Brain-Switches for Asynchronous Brain–Computer Interfaces: A Systematic Review


Abstract
:1. Introduction
2. Methods
2.1. Procedure for Selecting Target Papers
2.2. Categories of Selected Papers
2.3. Description of BCI-Related Terminologies Used in This Review
3. Results
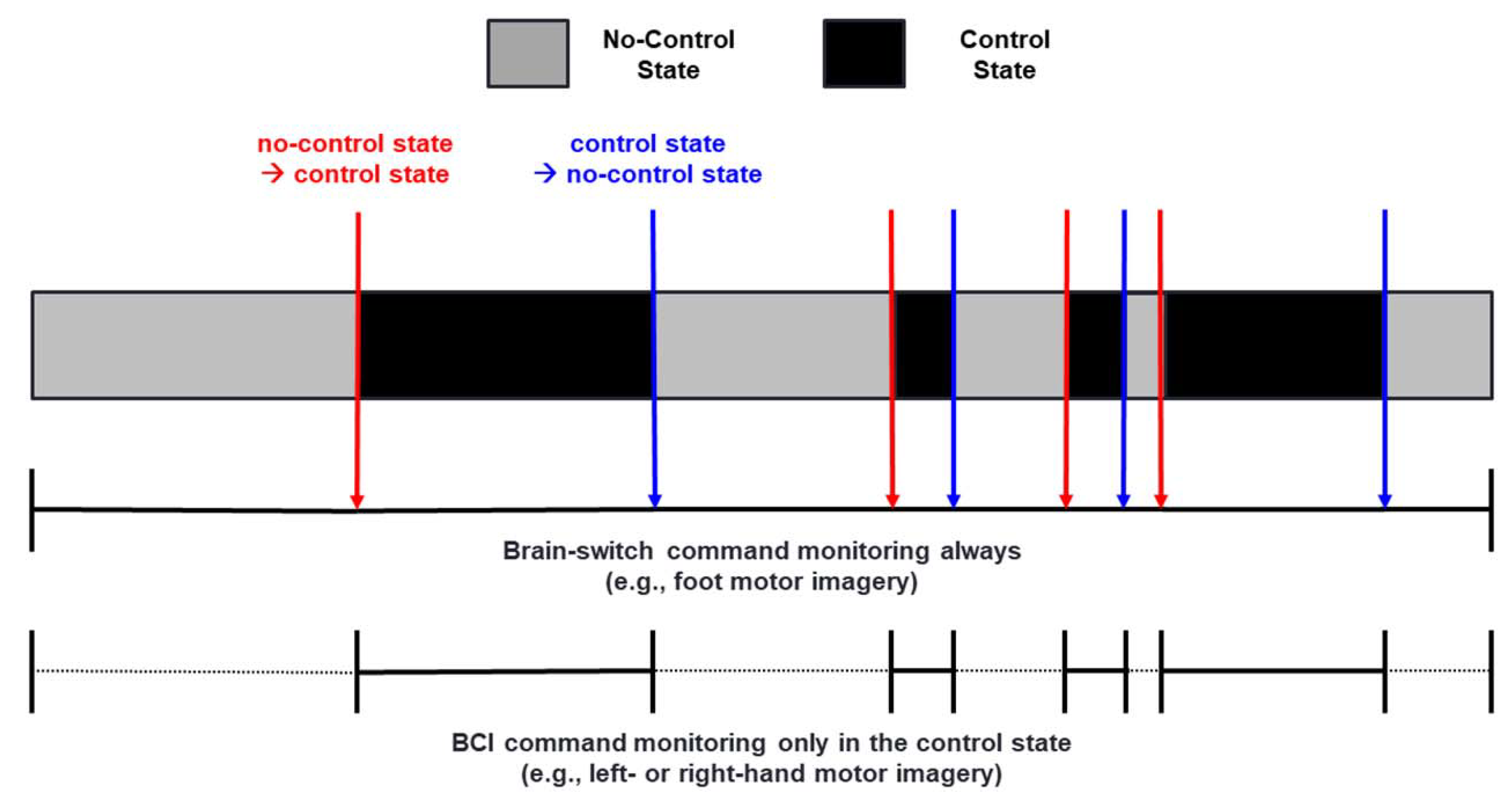
3.1. Operational Principle of a Brain-Switch
3.2. Experimental Paradigms to Evaluate the Performance of Brain-Switches
3.3. Detection Algorithms Used in Brain-Switches
3.4. Taxonomy of Brain-Switches
3.5. EEG-Based Brain-Switches
3.5.1. Endogenous Brain-Switches
3.5.2. Exogenous Brain-Switches
3.5.3. Hybrid Brain-Switches
3.6. NIRS-Based Brain-Switches
3.7. ECoG-Based Brain-Switches
4. Discussions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BCI | Brain–computer interface |
| LIS | Locked-in syndrome |
| EEG | Electroencephalography |
| MEG | Magnetoencephalography |
| fNIRS | functional near-infrared spectroscopy |
| fMRI | functional magnetic-resonance imaging |
| ECoG | Electrocorticography |
| ITR | Information transfer rate |
| TPR | True positive rate |
| FPR | False positive rate |
| ERP | Event-related potential |
| SSVEP | Steady-state visual evoked potential |
| SMR | Sensorimotor rhythm |
| ME | Motor execution |
| MI | Motor imagery |
| RG | Riemannian geometry |
| CSP | Common spatial pattern |
| MRCP | Motor-related cortical potential |
| ERD | Event-related desynchronization |
| ERS | Event-related synchronization |
| LF-ASD | Low frequency asynchronous switch design |
| PSD | Power spectrum density |
| CCA | Canonical correlation analysis |
| SVM | Support vector machine |
References
- Kübler, A.; Kotchoubey, B.; Kaiser, J.; Wolpaw, J.R.; Birbaumer, N. Brain–computer communication: Unlocking the locked in. Psychol. Bull. 2001, 127, 358. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; Heetderks, W.J.; McFarland, D.J.; Peckham, P.H.; Schalk, G.; Donchin, E.; Quatrano, L.A.; Robinson, C.J.; Vaughan, T.M. Brain-computer interface technology: A review of the first international meeting. IEEE Trans. Rehabil. Eng. 2000, 8, 164–173. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Dornhege, G.; Millan, J.d.R.; Hinterberger, T.; McFarland, D.J.; Müller, K.-R. Toward Brain-Computer Interfacing; MIT press: Cambridge, MA, USA, 2007. [Google Scholar]
- Wolpaw, J.; Wolpaw, E.W. Brain-Computer Interfaces: Principles and Practice; OUP USA: Oxford, UK, 2012. [Google Scholar]
- Brunner, C.; Birbaumer, N.; Blankertz, B.; Guger, C.; Kübler, A.; Mattia, D.; Millán, J.d.R.; Miralles, F.; Nijholt, A.; Opisso, E. BNCI Horizon 2020: Towards a roadmap for the BCI community. Brain-Comput. Interfaces 2015, 2, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Hwang, H.-J.; Lim, J.-H.; Jung, Y.-J.; Choi, H.; Lee, S.W.; Im, C.-H. Development of an SSVEP-based BCI spelling system adopting a QWERTY-style LED keyboard. J. Neurosci. Methods 2012, 208, 59–65. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.H.; Kim, Y.W.; Lee, J.H.; An, K.O.; Hwang, H.J.; Cha, H.S.; Han, C.H.; Im, C.H. An emergency call system for patients in locked-in state using an SSVEP-based brain switch. Psychophysiology 2017, 54, 1632–1643. [Google Scholar] [CrossRef]
- Han, C.-H.; Kim, Y.-W.; Kim, S.H.; Nenadic, Z.; Im, C.-H. Electroencephalography-based endogenous brain–computer interface for online communication with a completely locked-in patient. J. Neuroeng. Rehabil. 2019, 16, 18. [Google Scholar] [CrossRef]
- Blankertz, B.; Tomioka, R.; Lemm, S.; Kawanabe, M.; Muller, K.-R. Optimizing spatial filters for robust EEG single-trial analysis. IEEE Signal Process. Mag. 2007, 25, 41–56. [Google Scholar] [CrossRef]
- Blankertz, B.; Acqualagna, L.; Dähne, S.; Haufe, S.; Schultze-Kraft, M.; Sturm, I.; Ušćumlic, M.; Wenzel, M.A.; Curio, G.; Müller, K.-R. The Berlin brain-computer interface: Progress beyond communication and control. Front. Neurosci. 2016, 10, 530. [Google Scholar] [CrossRef] [Green Version]
- Blankertz, B.; Lemm, S.; Treder, M.; Haufe, S.; Müller, K.-R. Single-trial analysis and classification of ERP components—a tutorial. NeuroImage 2011, 56, 814–825. [Google Scholar] [CrossRef]
- Lin, P.T.; Sharma, K.; Holroyd, T.; Battapady, H.; Fei, D.-Y.; Bai, O. A high performance MEG based BCI using single trial detection of human movement intention. In Functional Brain Mapping and the Endeavor to Understand the Working Brain; IntechOpen: London, UK, 2013. [Google Scholar]
- Hwang, H.-J.; Lim, J.-H.; Kim, D.-W.; Im, C.-H. Evaluation of various mental task combinations for near-infrared spectroscopy-based brain-computer interfaces. J. Biomed. Opt. 2014, 19, 077005. [Google Scholar] [CrossRef] [PubMed]
- Shin, J.; Müller, K.-R.; Hwang, H.-J. Near-infrared spectroscopy (NIRS)-based eyes-closed brain-computer interface (BCI) using prefrontal cortex activation due to mental arithmetic. Sci. Rep. 2016, 6, 36203. [Google Scholar] [CrossRef]
