A Prediction-Based Model for Consistent Adaptive Routing in Back-Bone Networks at Extreme Situations



Abstract
:1. Introduction
- –
- A Differential Path Congestion Consistency Model is proposed to describe the latency variation between two paths.
- –
- Based on the model, a Path Swap Indicator (PSI) is proposed to predict the future latency changing trend. Relying on learning the latest congestion situation and predicting the onset of a long-term and consistent channel deterioration, the routing strategy is able to make a long-term effective decision on the path switching, i.e., to switch the path if and only if the target path’s condition will be better than the current one over a relatively long period of time.
- –
- Experiments on a testbed built by the Docker network were carried out to evaluate the proposed strategy. The results are presented and analyzed in detail.
2. State of Art
3. Consistent Path Congestion Model
3.1. Consistent Path Congestion Model and Its Related Algebra
3.1.1. Differential Path Congestion Indicator
3.1.2. Cumulative Differential Path Congestion Indicator
3.1.3. Cumulative Differential Path Congestion Consistency Indicator
3.2. Path Swap Indicator
3.3. A Demo of the PSI Calculation Process
4. Evaluation
- Q1:
- Is the proposed PSI able to predict when one path’s situation is steadily better than the other (in terms of latency), in different extreme situations? In other words, how often is path i’s congestion situation indeed worse or better than path j (i.e., ) when their indicators are 1 and 0, respectively, and to what extent was the channel situation improved by the PSI indicator.
- Q2:
- How consistent is the predication, or in other words, what is the frequency of path swaps, or in yet another way to put it, how long does it last between the indicator swaps in extremely congested situations when the latency difference between paths oscillate.
- –
- True/False rate, which means the rate when the PSI has correctly predicted the congestion situation between the current path and the backup path, including, when the PSI is 1, the latency of the current path is indeed larger than the backup one, and when PSI is 0, the latency of the current path is smaller than the backup one.
- –
- Latency difference, defined by the difference between the latency of the path selected by OSPF and the latency of the backup path , used as an indicator of the congestion comparison of the two paths. There are two main approaches to measure the latency: RTT, which is the time overhead for a packet to travel from source node to the destination and back, and Time for The First Byte (TTFB), which is the time overhead from the source to the destination node. In this paper, RTT is used like in most other works. As the latency testing tool, ping is used in this paper. Although there are some limitations of ping, (for example, ping works on ICMP packets but not TCP/UDP packets, and the former might have lower priority than the later in real-life backbone networks, and thus experience different latencies, which in turn results in inaccurate measurement), but in our experiment that was run on a Docker network simulated on one laptop, the ICMP and TCP/UDP packets shared the same priority; thus we argue that the latency difference is not an issue for the results demonstrated.
- –
- Accuracy improvement, which denotes when the PSI turns to 1, the increment in percentage of the times when the latency of the current path is indeed larger than that of the backup one.
- –
- Time interval between path swaps , which is the average time interval between PSI changes, as defined in Equation (10).
4.1. Dataset
4.2. Experiment Setup
- -
- iperf (https://iperf.fr) A tool that actively measures the maximum achievable bandwidth.
- -
- ping (http://man7.org/linux/man-pages/man8/ping.8.html) A tool that uses the ICMP protocol to test whether a host is up or down, measuring Round-Trip Time (RTT) and packet loss statistics at the same time.
- -
- tc (http://www.man7.org/linux/man-pages/man8/tc.8.html) A linux shell command to show and manipulate traffic control settings.
- -
- quagga (https://www.quagga.net) A network routing software suite providing implementations of OSPF, Routing Information Protocol (RIP), Border Gateway Protocol (BGP), and IS-IS for Unix-like platforms, particularly Linux, Solaris, FreeBSD, and NetBSD.
