Boosted Trees Algorithm as Reliable Spectrum Sensing Scheme in the Presence of Malicious Users


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
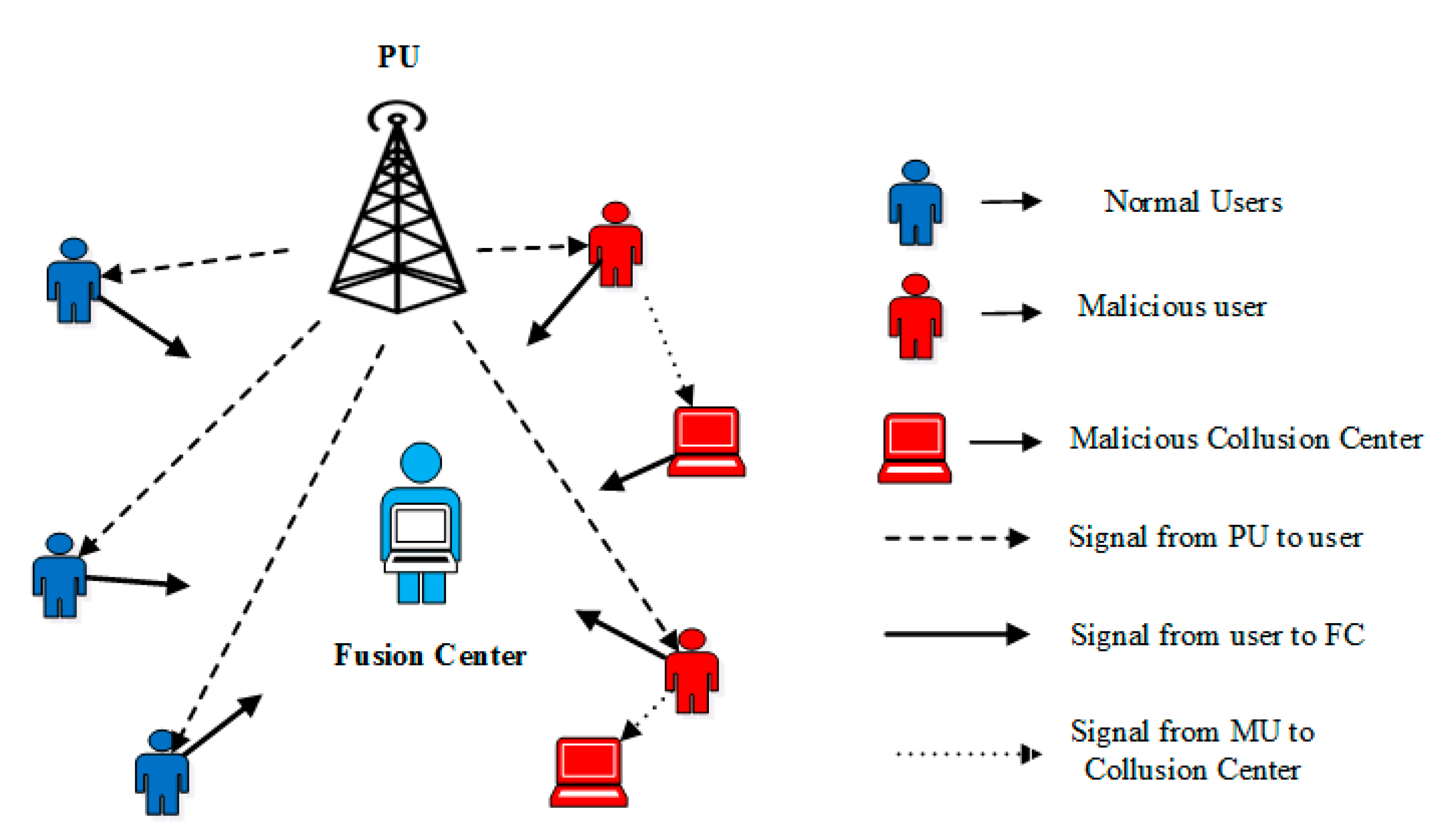
2. System Model
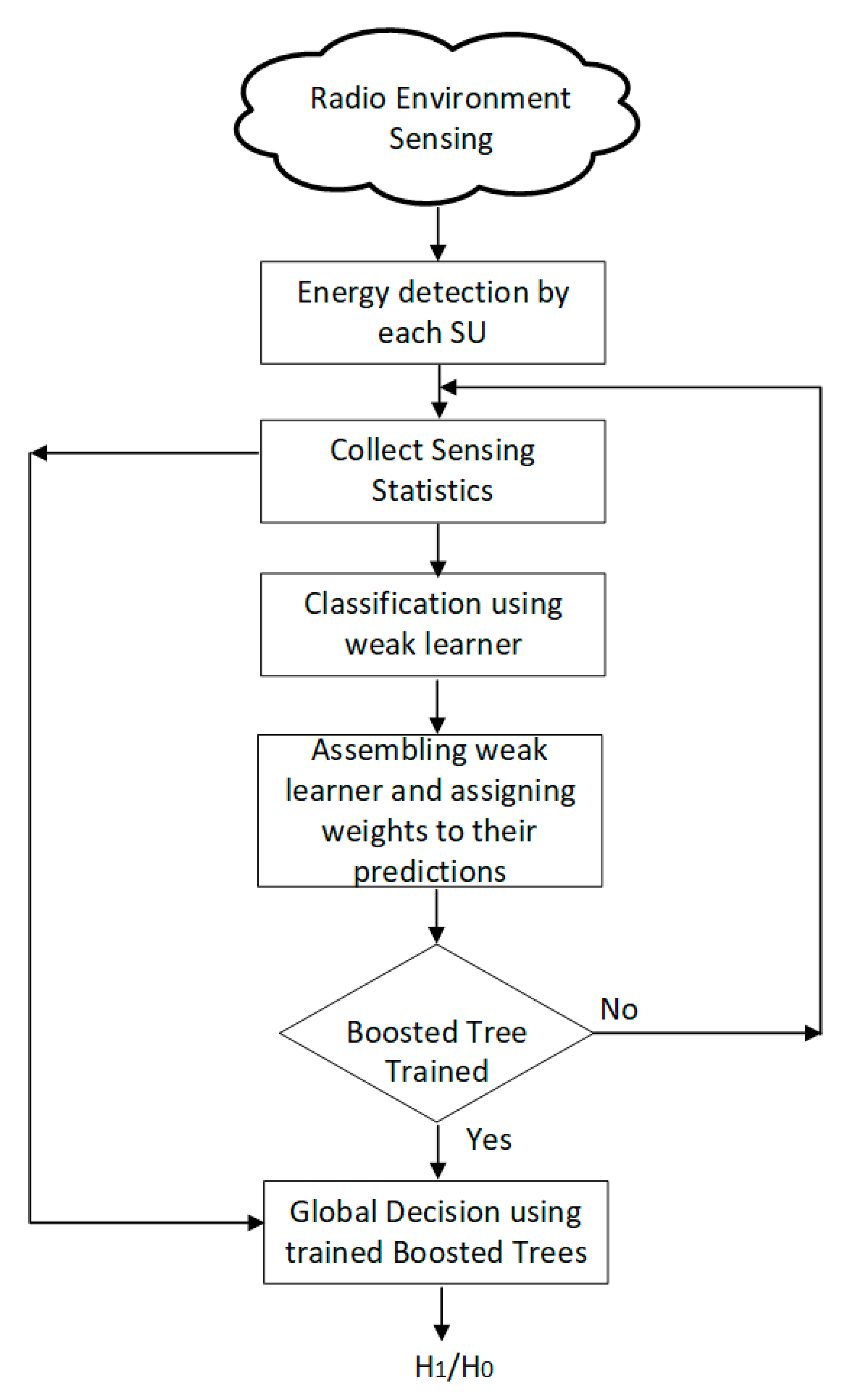
3. Proposed Boosted Trees Algorithm
3.1. Step 1
3.2. Step 2: Training Using Boosted Trees Algorithm
3.3. Step 3
3.3.1. Step 3-1: Global Decision of the Licensed Channel Using Soft Decision Schemes
3.3.2. Step 3-2: Global Decision of the Licensed Channel Using Boosted Tree Algorithm
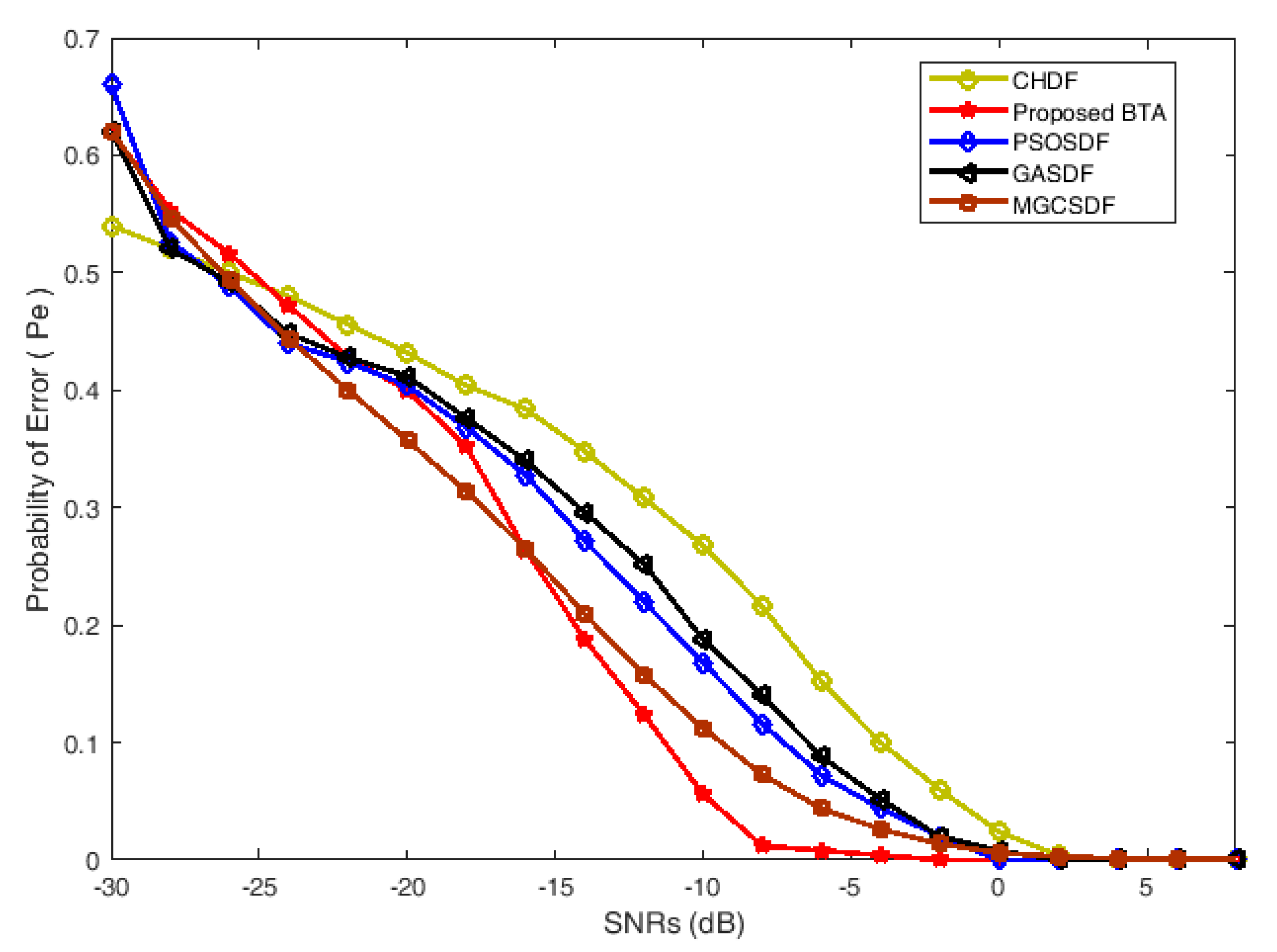
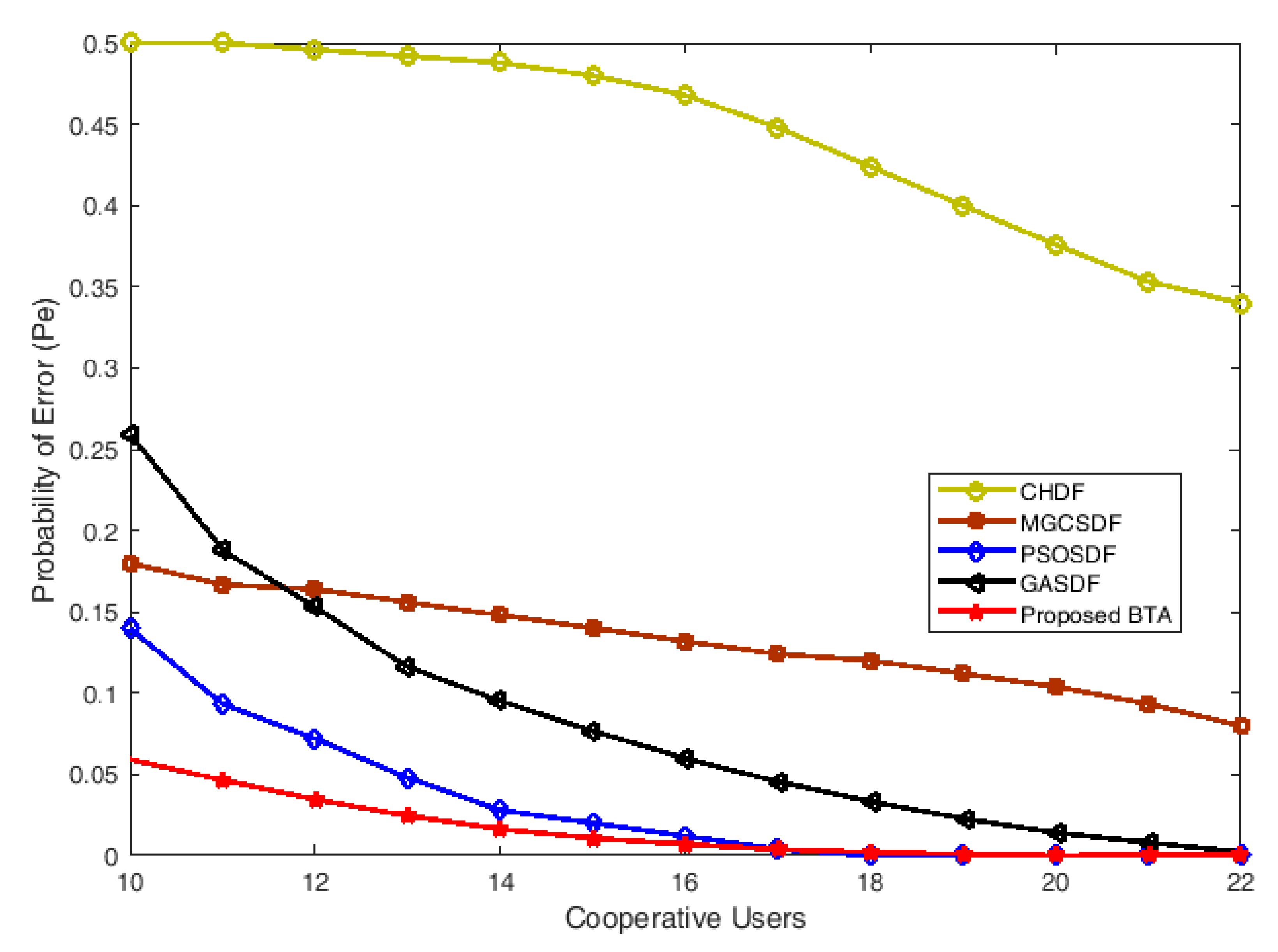
4. Numerical Results
4.1. Case I
4.2. Case II
4.3. Case III
4.4. Case IV
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Ghasemi, A.; Sousa, E.S. Spectrum sensing in cognitive radio networks: Requirements, challenges and design trade-offs. Commun. Mag. IEEE 2008, 46, 32–39. [Google Scholar] [CrossRef]
- Giupponi, L.; Galindo-Serrano, A.; Blasco, P.; Dohler, M. Docitive networks: An emerging paradigm for dynamic spectrum management [dynamic spectrum management]. IEEE Wirel. Commun. 2010, 17, 47–54. [Google Scholar] [CrossRef]
- Awin, F.; Abdel-Raheem, E.; Tepe, K. Blind spectrum sensing approaches for interweaved cognitive radio system: A tutorial and short course. IEEE Commun. Surv. Tutor. 2018, 21, 238–259. [Google Scholar] [CrossRef]
- Awin, F.A.; Alginahi, Y.M.; Abdel-Raheem, E.; Tepe, K. Technical issues on cognitive radio-based internet of things systems: A survey. IEEE Access 2019, 7, 97887–97908. [Google Scholar] [CrossRef]
