1. Introduction
Nowadays, 50% of the world population lives in cities. In many countries, like Brazil, this percentage is greater than 80%. The mobility in these highly populated areas must be provided by non-polluting, energetically efficient and public transportation systems. Cities should belong to citizens and not to drivers, as we see today. In the near future, private vehicles, even electric ones, will be prohibitive. The trajectory of cars in the present century will be comparable to that of cigarettes during the XX century: from a fashionable consumer good to a villain of society.
This brings us to the concept of a smart city, which involves six axes: Government, Mobility, Environment, Economy, People and Living [
1]. In the case of the axe “Mobility”, the focus of this paper concerns efficiency and flexibility.
The Magnetically Levitated (MagLev) Technology, applied to urban transportation, can fulfill the modern and future mobility requirements. Moreover, the MagLev technology based on the diamagnetic property of high critical temperature superconductors in the proximity of the field produced by rare earth permanent magnets, named in this paper as MagLev
2, offers advantages in terms of both construction and operation in comparison not only with wheel and rail solutions but also with other MagLev technologies. There is until today no commercially available MagLev
2 vehicle, but the perspectives are promising. The prototype developed in Brazil, named MagLev
2-Cobra, reached level 7 in the NASA defined Technological Readiness Level (TRL) and is the most advanced one based on this technological scale [
2]. The experimentally available data confirm very low energy consumption due to the absence of wheel-rail friction and light weight. This fact makes the MagLev
2 an excellent vehicle for a world dominated by distributed energy resources, such as photo voltaic panels, small scale wind power and batteries, which allows the implementation of smart-grid concepts.
This paper begins with a review of Magnetic Levitation (MagLev) Methods applied to transportation. This is followed by a short description of the MagLev2-Cobra prototype and the state of the art of MagLev technology in the world. A comparison between MagLev2 with other MagLev methods completes the theoretical approach. Based on the experimental data of the MagLev2-Cobra project, the perspectives of operation in an environment of intermittent energy are unveiled. The paper concludes with the steps to turn MagLev2-Cobra into a Commercial Product.
Certainly, the wheel still represents an icon of human mobility. As the main contribution, this paper shows that a new paradigm, namely Magnetic Levitation, available with the technical achievements on superconductors, permanent magnets, and other new materials will impact urban mobility along this century.
2. Magnetic Levitation (MagLev) Methods Applied to Transportation
Magnetic Levitation techniques (MagLev), promising for applications in mass transport, are subdivided into three groups, described in the following [
3].
2.1. Electromagnetic Levitation (EML)
This technique has its best showcase in the German levitation train proposal, Transrapid [
4], which was commercially implanted in the year 2003, along a 30 km double line connection between the international airport in Pudong, Shanghai, and Lujiazui, a financial district in the city (
http://www.smtdc.com). MagLev projects in commercial urban operation in Japan, China and South Korea also employ EML technology.
The basic physical foundation explores the attraction force that exists between an electro magnet and a ferromagnetic material. Vertical stabilization, in this case, is only possible with an active control system and regulator properly tuned (
Figure 1a).
2.2. Electrodynamic Levitation (EDL)
This type of levitation requires the movement of a magnetic field in the vicinity of a conductive material. The Japanese proposal for a levitation train, JR-MagLev (
http://www.rtri.or.jp), applies this principle. There is a double line for demonstration and testing in Yamanashi, between Tokyo and Osaka, operating since 1997. In 2013, this line was expanded and currently covers 42.8 km. Japan plans to extend it to complement the Shinkansen (HST wheel-rail), which links these two cities, but the technology has not yet been commercially deployed.
To understand the method, assume a magnet moving over a conductive sheet (e.g., aluminum). It is known that eddy currents will be induced in the conductor. These currents, in turn, generate another magnetic field which, by Lenz’s law, will oppose the action of the field from the imam. The interaction between these two fields produces a repulsion force, which increases with speed and allows for levitation. The system, if properly adjusted, can be passively stabilized laterally, but requires support wheels at low speeds (
Figure 1b).