- Weiskopf, N.; Mathiak, K.; Bock, S.W.; Scharnowski, F.; Veit, R.; Grodd, W.; Goebel, R.; Birbaumer, N. Principles of a brain-computer interface (BCI) based on real-time functional magnetic resonance imaging (fMRI). IEEE Trans. Biomed. Eng. 2004, 51, 966–970. [Google Scholar] [CrossRef]
- Williams, J.J.; Rouse, A.G.; Thongpang, S.; Williams, J.C.; Moran, D.W. Differentiating closed-loop cortical intention from rest: Building an asynchronous electrocorticographic BCI. J. Neural Eng. 2013, 10, 046001. [Google Scholar] [CrossRef] [PubMed]
- Benabid, A.L.; Costecalde, T.; Eliseyev, A.; Charvet, G.; Verney, A.; Karakas, S.; Foerster, M.; Lambert, A.; Morinière, B.; Abroug, N. An exoskeleton controlled by an epidural wireless brain–machine interface in a tetraplegic patient: A proof-of-concept demonstration. Lancet Neurol. 2019, 18, 1112–1122. [Google Scholar] [CrossRef]
- Lakshmi, M.R.; Prasad, T.; Prakash, D.V.C. Survey on EEG signal processing methods. Int. J. Adv. Research Comput. Sci. Softw. Eng. 2014, 4, 84–91. [Google Scholar]
- Han, C.-H.; Lim, J.-H.; Lee, J.-H.; Kim, K.; Im, C.-H. Data-driven user feedback: An improved neurofeedback strategy considering the interindividual variability of EEG features. BioMed Res. Int. 2016, 2016, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Fazli, S.; Mehnert, J.; Steinbrink, J.; Curio, G.; Villringer, A.; Müller, K.-R.; Blankertz, B. Enhanced performance by a hybrid NIRS–EEG brain computer interface. Neuroimage 2012, 59, 519–529. [Google Scholar] [CrossRef]
- Fazli, S.; Dähne, S.; Samek, W.; Bießmann, F.; Mueller, K.-R. Learning from more than one data source: Data fusion techniques for sensorimotor rhythm-based brain–computer interfaces. Proc. IEEE 2015, 103, 891–906. [Google Scholar] [CrossRef]
- Millán, J.d.R.; Rupp, R.; Müller-Putz, G.; Murray-Smith, R.; Giugliemma, C.; Tangermann, M.; Vidaurre, C.; Cincotti, F.; Kubler, A.; Leeb, R. Combining brain–computer interfaces and assistive technologies: state-of-the-art and challenges. Front. Neurosci. 2010, 4, 161. [Google Scholar] [CrossRef]
- Hwang, H.-J.; Kim, S.; Choi, S.; Im, C.-H. EEG-based brain-computer interfaces: A thorough literature survey. Int. J. Hum.-Comput. Interact. 2013, 29, 814–826. [Google Scholar] [CrossRef]
- Salvaris, M.; Sepulveda, F. Visual modifications on the P300 speller BCI paradigm. J. Neural Eng. 2009, 6, 046011. [Google Scholar] [CrossRef] [PubMed]
- Yin, E.; Zhou, Z.; Jiang, J.; Chen, F.; Liu, Y.; Hu, D. A novel hybrid BCI speller based on the incorporation of SSVEP into the P300 paradigm. J. Neural Eng. 2013, 10, 026012. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.-H.; Lee, J.-H.; Hwang, H.-J.; Kim, D.H.; Im, C.-H. Development of a hybrid mental spelling system combining SSVEP-based brain–computer interface and webcam-based eye tracking. Biomed. Signal Process. Control 2015, 21, 99–104. [Google Scholar] [CrossRef]
- Birbaumer, N.; Ghanayim, N.; Hinterberger, T.; Iversen, I.; Kotchoubey, B.; Kübler, A.; Perelmouter, J.; Taub, E.; Flor, H. A spelling device for the paralysed. Nature 1999, 398, 297. [Google Scholar] [CrossRef] [PubMed]
- Ortner, R.; Allison, B.Z.; Korisek, G.; Gaggl, H.; Pfurtscheller, G. An SSVEP BCI to control a hand orthosis for persons with tetraplegia. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 19, 1–5. [Google Scholar] [CrossRef]
- Inoue, S.; Akiyama, Y.; Izumi, Y.; Nishijima, S. The development of BCI using alpha waves for controlling the robot arm. IEICE Trans. Commun. 2008, 91, 2125–2132. [Google Scholar] [CrossRef]
- McFarland, D.J.; Wolpaw, J.R. Brain-computer interface operation of robotic and prosthetic devices. Computer 2008, 41, 52–56. [Google Scholar] [CrossRef]
- Gandhi, V.; Prasad, G.; Coyle, D.; Behera, L.; McGinnity, T.M. EEG-based mobile robot control through an adaptive brain–robot interface. IEEE Trans. Syst. Man Cybern. Syst. 2014, 44, 1278–1285. [Google Scholar] [CrossRef]
- He, S.; Zhang, R.; Wang, Q.; Chen, Y.; Yang, T.; Feng, Z.; Zhang, Y.; Shao, M.; Li, Y. A P300-based threshold-free brain switch and its application in wheelchair control. IEEE Trans. Neural Syst. Rehabilitation Eng. 2016, 25, 715–725. [Google Scholar] [CrossRef]
- Huang, D.; Qian, K.; Fei, D.-Y.; Jia, W.; Chen, X.; Bai, O. Electroencephalography (EEG)-based brain–computer interface (BCI): A 2-D virtual wheelchair control based on event-related desynchronization/synchronization and state control. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 379–388. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Pan, J.; Wang, F.; Yu, Z. A hybrid BCI system combining P300 and SSVEP and its application to wheelchair control. IEEE Trans. Biomed. Eng. 2013, 60, 3156–3166. [Google Scholar] [PubMed]
- Tsui, C.S.L.; Gan, J.Q.; Hu, H. A self-paced motor imagery based brain-computer interface for robotic wheelchair control. Clin. EEG Neurosci. 2011, 42, 225–229. [Google Scholar] [CrossRef] [PubMed]
