Flux Weakening Control Technique without Look-Up Tables for SynRMs Based on Flux Saturation Models


Abstract
:1. Introduction
2. SynRM Model
2.1. Basic Equation
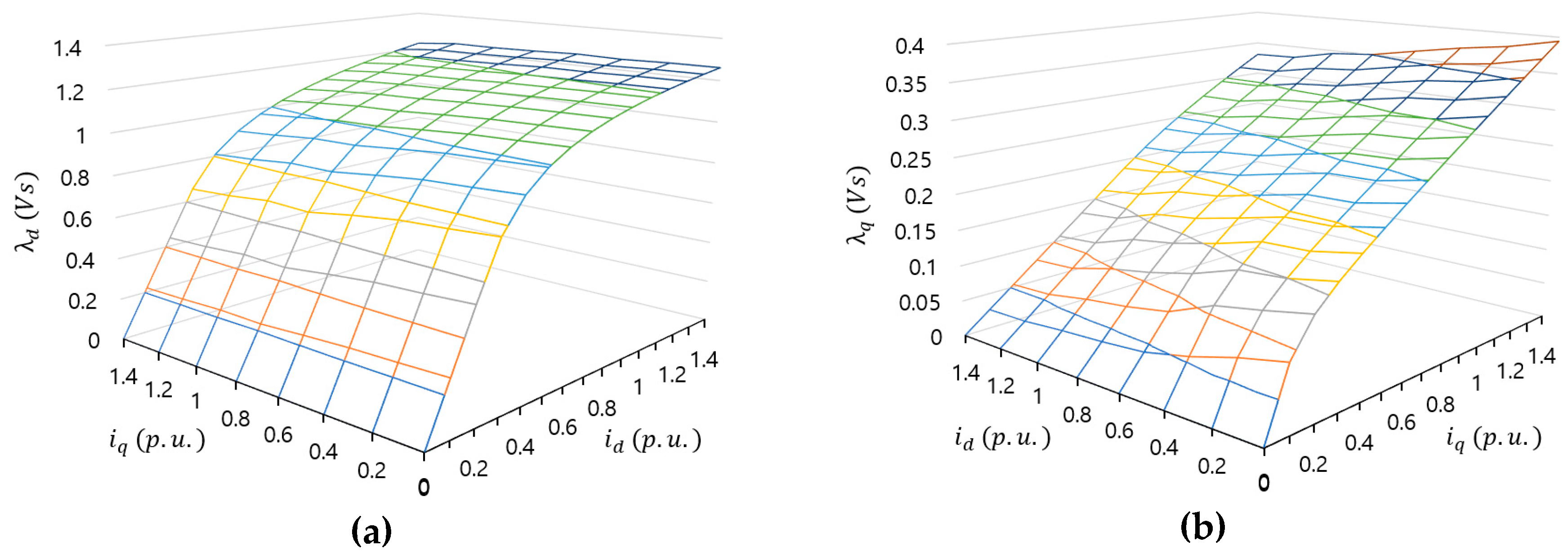
2.2. Flux Saturation Model
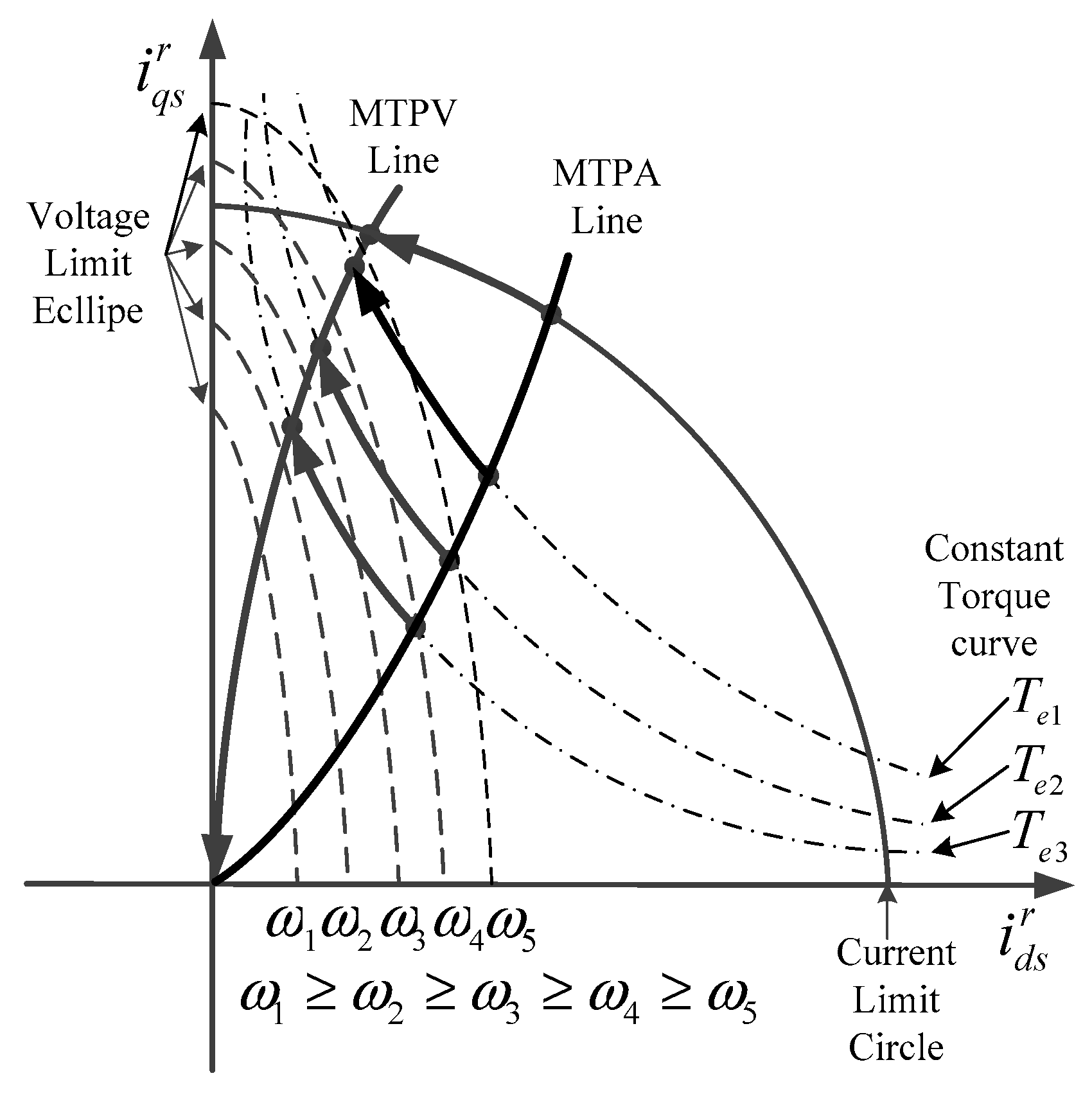
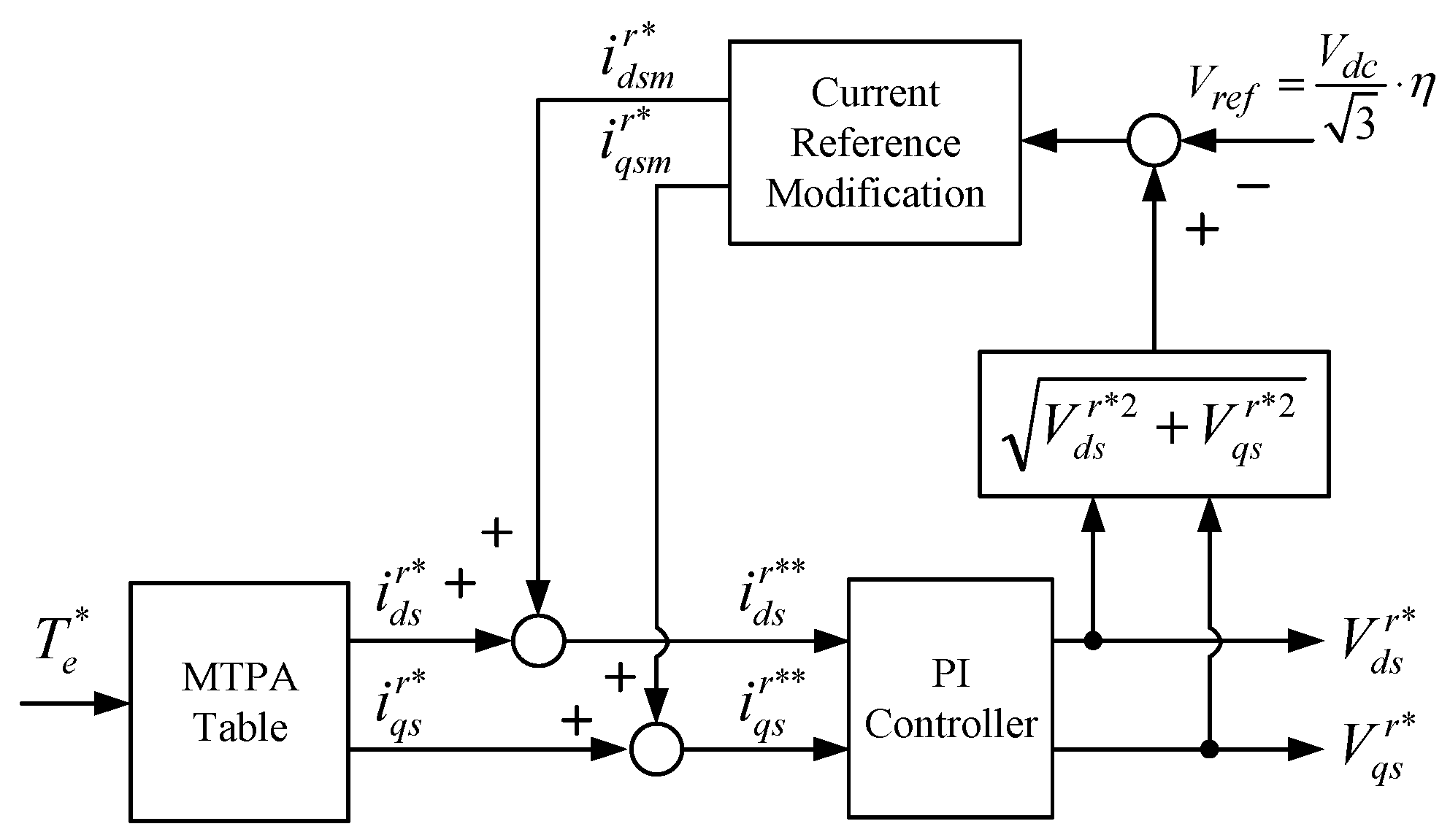
3. Proposed Flux Weakening Control Algorithm
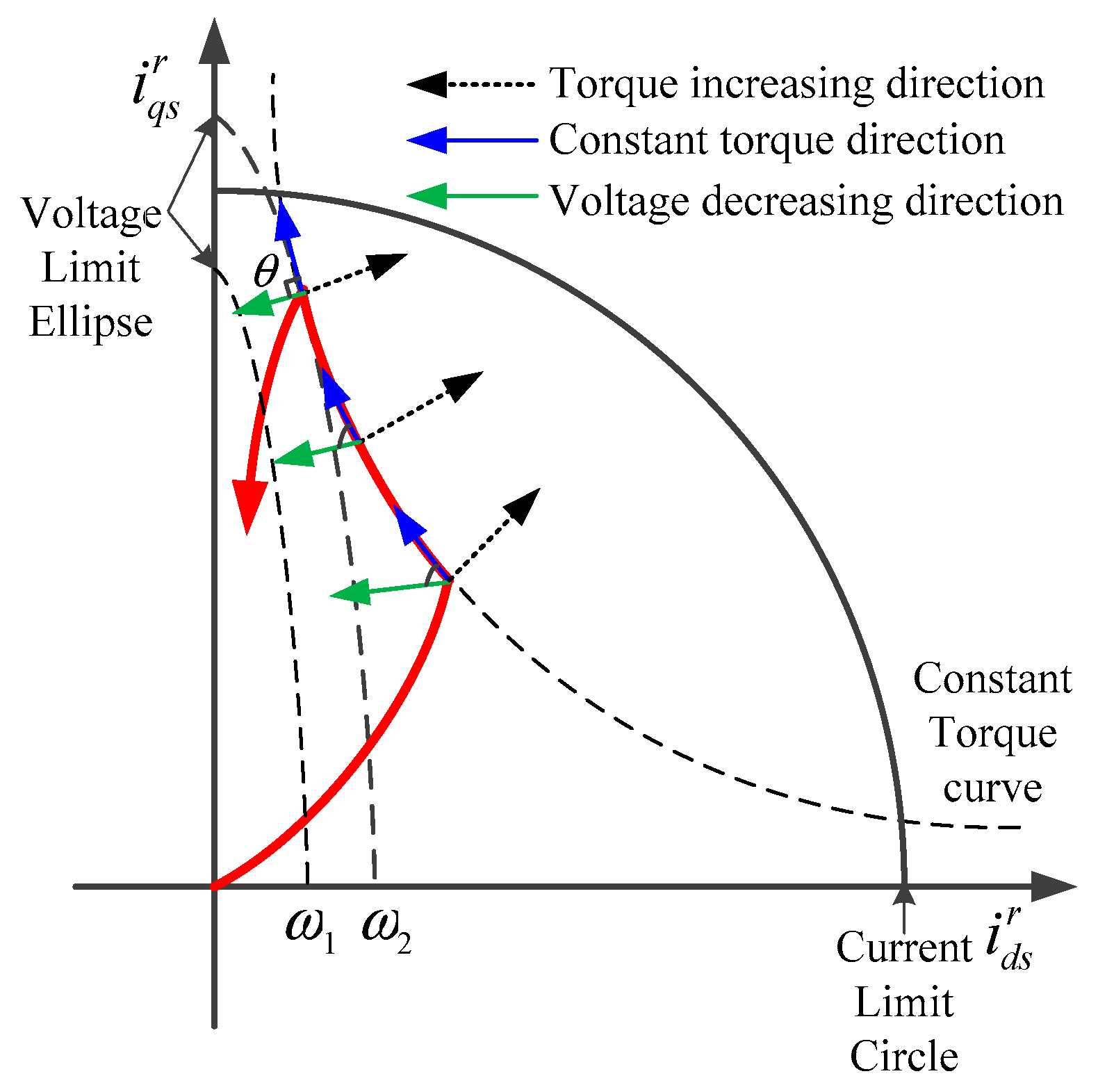
3.1. Determination of Directions
3.1.1. Constant Torque Direction
3.1.2. Voltage Decreasing Direction
3.1.3. MTPV Direction
3.2. Determination of the Magnitude of a Change for Reference Modification
4. Simulations and Experiments
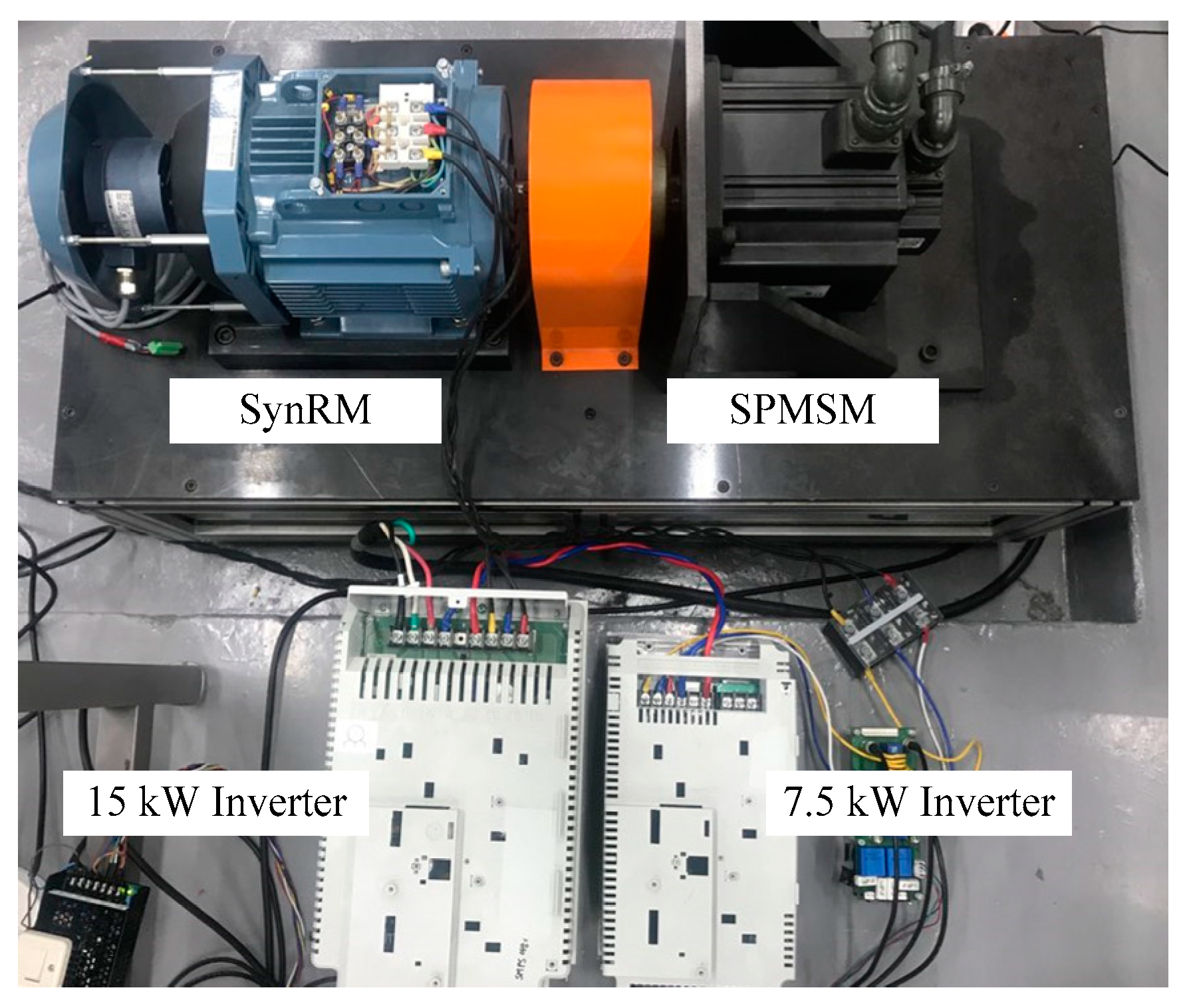
4.1. Experimental Equipment and Conditions
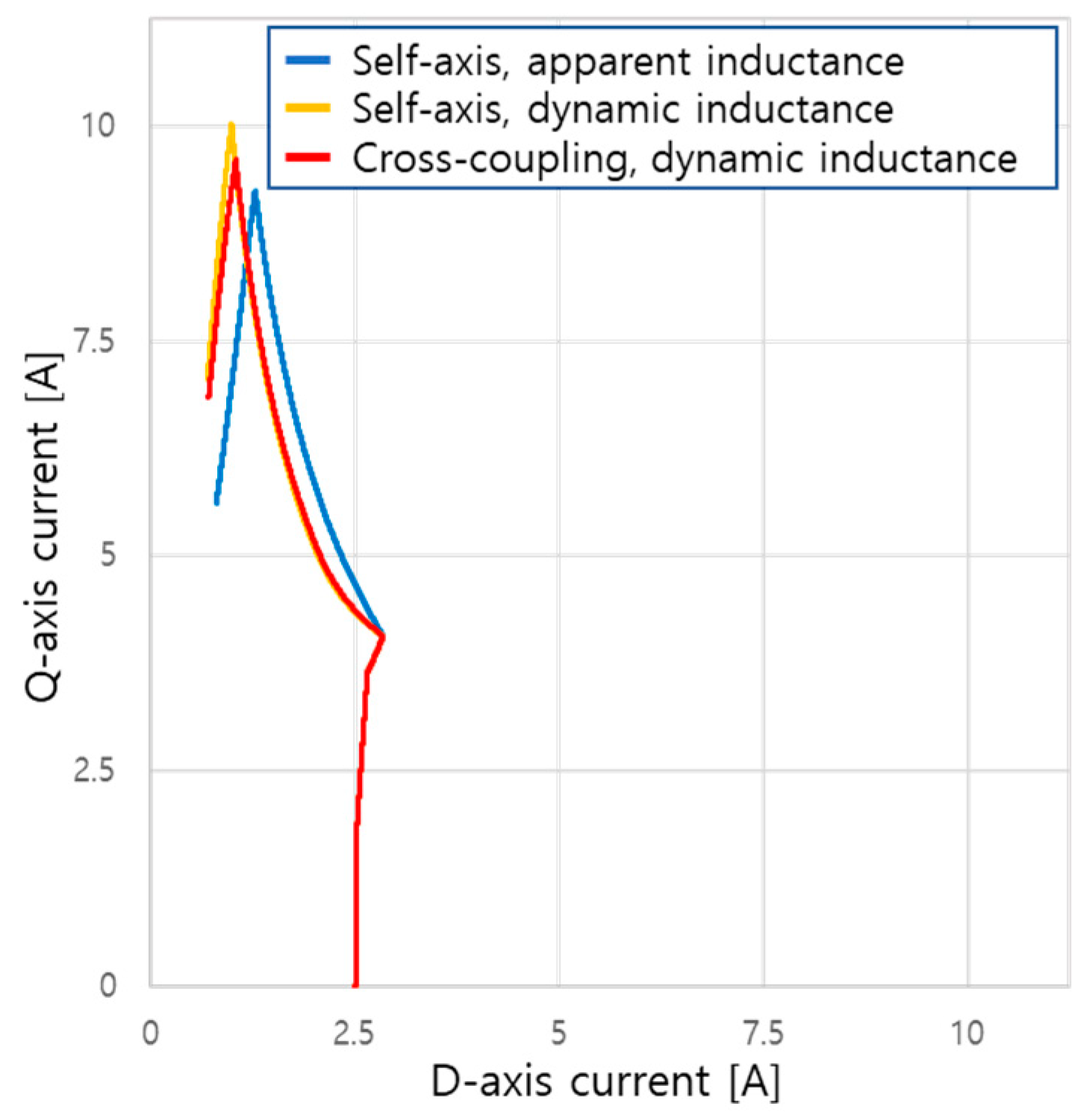
4.2. Results and Discussion
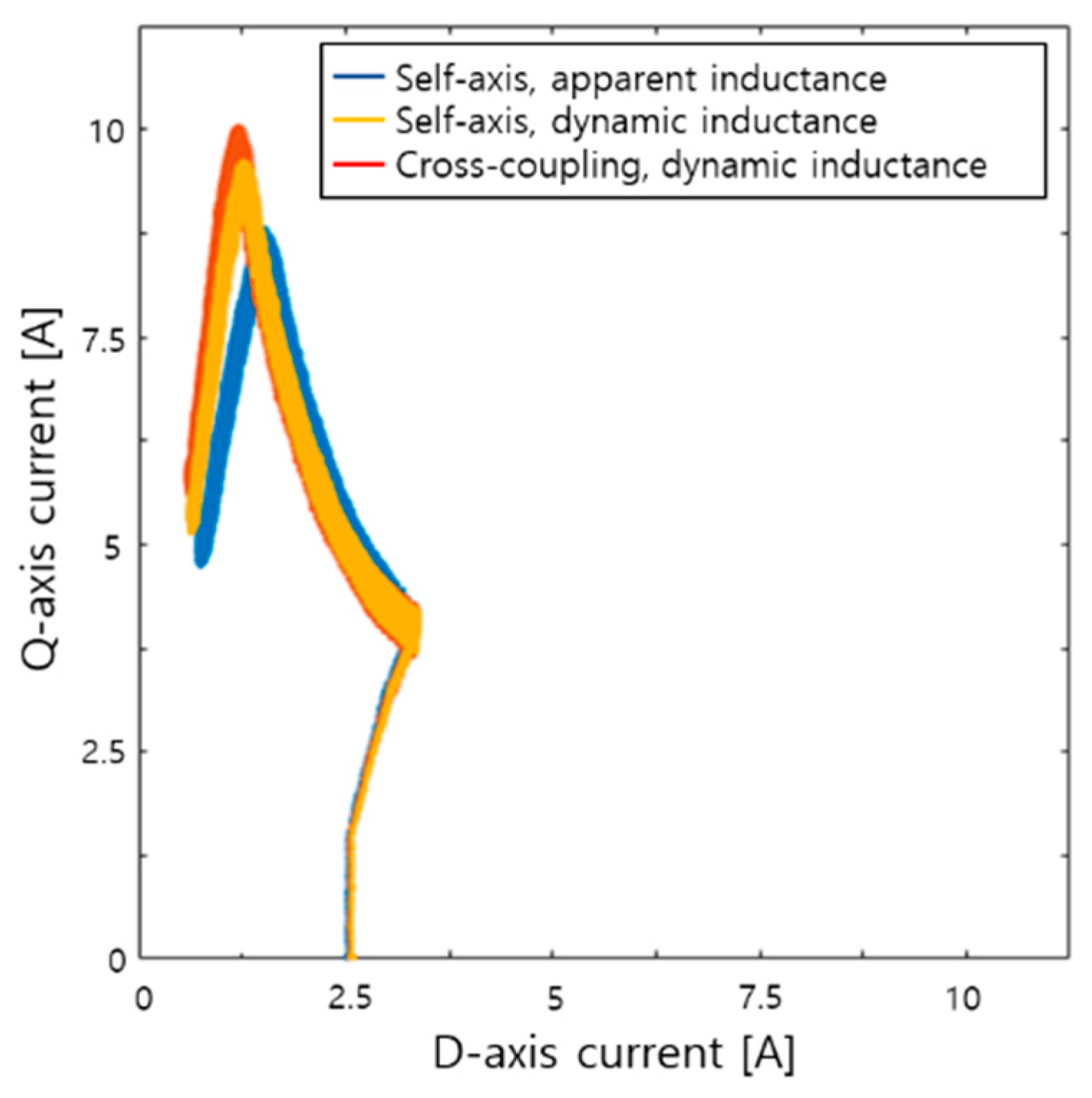
- using the apparent inductance of the self-axis flux saturation model,
- using the dynamic inductance of the self-axis flux saturation model, and
- using the dynamic inductance of the cross-coupled flux saturation model.
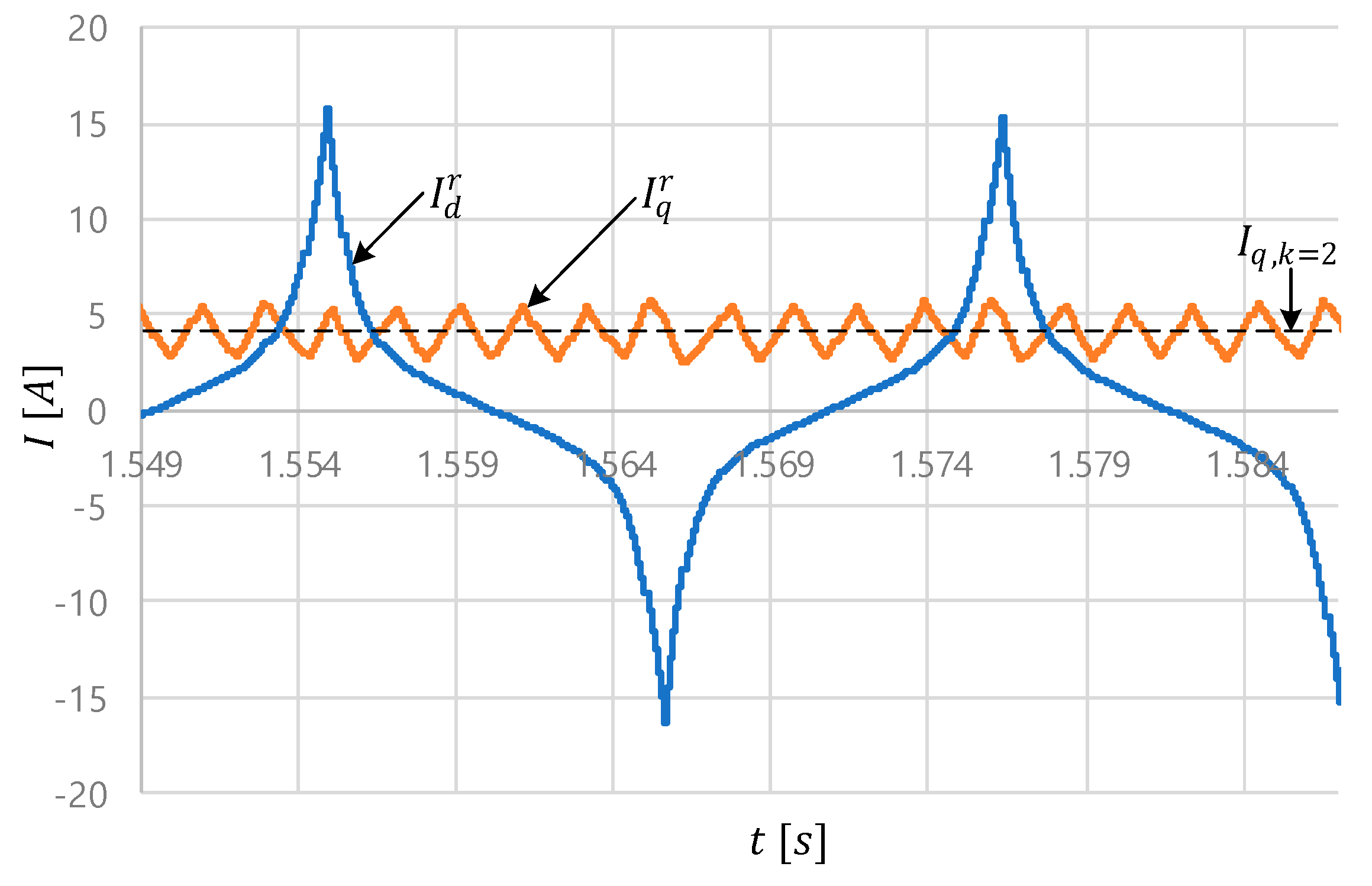
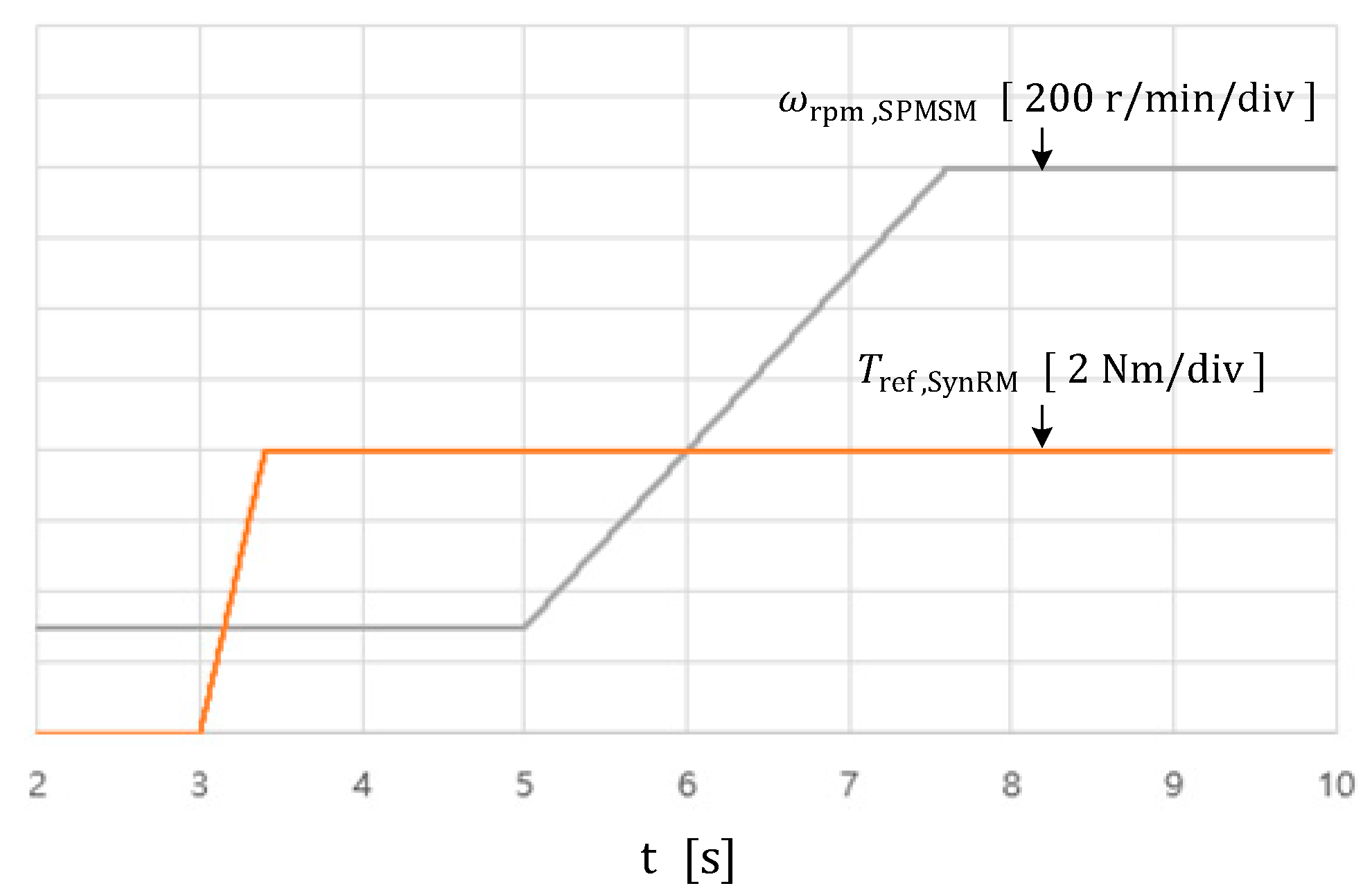
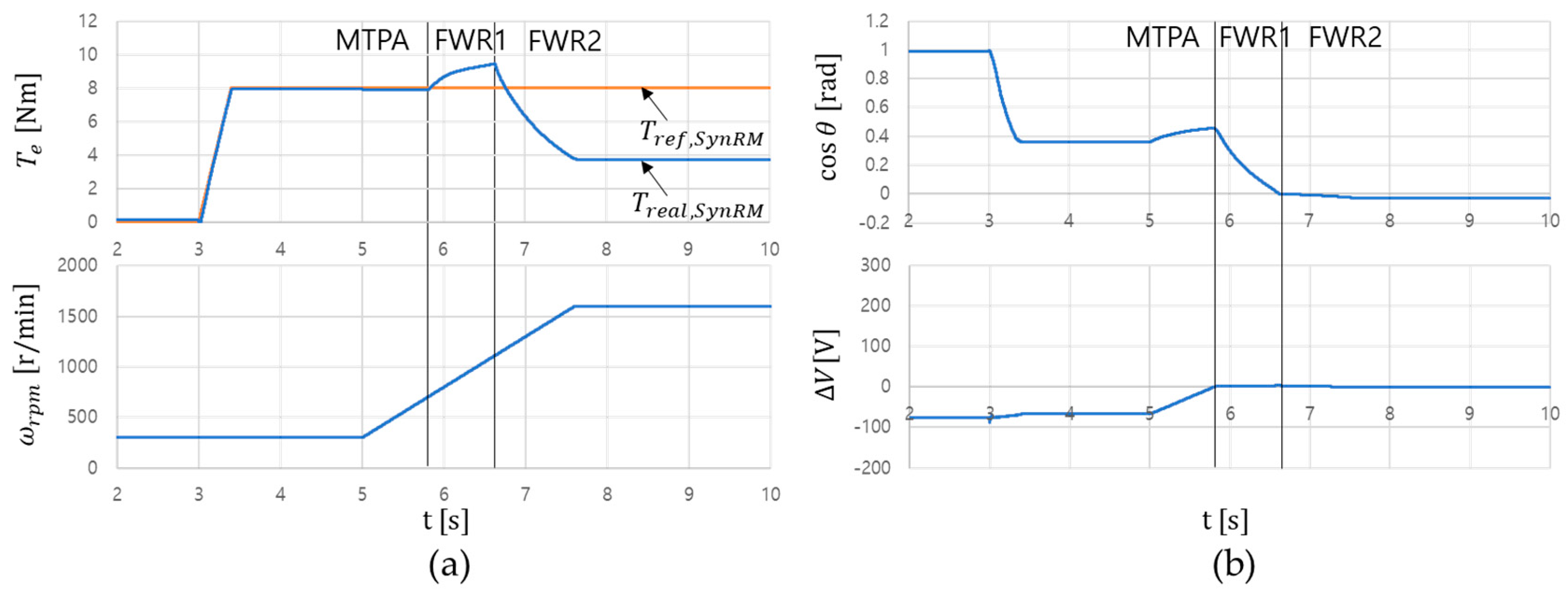
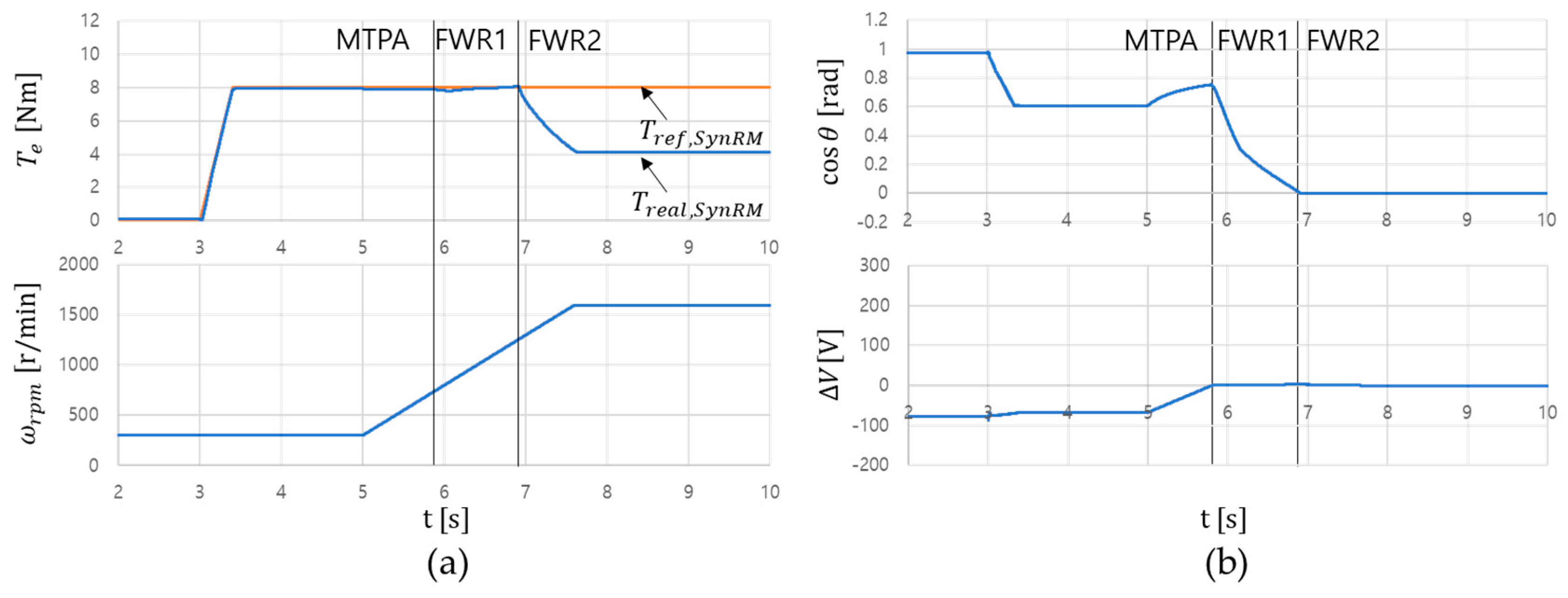
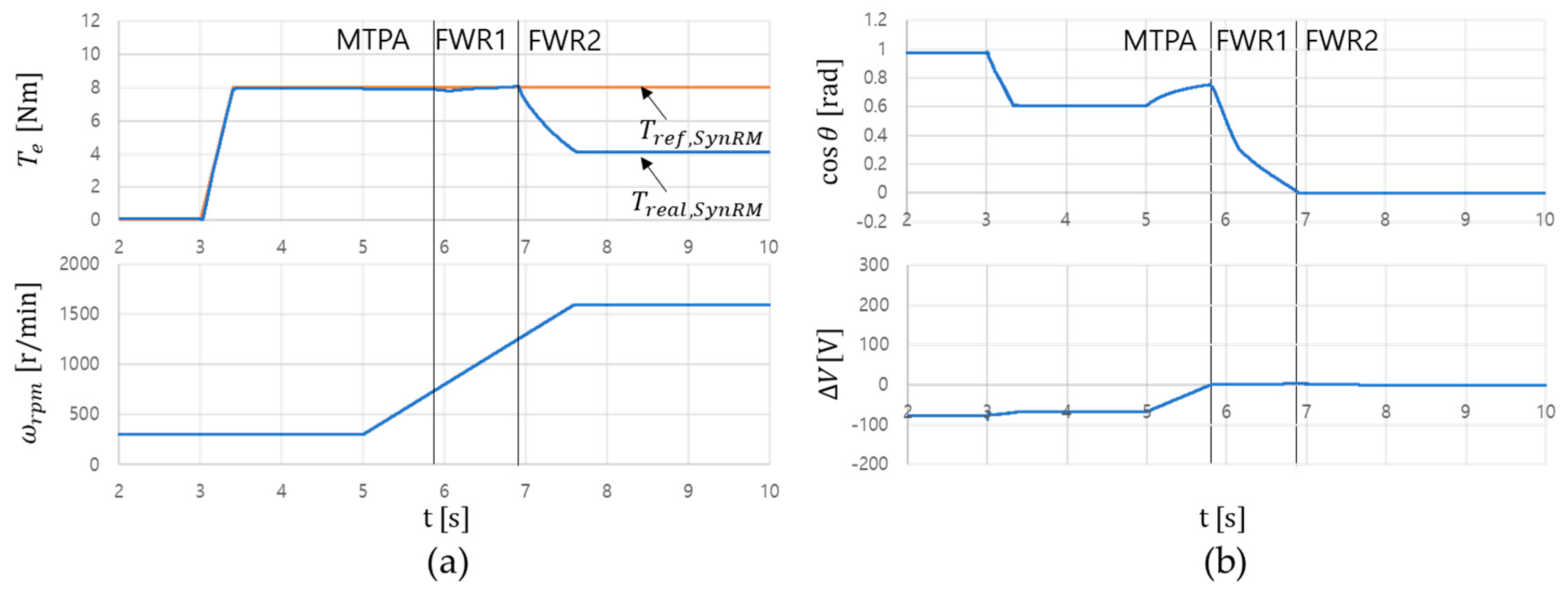
