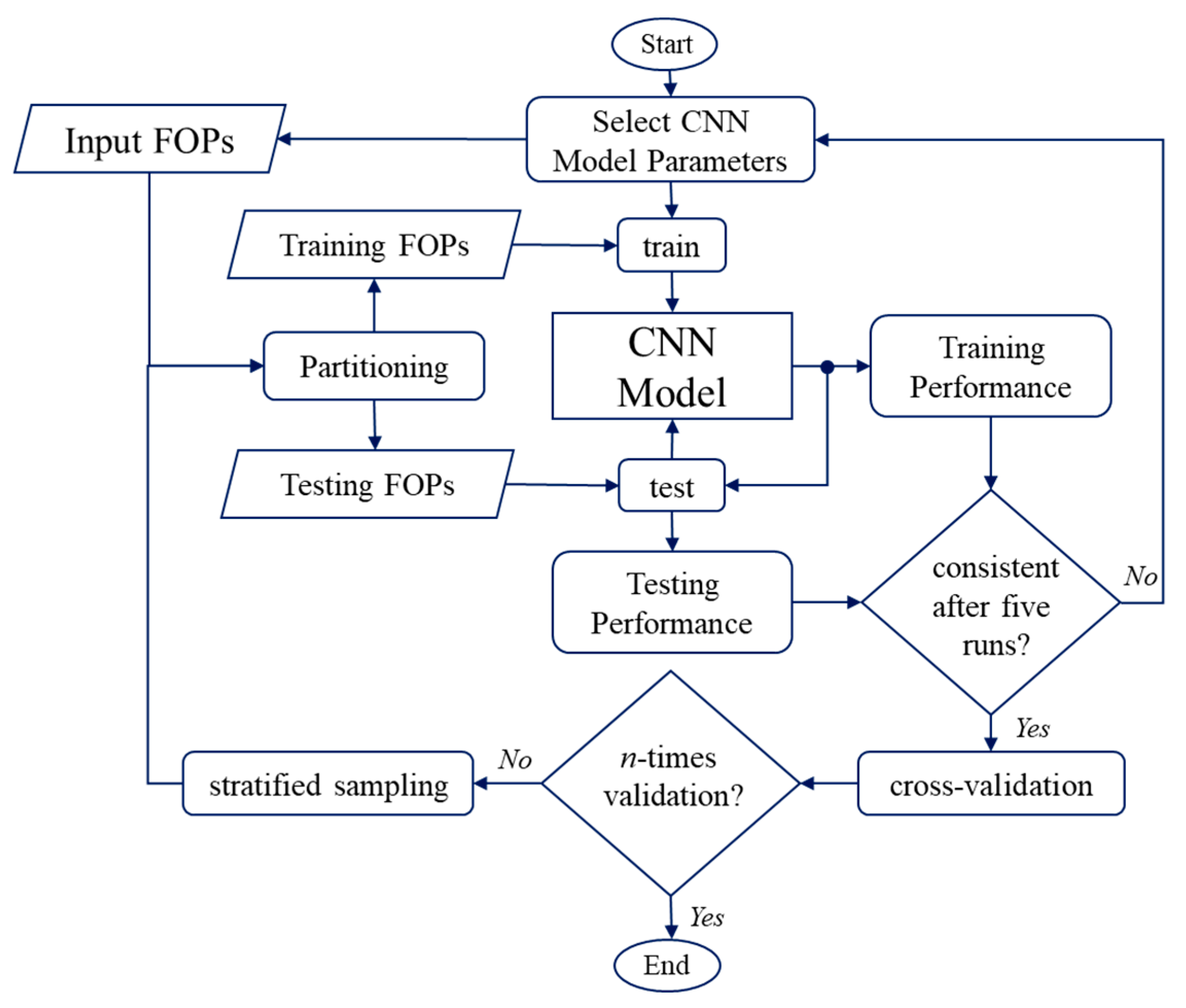
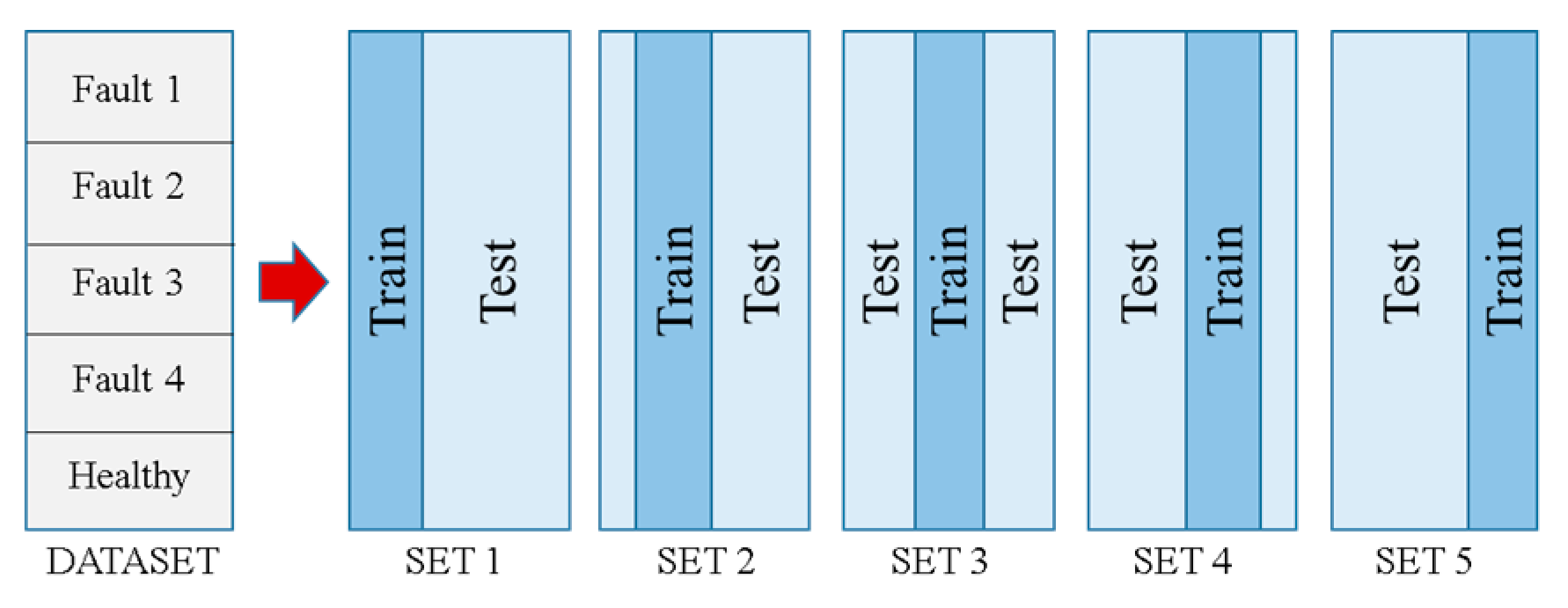
A new method for detecting motor faults is proposed based on frequency occurrence plots and deep learning. The remaining sections of this study are as follows: Materials and Methods, Deep learning Implementation, Results and Discussion, and Conclusion.
2. Motor Dataset
A three-phase 220-V, 2-HP, 4-pole, 1720-rpm squirrel-cage induction motor is used as the test motor for data collection.
Table 1 shows the actual motor specifications. A set of 150 three-second healthy motor current signals is collected from this healthy motor, with a sampling frequency of 10,000 Hz. The motor is sampled under five coupled loading variations (0, 25%, 50%, 75% and 100% loads). Another four similar motors are prepared under the same data collection to generate data for four motor fault conditions. With similar motor specifications, these motors are synthetically manipulated to simulate artificial faults, namely bearing axis deviation, stator winding inter-turn short circuiting, a broken rotor strip, and outer ring bearing damage.
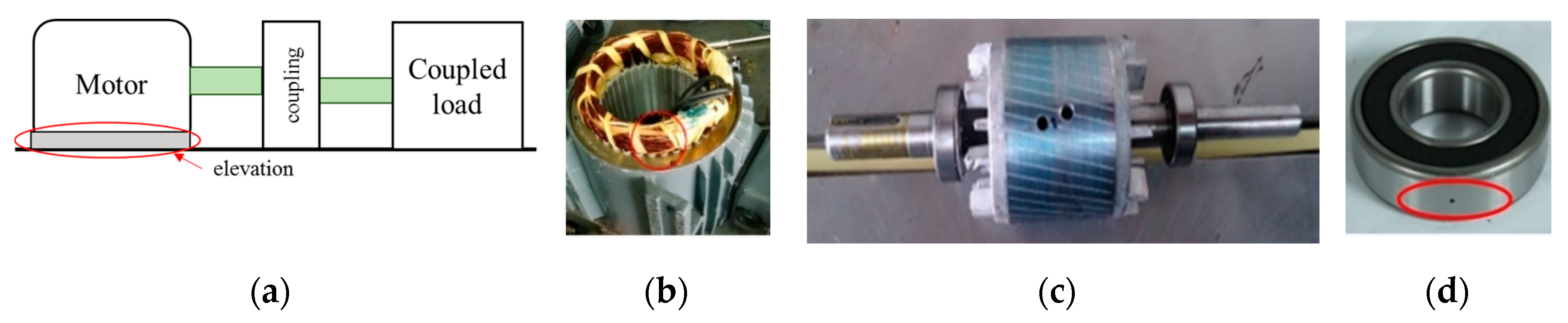
2.1. Synthetic Motor Fault Conditions
There are four typical motor fault conditions—bearing axis misalignment, inter-turn short circuiting, a broken rotor strip and an outer ring bearing fault—synthetically applied in four respective test motors.
2.1.1. Bearing Axis Misalignment
The bearing axis deviation fault happens when a motor is eccentrically coupled to its load. Improper installation, changes or damage to motor bases cause the motor shaft to misalign with the coupling load. Similar to [
40], an artificially created eccentricity misalignment experiment with an elevation of 0.5 mm, as illustrated in
Figure 1a, is also used to simulate this fault.
2.1.2. Stator Inter-Turn Short Circuiting
The aging insulation of the stator coil due to the long operation period of motors is often believed to be the primary reason for motor overheating. In severe cases, it causes short-circuits between turns of the same phase or even in different phases. To simulate this motor stator turn-to-turn short circuit fault, two adjacent turns of the stator winding of a test motor are intentionally short-circuited by breaking their insulation and allowing them to make contact, as shown in
Figure 1b.