- Choi, K.; Cichocki, A. Control of a wheelchair by motor imagery in real time. In Proceedings of the International conference on intelligent data engineering and automated learning, Daejeon, Korea, 2–5 November 2018; pp. 330–337. [Google Scholar]
- Rebsamen, B.; Guan, C.; Zhang, H.; Wang, C.; Teo, C.; Ang, M.H.; Burdet, E. A brain controlled wheelchair to navigate in familiar environments. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 590–598. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Long, J.; Yu, T.; Yu, Z.; Wang, C.; Zhang, H.; Guan, C. An EEG-based BCI system for 2-D cursor control by combining Mu/Beta rhythm and P300 potential. IEEE Trans. Biomed. Eng. 2010, 57, 2495–2505. [Google Scholar] [CrossRef] [PubMed]
- Xia, B.; An, D.; Chen, C.; Xie, H.; Li, J. A mental switch-based asynchronous brain-computer interface for 2D cursor control. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 3101–3104. [Google Scholar] [CrossRef]
- Lin, C.-T.; Lin, F.-C.; Chen, S.-A.; Lu, S.-W.; Chen, T.-C.; Ko, L.-W. EEG-based brain-computer interface for smart living environmental auto-adjustment. J. Med. Biol. Eng. 2010, 30, 237–245. [Google Scholar] [CrossRef]
- Wang, Y.-T.; Wang, Y.; Jung, T.-P. A cell-phone-based brain–computer interface for communication in daily life. J. Neural Eng. 2011, 8, 025018. [Google Scholar] [CrossRef]
- Coyle, D.; Garcia, J.; Satti, A.R.; McGinnity, T.M. EEG-based continuous control of a game using a 3 channel motor imagery BCI: BCI game. In Proceedings of the 2011 IEEE Symposium on Computational Intelligence, Cognitive Algorithms, Mind, and Brain (CCMB), Paris, France, 11–15 April 2011; pp. 1–7. [Google Scholar]
- Yoh, M.-S.; Kwon, J.; Kim, S. NeuroWander: A BCI game in the form of interactive fairy tale. In Proceedings of the 12th ACM international conference adjunct papers on Ubiquitous computing-Adjunct, Copenhagen, Denmark, 26–29 September 2019; pp. 389–390. [Google Scholar]
- Tangermann, M.W.; Krauledat, M.; Grzeska, K.; Sagebaum, M.; Vidaurre, C.; Blankertz, B.; Müller, K.-R. Playing pinball with non-invasive BCI. In Proceedings of the 21st International Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 8–11 December 2008; pp. 1641–1648. [Google Scholar]
- Diez, P.F.; Mut, V.A.; Perona, E.M.A.; Leber, E.L. Asynchronous BCI control using high-frequency SSVEP. J. Neuroeng. Rehabil. 2011, 8, 39. [Google Scholar] [CrossRef] [Green Version]
- Lim, J.-H.; Hwang, H.-J.; Han, C.-H.; Jung, K.-Y.; Im, C.-H. Classification of binary intentions for individuals with impaired oculomotor function:‘eyes-closed’SSVEP-based brain–computer interface (BCI). J. Neural Eng. 2013, 10, 026021. [Google Scholar] [CrossRef]
- Xia, B.; Li, X.; Xie, H.; Yang, W.; Li, J.; He, L. Asynchronous brain–computer interface based on steady-state visual-evoked potential. Cogn. Comput. 2013, 5, 243–251. [Google Scholar] [CrossRef]
- Liu, R.; Wang, Y.-X.; Zhang, L. An FDES-based shared control method for asynchronous brain-actuated robot. IEEE Trans. Cybern. 2015, 46, 1452–1462. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Li, Y.; Yan, Y.; Zhang, H.; Wu, S.; Yu, T.; Gu, Z. Control of a wheelchair in an indoor environment based on a brain–computer interface and automated navigation. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 128–139. [Google Scholar] [CrossRef] [PubMed]
- Borisoff, J.F.; Mason, S.G.; Bashashati, A.; Birch, G.E. Brain-computer interface design for asynchronous control applications: Improvements to the LF-ASD asynchronous brain switch. IEEE Trans. Biomed. Eng. 2004, 51, 985–992. [Google Scholar] [CrossRef] [PubMed]
- Blankertz, B.; Dornhege, G.; Schafer, C.; Krepki, R.; Kohlmorgen, J.; Muller, K.-R.; Kunzmann, V.; Losch, F.; Curio, G. Boosting bit rates and error detection for the classification of fast-paced motor commands based on single-trial EEG analysis. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 127–131. [Google Scholar] [CrossRef]
- Huggins, J.E.; Wren, P.A.; Gruis, K.L. What would brain-computer interface users want? Opinions and priorities of potential users with amyotrophic lateral sclerosis. Amyotroph. Lateral Scler. 2011, 12, 318–324. [Google Scholar] [CrossRef]
- Fedorova, A.A.; Shishkin, S.L.; Nuzhdin, Y.O.; Faskhiev, M.N.; Vasilyevskaya, A.M.; Ossadtchi, A.E.; Kaplan, A.Y.; Velichkovsky, B.M. A fast “single-stimulus” brain switch. In Proceedings of the Proc. 6th Int. Brain-Computer Interface Conf., Graz, Austria, 16–19 September 2014. [Google Scholar] [CrossRef]
- Barachant, A.; Bonnet, S.; Congedo, M.; Jutten, C. A Brain-Switch Using Riemannian Geometry; HAL Archive Ouvertes: Lyon, France, 2011; Available online: http://hal.archives-ouvertes.fr/hal-00629110 (accessed on 5 October 2011).