- Teguig, D.; Scheers, B.; Nir, V.L. Data fusion schemes for cooperative spectrum sensing in cognitive radio networks. In Proceedings of the 2012 Military Communications and Information Systems Conference (MCC), Gdansk, Poland, 8–9 October 2012. [Google Scholar]
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation issues in spectrum sensing for cognitive radios. In Proceedings of the Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004. [Google Scholar] [CrossRef]
- Tandra, R.; Sahai, A. Fundamental limits on detection in low SNR under noise uncertainty. In Proceedings of the 2005 International Conference on Wireless Networks, Communications and Mobile Computing, Maui, HI, USA, 13–16 June 2005; Volume 1, pp. 464–469. [Google Scholar]
- Tian, Z.; Blasch, E.; Li, W.; Chen, G.; Li, X. Performance evaluation of distributed compressed wideband sensing for cognitive radio networks. In Proceedings of the 2018 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008. [Google Scholar]
- Chaudhari, S. Spectrum Sensing for Cognitive Radios: Algorithms, Performance, and Limitations. Ph.D. Thesis, Aalto University, Espoo, Finland, 2012. [Google Scholar]
- Koo, I.; Vu-Van, H. A robust cooperative spectrum sensing based on Kullback-Leibler divergence. IEICE Trans. Commun. 2012, E95–B, 1286–1290. [Google Scholar]