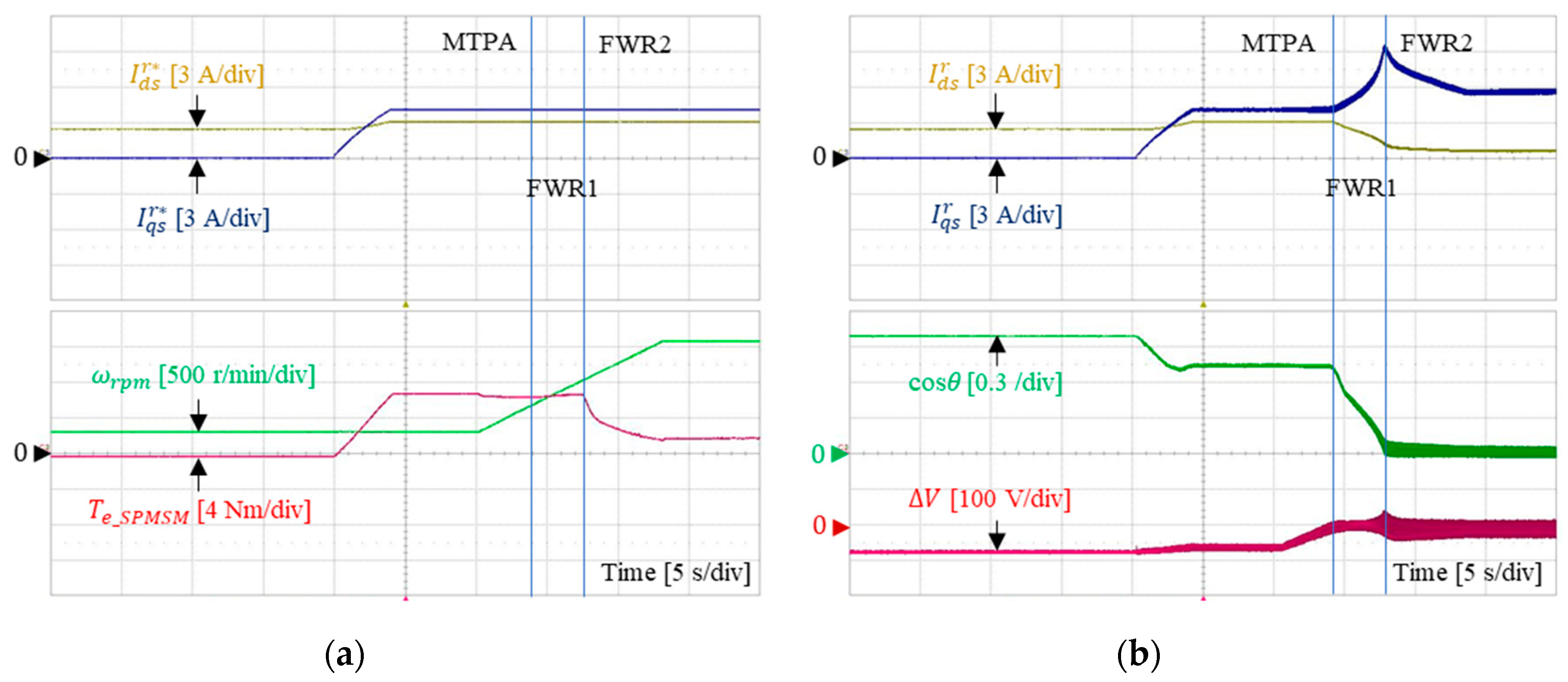
4.2.1. Simulations
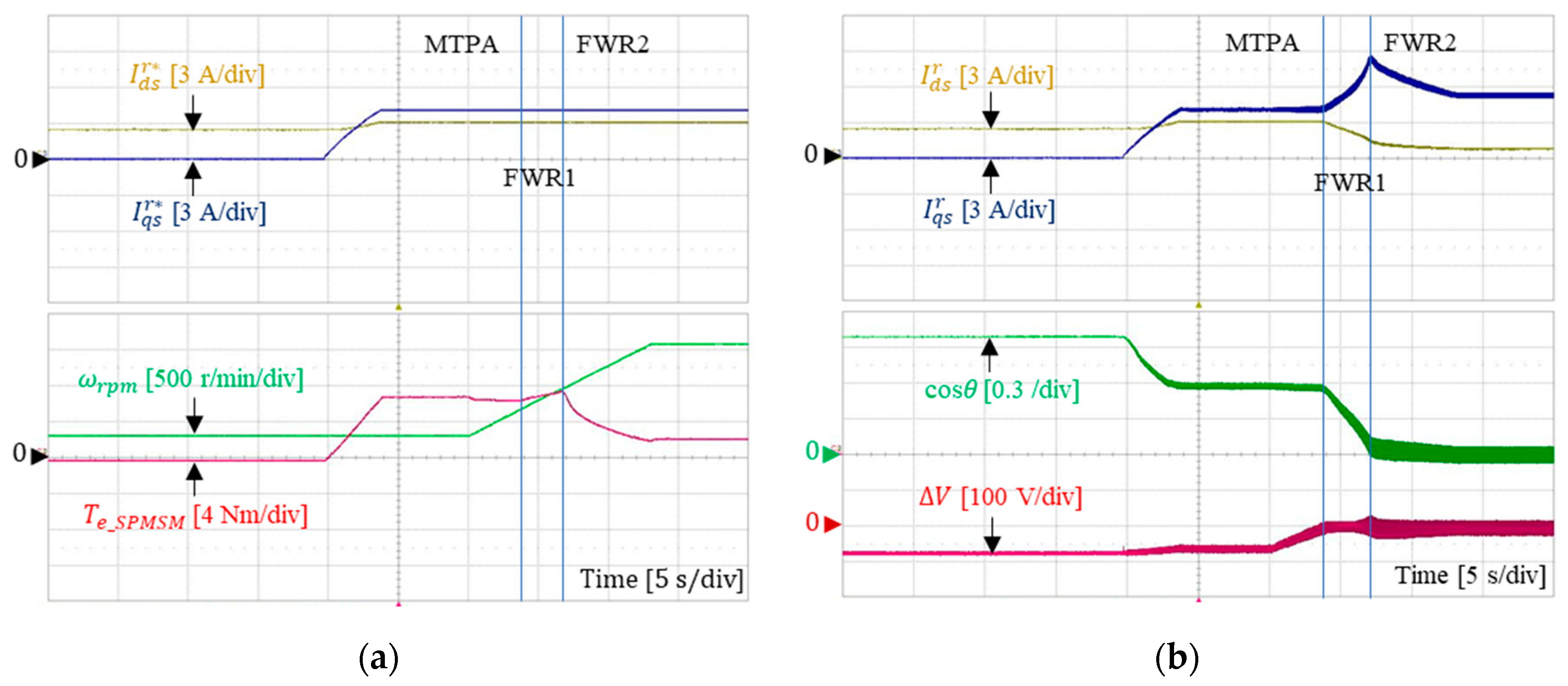
4.2.2. Experiments
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Boazzo, B.; Vagati, A.; Pellegrino, G.; Armando, E.; Guglielmi, P. Multipolar Ferrite-Assisted Synchronous Reluctance Machines: A General Design Approach. IEEE Trans. Ind. Electron. 2015, 62, 832–845. [Google Scholar] [CrossRef]
- Capolino, G.; Cavagnino, A. New Trends in Electrical Machines Technology—Part II. IEEE Trans. Ind. Electron. 2014, 61, 4931–4936. [Google Scholar] [CrossRef]
- Vagati, A. The synchronous reluctance solution: A new alternative in AC drives. In Proceedings of the IECON’94: 20th International Conference on Industrial Electronics, Control and Instrumentation, Bologna, Italy, 5–9 September 1994; pp. 1–13. [Google Scholar]
- Bianchi, N.; Bolognani, S. Magnetic models of saturated interior permanent magnet motors based on finite element analysis. In Proceedings of the 1998 IEEE Industry Applications Conference, St. Louis, MO, USA, 12–15 October 1998; pp. 27–34. [Google Scholar]
- Iwaji, Y.; Nakatsugawa, J.; Sakai, T.; Aoyagi, S.; Nagura, H. Motor drive system using nonlinear mathematical model for permanent magnet synchronous motors. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014-ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 2451–2456. [Google Scholar]
