Trajectory Planning Algorithm of UAV Based on System Positioning Accuracy Constraints


Abstract
:1. Introduction
2. Background
2.1. Problem Statement
2.2. Model Assumptions and Multiple Constraints
3. Problem 1
3.1. Multi-Constraints Optimization Problem
3.1.1. Correction Area
3.1.2. Objective Function
3.1.3. Multi-Constraints
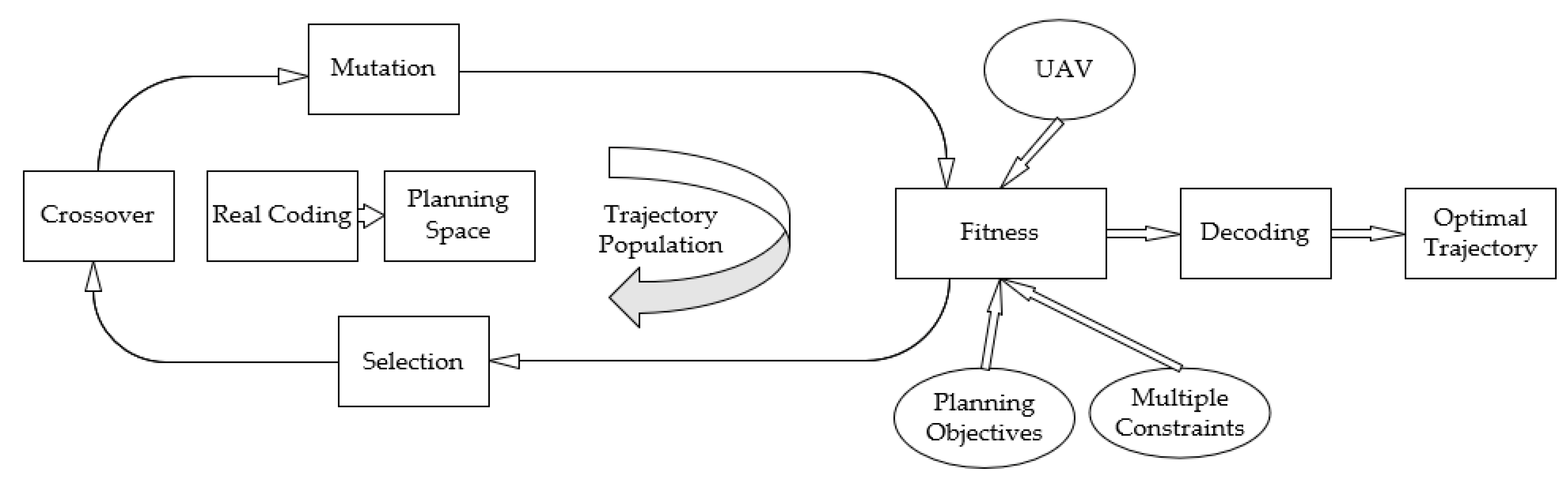
3.2. Trajectory Planning Algorithm for the Problem 1
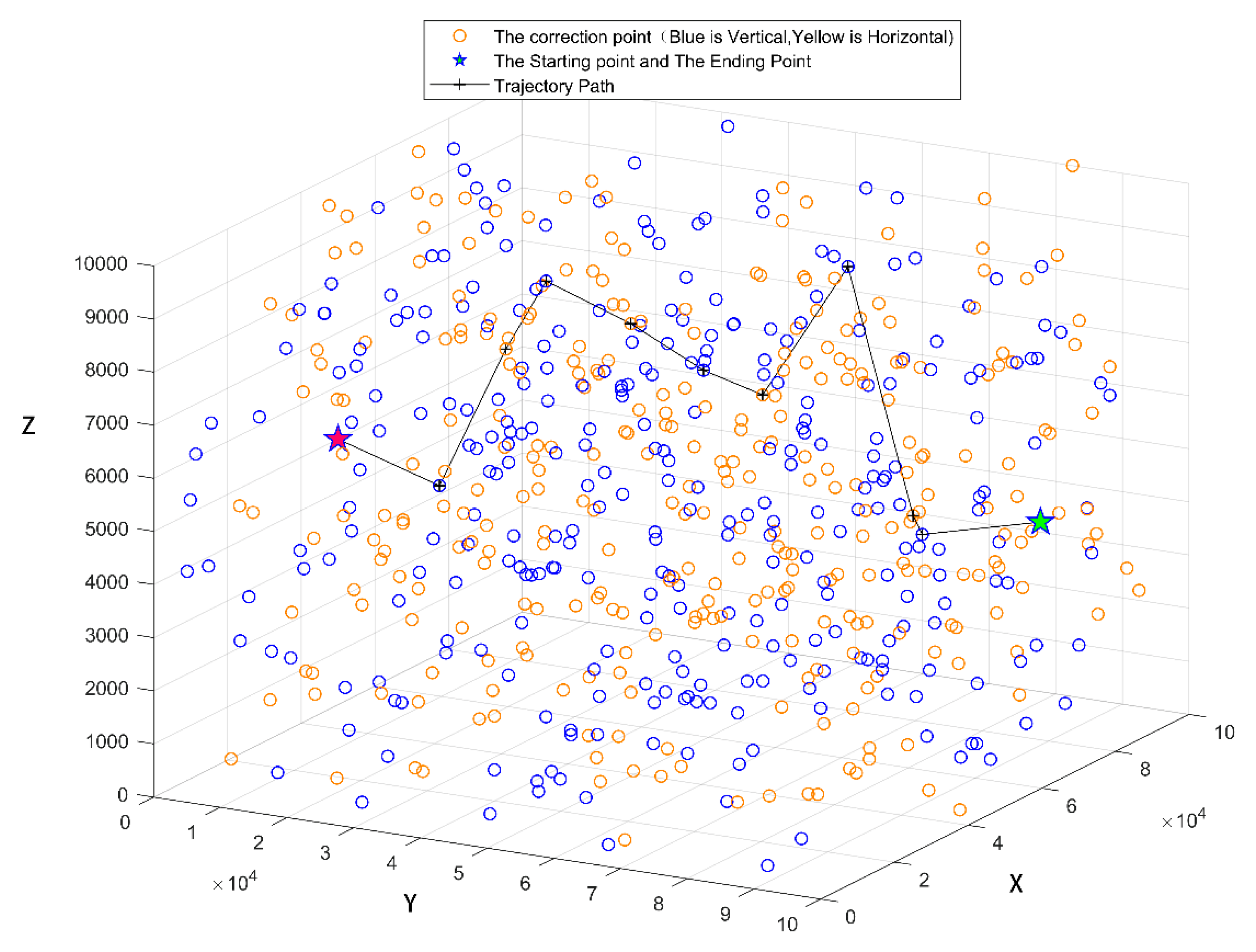
3.3. Simulation Results and Analysis of the Trajectory Planning Algorithm for the Problem 1
4. Problem 2
4.1. Multi-Constraints Optimization Problem
4.1.1. Objective Function
4.1.2. Multi-Constraints
4.2. Trajectory Planning Algorithm for the Problem 2
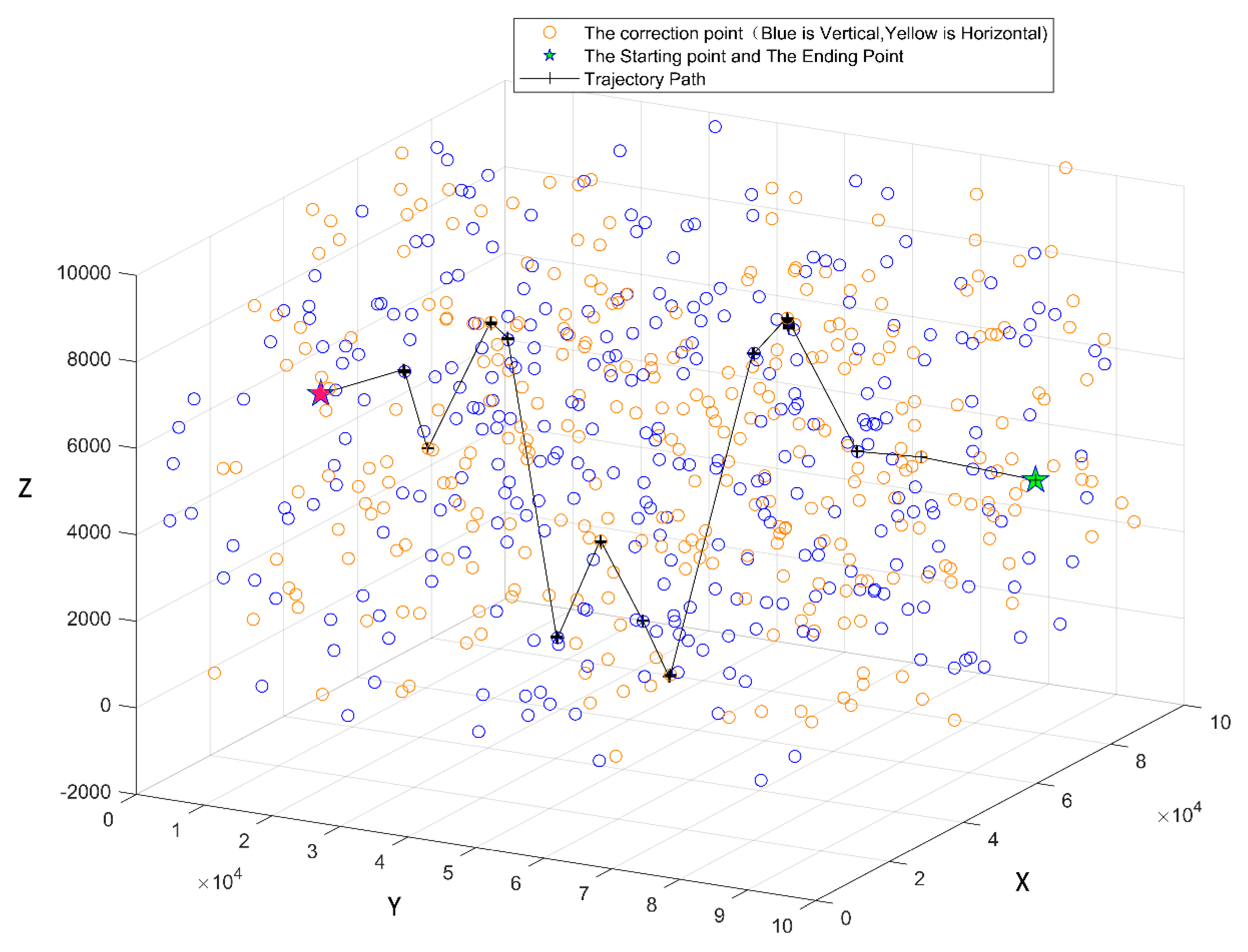
4.3. Simulation Results and Analysis of the Trajectory Planning Algorithm for the Problem 2
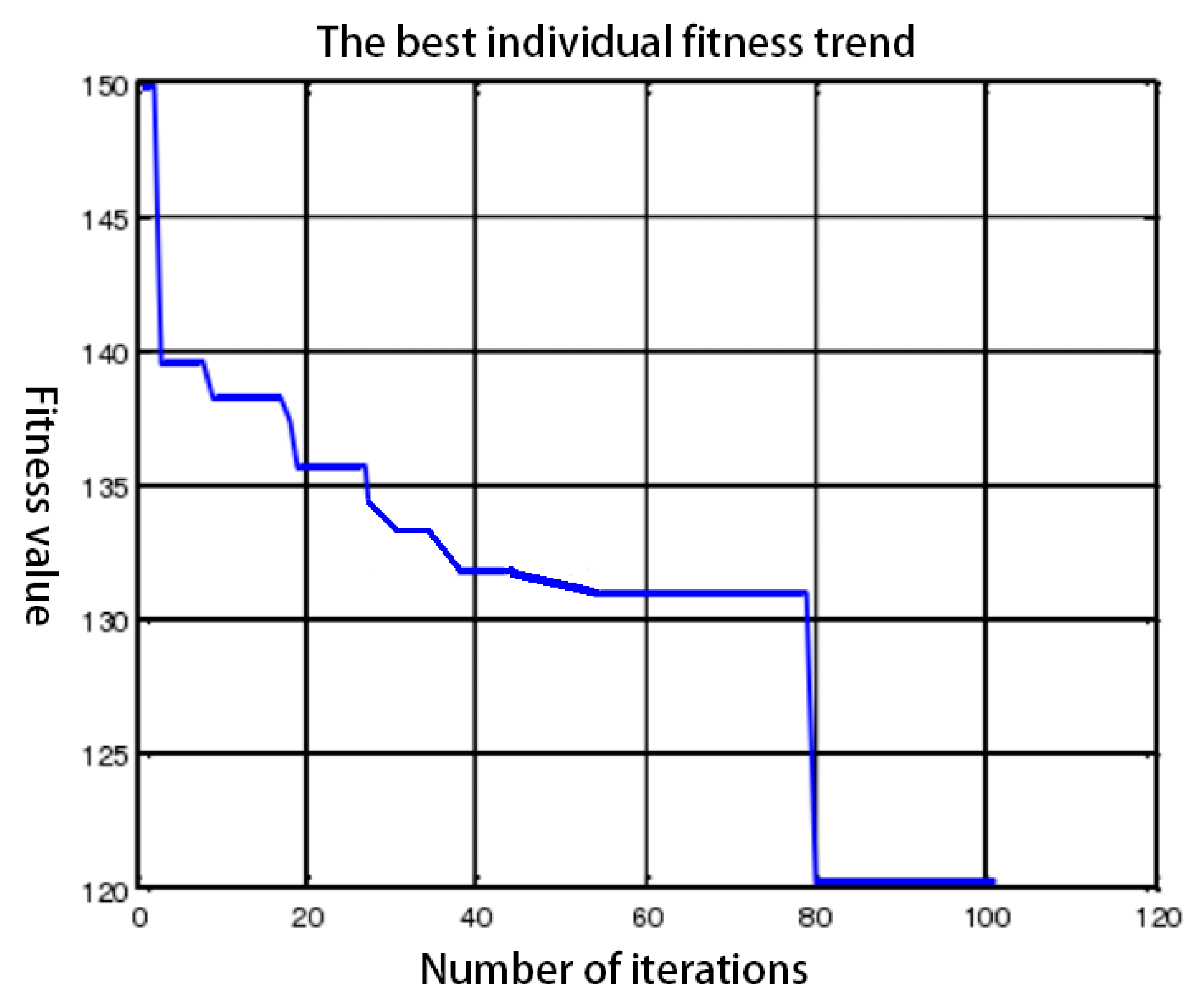
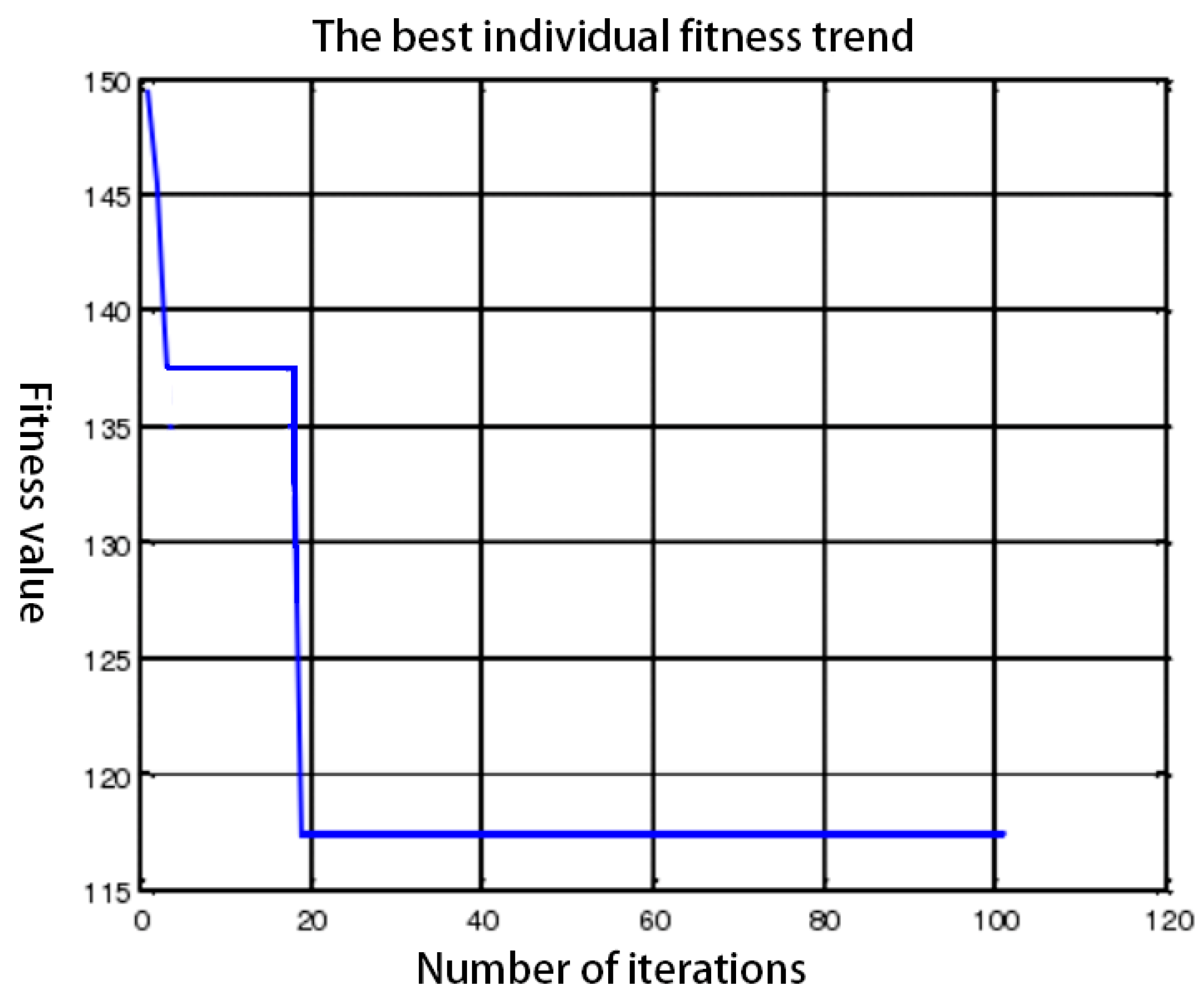
