1. Introduction
Two-dimensional (2D) direction-of-arrival (DOA) estimation has attracted much attention recently for its wide applications in the fields of radar, sonar, communications and navigation, etc. Conventional research mainly focuses on the uniform rectangular arrays (URAs) [
1,
2], whose inter-element spacing between the adjacent sensors is no more than the typical half-wavelength
. Although the URAs are easy to construct, the detection ability is limited by the number of sensors. The increasing sensor number brings higher hardware cost and computational complexity. Thus, it is significant to design arrays with sparse geometries and the ability to detect more sources than physical sensors.
In the past five years, numbers of novel one-dimensional (1D) sparse arrays with the concept of a coarray have been proposed to achieve a higher number of degrees-of-freedom (DOFs) than ULA. One of the most discussed sparse array configurations, named the nested array [
3], is proposed to resolve
sources with
N sensors. The nested array has closed-form expressions of sensor locations and the DOFs. To further enhance the DOFs or to reduce the mutual coupling effects, a series of improved nested array configurations are proposed, such as the extended nested array [
4], the augmented nested array [
5], and the super nested arrays [
6,
7]. Another attractive sparse array configuration, named the coprime array [
8,
9], can resolve
sources with
physical sensors, where
are a pair of coprime integer numbers. In order to extend the DOFs or to solve the high peak side lobe problems of the coprime array, various optimized geometries are proposed recently, such as the generalized coprime arrays [
10], extended coprime arrays [
11,
12], and the multi-period coprime structures [
13]. With these sparse array configurations, one can construct the difference coarray by applying the concept of the Khatri–Rao (KR) product to sparse arrays [
3,
4,
5,
8,
9,
10,
11,
12,
13]. Finally, under-determined DOA estimation methods, such as the spatial smoothing based MUSIC (SS-MUSIC) method [
3,
14], can be applied to the resulting difference coarray to detect more sources.
Inspired by the 1D linear sparse arrays introduced above, many planar sparse array configurations have been proposed for 2D virtual aperture enhancement. The L-shaped arrays [
15,
16,
17] have successfully overcome the ambiguity problem by comparing the results of the sparse subarrays and using fast spectral search methods. However, the number of detectable sources is not significantly increased. In order to obtain a hole-free virtual URA with higher DOFs, several geometries based on the difference coarray are proposed, such as the billboard arrays [
18] and open-box arrays (OBA) [
19]. Although the OBA geometry can effectively achieve high virtual DOFs, the mutual coupling effects brought by the dense sensor distribution on the boundaries can not be ignored. In order to reduce the mutual coupling effects, a series of improved array structures, for instance the partially open box arrays (POBA), half open box arrays (HOBA), half open box arrays with two layers (HOBA-2), and hourglass arrays [
20,
21] are proposed one after another. Among the optimized OBAs, the recently proposed half H array (HHA) and ladder array (LA) [
22] can achieve the lowest DOA estimation error. On the other hand, a new class of 2D arrays with sensors on the lattice, named 2D nested arrays [
23,
24], is proposed, which can generate a hole-free difference coarray with much higher virtual DOFs. Besides, the concept of a coprime array is also extended to 2D cases due to the capability of reducing the mutual coupling effects and enhancing the resolution. Recently, a coprime planar array geometry consists of two square uniform planar subarrays [
25] is utilized in conventional MUSIC algorithm for 2D DOA estimation. Although the spectral search method provides excellent DOA estimation performance, the computational complexity remains high in two dimensions. A generalized coprime planar array with two rectangular uniform subarrays [
26] and the corresponding fast 2D DOA estimation approach [
27] are proposed to reduce the complexity significantly. However, the above 2D coprime geometries only make use of the physical sensors to estimate DOAs and the superiority of coarray is not considered. To obtain dense coarrays with high virtual DOFs from sparse arrays, the theory of sparse coprime sensing in multiple dimensions [
28,
29] is proposed to provide basic configurations and applications of the coprime arrays on lattice. However, conventional array configurations are designed mainly based on the concept of difference coarray. In fact, the sum coarray can be utilized jointly with the difference coarray to further increase DOFs.