- Hinkkanen, M.; Pescetto, P.; Mölsä, E.; Saarakkala, S.E.; Pellegrino, G.; Bojoi, R. Sensorless Self-Commissioning of Synchronous Reluctance Motors at Standstill Without Rotor Locking. IEEE Trans. Ind. Appl. 2017, 53, 2120–2129. [Google Scholar] [CrossRef] [Green Version]
- Rahman, K.M.; Hiti, S. Identification of machine parameters of a synchronous motor. IEEE Trans. Ind. Appl. 2005, 41, 557–565. [Google Scholar] [CrossRef]
- Armando, E.; Bojoi, R.I.; Guglielmi, P.; Pellegrino, G.; Pastorelli, M. Experimental Identification of the Magnetic Model of Synchronous Machines. IEEE Trans. Ind. Appl. 2013, 49, 2116–2125. [Google Scholar] [CrossRef]
- Qu, Z.; Tuovinen, T.; Hinkkanen, M. Inclusion of magnetic saturation in dynamic models of synchronous reluctance motors. In Proceedings of the XXth International Conference on Electrical Machines (ICEM), Marseille, France, 2–5 September 2012; pp. 994–1000. [Google Scholar]
- Pellegrino, G.; Boazzo, B.; Jahns, T.M. Magnetic Model Self-Identification for PM Synchronous Machine Drives. IEEE Trans. Ind. Appl. 2015, 51, 2246–2254. [Google Scholar] [CrossRef] [Green Version]