2.3. Superconducting Levitation (SML)
This method makes use of the diamagnetic property that excludes external magnetic fields from inside a superconductor. In the case of type II superconductors, this exclusion is partial, which reduces the levitation force but leads to the stability of the levitation due to the so-called “pinning” effect [
5]. This property, which represents the great differential in relation to the EDL and EML methods, could only be properly explored from the end of the 20th century with the advent of new magnetic materials, such as Nd
2Fe
14B (NdFeB), and high critical temperature superconducting (HTS) ceramics, such as YBa
2Cu
3O
X (YBCO). Brazil, with the MagLev
2-Cobra project, is the first country in the world to have a full-scale demonstration line of this technology (
Figure 1c).
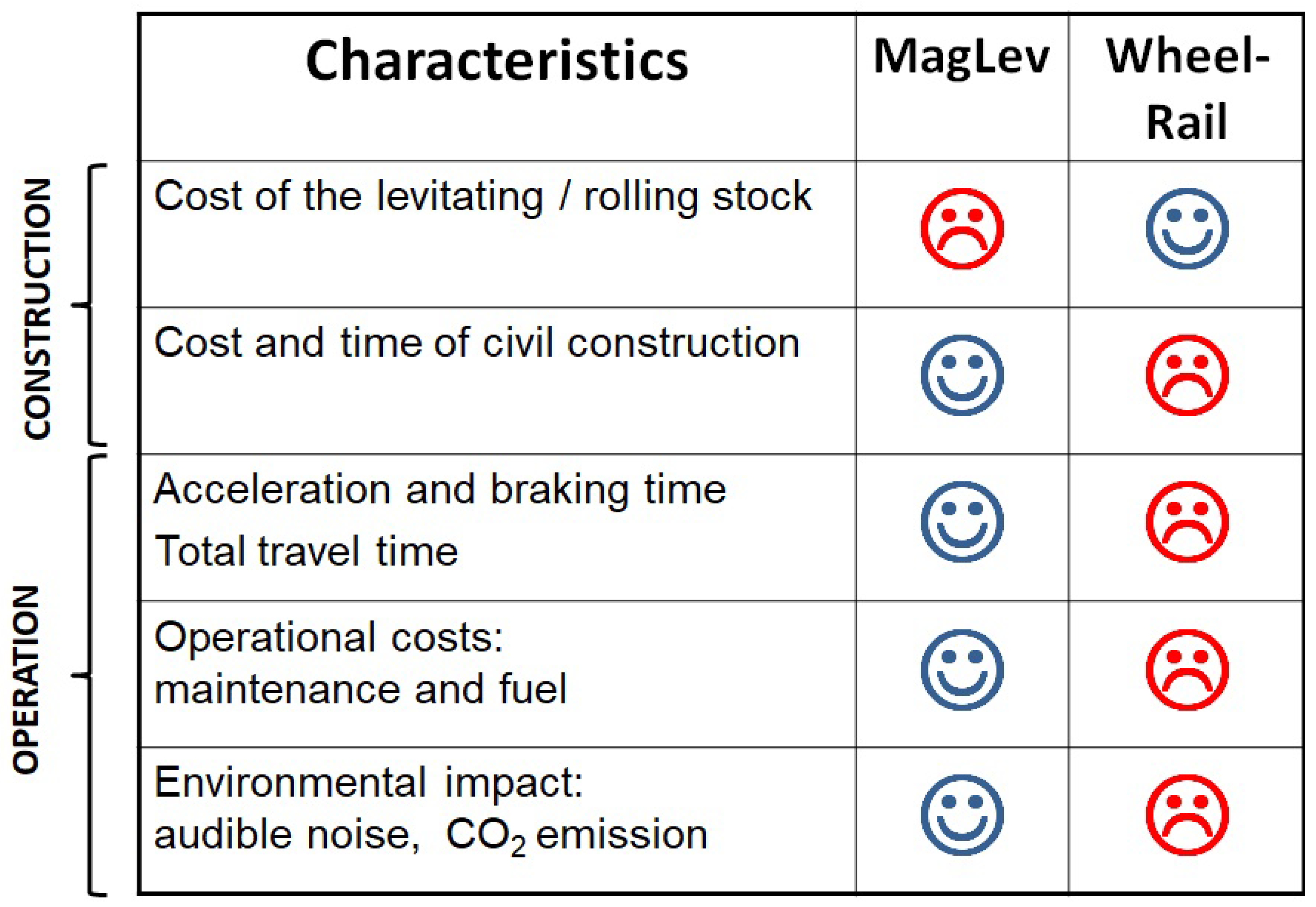
In a simplified way, Magnetic Levitation, regardless of the technique employed, is compared with the traditional wheel-rail technology for transportation, as shown in
Figure 2, in which construction aspects (first two lines) and operational aspects (last three lines) are separated.