2.1.3. Broken Rotor Strip Fault
Excessive current due to long-term overloading is often seen as the reason of a broken rotor strip fault. This fault is synthetically simulated by drilling directly into one side of the rotor bar similar to [
41]. Taking into consideration its serious impact to the motor, the first drill underwent an experimental detection. After checking that the motor is still running well, a second drill is performed as shown in
Figure 1c.
2.1.4. Outer Ring Bearing Fault
Lastly, outer ring damage is a common bearing fault. This bearing fault increases machine vibration whenever a bearing ball passes over a damaged area [
42]. In this simulation, a hole is drilled in the outer ring of a test motor. Electrical conducting heat is applied to the hole, making sure that its residue is removed and no physical deformations are present after drilling, as shown in
Figure 1d.
2.2. Data Collection
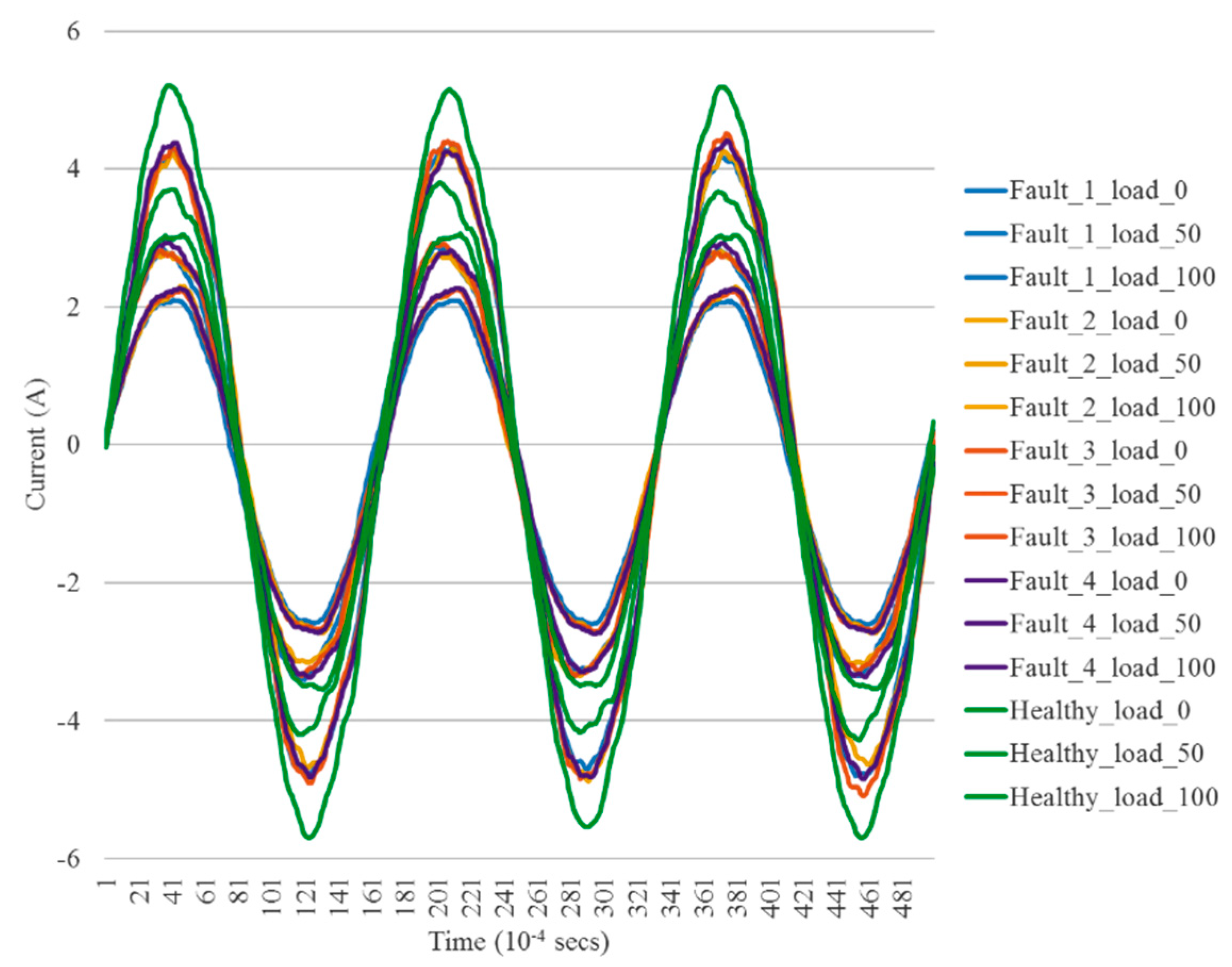
The experimental simulation of previous test motors produces a total of 3750 time series data from 150 three-second current signals of five motor conditions under five loading variations. A set of three full-cycle sample waves of current signals plotted in
Figure 2 shows five motor conditions under three different motor loadings. It can be observed that the healthy motor upper-bounded all other fault-conditioned motors in terms of current magnitude in all three motor loadings. This may be because healthy motors have less energy dissipation than faulty motors.