- Ding, S.; Zhang, H.; Li, J.; Li, C.; Sun, L. Study of A Brain-Controlled Switch during Motor Imagery. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 152–157. [Google Scholar]
- Jiang, N.; Mrachacz-Kersting, N.; Xu, R.; Dremstrup, K.; Farina, D. An accurate, versatile, and robust brain switch for neurorehabilitation. In Brain-Computer Interface Research; Springer: Berlin/Heidelberg, Germany, 2014; pp. 47–61. [Google Scholar]
- Müller-Putz, G.R.; Kaiser, V.; Solis-Escalante, T.; Pfurtscheller, G. Fast set-up asynchronous brain-switch based on detection of foot motor imagery in 1-channel EEG. Med Biol. Eng. Comput. 2010, 48, 229–233. [Google Scholar] [CrossRef]
- Pan, J.; Li, Y.; Zhang, R.; Gu, Z.; Li, F. Discrimination between control and idle states in asynchronous SSVEP-based brain switches: A pseudo-key-based approach. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 435–443. [Google Scholar]
- Pfurtscheller, G.; Solis-Escalante, T.; Ortner, R.; Linortner, P.; Muller-Putz, G.R. Self-paced operation of an SSVEP-Based orthosis with and without an imagery-based “brain switch”: A feasibility study towards a hybrid BCI. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 409–414. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Solis-Escalante, T. Could the beta rebound in the EEG be suitable to realize a “brain switch”? Clin. Neurophysiol. 2009, 120, 24–29. [Google Scholar] [CrossRef]
- Nikulin, V.V.; Linkenkaer-Hansen, K.; Nolte, G.; Lemm, S.; Müller, K.R.; Ilmoniemi, R.J.; Curio, G. A novel mechanism for evoked responses in the human brain. Eur. J. Neurosci. 2007, 25, 3146–3154. [Google Scholar] [CrossRef]
- Sagara, K.; Kido, K. Evaluation of a 2-channel NIRS-based optical brain switch for motor disabilities’ communication tools. IEICE Trans. Inf. Syst. 2012, 95, 829–834. [Google Scholar] [CrossRef] [Green Version]
- Tomita, Y.; Vialatte, F.-B.; Dreyfus, G.; Mitsukura, Y.; Bakardjian, H.; Cichocki, A. Bimodal BCI using simultaneously NIRS and EEG. IEEE Trans. Biomed. Eng. 2014, 61, 1274–1284. [Google Scholar] [CrossRef] [PubMed]
- Koo, B.; Lee, H.-G.; Nam, Y.; Kang, H.; Koh, C.S.; Shin, H.-C.; Choi, S. A hybrid NIRS-EEG system for self-paced brain computer interface with online motor imagery. J. Neurosci. Methods 2015, 244, 26–32. [Google Scholar] [CrossRef]
- Bashashati, A.; Ward, R.K.; Birch, G.E. Towards development of a 3-state self-paced brain-computer interface. Comput. Intell. Neurosci. 2007, 2007, 84386. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blankertz, B.; Curio, G.; Müller, K.-R. Classifying single trial EEG: Towards brain computer interfacing. Proceedings of Advances in neural information processing systems, Vancouver, BC, Canada, 3–8 December 2001; pp. 157–164. [Google Scholar]
- Blankertz, B.; Dornhege, G.; Lemm, S.; Krauledat, M.; Curio, G.; Müller, K.-R. The Berlin brain-computer interface: Machine learning based detection of user specific brain states. J. UCS 2006, 12, 581–607. [Google Scholar]
- Scherer, R.; Lee, F.; Schlögl, A.; Leeb, R.; Bischof, H.; Pfurtscheller, G. Towards self-paced (asynchronous) Brain-Computer Communication: Navigation through virtual worlds. IEEE Trans. Biomed. Eng. 2007, 55, 675–682. [Google Scholar] [CrossRef]
- Xu, R.; Jiang, N.; Dosen, S.; Lin, C.; Mrachacz-Kersting, N.; Dremstrup, K.; Farina, D. Endogenous sensory discrimination and selection by a fast brain switch for a high transfer rate brain-computer interface. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 901–910. [Google Scholar] [CrossRef]
- Qian, K.; Nikolov, P.; Huang, D.; Fei, D.-Y.; Chen, X.; Bai, O. A motor imagery-based online interactive brain-controlled switch: Paradigm development and preliminary test. Clin. Neurophysiol. 2010, 121, 1304–1313. [Google Scholar] [CrossRef]
- Marquez-Chin, C.; Marquis, A.; Popovic, M.R. EEG-triggered functional electrical stimulation therapy for restoring upper limb function in chronic stroke with severe hemiplegia. Case Rep. Neurol. Med. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Leeb, R.; Friedman, D.; Müller-Putz, G.R.; Scherer, R.; Slater, M.; Pfurtscheller, G. Self-paced (asynchronous) BCI control of a wheelchair in virtual environments: A case study with a tetraplegic. Comput. Intell. Neurosci. 2007, 2007, 79642. [Google Scholar] [CrossRef] [Green Version]
- Panicker, R.C.; Puthusserypady, S.; Sun, Y. An asynchronous P300 BCI with SSVEP-based control state detection. IEEE Trans. Biomed. Eng. 2011, 58, 1781–1788. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mueller-Putz, G.; Scherer, R.; Pfurtscheller, G.; Neuper, C. Temporal coding of brain patterns for direct limb control in humans. Front. Neurosci. 2010, 4, 34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Solis-Escalante, T.; Müller-Putz, G.; Brunner, C.; Kaiser, V.; Pfurtscheller, G. Analysis of sensorimotor rhythms for the implementation of a brain switch for healthy subjects. Biomed. Signal Process. Control 2010, 5, 15–20. [Google Scholar] [CrossRef]