In this paper, we improve the vectorized conjugate augmented MUSIC (VCAM) algorithm [
30,
31] and apply it to 2D DOA estimation based on the second-order statistics. Firstly, we utilize both the spatial information and the temporal information to construct a conjugate augmented correlation vector. By vectorizing the covariance matrix of this vector, we can obtain a difference and sum (diff-sum) coarray, which make use of the complementary between the difference coarray and the sum coarray to construct a larger hole-free area. Based on the diff-sum coarray concept, we then propose two novel 2D coprime configurations. For the first configuration, the inter-element spacing of one subarray is compressed by a positive integer, which results in an array configuration named the coprime array with a compressed subarray (CAACS). The CAACS can acquire much higher DOFs than the prototype 2D coprime array as some of the holes in coarray can be filled up. For the second configuration named as coprime array with two separated subarrays (CATSS), sensors of the two subarrays are rearranged to be bilaterally symmetrical and a proper separation is introduced between the two subarrays. As a result, the diff-sum coarray is redistributed to constitute a central hole-free URA with significantly large number of contiguous virtual sensors. Simulations verify the effectiveness of our proposed methods on increasing the DOFs and improving the DOA estimation performance.
The rest of this paper is organized as follows. In
Section 2, the 2D data model and the concept of difference coarray are overviewed. Then, the structure of prototype planar coprime array is introduced. In
Section 3, the 2D VCAM algorithm is proposed to generate the diff-sum coarray. Two 2D coprime configurations, i.e., CAACS and CATSS, are introduced in
Section 4 and
Section 5. Simulations provided in
Section 6 compare the DOA estimation performance of our proposed array configurations with other conventional 2D arrays based on the proposed 2D VCAM algorithm. The results demonstrate the validity of the proposed configurations.
Section 7 concludes the paper.
Notations: We use lower-case (upper-case) bold characters to denote vectors (matrices), and double-line characters to denote sets. implies the transpose, whereas and denotes complex conjugation and complex conjugate transpose of a matrix or vector, respectively. denotes the vectorization operator that turns a matrix into a vector. denotes a diagonal matrix with the elements of as the diagonal elements, whereas denotes the determinant of a matrix . ⊗ implies the Kronecker product and ⊙ implies the KR product. We use × between two value ranges to denote the 2D value range, and after a value range to denote that the ranges are the same in two dimensions.
4. Coprime Array with a Compressed Subarray
As illustrated in
Figure 2, there are many “holes” in the difference coarray of PPCA. To remedy these holes, we propose two novel array configurations to improve increase the consecutive aperture. The first configuration named coprime array with a compressed subarray (CAACS) is presented in this section, whereas the second configuration named coprime array with two separated subarrays (CATSS) is provided in
Section 5.
Based on the PPCA geometry, we suppose two subarrays with
and
sensors respectively, where
and
are coprime. Besides, we require either
or
not to be a prime number. Similar with the CACIS configuration [
10], we introduce a positive integer compression factor
p to change the inter-element spacing of one subarray. We assume that
can be treated as the product of
p and another positive integer
, i.e.,
where
. It is obvious that
is also coprime with
since
and
share no common factors other than unity.
Figure 3 shows an example of the concept of CAACS configuration, where
. It can be seen that, in this array configuration, subarray
still has
elements with interval of
, whereas subarray
has
elements with interval
. As a result, the coprime array in this configuration can be considered that the sensor interval of one subarray of the original coprime array is compressed by an integer factor of
p, which leads to the proposed CAACS.
In this configuration, the self-difference set of the two subarrays becomes
where
and
. The forward cross-difference set between the two subarrays becomes
where
and
.
denotes the base matrix generated by
.
According to the definition of the sum coarray, the entire set of sensor positions
can be represented as
where
and
denote the positive and the negative self-sum coarrays, whereas
and
denote the positive and the negative cross-sum coarrays.
The positive self-sum coarray has virtual sensors located at
where
and
. In addition, the positive cross-sum coarray has virtual sensors located at
where
and
.
and
have sensors located at the mirrored positions of
and
, respectively.
Meanwhile, the corresponding diff-sum coarray can be represented as
The properties of the difference coarray and the sum coarray are summarized respectively in the following propositions.
Proposition 1. The following facts hold for the difference coarray of CAACS:
(a) There are different 2D integers in the set and respectively.
(b) contains a URA area that consists of all the consecutive 2D integers in the set . contains a URA located at the mirrored positions.