4.3. Results
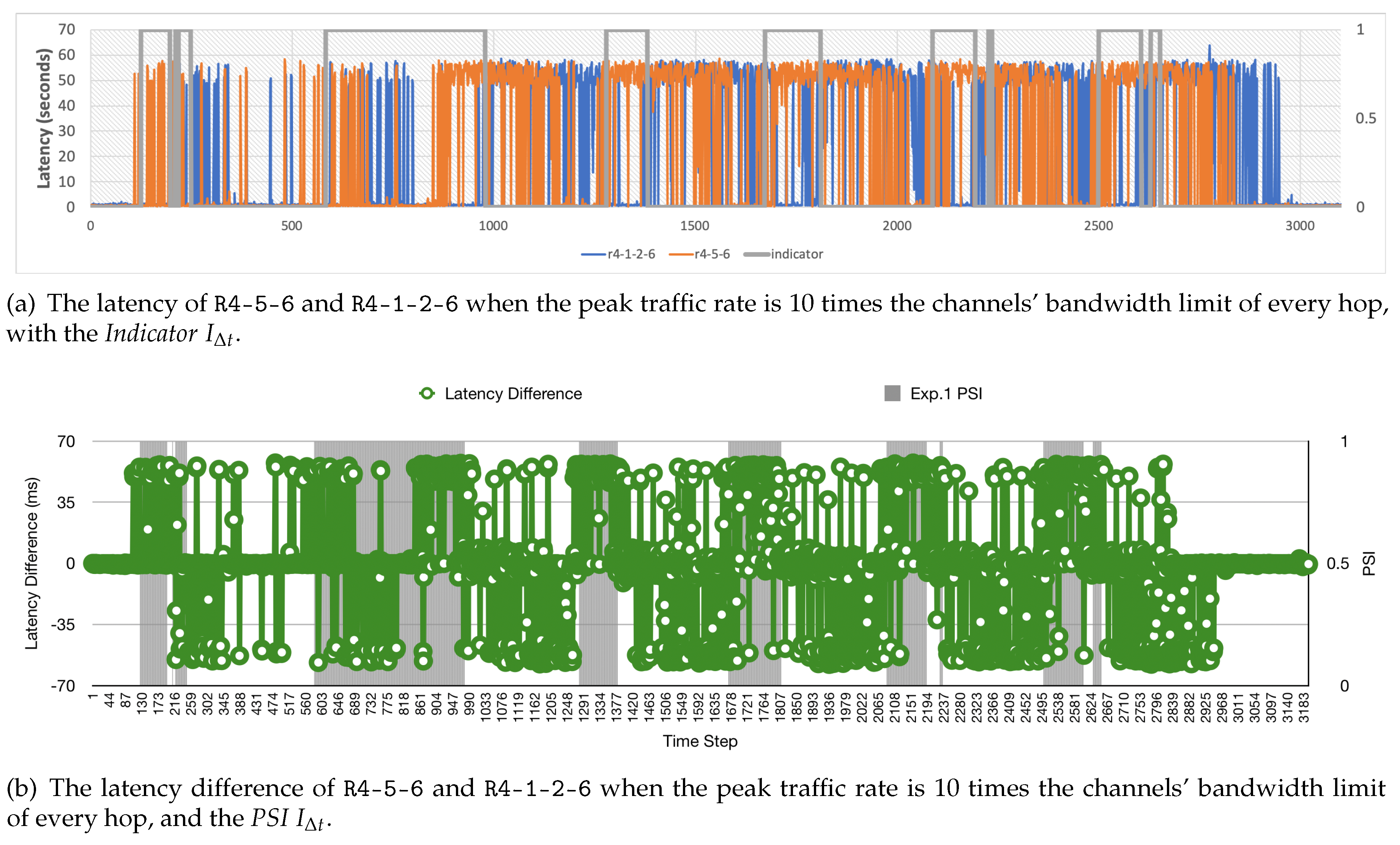
4.3.1. Results of Experiment 1
4.3.2. Results of Experiment 2
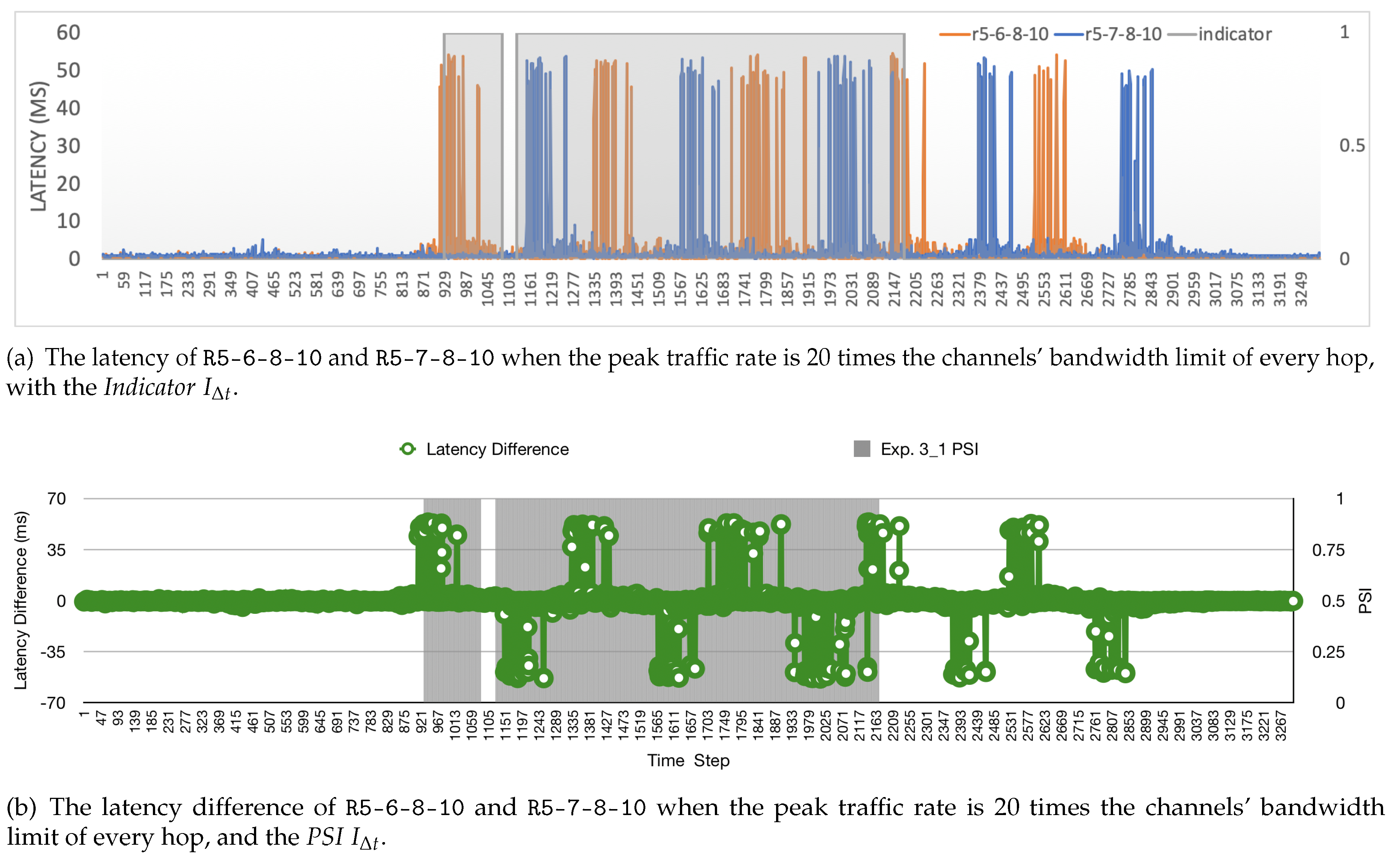
4.3.3. Results of Experiment 3
4.3.4. Summary
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Latency of the Path i at time t | |
| Latency of the Path j at time t | |
| Latency Differential Sensitivity represent a certain amount of congestion by a certain amount of latency. | |
| Sample Interval | |
| T | Cumulative Window the time period of the history in step of that is taken into consideration when calculating . |
| Differential Path Congestion Indicator (DPCI) | |
| Discrete Time Differential Path Congestion Indicator obtained from by sampling at a sampling interval . | |
| Cumulative Differential Path Congestion Indicator (CDPCI) obtained from from the sum of over the period of time T. | |
| the process in which increases compared to the last value | |
| the process in which decreases compared to the last value | |
| Latency Consistency Sensitivity the number of times that has increased | |
| Latency Consistency Sensitivity the number of times that has decreased | |
| Consistency Cumulative Window the time period that is taken into consideration when measuring path congestion consistency CDPCCI. | |
| Cumulative differential path congestion consistency indicator (CDPCCI) represents the situation in which keeps increasing for more than a certain number of times during a recent time period. | |
| Cumulative differential path congestion consistency indicator (CDPCCI) represents the situation in which keeps decreasing for more than a certain number of times during a recent time period. | |
| PSI derived from the CDPCCI indicators proposed. |
References
- Shaikh, A.; Rexford, J.; Shin, K.G. Load-sensitive routing of long-lived IP flows. ACM SIGCOMM Comput. Commun. Rev. 1999, 29, 215–226. [Google Scholar] [CrossRef]
- Zhang, J.; Ye, M.; Guo, Z.; Yen, C.Y.; Chao, H.J. CFR-RL: Traffic Engineering with Reinforcement Learning in SDN. arXiv 2020, arXiv:2004.11986. [Google Scholar] [CrossRef]
- Kandula, S.; Katabi, D.; Davie, B.; Charny, A. Walking the tightrope: Responsive yet stable traffic engineering. ACM SIGCOMM Comput. Commun. Rev. 2005, 35, 253–264. [Google Scholar] [CrossRef]