- Sharifi, A.A.; Niya, J.M. Securing collaborative spectrum sensing against malicious attackers in cognitive radio networks. Wirel. Pers. Commun. 2016, 90, 75–91. [Google Scholar] [CrossRef]
- Mehboob, U.; Qadir, J.; Ali, S.; Vasilakos, A. Genetic Algorithms in Wireless Networking: Techniques, Applications, and Issues; Springer: Berlin/Heidelberg, Germany, 2016; Volume 20. [Google Scholar]
- Khan, M.S.; Gul, N.; Kim, J.; Qureshi, I.M.; Kim, S.M. A genetic algorithm-based soft decision fusion scheme in cognitive IoT networks with malicious users. Wirel. Commun. Mob. Comput. 2020, 2020, 2509081. [Google Scholar] [CrossRef] [Green Version]
- Akbari, M.; Ghanbarisabagh, M. A novel evolutionary-based cooperative spectrum sensing mechanism for cognitive radio networks. Wirel. Pers. Commun. 2014, 79, 1017–1030. [Google Scholar] [CrossRef]
- Qin, Z.; Li, Q.; Hsieh, G. Defending against cooperative attacks in cooperative spectrum sensing. IEEE Trans. Wirel. Commun. 2013, 12, 2680–2687. [Google Scholar] [CrossRef] [Green Version]
- Fathy, M.; Tammam, A.; Saafan, A. Influence of relaying malicious node within cooperative sensing in cognitive radio network. Wirel. Netw. 2019, 5, 2449–2458. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, G.; Wu, Q.; Zou, Y.; Han, Z.; Wang, J. Byzantine attack and defense in cognitive radio networks: A survey. IEEE Commun. Surv. Tutor. 2015, 17, 1342–1363. [Google Scholar] [CrossRef] [Green Version]