3. Description of the MagLev2-Cobra Prototype
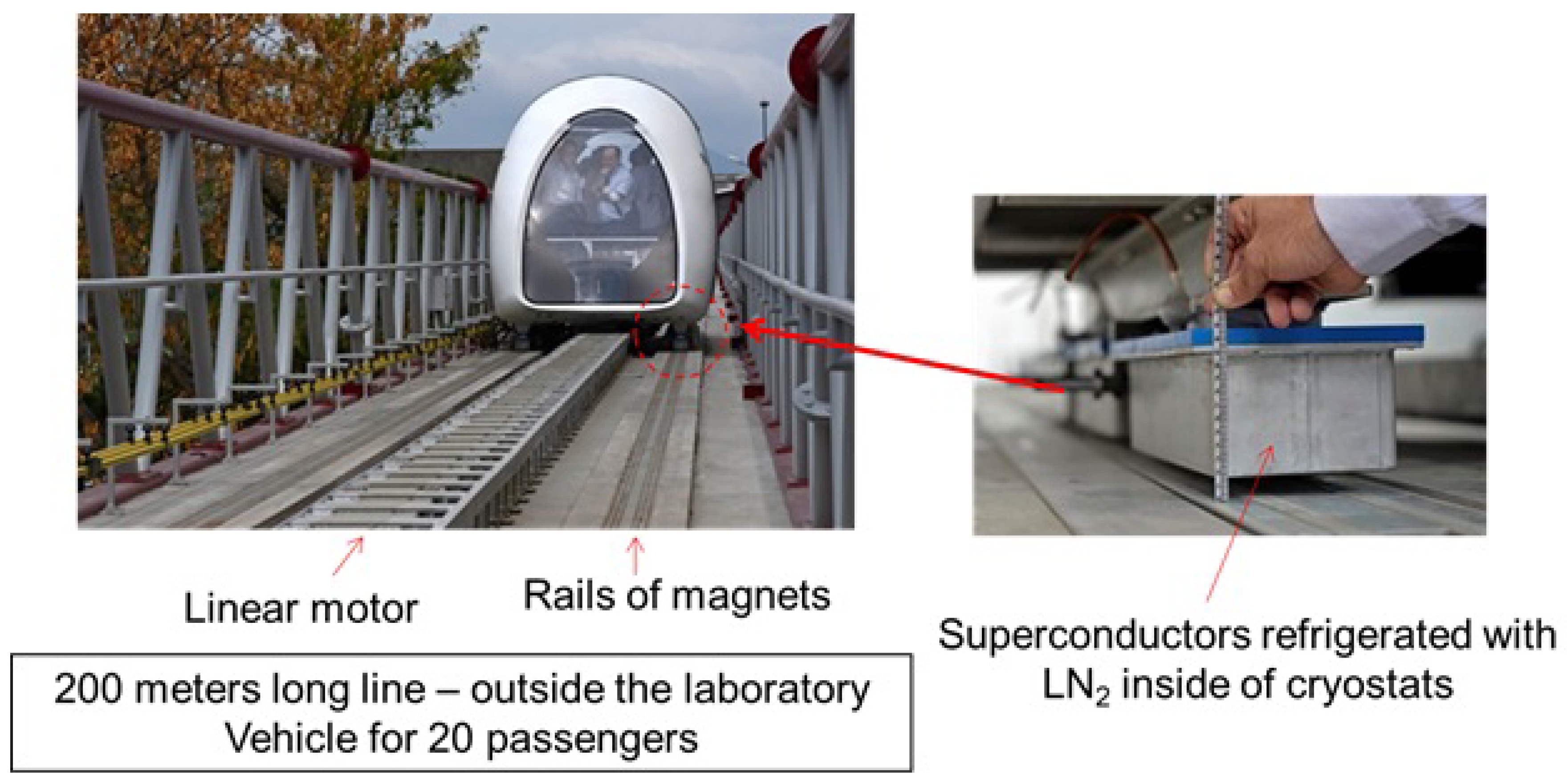
Figure 3 depicts the MagLev
2-Cobra project as a graphic abstract. The vehicle is 6m long and is composed of four modules. The test line extends for 200 m. Two parallel lines of permanent magnetic rails interact with superconductors installed inside of 24 cryostats (12 at each side) filled with liquid nitrogen. The traction is given by a short primary linear induction motor.
The debut was on 1 October 2014, on the last day of the 22nd International Conference on Magnetically Levitated Systems and Linear Drives, held in Rio de Janeiro. After one year of improvements, the system was opened to the public. The visits take place every Tuesday, from 11 a.m. to 3 p.m. Until today, more than 20 thousand people, Brazilians and foreigners, including students, professors, staff, families, children, politicians, investors, took a ride and registered the presence in a memory book.
4. State of the Art of MagLev Trains
MagLev projects are usually divided into two main groups: high-speed (HST) and urban.
Table 1 details some striking features of the HST projects.
China has operated the Germany Transrapid technology commercially in Pudong Airport, Shanghai, since October 2003. The velocity record of 501 km/h was tested in November 2003. Nowadays, the maximal cruise speed is 450 km/h. d Japan plans to extend the Yamanashi test line and to start the operation connecting Tokyo-Nagoya in 2027 and Tokyo-Osaka in 2045. The velocity record 603 km/h was reached in April 2015, but the foreseen cruise speed will be 500 km/h.
These two icon projects use different levitation methods, but the traction, in both, is given by Linear Synchronous Motors (LSM) of long primary.
Table 2 details the urban projects. It should be noted the greater interest in urban projects, the category in which MagLev
2-Cobra is inserted [
6].
