1. Introduction
Modeling and analysis of physical phenomena is an essential step in scientific work. There are many important mathematical models for capturing different situations in various fields. Among many, Korteweg–de Vries models are essential due to their ability of capturing physical situations, such as the motion of long waves in shallow water with weak non-linearities. Initially, this model was derived as 1D small amplitude and long surface gravity waves. Flood analysis and ocean flow analysis are a few uses of shallow water equations. Scott Russell in 1834 [
1], Boussinesq and Rayleigh in 1870 [
2,
3,
4], and Korteweg and De Vries in 1895 [
5] played a major role in the discovery of the KdV model. These models have many uses in collision-free hydromagnetic waves, stratified internal waves, shock wave formation [
6], fluid and quantum mechanics [
7], and in biology [
8].
A generalized fifth-order time-fractional KdV equation is usually in the following form of non-linear partial differential equation(PDE):
where
is the wave function with
and
as the space and time variables, respectively. In addition,
represents the fractional order parameter. The model in Equation (
1) has various physical applications in acoustic magnetic propagation in plasma, incompressible and inviscid fluids, gravitational field, etc. It typically consists of one linear dispersive term and three non-linear terms. The linear dispersive term has a momentous role in the balancing of non-linearity and dispersion effects of soliton behavior [
9];
a,
b, and
c in Equation (
1) are real constant parameters. Different values of these parameters give different versions of time-fractional KdV equations. For instance,
a = 45,
b = 15, and
give a time-fractional, Sawada–Kotera equation [
10]. Fixing
a,
b, and
c as 2, 6, and 3, respectively, leads to a time-fractional Ito equation [
11]. In addition, when
a = 30,
b = 20, and
c = 10, it gives a time-fractional Lax’s KdV equation [
12,
13]. Similarly,
a = 45,
b = −15, and
c = −15 leads to a time-fractional Kaup–Kupershmidt equation [
14]. Many researchers tried to find exact solutions of these equations in [
15,
16,
17,
18].
Since fractional calculus deals with the calculation of non-integer order derivatives and integrals, it appeals to a wide range of audiences while dealing with fractional ordinary and partial differential equations. Different numerical and analytical methods, including the homotopy analysis method [
19], the residual power series method [
20], the variation iteration method [
21], the Adomian decomposition method [
22], the Bernstein polynomials method [
23], homotopy perturbation method [
24], etc., are used in the literature while dealing with fractional problems. Many modifications of existing techniques are also applied to fractional KdV equations [
25,
26,
27].
The homotopy perturbation method (HPM), introduced by He [
28], provides a convenient technique to find analytical solutions of linear and non-linear differential equations in both fractional and integer form. To reduce errors and increase its reliability, many modifications of HPM [
29,
30,
31,
32] have been adapted in the literature. The Laplace homotopy perturbation method (LHPM), which combines HPM with Laplace transform, is an efficient and convenient modification of HPM for solving fractional and integral differential equations [
33]. Results obtained from LHPM are highly accurate and straightforward without imposing any restrictions on the concerned model. In this paper, we have extended LHPM to generalized fifth-order highly non-linear time-fractional KdV models. In the rest of the manuscript,
Section 2 and
Section 3 consist of preliminaries and the general concept of LHPM for fractional KdV equations. Convergence and error estimation are presented in
Section 4. Applications and solutions of different KdV models are explained in
Section 5. Discussion and conclusion are presented in
Section 6 and
Section 7, respectively.
3. Fundamental Concept of the Laplace Homotopy Perturbation Method for Fifth-Order Time-Fractional KdV Models
Let us consider a general non-linear, fifth-order, time-fractional KdV equation as:
with initial conditions
where
is an unknown function with
as its fractional derivative;
a,
b, and
c are constant parameters that give distant versions of time fractional KdV equations for different values.
The first step of the Laplace transform algorithm is applied on both sides of (
5), which gives
Now, we can construct a homotopy
where
is the initial guess, and it satisfies the given conditions.
Expanding
in Taylor series with regard to
p gives:
Substituting (
10) into (
9) and then comparing the coefficients of
p, we have distinct order problems.
The problem at the first order is:
Employing inverse Laplace transform gives
The the problem at the
kth order is:
By taking Inverse Laplace transform, we have
The approximate solution of the general fifth-order KdV equation is
Residual error is observed by substituting (
15) in a given time fractional KdV Equation (
5) as:
5. Solutions of Time-Fractional KdV Models Using Laplace Homotopy Perturbation Method
Example 1. Consider the time fractional, Sawada–Kotera equationassociated with initial conditionwhere 0. The exact solution of (25) is: Solution: Taking Laplace transform of (
25) and then by using (
3), we have
Using (
9), homotopy can be constructed as follows:
where
is the initial guess which satisfies the initial condition (
26). For the current problem, the following initial guess is taken
Expanding in Taylor’s series with regard to p, and then comparing the coefficients of identical powers of p, we have.