5. Results and Discussion
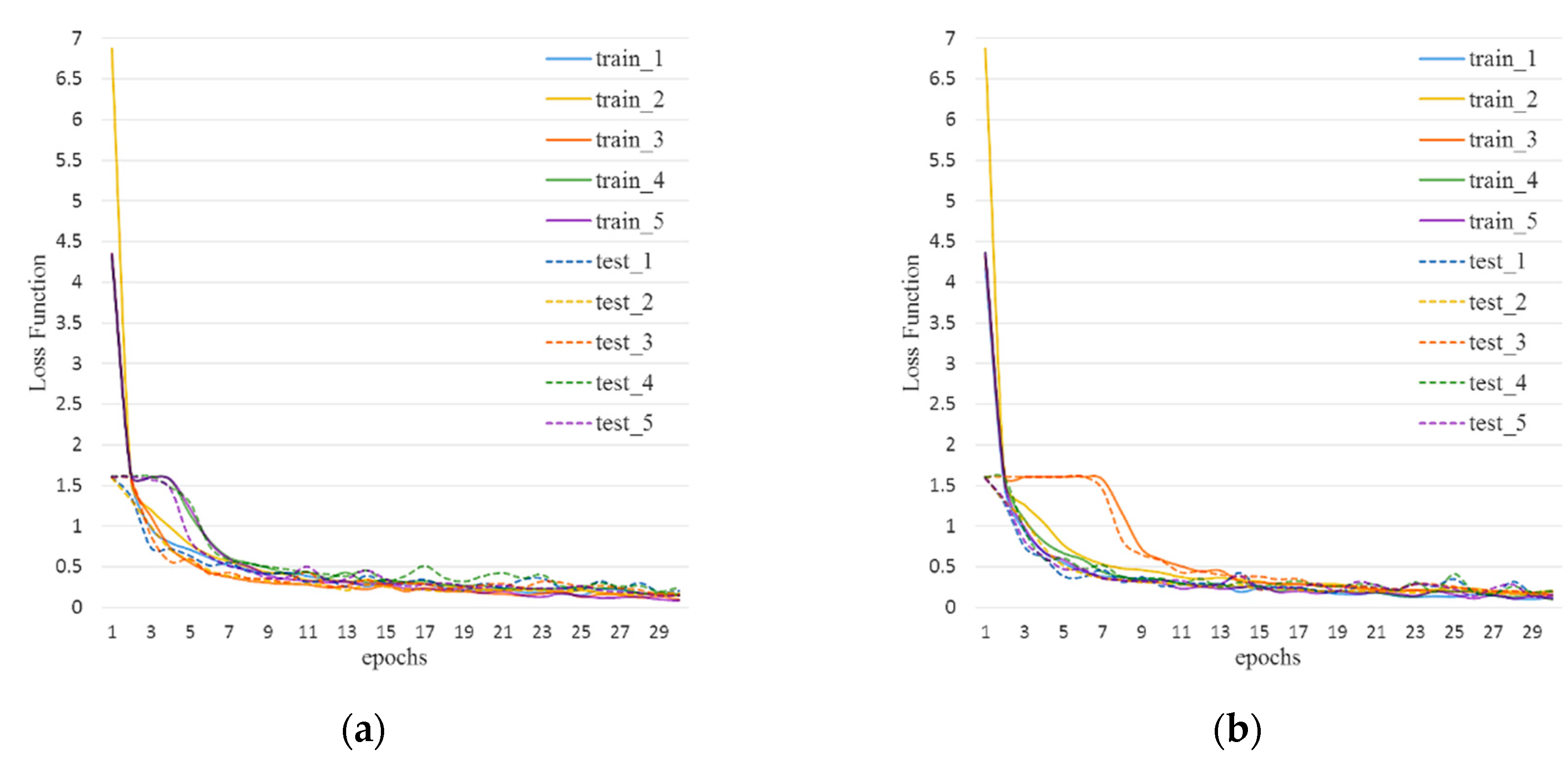
The CCE loss functions of five models according to five motor couple loadings are shown in
Figure 11a–e. All five models tend to converge to a CCE loss value less than 0.25 at each epoch. The presence of early convergence occurred in some runs in the early epochs. Applying dropouts help the model to get away from early convergence, which is often believed to be caused by local optimum convergence. On