- Sharifi, A.A.; Sharifi, M.; MuseviNiya, M.J. Collaborative spectrum sensing under primary user emulation attack in cognitive radio networks. IETE J. Res. 2016, 62, 205–211. [Google Scholar] [CrossRef]
- Abrardo, A.; Barni, M.; Kallas, K.; Tondi, B. Decision fusion with unbalanced priors under synchronized byzantine attacks: A message-passing approach. In Proceedings of the 2018 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA ASC), Honolulu, HI, USA, 12–15 November 2018; pp. 1160–1167. [Google Scholar]
- Gupta, N.; Dhurandher, S.K.; Sehgal, A. A contract theory approach-based scheme to encourage secondary users for cooperative sensing in cognitive radio networks. IEEE Syst. J. 2020, 14, 2400–2410. [Google Scholar] [CrossRef]
- Cao, X.; Lai, L. Distributed gradient descent algorithm robust to an arbitrary number of byzantine attackers. IEEE Trans. Signal Process. 2019, 67, 5850–5864. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, G.; Wu, Q. Detecting abnormal power emission for orderly spectrum usage. IEEE Trans. Veh. Technol. 2019, 68, 1989–1992. [Google Scholar] [CrossRef]
- Jana, S.; Zeng, K.; Cheng, W.; Mohapatra, P. Trusted collaborative spectrum sensing for mobile cognitive radio networks. IEEE Trans. Inf. Forensics Secur. 2013, 8, 1497–1507. [Google Scholar] [CrossRef]
- Lee, S.; Zhang, Y.; Yoon, S.; Song, I. Order statistics and recursive updating with aging factor for cooperative cognitive radio networks under SSDF attacks. ICT Express 2019, 6, 3–6. [Google Scholar] [CrossRef]