Taking inverse Laplace transform leads to a solution at the first order:
The rest of values for
with i ≥ 5 can be computed in a similar way. The approximate solution of (
25) can be captured by
Residual error is obtained by substituting (
39) in (
25) as follows:
Example 2. Consider the following time-fractional Ito modelalong with the initial conditionwhere 0. The exact solution of (41) is Solution: Applying the Laplace transform on (
41) and using (
3) give the following:
Utilizing (
9) homotopy for the given problem is
where
By replacing (
10) in (
41) and then comparing coefficients of like power of
p, leads to the following:
Continuing this way, higher order problems and solutions can be formulated. The approximate solution of (
41) is
Residual error is derived by substituting the obtained approximate solution in (
41)
Example 3. Consider the following time-fractional Lax’s KdV modelwith initial conditionwhere 0 is an arbitrary constant. The exact solution of (53) is Solution:
Following the similar steps mapped out in
Section 3, we have
The inverse Laplace transform leads to the approximate solution
. The residual error of the current problem is
Results related to Example 3 are in
Table 1 and
Table 2 and
Figure 1,
Figure 2 and
Figure 3.
Example 4. Consider the following time-fractional Kaup–Kupershmidt modelassociated with initial conditionwhere λ and are arbitrary constants. The exact solution of (61) is: Solution:
Using basic steps given in
Section 3, we obtain the following
The inverse Laplace transform leads to the approximate solution
. The residual error of the concerned problem is
6. Discussion
In this manuscript, the Laplace transform with homotopy perturbation method is proposed for the solution of generalized fifth-order time-fractional KdV models. The proposed method is tested against different time-fractional KdV models, including Sawada–Kotera, Ito, Lax, and Kaup–Kupershmidt KdV equations. These equations belong to the prominent form of fractional KdV family hierarchy. The main focus of this paper is to propose a new method for the solution and analysis of KdV equations in a fractional environment. Graphical and numerical comparisons of the obtained results were also made to provide strong evidence for the usage of the proposed technique. Obtained results are compared with existing ones from the literature.
The proposed method is firstly applied to the Sawada–Kotera model in Example 1, and the results are shown in
Table 3 and
Table 4.
Table 3 presents a comparison of LHPM with exact and fractional conformable residual power series algorithm (FCRPSA) results. These results showed the efficiency of LHPM over FCRPSA. In
Table 4, error analysis has been performed in the fractional domain by finding residual errors at different values of
. The results are consistent through out the fractional domain. It is also observed that increasing the value of the fractional parameter decreases the error.
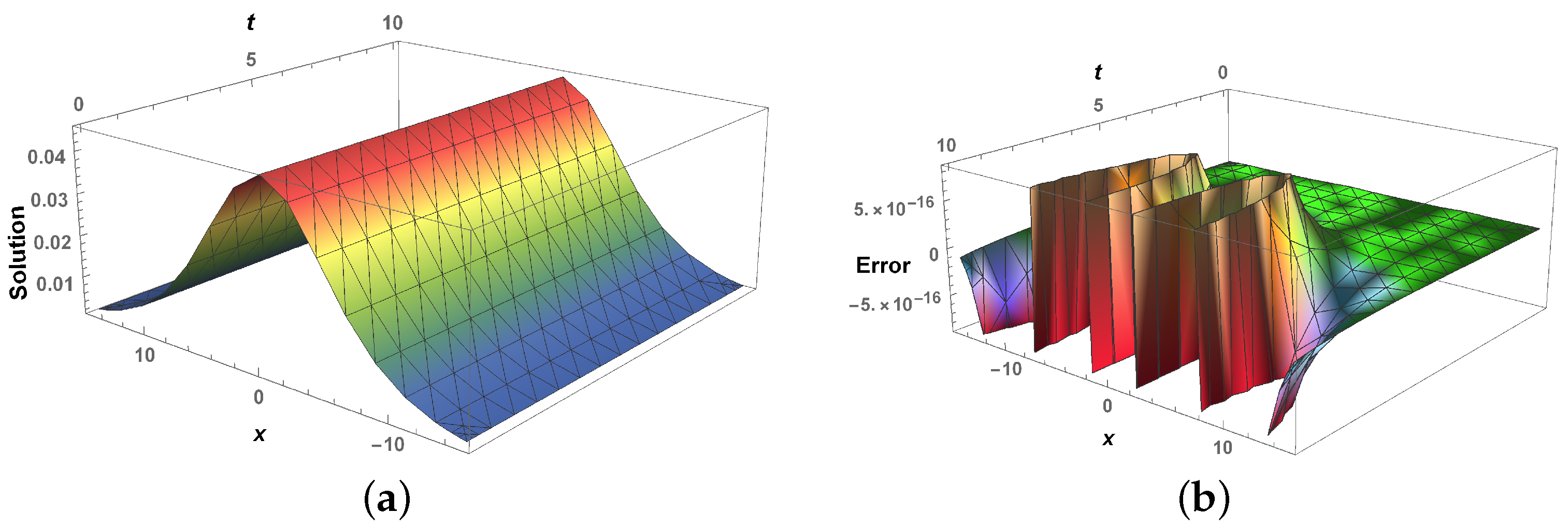
Figure 4 illustrates the three-dimensional plot of approximate solutions and errors at
= 1. The 3D solution curve (part a) depicts that at
and
= 0, the crest of the wave is highest, and as the distance and time increased, the altitude of the wave started to decrease.