- Fortz, B.; Thorup, M. Optimizing OSPF/IS-IS weights in a changing world. IEEE J. Sel. Areas Commun. 2002, 20, 756–767. [Google Scholar] [CrossRef] [Green Version]
- Thomas, S.; Thomaskutty, M. Congestion bottleneck avoid routing in wireless sensor networks. Int. J. Electr. Comput. Eng. 2019, 9, 2099–8708. [Google Scholar] [CrossRef]
- Shih-Chun, L.; Akyildiz, I.F.; Pu, W.; Min, L. QoS-aware adaptive routing in multi-layer hierarchical software defined networks: A reinforcement learning approach. In Proceedings of the 2016 IEEE International Conference on Services Computing (SCC), San Francisco, CA, USA, 27 June–2 July 2016; pp. 25–33. [Google Scholar]
- Azzouni, A.; Boutaba, R.; Pujolle, G. NeuRoute: Predictive dynamic routing for software-defined networks. In Proceedings of the 2017 13th International Conference on Network and Service Management (CNSM), Tokyo, Japan, 26–30 November 2017; pp. 1–6. [Google Scholar]
- Moy, J. OSPF Version 2. Technical Report; RFC 2328. 1997. Available online: https://tools.ietf.org/html/rfc2328 (accessed on 23 July 1997).
- Albrightson, R.; Garcia-Luna-Aceves, J.J.; Boyle, J. EIGRP–A Fast Routing Protocol Based on Distance Vectors. In UC Santa Cruz Previously Published Works; 1994; Available online: https://www.ida.liu.se/~TDTS02/papers/eigrp.pdf (accessed on 23 July 1994).
- Yang, Y.; Wang, J. Design guidelines for routing metrics in multihop wireless networks. In Proceedings of the IEEE INFOCOM 2008-The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 1615–1623. [Google Scholar]
- Kamat, P.; Zhang, Y.; Trappe, W.; Ozturk, C. Enhancing source-location privacy in sensor network routing. In Proceedings of the 25th IEEE International Conference on Distributed Computing Systems (ICDCS’05), Columbus, OH, USA, 6–10 June 2005; pp. 599–608. [Google Scholar]
- Ullah, R.; Yasir, F.; Byung-Seo, K. Energy and congestion-aware routing metric for smart grid AMI networks in smart city. IEEE Access 2017, 5, 13799–13810. [Google Scholar] [CrossRef]
- Rajesh, M.; Gnanasekar, J.M. Congestion Control Scheme for Heterogeneous Wireless Ad Hoc Networks Using Self-Adjust Hybrid Model. Int. J. Pure Appl. Math. 2017, 116, 519–536. [Google Scholar]
- Boroojeni, K.G.; Amini, M.H.; Iyengar, S.S.; Rahmani, M.; Pardalos, P.M. An economic dispatch algorithm for congestion management of smart power networks. Energy Syst. 2017, 8, 643–667. [Google Scholar] [CrossRef]