- Sun, Z.; Xu, Z.; Hammad, M.Z.; Ning, X.; Wang, Q.; Guo, L. Defending against massive SSDF attacks from a novel perspective of honest secondary users. IEEE Commun. Lett. 2019, 23, 1696–1699. [Google Scholar] [CrossRef]
- Grissa, M.; Yavuz, A.A. Preserving the location privacy of secondary users in cooperative spectrum sensing. IEEE Trans. Inf. Forensics Secur. 2017, 12, 418–431. [Google Scholar] [CrossRef]
- Grissa, M.; Yavuz, A.; Hamdaoui, B. An efficient technique for protecting location privacy of cooperative spectrum sensing users. In Proceedings of the 2016 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), San Francisco, CA, USA, 10–14 April 2016; pp. 915–920. [Google Scholar]
- Du, H.; Fu, S.; Chu, H. A credibility-based Defense SSDF attacks scheme for the expulsion of malicious users in cognitive radio. Int. J. Hybrid Inf. Technol. 2015, 8, 269–280. [Google Scholar] [CrossRef] [Green Version]
- Sharifi, A.A. An effective and optimal fusion rule in the presence of probabilistic spectrum sensing data falsification attack. J. Commun. Eng. 2019, 8, 78–92. [Google Scholar]
- Chen, H.; Zhou, M.; Xie, L.; Li, J. Cooperative spectrum sensing with m-ary quantized data in cognitive radio networks under SSDF attacks. IEEE Trans. Wirel. Commun. 2017, 16, 5244–5257. [Google Scholar] [CrossRef]
- Feng, J.; Zhang, M.; Xiao, Y.; Yue, H. Securing cooperative spectrum sensing against collusive SSDF attack using XOR distance analysis in cognitive radio networks. Sensors 2018, 18, 370. [Google Scholar] [CrossRef] [Green Version]