Figure 5 represents the effect of fractional parameter
on the water waves at
= 10. It is observed that for the time range between 0 and 1, increasing
decreases the water wave profile. Elevation and motion of the surface of water waves in two-dimensional form at a fixed time for various
can be seen in
Figure 6. Near
= 0, the altitude of the wave was highest, but it started to smoothen out as the distance increased.
For the time-fractional Ito equation in Example 2,
Table 5 is the comparison of LHPM with the modified Adomian decomposition method (mADM) and FCRPSA error at
= 1 and
k = 0.01, whereas
Table 6 displays the residual errors at different values of
. In both tables, it can be seen that LHPM is a reliable and powerful technique.
Figure 7 is the LHPM solution and error graphs in 3D form, which displays the decrease in wave altitude with the increase of distance and time. The effect of different values of fractional parameter on the water waves surface at distance
= 10 can be seen in
Figure 8, which shows that increasing
decreases the water wave level for the interval 0
1. A 2D plot to evaluate the motion of the wave surface is displayed in
Figure 9 for
k = 1,
= 3, and
= 0.2, 0.4, 0.8, and 1.0. It can be seen that nearby
= 0, the wave is at its peak but starts declining as the distance becomes larger.
In Example 3, a time-fractional Lax’s KdV equation is solved numerically and analytically by LHPM. A comparison of FCRPSA, mADM, and LHPM absolute errors at
= 1 in