- Choi, B.; Jo, S. A low-cost EEG system-based hybrid brain-computer interface for humanoid robot navigation and recognition. PLoS ONE 2013, 8, e74583. [Google Scholar] [CrossRef]
- Cao, L.; Li, J.; Ji, H.; Jiang, C. A hybrid brain computer interface system based on the neurophysiological protocol and brain-actuated switch for wheelchair control. J. Neurosci. Methods 2014, 229, 33–43. [Google Scholar] [CrossRef]
- Spyrou, L.; Blokland, Y.; Farquhar, J.; Bruhn, J. Optimal multitrial prediction combination and subject-specific adaptation for minimal training brain switch designs. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 700–709. [Google Scholar] [CrossRef]
- Peng, N.; Zhang, R.; Zeng, H.; Wang, F.; Li, K.; Li, Y.; Zhuang, X. Control of a nursing bed based on a hybrid brain-computer interface. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 1556–1559. [Google Scholar]
- Xu, R.; Jiang, N.; Mrachacz-Kersting, N.; Dremstrup, K.; Farina, D. Factors of influence on the performance of a short-latency non-invasive brain switch: Evidence in healthy individuals and implication for motor function rehabilitation. Front. Neurosci. 2016, 9, 527. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Zhou, Z.; Jiang, J.; Yin, E.; Liu, K.; Wang, J.; Liu, Y.; Hu, D. Toward a Hybrid BCI: Self-Paced Operation of a P300-based Speller by Merging a Motor Imagery-Based “Brain Switch” into a P300 Spelling Approach. Int. J. Hum.–Comput. Interact. 2017, 33, 623–632. [Google Scholar]
- Liu, Y.-H.; Huang, S.; Huang, H.-C.; Peng, W.-H. Novel Motor Imagery-Based Brain Switch for Patients With Amyotrophic Lateral Sclerosis: A Case Study Using Two-Channel Electroencephalography. IEEE Consum. Electron. Mag. 2019, 8, 72–77. [Google Scholar] [CrossRef]
- Bozorgzadeh, Z.; Birch, G.E.; Mason, S.G. The LF-ASD brain computer interface: On-line identification of imagined finger flexions in the spontaneous EEG of able-bodied subjects. In Proceedings of the 2000 IEEE International Conference on Acoustics, Speech, and Signal Processing, Proceedings (Cat. No. 00CH37100), Istanbul, Turkey, 5–9 June 2000; pp. 2385–2388. [Google Scholar]
- Birch, G.E.; Bozorgzadeh, Z.; Mason, S.G. Initial on-line evaluations of the LF-ASD brain-computer interface with able-bodied and spinal-cord subjects using imagined voluntary motor potentials. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 10, 219–224. [Google Scholar] [CrossRef]
- Fatourechi, M.; Bashashati, A.; Ward, R.K.; Birch, G.E. A hybrid genetic algorithm approach for improving the performance of the LF-ASD brain computer interface. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 23 March 2005; Volume 345, pp. v/345–v/348. [Google Scholar]
- Borisoff, J.F.; Mason, S.G.; Birch, G.E. Brain interface research for asynchronous control applications. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 160–164. [Google Scholar] [CrossRef] [PubMed]
- Fatourechi, M.; Ward, R.; Birch, G. A self-paced brain–computer interface system with a low false positive rate. J. Neural Eng. 2007, 5, 9. [Google Scholar] [CrossRef] [PubMed]
- Faradji, F.; Ward, R.K.; Birch, G.E. Plausibility assessment of a 2-state self-paced mental task-based BCI using the no-control performance analysis. J. Neurosci. Methods 2009, 180, 330–339. [Google Scholar] [CrossRef] [PubMed]
- Faradji, F.; Ward, R.K.; Birch, G.E. Toward development of a two-state brain–computer interface based on mental tasks. J. Neural Eng. 2011, 8, 046014. [Google Scholar] [CrossRef] [PubMed]
- Mohammadi, R.; Mahloojifar, A.; Coyle, D. A combination of pre-and postprocessing techniques to enhance self-paced BCIs. Adv. Hum.-Comput. Interact. 2012, 2012, 3. [Google Scholar] [CrossRef] [Green Version]
- Wang, P.T.; King, C.E.; Chui, L.A.; Do, A.H.; Nenadic, Z. Self-paced brain–computer interface control of ambulation in a virtual reality environment. J. Neural Eng. 2012, 9, 056016. [Google Scholar] [CrossRef]
- Faradji, F.; Ward, R.K.; Birch, G.E. A Self-Paced Two-State Mental Task-Based Brain-Computer Interface with Few EEG Channels. In New Frontiers in Brain-Computer Interfaces; IntechOpen: London, UK, 2019. [Google Scholar]
- Müller-Putz, G.R.; Pokorny, C.; Klobassa, D.S.; Horki, P. A single-switch BCI based on passive and imagined movements: Toward restoring communication in minimally conscious patients. Int. J. Neural Syst. 2013, 23, 1250037. [Google Scholar] [CrossRef]
- Xu, R.; Dosen, S.; Jiang, N.; Yao, L.; Farooq, A.; Jochumsen, M.; Mrachacz-Kersting, N.; Dremstrup, K.; Farina, D. Continuous 2-D control via state-machine triggered by endogenous sensory discrimination and a fast brain switch. J. Neural Eng. 2019, 16, 056001. [Google Scholar] [CrossRef]