- Feng, J.; Li, S.; Lv, S.; Wang, H.; Fu, A. Securing cooperative spectrum sensing against collusive false feedback attack in cognitive radio networks. IEEE Trans. Veh. Technol. 2018, 67, 8276–8287. [Google Scholar] [CrossRef]
- Fu, Y.; He, Z. Bayesian-Inference-Based sliding window trust model against probabilistic SSDF attack. IEEE Syst. J. 2019, 14, 1–12. [Google Scholar]
- Shrivastava, S.; John, S.; Rajesh, A.; Bora, P.K. Preventing collusion attacks in cooperative spectrum sensing. In Proceedings of the 2018 International Conference on Signal Processing and Communications (SPCOM), Bangalore, India, 16–19 July 2018. [Google Scholar] [CrossRef]
- Zhao, F.; Li, S.; Feng, J. Securing cooperative spectrum sensing against DC-SSDF attack using trust fluctuation clustering analysis in cognitive radio networks. Wirel. Commun. Mob. Comput. 2019, 2019, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Wan, R.; Ding, L.; Xiong, N.; Zhou, X. Mitigation strategy against spectrum- sensing data falsification attack in cognitive radio sensor networks. Int. J. Distrib. Sens. Netw. 2019, 15, 1–12. [Google Scholar] [CrossRef]
- Luo, Z.; Zhao, S.; Lu, Z.; Xu, J.; Sagduyu, Y.E. When attackers meet AI: Learning-empowered attacks in cooperative spectrum sensing. arXiv 2019, arXiv:1905.01430. Available online: https://arxiv.org/abs/1905.01430 (accessed on 4 May 2019).