- Odhano, S.A.; Bojoi, R.; Roşu, Ş.G.; Tenconi, A. Identification of the Magnetic Model of Permanent-Magnet Synchronous Machines Using DC-Biased Low-Frequency AC Signal Injection. IEEE Trans Ind. Appl. 2015, 51, 3208–3215. [Google Scholar] [CrossRef]
- Hanic, Z.; Vrazic, M.; Maljkovic, Z. Steady-state synchronous machine model which incorporates saturation and cross-magnetization effects. In Proceedings of the 2013 Fourth International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), Istanbul, Turkey, 13–17 May 2013; pp. 1553–1557. [Google Scholar]
- Stumberger, B.; Stumberger, G.; Dolinar, D.; Hamler, A.; Trlep, M. Evaluation of saturation and cross-magnetization effects in interior permanent-magnet synchronous motor. IEEE Trans. Ind. Appl. 2003, 39, 1264–1271. [Google Scholar] [CrossRef]
- Kilthau, A.; Pacas, J.M. Parameter-measurement and control of the synchronous reluctance machine including cross saturation. In Proceedings of the 2001 IEEE Industry Applications Society 36th Annual Meeting—IAS’01, Chicago, IL, USA, 30 September–4 October 2001; pp. 2302–2309. [Google Scholar]
- Vagati, A.; Pastorelli, M.; Franceschini, G.; Drogoreanu, V. Flux-observer-based high-performance control of synchronous reluctance motors by including cross saturation. IEEE Trans. Ind. Appl. 1999, 35, 597–605. [Google Scholar] [CrossRef]