(c) The self-difference in the first and third quadrants and that on the X and Y axis form a subset of the cross-difference.
(d) There are “holes” in the range of located at , where are integers.
The proof of Proposition 1 is provided in
Appendix A.
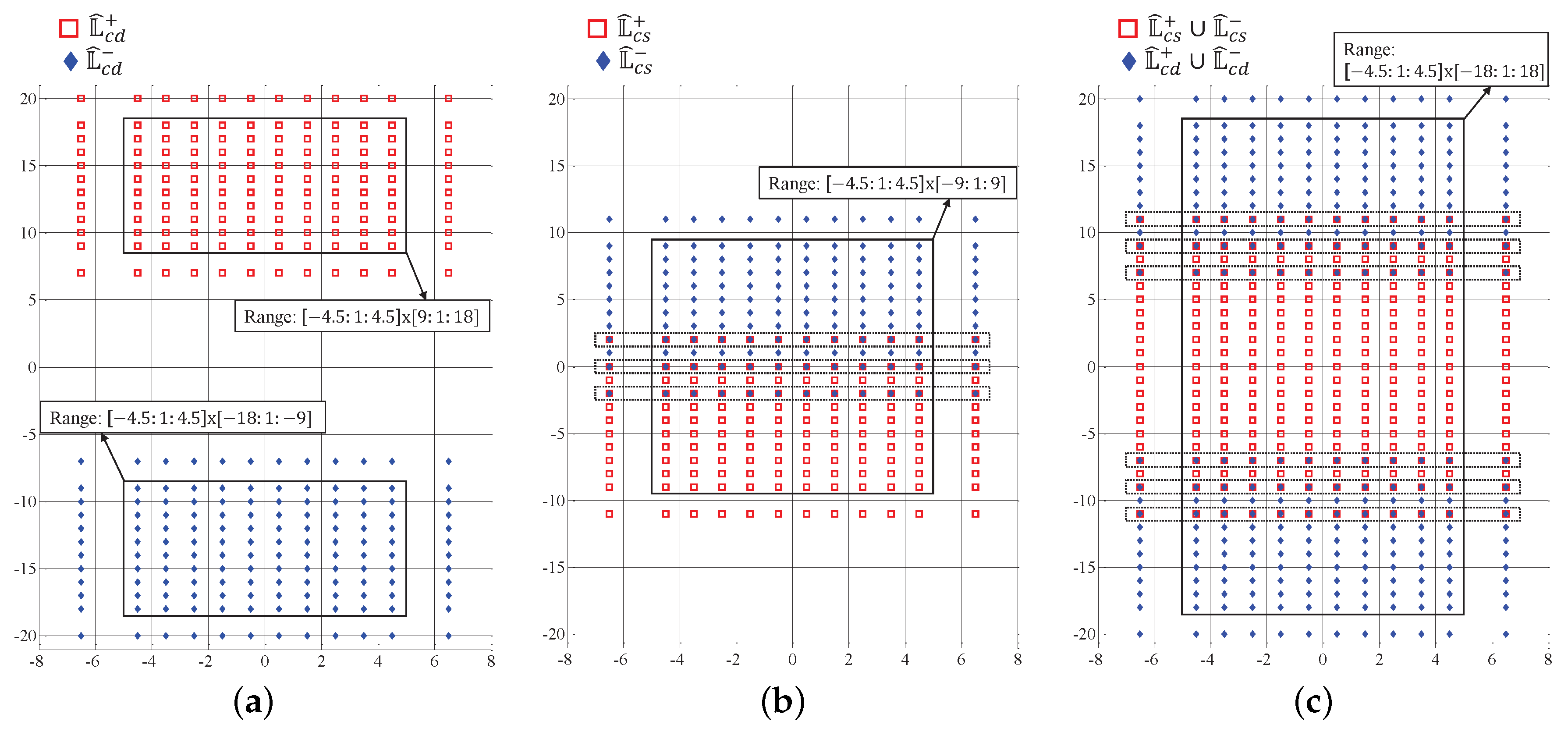
Figure 4a shows an example of the difference coarray of CAACS with
. In this case, the forward cross-difference set consists of 144 unique 2D integers, among which 100 integers in
are consecutive. The backward cross-difference set have the same number of unique 2D integers with consecutive ones in the range
. The two URAs of the cross-difference coarray are marked by solid rectangles. Compared with
Figure 2, the uDOFs increase from 81 to 100. We can make use of these enlarged hole-free virtual URAs to execute DOA estimation and get better performance.