- Pinegger, A.; Faller, J.; Halder, S.; Wriessnegger, S.C.; Müller-Putz, G.R. Control or non-control state: That is the question! An asynchronous visual P300-based BCI approach. J. Neural Eng. 2015, 12, 014001. [Google Scholar] [CrossRef]
- Yu, Y.; Zhou, Z.; Liu, Y.; Jiang, J.; Yin, E.; Zhang, N.; Wang, Z.; Liu, Y.; Wu, X.; Hu, D. Self-paced operation of a wheelchair based on a hybrid brain-computer interface combining motor imagery and P300 potential. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2516–2526. [Google Scholar] [CrossRef]
- Blokland, Y.; Vlek, R.; Karaman, B.; Özin, F.; Thijssen, D.; Eijsvogels, T.; Colier, W.; Floor-Westerdijk, M.; Bruhn, J.; Farquhar, J. Detection of event-related desynchronization during attempted and imagined movements in tetraplegics for brain switch control. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 3967–3969. [Google Scholar] [CrossRef]
- Yu, Y.; Jiang, J.; Zhou, Z.; Yin, E.; Liu, Y.; Wang, J.; Zhang, N.; Hu, D. A self-paced brain-computer interface speller by combining motor imagery and P300 potential. In Proceedings of the 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), Hangzhou, China, 27–28 August 2016; pp. 160–163. [Google Scholar]
- Yoshino, K.; Kato, T. Vector-based phase classification of initial dips during word listening using near-infrared spectroscopy. Neuroreport 2012, 23, 947–951. [Google Scholar] [CrossRef] [PubMed]
- Hong, K.-S.; Naseer, N. Reduction of delay in detecting initial dips from functional near-infrared spectroscopy signals using vector-based phase analysis. Int. J. Neural Syst. 2016, 26, 1650012. [Google Scholar] [CrossRef] [PubMed]
- Zafar, A.; Hong, K.-S. Detection and classification of three-class initial dips from prefrontal cortex. Biomed. Opt. Express 2017, 8, 367–383. [Google Scholar] [CrossRef]
- Rubehn, B.; Bosman, C.; Oostenveld, R.; Fries, P.; Stieglitz, T. A MEMS-based flexible multichannel ECoG-electrode array. J. Neural Eng. 2009, 6, 036003. [Google Scholar] [CrossRef] [PubMed]
- Tolstosheeva, E.; Gordillo-González, V.; Hertzberg, T.; Kempen, L.; Michels, I.; Kreiter, A.; Lang, W. A novel flex-rigid and soft-release ECoG array. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 2973–2976. [Google Scholar]
- Yamakawa, T.; Yamakawa, T.; Aou, S.; Ishizuka, S.; Suzuki, M.; Fujii, M.; Aoki, T. Subdural electrocorticogram measurement with a minimally-invasive procedure using an SMA-manipulated microelectrode array. Adv. Mater. Res. 2011, 222, 313–317. [Google Scholar] [CrossRef]
- Leuthardt, E.C.; Freudenberg, Z.; Bundy, D.; Roland, J. Microscale recording from human motor cortex: implications for minimally invasive electrocorticographic brain-computer interfaces. Neurosurg. Focus 2009, 27, E10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, D.; Song, H.; Xu, R.; Zhou, W.; Ling, Z.; Hong, B. Toward a minimally invasive brain–computer interface using a single subdural channel: A visual speller study. Neuroimage 2013, 71, 30–41. [Google Scholar] [CrossRef]
- Marchetti, M.; Piccione, F.; Silvoni, S.; Gamberini, L.; Priftis, K. Covert visuospatial attention orienting in a brain-computer interface for amyotrophic lateral sclerosis patients. Neurorehabilit. Neural Repair 2013, 27, 430–438. [Google Scholar] [CrossRef]
- Vialatte, F.-B.; Maurice, M.; Dauwels, J.; Cichocki, A. Steady-state visually evoked potentials: Focus on essential paradigms and future perspectives. Prog. Neurobiol. 2010, 90, 418–438. [Google Scholar] [CrossRef]
- Hwang, H.-J.; Ferreria, V.Y.; Ulrich, D.; Kilic, T.; Chatziliadis, X.; Blankertz, B.; Treder, M. A gaze independent brain-computer interface based on visual stimulation through closed eyelids. Sci. Rep. 2015, 5, 15890. [Google Scholar] [CrossRef]
- Won, D.-O.; Hwang, H.-J.; Kim, D.-M.; Müller, K.-R.; Lee, S.-W. Motion-based rapid serial visual presentation for gaze-independent brain-computer interfaces. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 26, 334–343. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.-W.; Hwang, H.-J.; Lim, J.-H.; Lee, Y.-H.; Jung, K.-Y.; Im, C.-H. Classification of selective attention to auditory stimuli: Toward vision-free brain–computer interfacing. J. Neurosci. Methods 2011, 197, 180–185. [Google Scholar] [CrossRef] [PubMed]
- Brouwer, A.-M.; Van Erp, J.B. A tactile P300 brain-computer interface. Front. Neurosci. 2010, 4, 19. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Deng, L.; Hinton, G.; Kingsbury, B. New types of deep neural network learning for speech recognition and related applications: An overview. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 8599–8603. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Schirrmeister, R.T.; Springenberg, J.T.; Fiederer, L.D.J.; Glasstetter, M.; Eggensperger, K.; Tangermann, M.; Hutter, F.; Burgard, W.; Ball, T. Deep learning with convolutional neural networks for EEG decoding and visualization. Hum. Brain Mapp. 2017, 38, 5391–5420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lawhern, V.J.; Solon, A.J.; Waytowich, N.R.; Gordon, S.M.; Hung, C.P.; Lance, B.J. EEGNet: A compact convolutional neural network for EEG-based brain–computer interfaces. J. Neural Eng. 2018, 15, 056013. [Google Scholar] [CrossRef] [Green Version]