the other hand, when the motor loading condition is not used as an input label, the model in
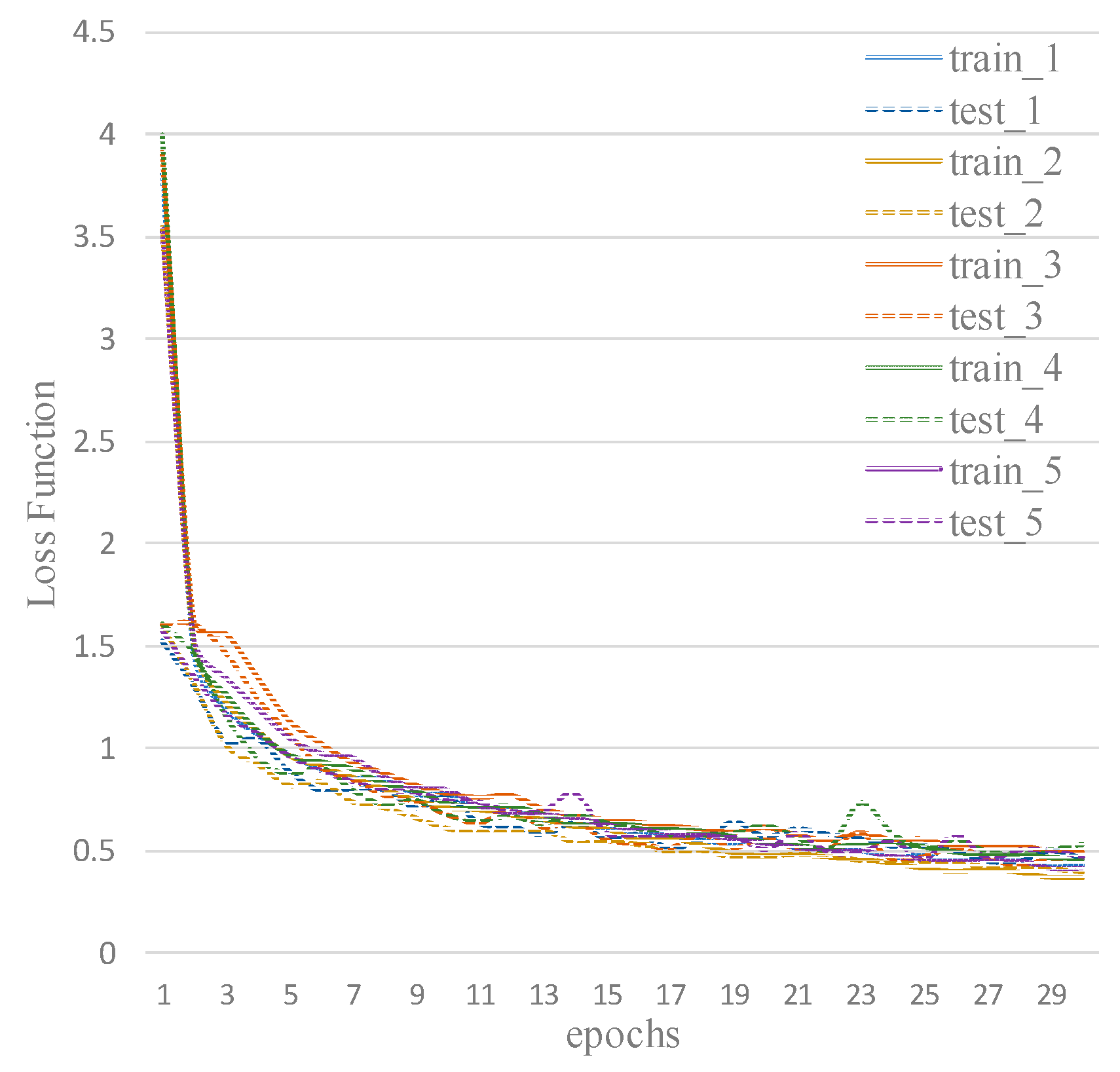
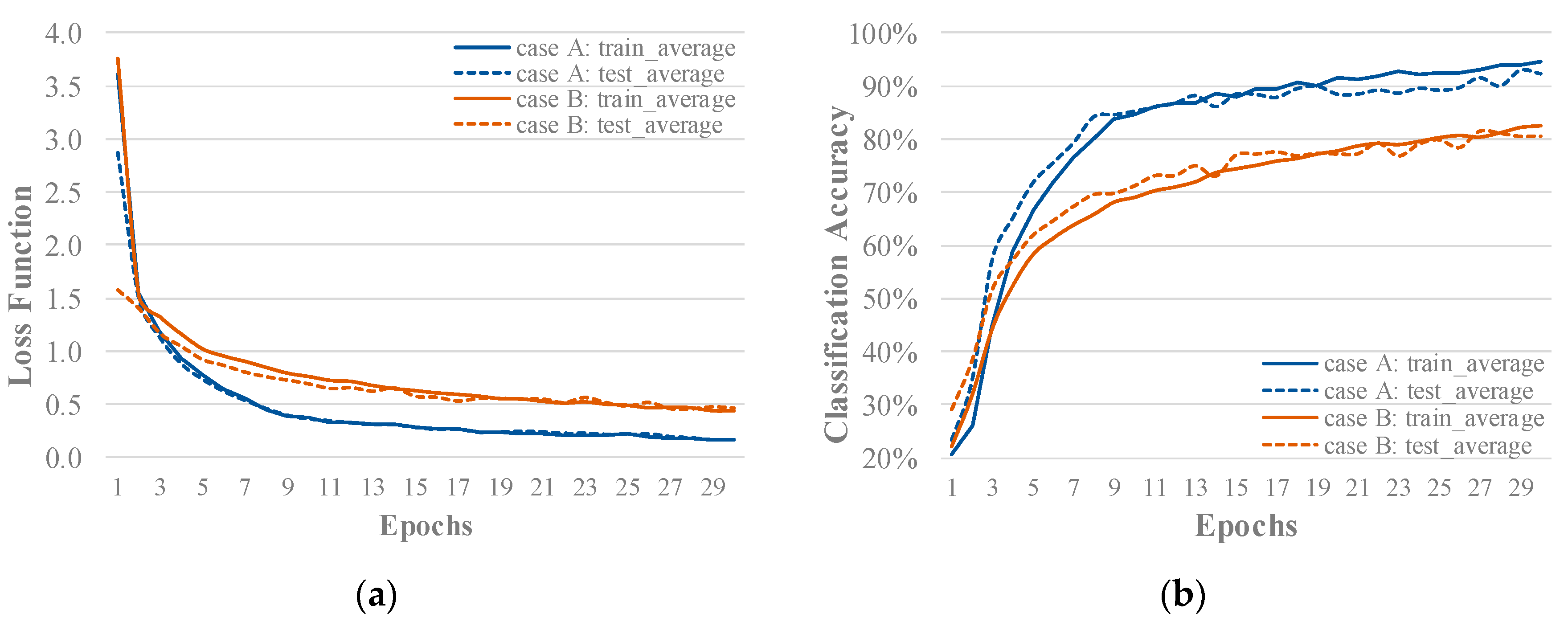
Figure 12 tends to converge at a slightly higher loss value of 0.50 after five cross-validation runs. All of the models are still converging, but training them further seems to produce no significant changes in their performances and will only lead to a greater risk of overfitting.