- Lee, W.; Kim, M.; Cho, D. Deep cooperative sensing: Cooperative spectrum sensing based on convolutional neural networks. IEEE Trans. Veh. Technol. 2019, 68, 3005–3009. [Google Scholar] [CrossRef]
- Tilina, K.M.; Choi, K.W.; Saquib, N.; Hossain, E. Pattern classification techniques for cooperative spectrum sensing in cognitive radio networks: SVM and W-KNN approaches. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM’12), Anaheim, CA, USA, 3–7 December 2012; pp. 1260–1265. [Google Scholar]
- Tang, M.; Zheng, Z.; Ding, G.; Xue, Z. Efcient TV white space data base construction via spectrum sensing and spatial inference. In Proceedings of the 34th IEEE International Performance Computing and Communications Conference, IPCCC 2015, Nanjing, China, 14–16 December 2015; pp. 1–5. [Google Scholar]
- Mikaeil, A.M.; Guo, B.; Wang, Z. Machine learning to data fusion approach for cooperative spectrum sensing. In Proceedings of the 2014 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery, Shanghai, China, 13–15 October 2014; pp. 429–434. [Google Scholar]
- Ma, X.; Ning, S.; Liu, X.; Kuang, H.; Hong, Y. Cooperative spectrum sensing using extreme learning machine for cognitive radio networks with multiple primary users. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control. Conference (IAEAC), Chongqing, China, 12–14 October 2018; pp. 536–540. [Google Scholar]
- Eziama, E.; Ahmed, S.; Ahmed, S.; Awin, F.; Tepe, K. Detection of adversary nodes in machine-to-machine communication using machine learning-based trust model. In Proceedings of the 2019 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Ajman, UAE, 12–19 October 2019. [Google Scholar] [CrossRef]
- Sucasas, V.; Mantas, G.; Althunibat, S.; Ortega, J.F.M. Editorial: Security and privacy protection for mobile applications and platforms. Mob. Netw. Appl. 2020, 25, 151–152. [Google Scholar] [CrossRef] [Green Version]
- Bkassiny, M.; Li, Y.; Jayaweera, S.K. A survey on machine-learning techniques in cognitive radios. IEEE Commun. Surv. Tutor. 2013, 15, 1136–1159. [Google Scholar] [CrossRef]
- Oksanen, J.; Lundén, J.; Koivunen, V. Reinforcement learning based sensing policy optimization for energy efficient cognitive radio networks. Neurocomputing 2011, 80, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Shilton, A.; Palaniswami, M.; Ralph, D.; Chung Tsoi, A. Incremental training in support vector machine. IEEE Trans. Neural Networks 2005, 16, 114–131. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thilina, K.M.; Choi, K.W.; Saquib, N.; Hossain, E. Machine learning techniques for cooperative spectrum sensing in cognitive radio networks. IEEE J. Sel. Areas Commun. 2013, 31, 2209–2221. [Google Scholar] [CrossRef]
- Tang, Y.J.; Zhang, Q.Y.; Lin, W. Artificial neural network based spectrum sensing method for cognitive radio. In Proceedings of the 2010 6th International Conference on Wireless Communications Networking and Mobile Computing (WiCOM), Chengdu, China, 23–25 September 2010; pp. 1–4. [Google Scholar]
- Choi, K.W.; Hossain, E.; Kim, D.I. Cooperative spectrum sensing under a random geometric primary user network model. IEEE Trans. Wirel. Commun. 2011, 10, 1932–1944. [Google Scholar] [CrossRef]
- Xue, H.; Gao, F. A machine learning based spectrum-sensing algorithm using sample covariance matrix. In Proceedings of the 2015 10th International Conference on Communications and Networking, Shanghai, China, 15–17 August 2015; pp. 476–480. [Google Scholar]
- Sobabe, G.C.; Song, Y.; Bai, X.; Guo, B. A cooperative spectrum sensing algorithm based on unsupervised learning. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, Biomedical Engineering and Informatics, Shanghai, China, 14–16 August 2017; pp. 1–6. [Google Scholar]
- Gul, N.; Qureshi, I.M.; Omar, A.; Elahi, A.; Khan, M.S. History based forward and feedback mechanism in cooperative spectrum sensing including malicious users in cognitive radio network. PLoS ONE 2017, 12, e0183387. [Google Scholar] [CrossRef] [PubMed]