- Sturm, I.; Lapuschkin, S.; Samek, W.; Müller, K.-R. Interpretable deep neural networks for single-trial EEG classification. J. Neurosci. Methods 2016, 274, 141–145. [Google Scholar] [CrossRef] [Green Version]
- Müller-Putz, G.; Leeb, R.; Tangermann, M.; Höhne, J.; Kübler, A.; Cincotti, F.; Mattia, D.; Rupp, R.; Müller, K.-R.; Millán, J.d.R. Towards noninvasive hybrid brain–computer interfaces: Framework, practice, clinical application, and beyond. Proc. IEEE 2015, 103, 926–943. [Google Scholar] [CrossRef]
- Shin, J.; von Lühmann, A.; Blankertz, B.; Kim, D.-W.; Jeong, J.; Hwang, H.-J.; Müller, K.-R. Open access dataset for EEG+ NIRS single-trial classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 25, 1735–1745. [Google Scholar] [CrossRef]
- Shin, J.; Kim, D.-W.; Müller, K.-R.; Hwang, H.-J. Improvement of information transfer rates using a hybrid EEG-NIRS brain-computer interface with a short trial length: Offline and pseudo-online analyses. Sensors 2018, 18, 1827. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Müller, K.-R.; Schmitz, C.H.; Kim, D.-W.; Hwang, H.-J. Evaluation of a compact hybrid brain-computer interface system. BioMed Res. Int. 2017, 2017, 6820482. [Google Scholar] [CrossRef]
- Höhne, J.; Krenzlin, K.; Dähne, S.; Tangermann, M. Natural stimuli improve auditory BCIs with respect to ergonomics and performance. J. Neural Eng. 2012, 9, 045003. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
| Term | Description |
|---|---|
| Motor imagery (MI) | Motor imagery (MI) is defined as imagination of a kinesthetic body movement, such as foot, tongue, left hand, right hand, and so on. |
| Motor execution (ME) | Motor execution (ME) is a voluntary body movement, such as foot, tongue, left hand, right hand, and so on. |
| Slow cortical potential (SCP) | Slow cortical potential (SCP) is brain activity related to motor and cognitive preparation, which lasts for from 300 ms to several seconds. |
| Event-related (de)synchronization (ERD/ERS) | Event-related (de)synchronization (ERD/ERS) is the decrease/increase in frequency power induced by an internally or externally paced event regardless of the event type, and thus ERD/ERS is induced during sensory, cognitive, or motor tasks. In particular, mu and beta ERD/ERS are generally shown around the sensorimotor cortex during MI or ME. |
| Event-related potential (ERP) | Event-related potential (ERP) is a time-locked brain response evoked by specific visual, auditory, and tactile stimuli. |
| Steady-state visual evoked potential (SSVEP) | Steady-state visual evoked potential (SSVEP) is a periodic brain response evoked by repetitive presentation of a visual stimulus, flickering or reversing at a specific frequency. |
| Movement-related cortical potential (MRCP) | Movement-related cortical potential (MRCP) is brain activity observed before and after ME and MI, which has a slow negative potential occurring from about 2 s prior to the onset of ME and MI. |
| Sensorimotor Rhythm (SMR) | Sensorimotor rhythm (SMR) is a specific brain wave over the sensorimotor cortex generated after MI or ME. The frequency of the SMR is in range of 13 to 15 Hz. |
| True positive rate (TPR) | True positive rate (TPR) means the ratio of the number of correctly detected trials to the number of all trials. In TPR, a trial means an intention to turn into the control state from the no-control state. |
| False positive rate (FPR) | False positive rate (FPR) means the ratio of the number of incorrectly detected trials to the number of all trials. In FPR, a trial means no intention to turn into the control state from the no-control state. Two metrics are used to quantify FPR, which are percentage and the number of FPs/minute. The percentage does not have any time information and only shows the rate of incorrectly detected trials while FPs/minute has the time information how long a brain-switch is operated without false positives. |
| Onset detection time (ODT) | Onset detection time (ODT) means the time taken to detect the user’s intention to turn on a control state from a no-control state using a brain-switch. Note that ODT was reported for 8 out of 49 studies using asynchronous paradigms that wait until onset intention was detected. This is because other studies used a fixed time for onset detection (e.g., 5 s), thus it is impossible to estimate when exactly onset intention is detected during the fixed time. |
| Detection Algorithm | Paper # |
|---|---|
| Simple threshold method | [59,63,64,65,71,72,73,74] |
| Classifier-based threshold method | [17,18,35,40,51,52,54,55,58,60,61,66,67,68,69,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95,96,97] |