- Ranjana, P.; Jeevani, D.; George, A. Optimized Raco-Car Based Adaptive Routing in Mesh Network. Middle East J. Sci. Res. 2016, 24, 10–14. [Google Scholar]
- Kim, S.; Son, J.; Talukder, A.; Hong, C.S. Congestion prevention mechanism based on Q-leaning for efficient routing in SDN. In Proceedings of the 2016 International Conference on Information Networking (ICOIN), Kota Kinabalu, Malaysia, 13–15 January 2016; pp. 124–128. [Google Scholar]
- Yu, C.; Zhang, Z. Painting on placement: Forecasting routing congestion using conditional generative adversarial nets. In Proceedings of the 56th Annual Design Automation Conference, Las Vegas, NV, USA, 2–6 June 2019; pp. 1–6. [Google Scholar]
- Raman, C.J.; James, V. FCC: Fast congestion control scheme for wireless sensor networks using hybrid optimal routing algorithm. Clust. Comput. 2019, 22, 12701–12711. [Google Scholar] [CrossRef]
- Khatouni, A.S.; Soro, F.; Giordano, D. A Machine Learning Application for Latency Prediction in Operational 4G Networks. In Proceedings of the 2019 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Arlington, VA, USA, 8–12 April 2019; pp. 71–74. [Google Scholar]
- Elwalid, A.; Jin, C.; Low, S.; Widjaja, I. MATE: MPLS adaptive traffic engineering. In Proceedings of the IEEE INFOCOM 2001, Conference on Computer Communications, Twentieth Annual Joint Conference of the IEEE Computer and Communications Society (Cat. No. 01CH37213), Anchorage, AK, USA, 22–26 April 2001; Volume 3, pp. 1300–1309. [Google Scholar]
- Kar, K.; Kodialam, M.; Lakshman, T.V. Minimum interference routing of bandwidth guaranteed tunnels with MPLS traffic engineering applications. IEEE J. Sel. Areas Commun. 2000, 18, 2566–2579. [Google Scholar] [CrossRef] [Green Version]
- Srivastava, S.; Medhi, D. Traffic Engineering of MPLS Backbone Networks in the Presence of Heterogeneous Streams. Comput. Netw. 2009, 53, 2688–2702. [Google Scholar] [CrossRef] [Green Version]
- Papagiannaki, K.; Taft, N.; Zhang, Z.; Diot, C. Long-term forecasting of Internet backbone traffic: Observations and initial models. In Proceedings of the IEEE INFOCOM 2003. Twenty-second Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No. 03CH37428), San Francisco, CA, USA, 30 March–3 April 2003; Volume 2, pp. 1178–1188. [Google Scholar]