Table 1 shows that LHPM is more productive than mADM and FCRPSA. Residual errors for various
values are also shown in
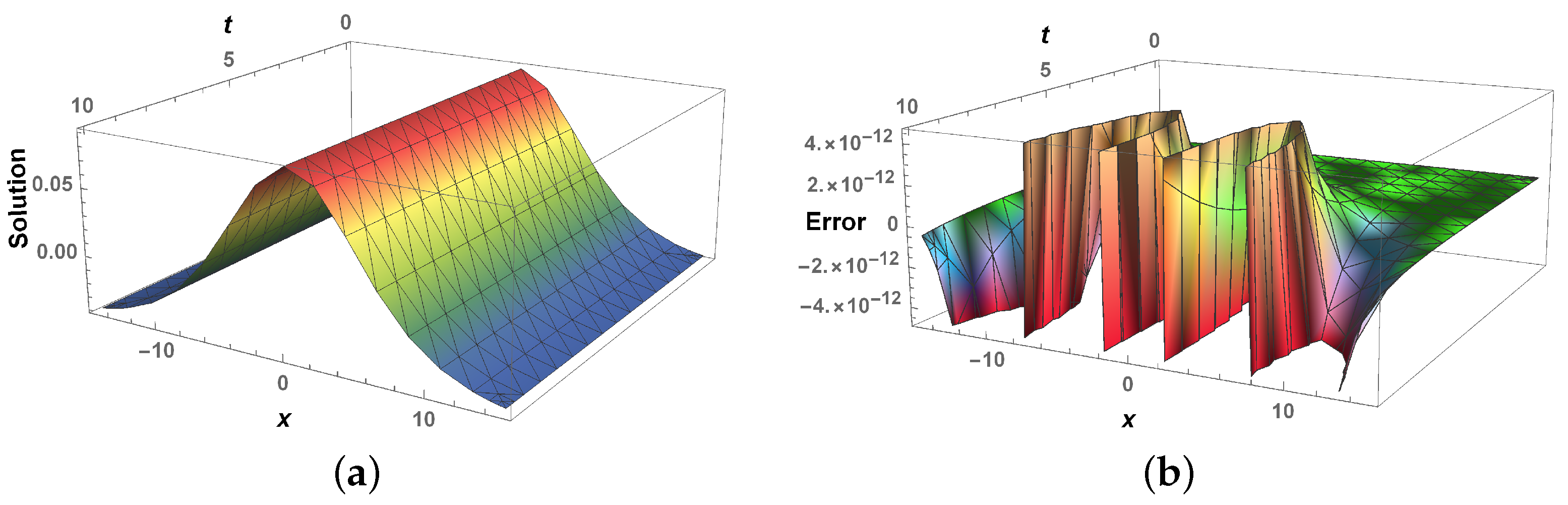
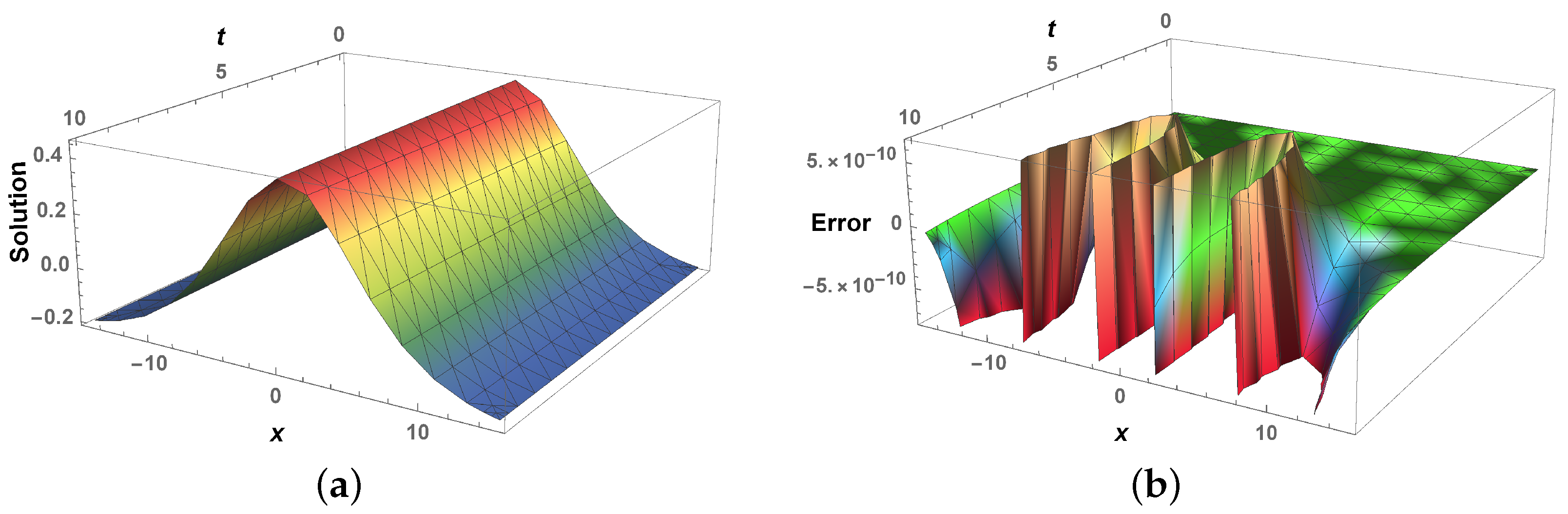
Table 2. A 3D LHPM solution plot and an error plot (
Figure 1) are also displayed. From
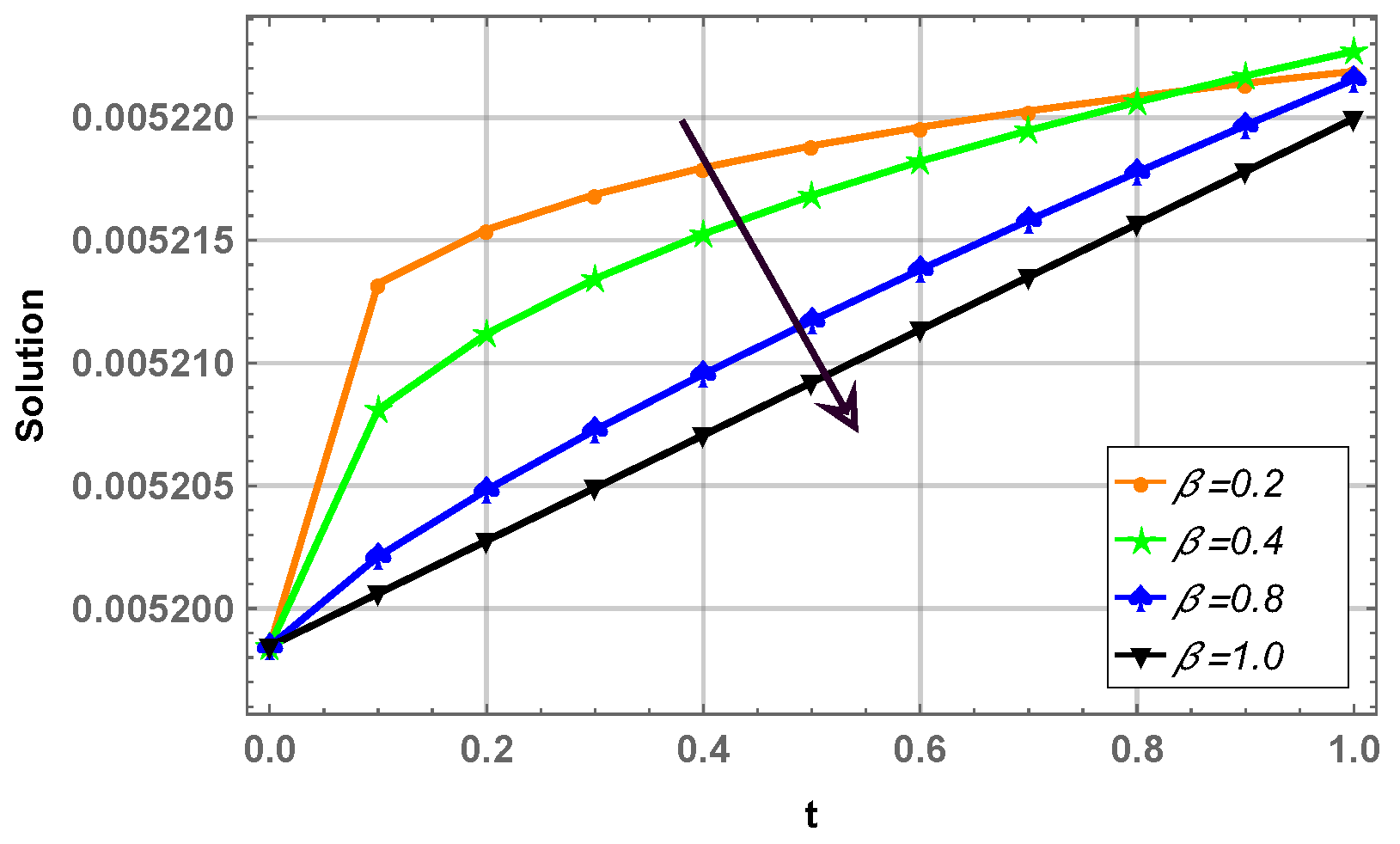
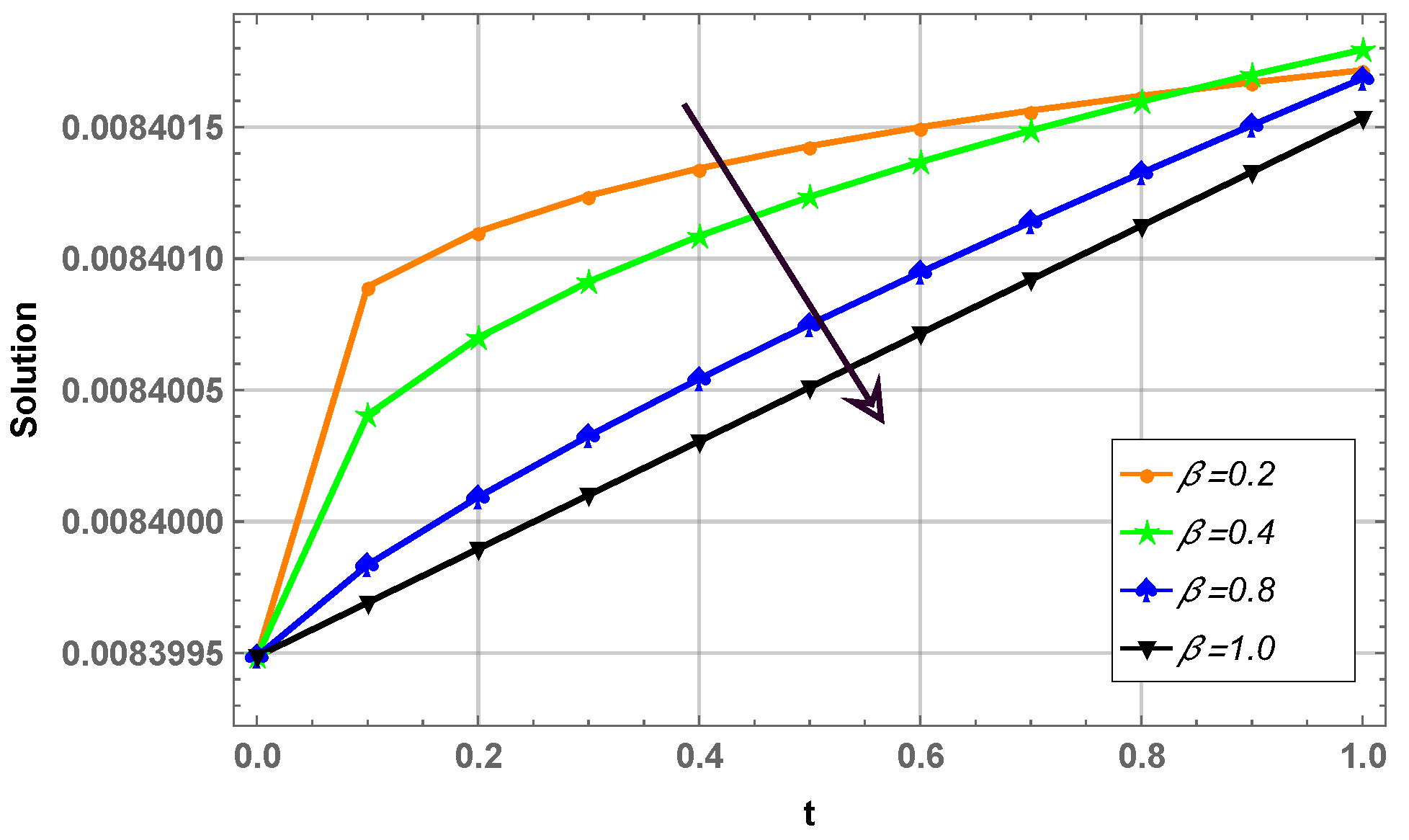
Figure 2 at
k = 0.1 and
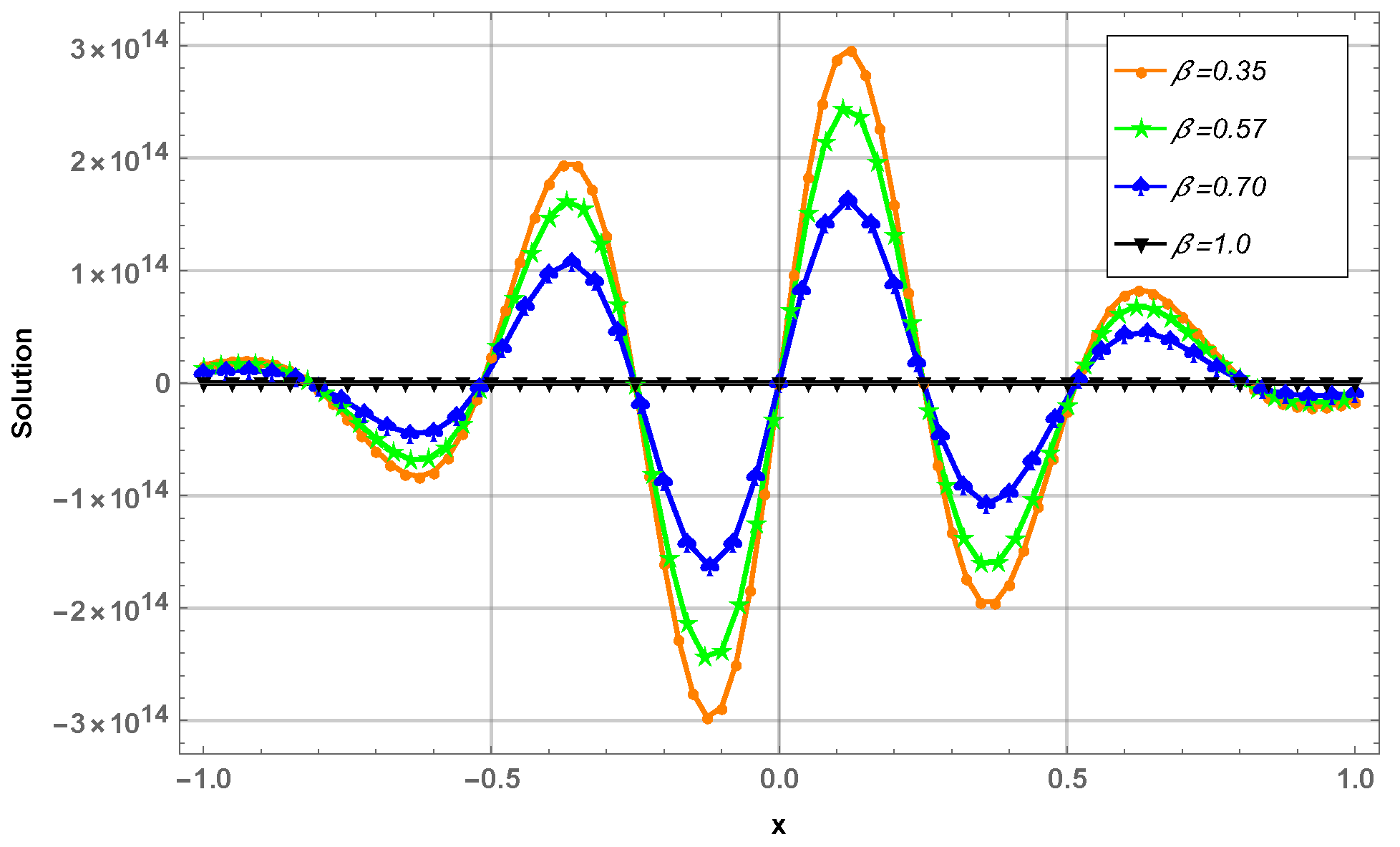