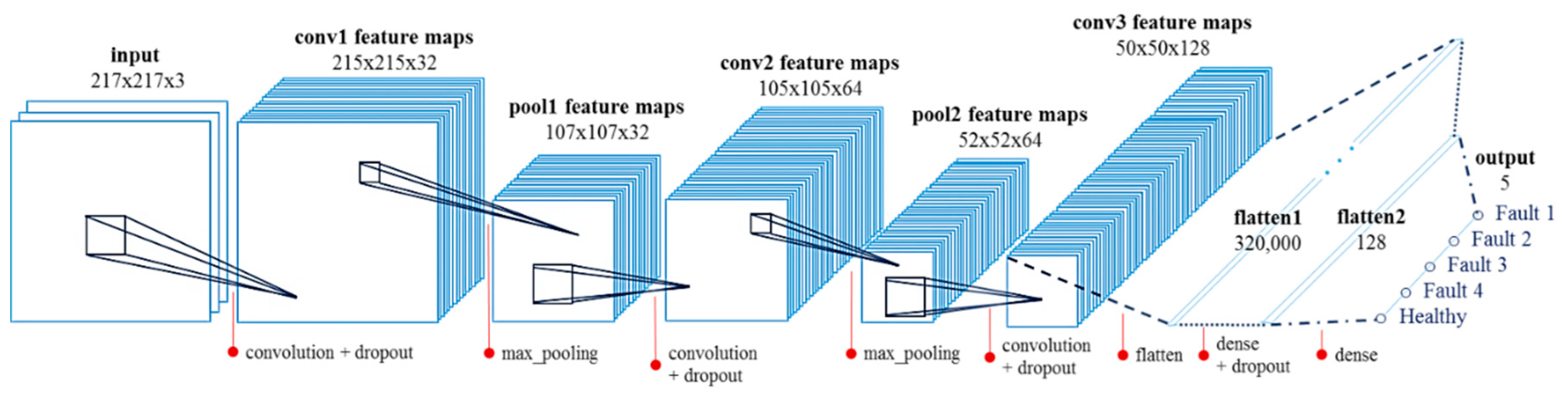
Figure 13a shows the average loss function difference between the combined five models when the motor loading condition is used as an input label, and the model when the motor loading condition is not used. It is evident that FOP-CNN tends to predict better than when the load condition is not used.
Figure 13b also presents their classification performances. This average classification accuracy graph of both cases shows similar converging performances. Both cases have identical FOP-CNN parameters as shown in
Table 2. Furthermore, this further verifies the observed graphical differences across motor loading conditions (see
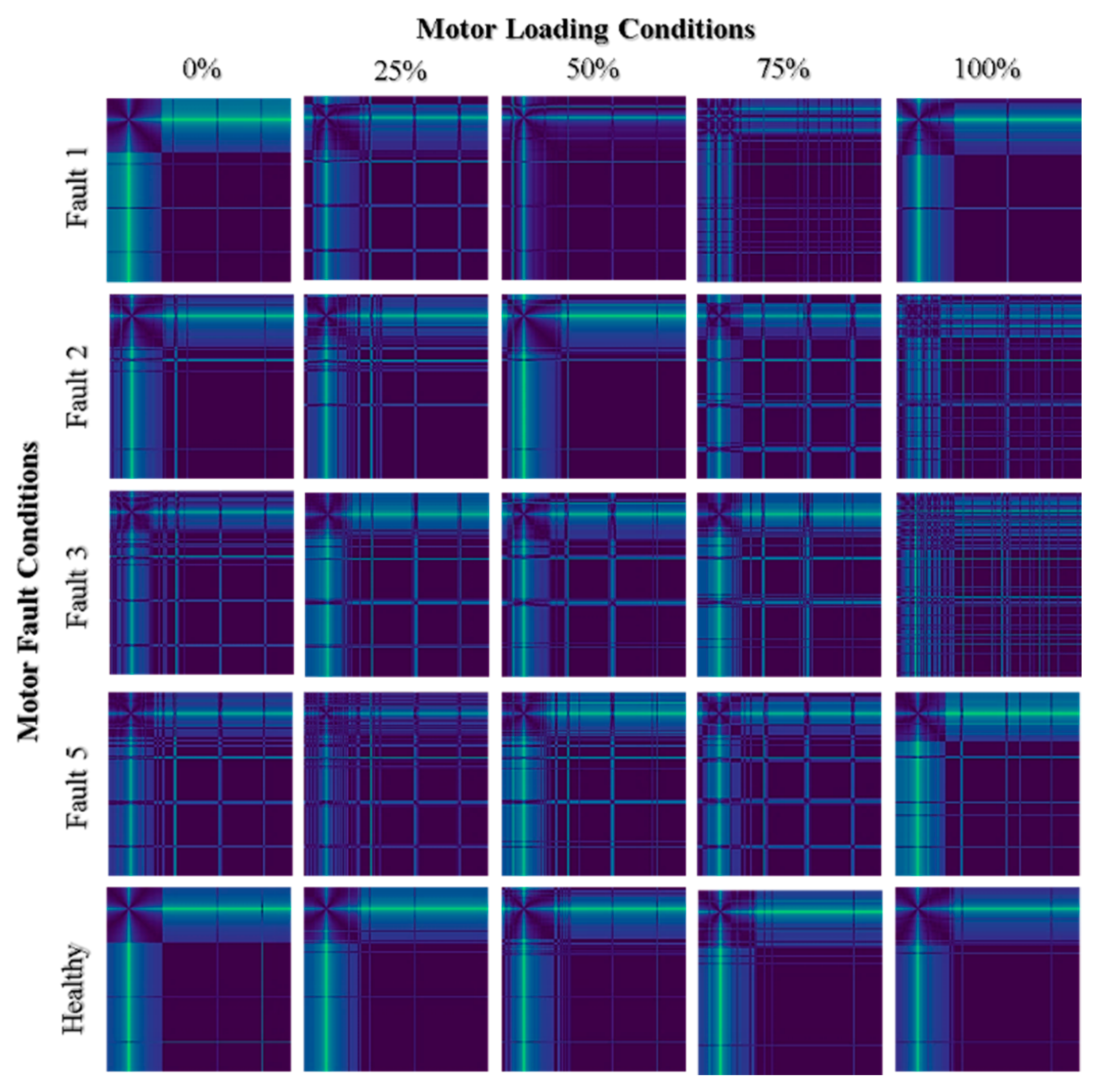
Figure 10). Simulating separate models, as performed in the first case model, may have avoided the difficulty caused by these differences. However, both cases still reach practical accuracies of 92% and 80%, respectively.
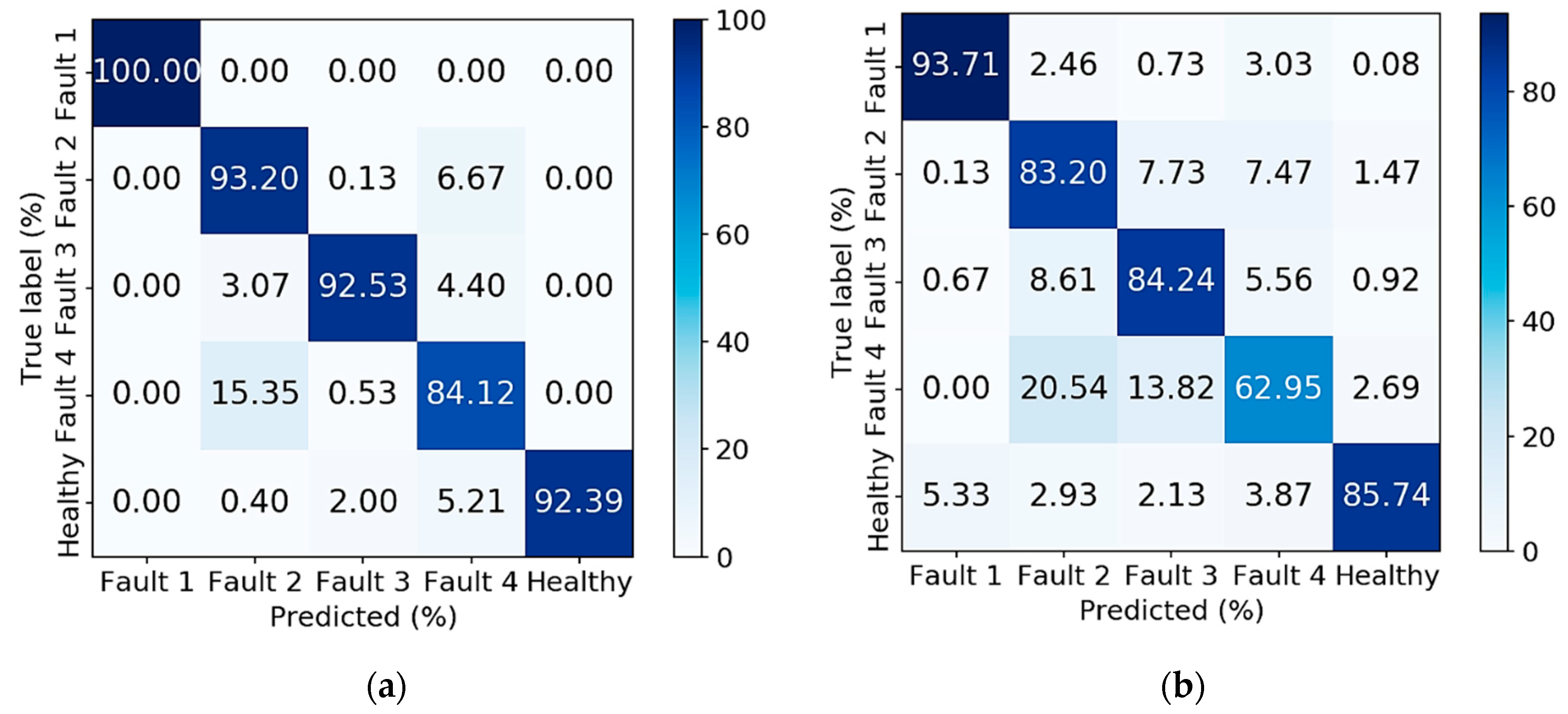
The classification reports of both cases are also taken. Each motor fault condition has 150 balance data. The first case model can classify bearing misalignment (Fault 1) with perfect recall (100%) and almost perfect precision (99.88%), as shown in
Table 3. This seems intuitive since the energy loss caused by this fault has a direct effect on the motor’s current signature. It also precisely classifies healthy motors with 100% precision, and has little difficulty in recalling other faults with 92.22% recall. Two motor fault conditions—stator inter-turn fault (Fault 2) and broken rotor strip (Fault 3)—both have particularly good performances, with F-scores greater than 87.70% and 94.74%, respectively. However, outer bearing ring damage (Fault 4) performs the worst, with an F-score of 83.38%. When predicting Fault 4, there is a strong confusion in terms of predicting it as Fault 2, as shown in the confusion matrix of