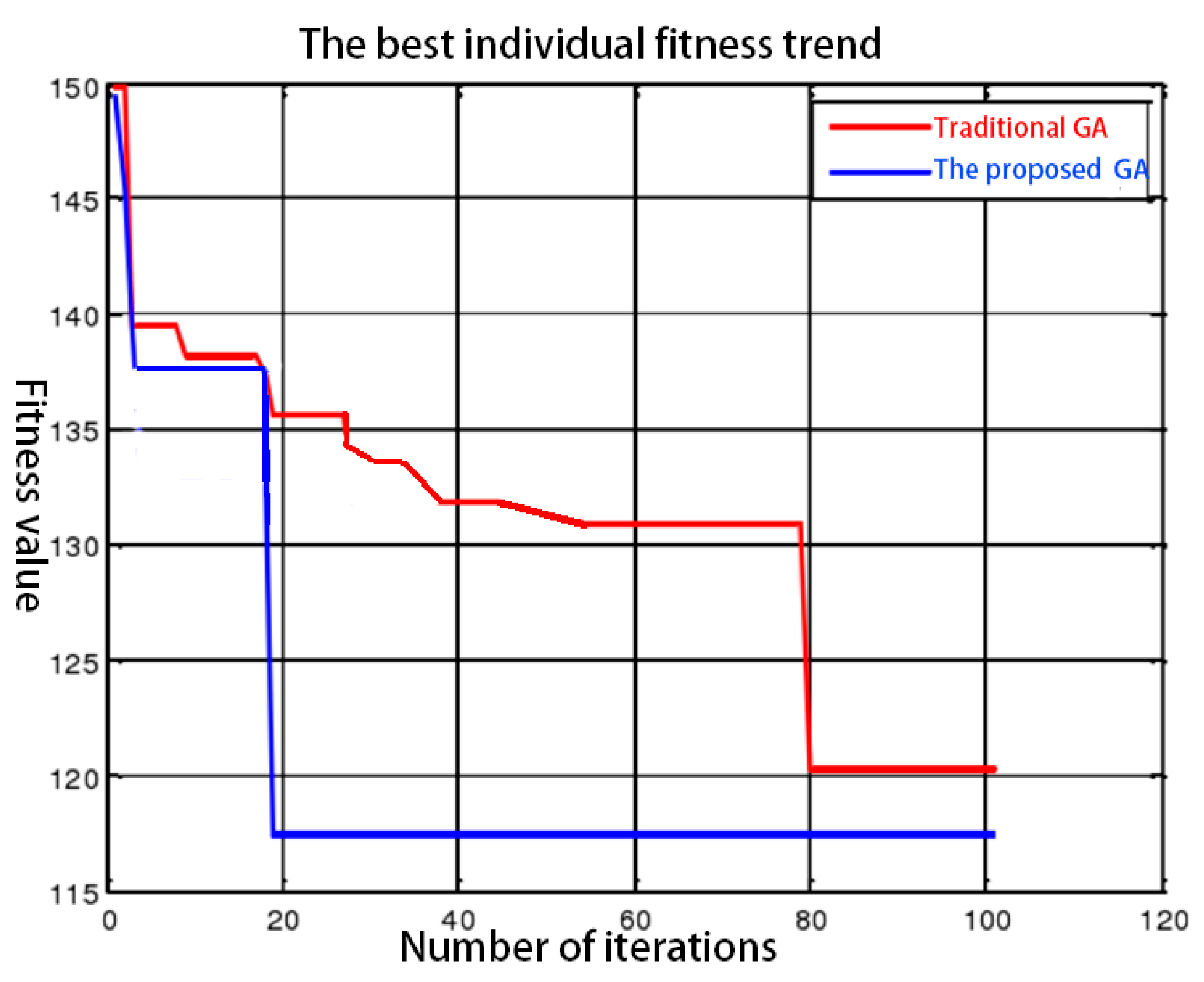
5. Performance Comparison of the Proposed Algorithm with Traditional Swarm Intelligence Algorithm
5.1. For the Problem 1
5.2. For the Problem 2
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhao, S.Y.; Hu, Z.Y.; Chen, B.M.; Lee, T.H. A Robust Real-Time Vision System for Autonomous Cargo Transfer by an Unmanned Helicopter. IEEE Trans. Ind. Electron. 2015, 62, 1210–1218. [Google Scholar] [CrossRef]
- Shen, Y.F.; Rahman, Z.; Krusienski, D.; Li, J. A vision-based automatic safe landing-site detection system. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 294–311. [Google Scholar] [CrossRef]
- Huh, S.; Cho, S.; Jung, Y.; Shim, D.H. Vision-based sense-and-avoid framework for unmanned aerial vehicles. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 3427–3439. [Google Scholar] [CrossRef]