- Gul, N.; Qureshi, I.M.; Akbar, S.; Kamran, M.; Rasool, I. One-to-Many relationship based kullbackleibler divergence against malicious users in cooperative spectrum sensing. Wirel. Commun. Mob. Comput. 2018, 2018, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Gul, N.; Qureshi, I.M.; Elahi, A.; Rasool, I. Defense against malicious users in cooperative spectrum sensing using genetic algorithm. Int. J. Antennas Propag. 2018, 2018, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Gul, N.; Naveed, A.; Elahi, A.; Khattak, T.; Qureshi, I.M. A combination of double sided neighbor distance and genetic algorithm in cooperative spectrum sensing against malicious users. In Proceedings of the 2017 14th International Bhurban Conference on Applied Sciences & Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; pp. 746–753. [Google Scholar]
- Gul, N.; Mansoor, I.; Naveed, A.; Elahi, A.; Rasool, I. Secured soft combination schemes against malicious—Users in cooperative spectrum sensing. Wirel. Pers. Commun. 2019, 108, 1–20. [Google Scholar] [CrossRef]
- Moeyersons, J.; Varon, C.; Testelmans, D.; Buyse, B.; van Hufel, S. ECG artefact detection using ensemble decision trees. In Proceedings of the Computing in Cardiology, Rennes, France, 24–27 September 2017; pp. 1–4. [Google Scholar]
- Lee, H.; Kim, S. Decision tree ensemble classifers for anomalous propagation echo detection. In Proceedings of the 8th Joint International Conference on Soft Computing and Intelligent Systems and 17th International Symposium on Advanced Intelligent Systems, SCIS-ISIS ’16, Sapporo, Japan, 25–28 August 2016; pp. 391–396. [Google Scholar]
- Madani, S.S.; Abbaspour, A.; Beiraghi, M.; Dehkordi, P.Z.; Ranjbar, A.M. Islanding detection for PV and DFIG using decision tree and AdaBoost algorithm. In Proceedings of the 3rd IEEE PES Innovative Smart Grid Technologies Europe, ISGT Europe ’12, Berlin, Germany, 14–17 October 2012; pp. 1–8. [Google Scholar]
- Akbari, M.; Manesh, M.R.; Saleh, A.A.; Ismail, M. Improved soft fusion based cooperative spectrum sensing using particle swarm optimization. IEICE Electron. Express 2012, 9, 436–442. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Zhu, X.; Fujii, T. Ensemble deep learning based cooperative spectrum sensing with semi-soft stacking fusion center. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Timcenko, V.; Gajin, S. Ensemble classifiers for supervised anomaly based network intrusion detection. In Proceedings of the 13th IEEE International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 7–9 September 2017; pp. 13–19. [Google Scholar]
- Liu, Z.; Li, C.; Gao, X.; Wang, G.; Yang, J. Ensemble-based Depression detection In speech. In Proceedings of the IEEE International Conference on Bioinformatics and Biomedicine (BIBM), Kansas City, MO, USA, 13–16 November2017; pp. 975–980. [Google Scholar]
- Opitz, D.; Maclin, R. Popular ensemble methods: An empirical study. J. Artif. Intell. Res. 1999, 11, 169–198. [Google Scholar] [CrossRef]
- Zhou, Z.H. Introduction in Ensemble Methods: Foundation sand Algorithms; CRCPress: Boca Raton, FL, USA, 2012; Chapter 1; pp. 1–20. [Google Scholar]
- Ahmad, H.B. Ensemble classifier based spectrum sensing in cognitive radio networks. Wirel. Commun. Mob. Comput. 2019, 2019, 1–17. [Google Scholar] [CrossRef] [Green Version]















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gul, N.; Khan, M.S.; Kim, S.M.; Kim, J.; Elahi, A.; Khalil, Z. Boosted Trees Algorithm as Reliable Spectrum Sensing Scheme in the Presence of Malicious Users. Electronics 2020, 9, 1038. https://doi.org/10.3390/electronics9061038
Gul N, Khan MS, Kim SM, Kim J, Elahi A, Khalil Z. Boosted Trees Algorithm as Reliable Spectrum Sensing Scheme in the Presence of Malicious Users. Electronics. 2020; 9(6):1038. https://doi.org/10.3390/electronics9061038
Chicago/Turabian StyleGul, Noor, Muhammad Sajjad Khan, Su Min Kim, Junsu Kim, Atif Elahi, and Zafar Khalil. 2020. "Boosted Trees Algorithm as Reliable Spectrum Sensing Scheme in the Presence of Malicious Users" Electronics 9, no. 6: 1038. https://doi.org/10.3390/electronics9061038
APA StyleGul, N., Khan, M. S., Kim, S. M., Kim, J., Elahi, A., & Khalil, Z. (2020). Boosted Trees Algorithm as Reliable Spectrum Sensing Scheme in the Presence of Malicious Users. Electronics, 9(6), 1038. https://doi.org/10.3390/electronics9061038