= 10, it is observed that increasing the value of the fractional parameter for the fifth-order Lax’s KdV model decreases the waves level. The effect of various
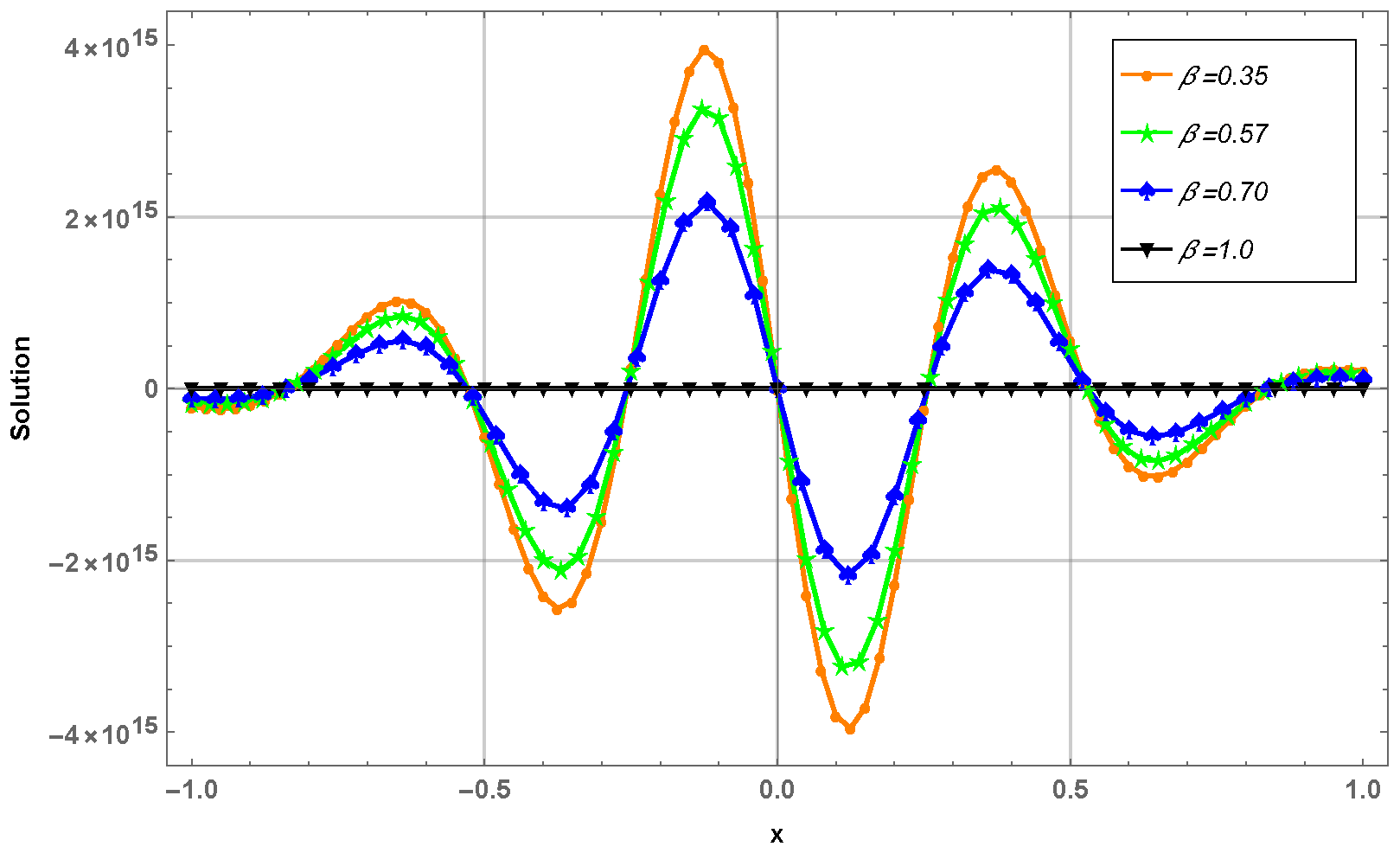
values on surface waves for fixed
= 3 is shown in 2D form in
Figure 3. Analysis reveals that the behaviour of escalation of a wave is similar to that of Example 2.
Table 7,
Table 8 and
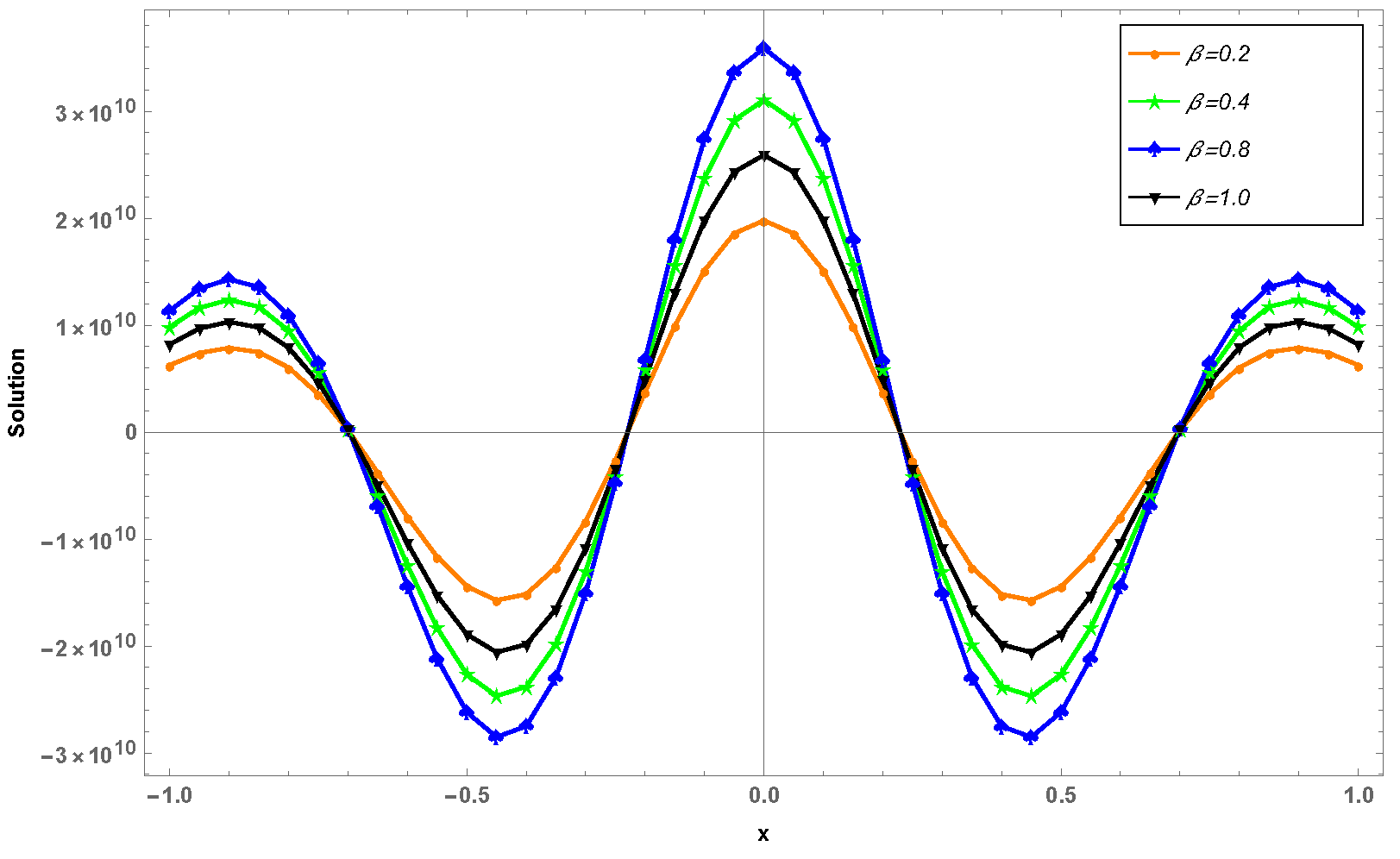
Table 9 provide a comparison of LHPM errors with the optical optimal homotopy asymptotic method (OHAM) errors of the Kaup–Kupershmidt equation (Example 4) for