- Odhano, S.A.; Giangrande, P.; Bojoi, R.I.; Gerada, C. Self-Commissioning of Interior Permanent—Magnet Synchronous Motor Drives with High-Frequency Current Injection. IEEE Trans. Ind. Appl. 2014, 50, 3295–3303. [Google Scholar] [CrossRef]
- Awan, H.A.A.; Song, Z.; Saarakkala, S.E.; Hinkkanen, M. Optimal Torque Control of Saturated Synchronous Motors: Plug-and-Play Method. IEEE Trans. Ind. Appl. 2018, 54, 6110–6120. [Google Scholar] [CrossRef] [Green Version]
- Bedetti, N.; Calligaro, S.; Petrella, R. Stand-still self-identification of flux characteristics for synchronous reluctance machines using novel saturation approximating function and multiple linear regression. IEEE Trans. Ind. Appl. 2016, 52, 083–3092. [Google Scholar] [CrossRef]
- Bae, B.-H.; Sul, S.-K. A compensation method for time delay of full-digital synchronous frame current regulator of PWM AC drives. IEEE Trans. Ind. Appl. 2003, 39, 802–810. [Google Scholar] [CrossRef]
- Chang, S.-H.; Chen, P.-Y. Self-tuning gains of PI controllers for current control in a PMSM. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010; pp. 1282–1286. [Google Scholar]
- Tursini, M.; Parasiliti, F.; Zhang, D. Real-time gain tuning of PI controllers for high-performance PMSM drives. IEEE Trans. Ind. Appl. 2002, 38, 1018–1026. [Google Scholar] [CrossRef]