Figure 14a. Compared to other motor fault conditions, this fault may prove difficult to predict using FOP-CNN based only on the motor’s current signature. It seems that this fault is greatly confused with the motor stator inter-turn fault condition, with a 15% accuracy on average. The prediction of a healthy motor condition is also confused with Fault 4, with a 5.20% average accuracy. This means that the synthetic physical damage inflicted to the outer ring bearing may have insignificant energy loss and may be due to friction. This small amount of energy loss may have no direct effect on and lead no changes in the motor’s current signature.
In the second case, the FOP-CNN model still performs like the previous case model, but with relatively lower classification accuracy. Predictions of bearing misalignment faults and the healthy state have better F-scores than the other fault conditions, as shown in
Table 4. The classification of the bearing axis misaligned fault (Fault 1) also has the highest precision, with 93.40%. Fault 4 has the least recall, with only 62.60%, which seems to affect the overall performance. The model can classify all motor fault conditions with at least 83.20% accuracy, except when classifying outer bearing ring damage (Fault 4), where it only has a 62.95% accuracy, as shown in its confusion matrix in
Figure 14b. When predicting Fault 4, this is often confused with the stator inter-turn fault (Fault 2) and broken rotor strip (Fault 3) conditions. This performance is relatively similar to the previous case model where prediction Fault 4 is worst-performing class.
The performances of other motor fault detection algorithms are shown in
Table 5. Comparatively, the proposed FOP-CNN performs competitively with the other known algorithms. It is important to take note that these algorithms have different case settings; thus, the comparison based on classification accuracy seems ungrounded and is difficult to justify. Moreover, note that the dataset used for FOP-CNN is identical to empirical wavelet transform convolutional neural network (EWT-CNN) [
50], but with more samples collected.
The difference between training and testing accuracies is the most common indicator to analyze the presence of overfitting—an especially important property to determine whether the train–test learning algorithm is robust and reliable. The higher the difference, the greater the learning generalization, thus making the method more unreliable. In