As for the sum coarray of CAACS, it turns out to be:
Proposition 2. The following facts hold for the sum coarray of CAACS:
(a) There are different 2D integers in set and set . and have only one overlapped point, i.e., the origin (0, 0).
(b) contains a URA area that consists of all the consecutive 2D integers in set . contains a URA located at the mirrored positions.
(c) The positive self-sum coarray contains all the elements of the physical array, .
(d) There are “holes” in the range of located at , where are integers.
The proof of Proposition 2 is provided in
Appendix B.
Figure 4b shows an example of the sum coarray of CAACS with
. There are 144 unique virtual sensors in the positive cross-sum coarray and 100 of them are consecutive, ranging in
. The negative cross-sum coarray is symmetric with the positive cross-sum coarray about the origin.
We can draw a conclusion from the above two propositions that for specific coprime integers
and
, smaller values of
(or in other words, larger values of
p) result in a larger URA area, which also means higher uDOFs in the coarray. The maximum value that
p can take is
, and the
Sensor Configuration I of the 2D nested array structure in [
23] is the special case of the CAACS configuration.
Remark 1. It can be seen that the self-diff coarray and self-sum coarray make little contribution to increasing the range of the URA area. As mentioned in the previous section, we intend to utilize the contiguous sensors to execute subspace-based DOA estimation, and we only take the cross-coarrays into account in the rest of this paper. Figure 4c illustrates the cross-diff-sum coarray of the CAACS configuration. The cross-diff coarray and the cross-sum coarray have the same construction, in particular, the same size of consecutive areas. Although the URAs in the cross-sum coarray fail to complement the URAs in the cross-diff coarray as we expected, the distribution of the diff-sum coarray of CAACS inspires us with another novel array configuration to utilize those DOFs, which is introduced in detail in Section 5. Note that in the simulation of CAACS, we use the URA in to conduct DOA estimation. 5. Coprime Array with Two Separated Subarrays
In
Section 4 we have found that all the cross-coarrays of CAACS contain hole-free URAs. It is obvious that the diff-sum coarray of CAACS can increase the DOFs and the antenna aperture significantly in comparison with PPCA. However, as we can see in
Figure 4c, the cross-coarrays distribute diagonally with only part of their sensors overlapped. Although the total number of consecutive virtual sensors increases, we still fail to make full use of the diff-sum coarray. Note that the four coarrays have the same geometry, which inspires us to rearrange them properly so that an even larger virtual URA can be acquired. This leads to the following array configuration named coprime array with two separated subarrays (CATSS).
Based on the configuration of CAACS, the following steps can further optimize the array geometry. First, all the sensors in
are moved vertically by
to make
and
be on
opposite sides of the
axis as illustrated in
Figure 5a. Next, move the sensors of
horizontally in the positive direction until the entire physical array is bilaterally symmetrical, as demonstrated in
Figure 5b. We rebuild the plane coordinate system as follows: (1) let the line where the lower edge of
falls in be the
axis; (2) let the symmetry axis of
and
be the
axis; (3) so that the cross point of them is the new origin
O. From now on, we use
to denote coarrays of CATSS.
Figure 6 shows an example of the resulting cross coarrays of CATSS. It can be seen that the four cross coarrays are moved to the center of the coordinate plane and are aligned with the same horizontal distribution.
and
locate at the opposite side of the
axis. The range of the virtual URA in
is demonstrated in
Figure 6a. Besides, the virtual URAs in
and
overlap around the
axis and form a new consecutive area, as shown in
Figure 6b. Consequently, the resulting cross-diff-sum coarray contains a central URA which is joined by all four cross coarrays, as illustrated in
Figure 6c. The new central URA has 230 contiguous virtual sensors located at
, which is a significant enhancement comparing with the CAACS configuration in
Figure 4.