- Krithikaivasan, B.; Zeng, Y.; Deka, K.; Medhi, D. ARCH-Based Traffic Forecasting and Dynamic Bandwidth Provisioning for Periodically Measured Nonstationary Traffic. IEEE/ACM Trans. Netw. 2007, 15, 683–696. [Google Scholar] [CrossRef]
- Lakhina, A.; Papagiannaki, K.; Crovella, M.; Diot, C.; Kolaczyk, E.D.; Taft, N. Structural analysis of network traffic flows. In Proceedings of the Joint International Conference on Measurement and Modeling of Computer Systems, New York, NY, USA, 12–16 June 2004; Volume 32, pp. 61–72. [Google Scholar]
- Zhang, Y.; Roughan, M.; Duffield, N.; Greenberg, A. Fast accurate computation of large-scale IP traffic matrices from link loads. ACM SIGMETRICS Perform. Eval. Rev. 2003, 31, 206–217. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0 | 1 | – | |
| 0 | 1 | 1 | 0 |
| 0 | 1 | 0 | 0 |
| 1 | 0 | 0 | 1 |
| 1 | 0 | 1 | 1 |
| 1 | 1 | – |
| Parameter | Value |
|---|---|
| 0 ms | |
| 5 s | |
| T | 15 s |
| 2 | |
| 3 | |
| 2 | |
| 3 |
| Parameter | Exp. 1 | Exp. 2 | Exp. 3_1 | Exp. 3_2 |
|---|---|---|---|---|
| 20 ms | 20 ms | 20 ms | 20 ms | |
| 5 s | 5 s | 5 s | 5 s | |
| T | 20 steps | 20 steps | 20 steps | 20 steps |
| 6 | 6 | 6 | 6 | |
| 20 | 20 | 20 | 20 | |
| 7 | 7 | 7 | 6 | |
| 20 | 10 | 20 | 20 |
| Data Range | True Rate | False Rate | |||
|---|---|---|---|---|---|
| 0 | 2–125 | 9 | 115 | ||
| 1 | 126–197 | 25 | 47 | ||
| 0 | 198–210 | 7 | 6 | ||
| 1 | 211–213 | 1 | 2 | ||
| 0 | 214–218 | 2 | 3 | ||
| 1 | 219–249 | 9 | 22 | ||
| 0 | 250–583 | 35 | 299 | ||
| 1 | 584–979 | 160 | 236 | ||
| 0 | 980–1279 | 95 | 205 | ||
| 1 | 1280–1381 | 94 | 8 | ||
| 0 | 1382–1672 | 103 | 188 | ||
| 1 | 1673–1811 | 110 | 29 | ||
| 0 | 1812–2088 | 83 | 194 | ||
| 1 | 2089–2194 | 84 | 22 | ||
| 0 | 2195–2227 | 23 | 10 | ||
| 1 | 2228–2236 | 7 | 2 | ||
| 0 | 2237–2500 | 82 | 182 | ||
| 1 | 2501–2606 | 87 | 19 | ||
| 0 | 2607–2629 | 13 | 10 | ||
| 1 | 2630–2653 | 16 | 8 | ||
| 0 | 2654–3197 | 77 | 467 |
| Data Range | True Rate | False Rate | |||
|---|---|---|---|---|---|
| 0 | 2–1250 | 120 | 1129 | ||
| 1 | 1251–1380 | 114 | 16 | ||
| 0 | 1381–1649 | 77 | 192 | ||
| 1 | 1650–1676 | 15 | 12 | ||
| 0 | 1677–1689 | 4 | 9 | ||
| 1 | 1690–1779 | 75 | 15 | ||
| 0 | 1780–1799 | 14 | 6 | ||