| Classifier-based template matching method | [8,70] |
| Classifier-based threshold-free method | [33] |
| Paper # | Task | Feature Type | TPR (%) | FPR | ODT | |
|---|---|---|---|---|---|---|
| (%) | (FPs/min) | (s) | ||||
| [51] | Finger ME | ERD/ERS | 81.00 | 2.00 | - | - |
| [84] | Finger MI | ERD/ERS | ≥70.00 | ≤3.00 | - | - |
| [85] | Finger MI | ERD/ERS | ≥70.00 | ≤3.00 | - | - |
| [86] | Finger ME | ERD/ERS | 76.90 | 2.00 | - | - |
| [87] | Finger ME | ERD/ERS | 73.00 | 2.00 | - | - |
| [66] | Foot ME | ERD/ERS | 58.00 | 1.00 | ||
| [69] | Hand, foot, or tongue MI | FBP | 28.40 | 16.90 | ||
| [88] | Finger ME | ERD/ERS | 56.20 | 0.10 | - | - |
| [61] | Foot MI | ERD/ERS | 59.20 | ≤10.00 | - | - |
| [89] | MM, LC, OR, NC | AR | 78.70 | 0.00 | - | - |
| [58] | Foot MI | ERD/ERS | 79.00 | ≤10.00 | - | - |
| [75] | Hand or foot MI | ERD/ERS | 70.20 | 36.00 | - | - |
| [60] | Foot MI | ERD/ERS | - | - | 1.46 | - |
| [71] | Hand MI | ERD/ERS | - | 0.78 | - | 36.90 |
| [76] | Foot MI | ERD/ERS | 46.00 | 14.00 | - | - |
| [90] | MM, LC, OR, NC | AR | 67.26 | 0.00 | ||
| [55] | Hand MI | RG | 91.30 | - | 0.40 | - |
| [91] | Foot ME | FBP | 85.00 | 5.00 | ||
| [94] | Hand or foot MI | ERD/ERS | 58.44 | 27.50 | - | - |
| [40] | Hand or foot MI | CSP | ≥80.00 | - | - | - |
| [79] | Hand ME | ERD/ERS | 64.00 | 33.00 | - | - |
| [70] | Foot MI | MRCP | 72.00 | - | 1.90 | - |
| [81] | Foot MI | MRCP | 70.00 | - | - | - |
| [99] | Hand MI | CSP | 86.46 | - | - | - |
| [83] | Foot MI | Sample entropy | 89.50 | 7.00 | - | - |
| [93] | MM, LC, OR, or hand MI | AR | 54.60 | 0.00 | - | - |
| [97] | Hand MI | CSP | 85.70 | 4.43 | - | 2.05 |
| [52] | Hand ME | ERP | - | - | - | - |
| [72] | Hand ME | ERD/ERS | - | - | - | - |
| [77] | Hand or foot MI | ERD/ERS | - | - | - | - |
| [67] | Hand ME | ERP | - | - | - | - |
| [68] | Hand ME | ERP | - | - | - | - |
| [73] | Foot MI | FBP | - | - | - | - |
| [92] | Foot MI | FBP | - | - | - | - |
| [95] | Foot MI | MRCP | - | - | - | - |
| Paper # | Task | Feature Type | TPR (%) | FPR | ODT | |
|---|---|---|---|---|---|---|
| (%) | (FPs/min) | (s) | ||||
| [59] | SSVEP | PSD | 78.75 | 4.17 | 0.98 | - |
| [54] | ERP | P300 | - | - | 0.10 | ≒4.00 |
| [33] | ERP | P300 | 86.30 | 0.94 | - | - |
| [8] | SSVEP | PSD | 100.00 | 0.38 | 9.90 | |
| [74] | SSVEP | PSD | 96.60 | 0.03 | - | - |
| Paper # | Task | Feature Type | TPR (%) | FPR | ODT | |
|---|---|---|---|---|---|---|
| (%) | (FPs/min) | (s) | ||||
| [35] | SSVEP + ERP | PSD + P300 | - | - | 0.49 | 4.30 |
| [80] | SSVEP + ERP | PSD + P300 | 93.75 | - | 0.15 | 9.31 |
| [96] | SSVEP + ERP | PSD + P300 | 99.00 | - | - | - |
| [78] | SSVEP + MI | CCA + CSP | - | - | - | - |
| Paper # | Task | Feature Type | TPR (%) | FPR | ODT | |
|---|---|---|---|---|---|---|
| (%) | (FPs/min) | (s) | ||||
| [63] | MS | Δ HbO | 83.30 | - | - | 11.50 |
| [64] | SSVEP | 2nd derivatives of Δ HbO and Δ HbR | ≒80.00 | - | - | |
| [65] | Hand MI | Δ HbO | 98.00 | 3.00 | - | 10.36 |
| Paper # | Task | Feature Type | TPR | FPR | ODT | |
|---|---|---|---|---|---|---|
| (%) | (%) | (FPs/min) | (s) | |||
| [17] | Hand ME | ERD/ERS | 100.00 | 0.08 | - | - |
| [18] | Hand MI | ERD/ERS | 92.10 | - | 4.90 | - |
| The Type of Brain-Switches | Number of Studies | TPR | FPR | ODT | |
|---|---|---|---|---|---|
| (%) | (%) | (FPs/min) | (s) | ||
| EEG-based endogenous brain-switches | 35 | 70.03 ± 14.70 (25) | 08.46 ± 11.05 (21) | 1.25 ± 0.77 (3) | 19.48 ± 24.64 (2) |
| EEG-based exogenous brain-switches | 5 | 90.41 ± 9.710 (4) | 1.71 ± 2.18 (3) | 0.49 ± 0.45 (3) | 06.95 ± 4.17 (2) |
| EEG-based hybrid brain-switches | 4 | 96.38 ± 3.710 (2) | - | 0.32 ± 0.24 (2) | 06.81 ± 3.54 (2) |
| NIRS-based endogenous brain-switches | 2 | 90.65 ± 10.39 (2) | 3.00 (1) | - | 10.93 ± 0.81 (2) |
| NIRS-based exogenous Brain-switches | 1 | ≒80.00 (1) | - | - | - |
| ECoG-based endogenous brain-switches | 2 | 96.05 ± 5.59 (2) | 0.08 (1) | 4.90 (1) | - |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, C.-H.; Müller, K.-R.; Hwang, H.-J. Brain-Switches for Asynchronous Brain–Computer Interfaces: A Systematic Review. Electronics 2020, 9, 422. https://doi.org/10.3390/electronics9030422
Han C-H, Müller K-R, Hwang H-J. Brain-Switches for Asynchronous Brain–Computer Interfaces: A Systematic Review. Electronics. 2020; 9(3):422. https://doi.org/10.3390/electronics9030422
Chicago/Turabian StyleHan, Chang-Hee, Klaus-Robert Müller, and Han-Jeong Hwang. 2020. "Brain-Switches for Asynchronous Brain–Computer Interfaces: A Systematic Review" Electronics 9, no. 3: 422. https://doi.org/10.3390/electronics9030422
APA StyleHan, C. -H., Müller, K. -R., & Hwang, H. -J. (2020). Brain-Switches for Asynchronous Brain–Computer Interfaces: A Systematic Review. Electronics, 9(3), 422. https://doi.org/10.3390/electronics9030422