- ElMikaty, M.; Stathaki, T. Car Detection in Aerial Images of Dense Urban Areas. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 51–63. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, D.; Huang, B.; Xie, L. Distributed Filtering-Based Autonomous Navigation System of UAV. Unmanned Syst. 2015, 3, 17–34. [Google Scholar] [CrossRef]
- Carrillo, L.R.G.; Fantoni, I.; Rondon, E.; Dzul, A. Three-dimensional position and velocity regulation of a quad-rotorcraft using optical flow. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 358–371. [Google Scholar] [CrossRef] [Green Version]
- Kaiser, M.K.; Gans, N.R.; Dixon, W.E. Vision-Based Estimation for Guidance, Navigation, and Control of an Aerial Vehicle. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1064–1077. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–99. [Google Scholar] [CrossRef]
- Chazelle, B.; Edelsbrunner, H. An improved algorithm for constructing kth-order Voronoi diagrams. IEEE Trans. Comput. 1987, 100, 1349–1354. [Google Scholar] [CrossRef]
- Li, Q.Q.; Zhe, Z. A Voronoi-based hierarchical graph model of road network for route planning. In Proceedings of the 11th Conference Intelligent Transportation Systems, Beijing, China, 12–15 October 2008; pp. 599–604. [Google Scholar]
- Sugihara, K. Approximation of generalized Voronoi diagrams by ordinary Voronoi diagrams. Cvgip Graph. Models Image Process. 1993, 55, 522–531. [Google Scholar] [CrossRef]
- Meng, B.B.; Gao, X.G. UAV Path Planning Based on Bidirectional Sparse A* Search Algorithm. In Proceedings of the 2010 International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 11–12 May 2010. [Google Scholar]
- Szczerba, R.J.; Galkowski, P.; Glicktein, I.S.; Ternullo, N. Robust algorithm for real-time route planning. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 869–878. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Chen, X.M.; Zhang, J. The Dynamic Path Planning of UAV Based on A* Algorithm. Appl. Mech. Mater. 