| 1 | 1800–1813 | 4 | 10 | ||
| 0 | 1814–1858 | 27 | 18 | ||
| 1 | 1859–1875 | 8 | 9 | ||
| 0 | 1876–2095 | 57 | 163 | ||
| 1 | 2096–2180 | 60 | 25 | ||
| 0 | 2181–2200 | 13 | 7 | ||
| 1 | 2201–2223 | 12 | 11 | ||
| 0 | 2224–2476 | 68 | 185 | ||
| 1 | 2477–2532 | 40 | 16 | ||
| 0 | 2533–2584 | 21 | 31 | ||
| 1 | 2585–2976 | 143 | 249 | ||
| 0 | 2977–3339 | 75 | 288 |
| Data Range | True Rate | False Rate | |||
|---|---|---|---|---|---|
| 0 | 2–928 | 107 | 820 | ||
| 1 | 929–1085 | 92 | 79 | ||
| 0 | 1086–1125 | 10 | 30 | ||
| 1 | 1126–2173 | 281 | 767 | ||
| 0 | 2174–3303 | 180 | 950 |
| Data Range | True Rate | False Rate | |||
|---|---|---|---|---|---|
| 0 | 2–928 | 107 | 820 | ||
| 1 | 929–973 | 25 | 20 | ||
| 0 | 974–980 | 7 | 0 | ||
| 1 | 981–987 | 2 | 5 | ||
| 0 | 988–1352 | 102 | 263 | ||
| 1 | 1353–1391 | 20 | 19 | ||
| 0 | 1392–1750 | 85 | 274 | ||
| 1 | 1751–1815 | 38 | 27 | ||
| 0 | 1816–2144 | 67 | 262 | ||
| 1 | 2145–2173 | 23 | 6 | ||
| 0 | 2174–3303 | 180 | 950 |
| True | False | Accuracy Improvement | ||
|---|---|---|---|---|
| Exp. 1 | PSI = 1 | |||
| PSI = 0 | ||||
| Exp. 2 | PSI = 1 | |||
| PSI = 0 | ||||
| Exp. 3_1 | PSI = 1 | |||
| PSI = 0 | ||||
| Exp. 3_2 | PSI = 1 | |||
| PSI = 0 |
| Experiment | Time Interval between Path Swaps | Variance of Latency Difference |
|---|---|---|
| Exp. 1 | 761.5 s | 31.983 |
| Exp. 2 | 775 s | 23.33 |
| Exp. 3_1 | 3303 s | 12.16 |
| Exp. 3_2 | 1500 s | 12.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Q.; Pezaros, D. A Prediction-Based Model for Consistent Adaptive Routing in Back-Bone Networks at Extreme Situations. Electronics 2020, 9, 2146. https://doi.org/10.3390/electronics9122146
Zhou Q, Pezaros D. A Prediction-Based Model for Consistent Adaptive Routing in Back-Bone Networks at Extreme Situations. Electronics. 2020; 9(12):2146. https://doi.org/10.3390/electronics9122146
Chicago/Turabian StyleZhou, Qianru, and Dimitrios Pezaros. 2020. "A Prediction-Based Model for Consistent Adaptive Routing in Back-Bone Networks at Extreme Situations" Electronics 9, no. 12: 2146. https://doi.org/10.3390/electronics9122146
APA StyleZhou, Q., & Pezaros, D. (2020). A Prediction-Based Model for Consistent Adaptive Routing in Back-Bone Networks at Extreme Situations. Electronics, 9(12), 2146. https://doi.org/10.3390/electronics9122146