- Awan, H.A.A.; Saarakkala, S.E.; Hinkkanen, M. Current Control of Saturated Synchronous Motors. In Proceedings of the Tenth Annual IEEE Energy Conversion Congress and Exposition (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 6953–6959. [Google Scholar]
- Hinkkanen, M.; Qu, Z.; Awan, H.A.A.; Tuovinen, T.; Briz, F. Current control for IPMSM drives: Direct discrete-time pole-placement design. In Proceedings of the 2015 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (Wemdcd), Torino, Italy, 26–27 March 2015; pp. 156–164. [Google Scholar]
- Mansouri, B.; Piaton, J. Magnetic Saturation Aids Flux-Weakening Control: Using Lookup Tables Based on a Static Method of Identification for Nonlinear Permanent-Magnet Synchronous Motors. IEEE Electrification Magazine 2017, 5, 53–61. [Google Scholar] [CrossRef]
- Trancho, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Juergens, J.; Marengo, L.; Fricasse, A.; Gragger, J.V. PM-Assisted Synchronous Reluctance Machine Flux Weakening Control for EV and HEV Applications. IEEE Trans. Ind. Electron. 2018, 65, 2986–2995. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Nam, K.; Choi, S.; Kwon, S. A Lookup Table Based Loss Minimizing Control for FCEV Permanent Magnet Synchronous Motors. In Proceedings of the 2007 IEEE Vehicle Power and Propulsion Conference (VPPC), Arlington, TX, USA, 9–12 September 2007; pp. 175–179. [Google Scholar]
- Bae, B.-H.; Patel, N.; Schulz, S.; Sul, S.-K. New field weakening technique for high saliency interior permanent magnet motor. In Proceedings of the 38th IAS Annual Meeting on Conference Record of the Industry Applications Conference, Salt Lake City, UT, USA, 12–16 October 2003; pp. 898–905. [Google Scholar]
- Awan, H.A.A.; Hinkkanen, M.; Bojoi, R.; Pellegrino, G. Stator-Flux-Oriented Control of Synchronous Motors: Design and Implementation. In Proceedings of the Tenth Annual IEEE Energy Conversion Congress and Exposition (ECCE 2018), Portland, OR, USA, 23–27 September 2018; pp. 6571–6577. [Google Scholar]
- Ferdous, S.M.; Garcia, P.; Oninda, M.A.M.; Hoque, M.A. MTPA and Field Weakening Control of Synchronous Reluctance motor. In Proceedings of the 9th International Conference on Electrical and Computer Engineering, Dhaka, Bangladesh, 20–22 December 2016; pp. 598–601. [Google Scholar]
- Ioannou, P.A.; Sun, J. Robust Adaptive Control; Prentice-Hall: Upper Saddle River, NJ, USA, 1996; pp. 785–786. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nominal Parameter | Value [unit] |