2014, 494–495, 1094–1097. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, H.; Yao, H. Research on autonomous planning method based on improved quantum Particle Swarm Optimization for Autonomous Underwater Vehicle. In Proceedings of the OCEANS 2016 MTS/IEEE, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Zhang, H.; Liu, Z. 3D path planning for micro air vehicles based on quantum-behaved particle swarm optimization algorithm. J. Cent. South Univ. 2013, 44, 58–62. [Google Scholar]
- Tokgo, M.; Li, R. Estimation Method for Path Planning Parameter Based on a Modified QPSO Algorithm. In Proceedings of the International Conference on Artificial Intelligence: Methodology, Systems, and Applications, Varna, Bulgaria, 11–13 September 2014. [Google Scholar]
- Shorakaei, H.; Vahdani, M.; Imani, B.; Gholami, A. Optimal cooperative path planning of unmanned aerial vehicles by a parallel genetic algorithm. Robotica 2016, 34, 823–836. [Google Scholar] [CrossRef]
- Men, J.Z.; Qun, E.; Yao, K.M. Study on the Route Planning for Anti-Submarine Ship-Based UAV Based on Genetic Algorithm. Adv. Mater. Res. 2012, 433–440, 4823–4826. [Google Scholar] [CrossRef]
- Zhang, D.Q.; Zhao, J.F.; Lei, G.; Wang, S.H.; Zheng, X.L. Hurry Path Planning Based on Adaptive Genetic Algorithm. Appl. Mech. Mater. 2014, 446–447, 1292–1297. [Google Scholar] [CrossRef]
- Shiri, H.; Park, J.; Bennis, M. Massive Autonomous UAV Path Planning: A Neural Network Based Mean-Field Game Theoretic Approach; Cornell University: Ithaca, NY, USA, 2019. [Google Scholar]
- Hao, Z.; Cao, C.; Xu, L.; Gulliver, T.A. AN UAV Detection Algorithm Based on an Artificial Neural Network. IEEE Access 2018, 6, 24720–24728. [Google Scholar]
- Chen, Y.B.; Luo, G.C.; Mei, Y.S.; Yu, J.Q.; Su, X.L. UAV path planning using artificial potential field method updated by optimal control theory. Int. J. Syst. Sci. 2016, 47, 1407–1420. [Google Scholar] [CrossRef]
- Xia, C.; Jing, Z. The Three-Dimension Path Planning of UAV Based on Improved Artificial Potential Field in Dynamic Environment. In Proceedings of the International Conference on Intelligent Human-Machine Systems & Cybernetics, Hangzhou, China, 26–27 August 2013. [Google Scholar]
- Liu, J.Y.; Guo, Z.Q.; Liu, S.Y. The Simulation of an UAV Collision Avoidance Based on the Artificial Potential Field Method. Adv. Mater. Res. 2012, 591–593, 1400–1404. [Google Scholar] [CrossRef]
- Meng, H.; Xin, G. UAV route planning based on the genetic simulated annealing algorithm. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Xi’an, China, 4–7 August 2010; pp. 788–793. [Google Scholar]
- China Ministry of Education Degree and Graduate Education Development Center. Available online: https://cpipc.chinadegrees.cn/ (accessed on 19 September 2019).