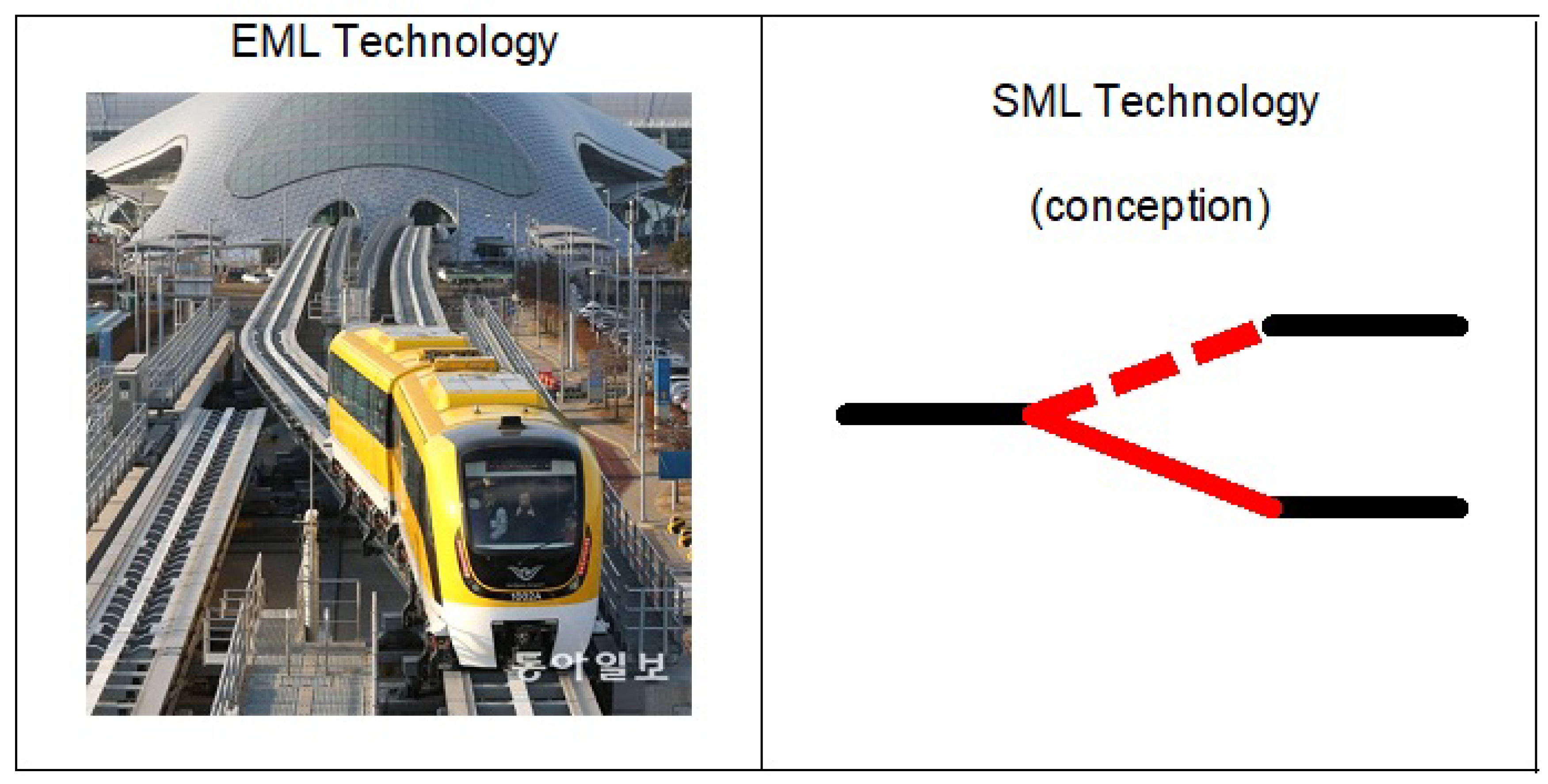
All commercially available Urban-MagLev use EML technology for the levitation method [
7].
The SML technology, adopted in the MagLev
2-Cobra project, does not yet have a commercial prototype, but it is attracting the attention of several groups around the world, the most active of which are German, from IFW/Dresden [
8], and Chinese, from Southwest Jiaotong University (SWJTU) [
9], shown in
Figure 4.
Linear Induction Motors (LIM), short primary, promote the traction in all Urban MagLev Projects.
5. Comparison of MagLev2 Technology with Other MagLev Methods
The technology applied in the MagLev2-Cobra urban transportation system proves to be simpler and lighter than the EML technology used in commercially available urban MagLev trains. This is because the levitation mechanism does not depend on heavy electromagnets installed in the vehicle, also making the elevated track more slender. Moreover, the MagLev EML Track Switch requires movement of the track. In the MagLev2-Cobra, the switch will result from the mere energizing of the track in the changing places, where the magnets on the track will be replaced by electromagnets.