|---|---|
| Rated power | 3.0 [kW] |
| Rated speed | 1500 [r/min] |
| Number of poles | 4 |
| Rated voltage | 400 [] |
| Rated current | 7 [] |
| Stator resistance | 1.9059 [Ω] |
| d-axis inductance | 220 [mH] |
| q-axis inductance | 40 [mH] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Woo, T.-G.; Lee, S.-H.; Lee, H.-J.; Yoon, Y.-D. Flux Weakening Control Technique without Look-Up Tables for SynRMs Based on Flux Saturation Models. Electronics 2020, 9, 218. https://doi.org/10.3390/electronics9020218
Woo T-G, Lee S-H, Lee H-J, Yoon Y-D. Flux Weakening Control Technique without Look-Up Tables for SynRMs Based on Flux Saturation Models. Electronics. 2020; 9(2):218. https://doi.org/10.3390/electronics9020218
Chicago/Turabian StyleWoo, Tae-Gyeom, Sang-Hoon Lee, Hak-Jun Lee, and Young-Doo Yoon. 2020. "Flux Weakening Control Technique without Look-Up Tables for SynRMs Based on Flux Saturation Models" Electronics 9, no. 2: 218. https://doi.org/10.3390/electronics9020218
APA StyleWoo, T.-G., Lee, S.-H., Lee, H.-J., & Yoon, Y.-D. (2020). Flux Weakening Control Technique without Look-Up Tables for SynRMs Based on Flux Saturation Models. Electronics, 9(2), 218. https://doi.org/10.3390/electronics9020218