Table 6, the proposed FOP-CNN is shown to be more robust than the best-performing algorithm, with a 13-fold lower learning difference. This means that the model tends to be more generalized, meaning that it can predict motor faults more reliably and accurately. It is commonly known in the literature that the higher the dataset, the more reliable and accurate the learning model tends to be, which is the case for the proposed algorithm.
6. Conclusions
A novel motor fault diagnosis is successfully performed using only motor stator current signals and a frequency occurrence plot-based convolutional neural network (FOP-CNN). Five motor fault conditions—bearing axis deviation, stator coil turn-to-turn short circuit fault, broken rotor strip, outer bearing ring damage, and healthy motors—are considered and simulated under five motor loading conditions: 0%, 25%, 50%, 75% and 100% coupled loads. The diagnosis is also evaluated under two case scenarios—when the motor loading condition is considered as a label and when it is not. It was found that FOP-CNN tends to have a more robust performance when the motor load condition is available and is considered as an input label of the model. However, FOP-CNN still performed satisfactorily when the loading condition was not considered as an input label. Both cases provide users with an option of whether to install motor-coupled load monitoring or not.
FOP-CNN easily predicts the bearing axis deviation fault and healthy motor conditions. It can also satisfactorily predict stator coil turn-to-turn short circuit faults, broken rotor strips, and outer bearing ring damage faults. On the other hand, when the motor loading condition is not available, FOP-CNN can still predict all motor fault conditions satisfactorily, except the outer bearing ring damage fault. Future research on motor fault diagnosis based on other signals generated by vibration sensors and thermocouples can use FOP-CNN. This deep learning model also paves the way for new feature extraction techniques for time series applications.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}