These characteristics suggest the adoption of the name MagLev
2-Cobra. The exponent “2” refers to “Lev” raised to the square, highlighting the differentiation between the MagLev
2-Cobra project for urban transport from the other MagLev projects, based on the EML technology of attractive forces. That is because, the Cobra project, besides levitating, is light.
Table 3 explains the name, having as root Latin.
Cobra is the Portuguese name for Snake, referring to a smooth and silent movement, along sharped curves and slopes, which are the main characteristics of the system. Cobra is also in English the “Naja Snake”, reinforcing the name.
6. Experimental Data of the MagLev2-Cobra Project
Table 4 and
Table 5 present experimental data obtained over five years of operation of this experimental system.
Table 6 presents a comparison of normalized energy consumption with other urban transportation systems [
10].
Twelve solar panels, shown in
Figure 8, supply the energy necessary for operation.
7. MagLev2-Cobra Operation with a Smart-Grid
The world is experiencing an energy transition process in which centralized generation, represented by large power plants, has given rise to small production, which is usually closer to consumers’ centers and, therefore, is called distributed generation. Among these technologies, photo voltaic (PV) panels and small scale wind power stand out, which are characterized by the intermittency resulting from the availability of sun and wind, respectively, which imply the need to adopt advanced forms of energy storage, monitoring, control, and protection [
11].
Therefore, energy systems have evolved from the concept of distributed generation to that of distributed energy resources (DER), which are made up of energy generation or storage devices located at consumers’ facilities (behind-the-meter) or in the distribution systems, capable of supplying partially or totally the local demand. Among the DER, we can highlight the distributed generation, batteries, demand response and electric vehicles.
For the monitoring, control, and protection of power systems, automation, computing, and digital communication technologies, that is, smart grids have been used intensively. This requires the installation of smart meters and bidirectional communication networks between meters and data centers control, in addition to the availability of other types of sensors and control devices that allow the automation of the operation of the distribution grid. They also include Data Analysis and Big Data technologies to process the large volume of information from advanced measurement systems, identify patterns and assist decision processes based on that information, through the application of mathematical or mechanical methods.