Despite the fact that the cross coarrays have already been joined together to construct a central URA, there is still a large number of overlapped virtual sensors in the URA area. The overlapped areas between
and
are marked by dashed rectangles in
Figure 6b, while the overlapped areas between the cross-difference coarray and the cross-sum coarray are also marked in
Figure 6c. By introducing a proper integer separation
l between the two subarrays, the overlap can be reduced so that the DOFs of the resulting cross-diff-sum coarray can be further increased. Specifically, keep
unchanged, while
is shifted along the
axis by
l in the negative direction. Note that
must be held to keep the central URA consecutive.
Figure 5c shows this operation and
Figure 7 illustrates the corresponding cross coarrays with
,
,
and the separation
. As shown in
Figure 7a, it is clear that the cross-difference coarray has no overlap between
and
. Meanwhile, the overlap between
and
has been reduced to only three lines as illustrated in
Figure 7b. It can be readily verified that the resulting cross-diff-sum coarray in
Figure 7c contains more unique virtual sensors and a much larger central URA in comparison with the cross-diff-sum coarray in
Figure 6c. Note that the overlap between cross-difference coarray and cross-sum coarray has been reduced to only six lines.
In the CATSS configuration and under the new coordinate system, sensors of the two subarrays are located at
where
,
and
.
Thus, the self-difference set of the two subarrays is
where
,
The forward cross-difference set between the two subarrays becomes
where
and
.
denotes the mirrored backward cross-diff set. Moreover, the positive self-sum set and the positive cross-sum set are changed into
and
where
,
,
, and
.
is the mirrored negative self-sum set and
is the mirrored cross-sum set.
We also summarize the properties of the difference coarray and the sum coarray of CATSS in the following proposition.
Proposition 3. The following facts hold for CATSS:
(a) There are different elements in set and respectively.
(b) When , , and have a sole overlapped row on the horizontal axis, whereas when they are completely apart.
(c) contains all the consecutive 2D integers in setwhile contains all the consecutive 2D integers in set (d) When either or is even, ; when both and are odd, is partly overlapped with .
(e) The holes in the range of are located atwhile the holes in the range of are located atwhere and are integers. The proof of Proposition 3 is provided in
Appendix C. Proposition 3c shows that sensors in all the cross coarrays have the same distribution in the horizontal direction. Proposition 3d and its proof illustrates that sensors in the self coarrays are sparsely distributed in both
x and
y coordinates. Besides, they either fall only 0.5
d apart from the cross sensors, or are partly overlapped in the consecutive range. This infers that the self coarrays make no contribution to increase the uDOFs. From Proposition 3e we can deduce that the adjacent cross coarrays can complement their holes with each other. The above facts guarantee that the diff-sum coarray of CATSS contains a hole-free central URA formed by all cross coarrays.
Figure 7 provides a direct example of Proposition 3. All four cross coarrays have virtual sensors consecutive in the range
. Meanwhile,
and
are completely apart while
and
are continuous with only three lines of overlap. Moreover, it can be find that the lower bound of the
y range in
Figure 7b is the upper bound of the
y range of
in
Figure 7a. This fact means that the URAs in cross-diff coarray and cross-sum coarray can be joined together without any holes.
Figure 7c shows the resulting cross-diff-sum coarray, which contains a significantly large central URA with 370 virtual sensors consecutive in
.
Note that the sensor positions in the vertical direction and the final range of the central URA are relevant to the value of the separation l, which leads to the following proposition:
Proposition 4. The CATSS configuration yields a virtual diff-sum coarray such that:
(a) Holes below can be complemented by , while holes upon can be complemented by .
(b) When integer separation l takes value in the range , and form a hole-free URA whose range increases as l grows. When l grows to , a “broken rows” of holes appears at axis between and .
(c) When l takes a proper value in the range of (b), the cross-diff-sum coarray contains all the consecutive 2D integers in the range The proof of Proposition 3 is provided in
Appendix D. Proposition 3a denotes that the difference coarray and its adjacent sum coarray of CATSS always keep their complementarity so that their consecutive areas can always be joined together. In general, the overlap between two sum coarrays decreases as the separation
l increases, which also means that the final range of the central URA increases. However, when
l exceeds a certain bound, the adjacent sum coarrays would lose their complementarity, and a row of holes would appear between
and
.
Figure 8 gives an example of the property (b) of the above proposition. Compared with
Figure 7b, a row of holes appears between
and
when
, since the upper bound of
l is 7 in this example.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}