= 0.5, 0.75, and 1, respectively. Observation showed that LHPM is more reliable than OHAM. A 3D solution graph and error graph of the Kaup–Kupershmidt equation can be seen in
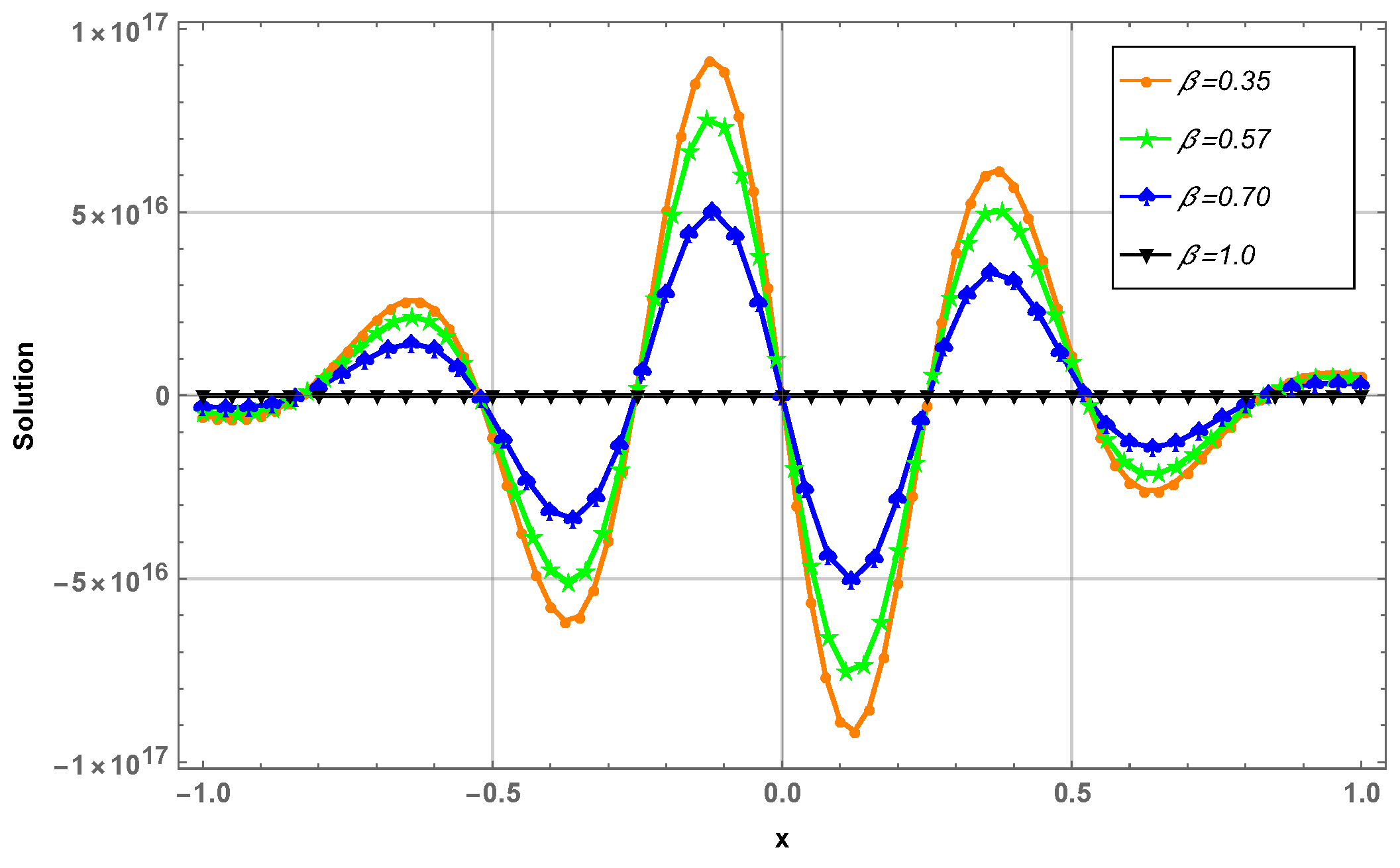
Figure 10. For different
values, surface waves level in a 2D form for
= 3 is displayed in
Figure 11 which depicts a sinusoidal cycle between
= −0.3 and 0.3. Moreover, wave level is declining at a greater value of
.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}