It is noted, therefore, that the expansion of the use of the MagLev2-Cobra is fully inserted in the context of smart cities, in which low-cost mass transportation is used, which does not require fossil fuel burning or electricity from large power plants. It is a smart-grid, where the electricity for propelling the vehicle comes from a PV panel, which can be associated with a set of batteries and a smart meter that allows controlling both the supply and the use of energy.
8. Conclusions: The Steps to Turn MagLev2-Cobra into a Commercial Product
Figure 9 outlines the development stages of the MagLev
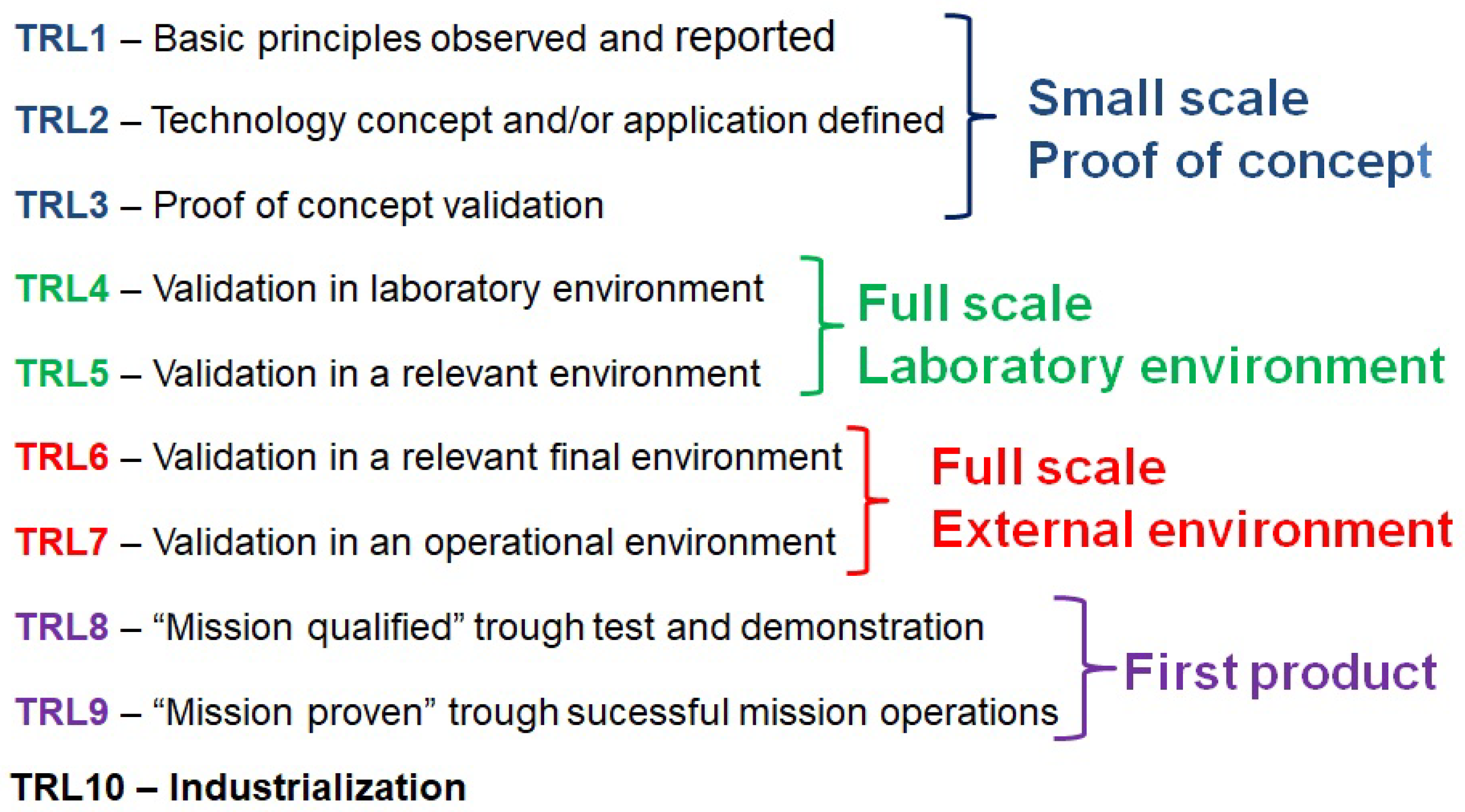
2-Cobra project, framing them on the TRL (“Technology Readiness Level”) scale proposed by NASA [
2], as shown in
Figure 10. In fact, the scale TRL only goes up to nine. We introduced the TRL10 level, which does not belong to the Standard. This is understandable, since NASA is satisfied with a few copies of the equipment it develops. However, we are not, and industrialization on a large scale means a new level of difficulty.
Each step of the TRL scale requires more mental, physical and financial effort, as expected from a climber who wants to reach the top of Everest. The MagLev
2-Cobra development has been reported in papers regularly presented at the International Conference on Magnetically Levitated Systems and Linear Drives, the most important conference on MagLev technology, as organized in
Table 7.
The industrialization, the last step, imposes cooperation with companies. This effort is underway and should be achieved in a period of three years of hard work and some luck.
This 20 year long journey does not differ from similar experiences of other MagLev vehicles. For instance, the Germany efforts to turn the Transrapid technology into a commercial product took more than 30 years. The Japanese JR-MagLev is planned to start commercial operation at the end of this decade, after more than 50 years since the first research efforts. The HSST-Linimo, EcoBee, and Chinese urban MagLev Systems also lasted for more than 30 years to overcome all TRLs levels. These facts serve as an example and an incentive to the MagLev2-Cobra team to endure and work hard to turn the system into a commercial product.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}