- Kwasniewski, K.K.; Gosiewski, Z. Genetic Algorithm for Mobile Robot Route Planning with Obstacle Avoidance. Acta Mech. Autom. 2018, 12, 151–159. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Number of the Correction Points | X-Coordinate | Y-Coordinate | Z-Coordinate | The Type of the Correction Points |
|---|---|---|---|---|
| 0 | 0.00 | 50,000.00 | 5000.00 | The Starting Point |
| 1 | 33,070.83 | 2789.48 | 5163.52 | 0 |
| 2 | 54,832.89 | 49,179.22 | 1448.30 | 1 |
| 3 | 77,991.55 | 63,982.18 | 5945.82 | 0 |
| 4 | 16,937.18 | 84,714.34 | 5360.29 | 0 |
| 5 | 339.69 | 14,264.46 | 3857.85 | 1 |
| 6 | 3941.93 | 74,279.86 | 9702.92 | 1 |
| 7 | 45,474.01 | 26,849.48 | 6411.72 | 1 |
| 8 | 86,806.90 | 5351.31 | 4409.85 | 0 |
| 9 | 23,602.88 | 68,460.10 | 88.47 | 0 |
| …… | …… | …… | …… | …… |
| 610 | 14,870.60 | 95,939.17 | 8248.84 | 0 |
| 611 | 93,009.57 | 4549.33 | 7882.61 | 1 |
| 612 | 100,000.00 | 59,652.34 | 5022.00 | The Ending Point |
| The Number of the Correction Points | The Type of the Correction Points |
|---|---|
| 0 | The Starting Point |
| 504 | 1 |
| 295 | 0 |
| 124 | 1 |
| 76 | 0 |
| 34 | 1 |
| 12 | 0 |
| 404 | 1 |
| 595 | 0 |
| 398 | 1 |
| 612 | The Ending Point |
| The Number of the Correction Points | The Type of the Correction Points |
|---|---|
| 0 | The Starting Point |
| 346 | 1 |
| 200 | 0 |
| 294 | 0 |
| 136 | 1 |
| 108 | 1 |
| 74 | 0 |
| 462 | 1 |
| 543 | 0 |
| 369 | 1 |
| 457 | 0 |
| 388 | 1 |
| 436 | 0 |
| 612 | The Ending Point |
| Number | q1 | q2 | q3 |
|---|---|---|---|
| 1 | 0.3 | 0.2 | 0.5 |
| 2 | 0.3 | 0.5 | 0.2 |
| Number | Algorithm | Number of Correction Points Passed | Trajectory Length |
|---|---|---|---|
| 1 | Before improvement | 31 | 35,436.632176 |
| After improvement | 12 | 14,957.842315 | |
| 2 | Before improvement | 39 | 41,258.581392 |
| After improvement | 15 | 19,513.452647 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Xiong, H.-L.; Liu, Y.; Tan, N.-D.; Chen, L. Trajectory Planning Algorithm of UAV Based on System Positioning Accuracy Constraints. Electronics 2020, 9, 250. https://doi.org/10.3390/electronics9020250
Zhou H, Xiong H-L, Liu Y, Tan N-D, Chen L. Trajectory Planning Algorithm of UAV Based on System Positioning Accuracy Constraints. Electronics. 2020; 9(2):250. https://doi.org/10.3390/electronics9020250
Chicago/Turabian StyleZhou, Hao, Hai-Ling Xiong, Yun Liu, Nong-Die Tan, and Lei Chen. 2020. "Trajectory Planning Algorithm of UAV Based on System Positioning Accuracy Constraints" Electronics 9, no. 2: 250. https://doi.org/10.3390/electronics9020250
APA StyleZhou, H., Xiong, H. -L., Liu, Y., Tan, N. -D., & Chen, L. (2020). Trajectory Planning Algorithm of UAV Based on System Positioning Accuracy Constraints. Electronics, 9(2), 250. https://doi.org/10.3390/electronics9020250