Autonomous Elbow Controller for Differential Drive In-Pipe Robots


Abstract
:1. Introduction
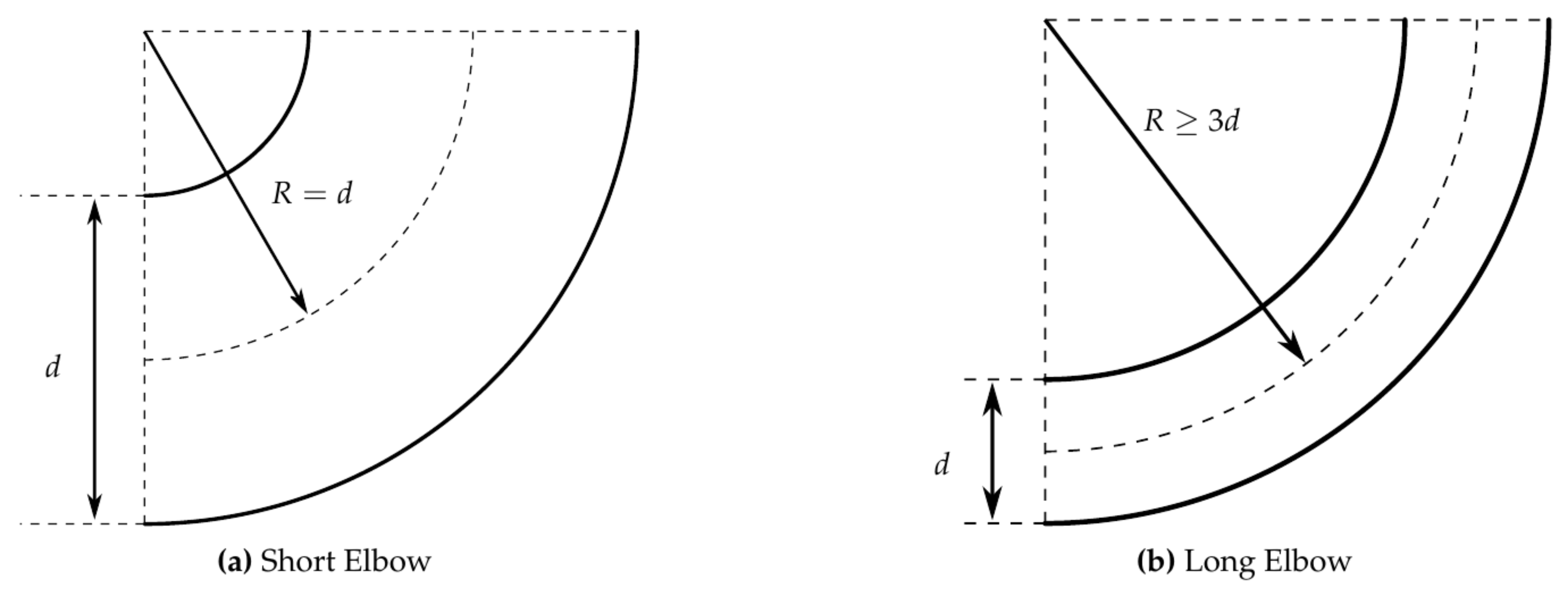
1.1. Pipework
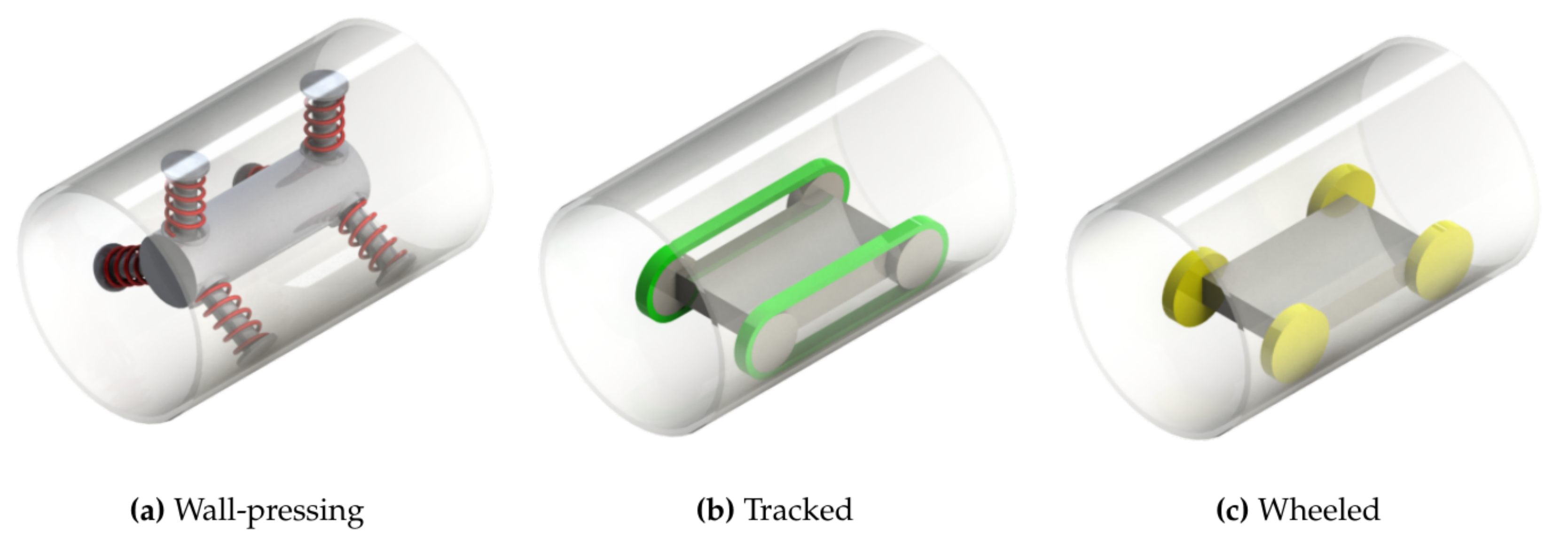
1.2. Pipe Inspection Robots
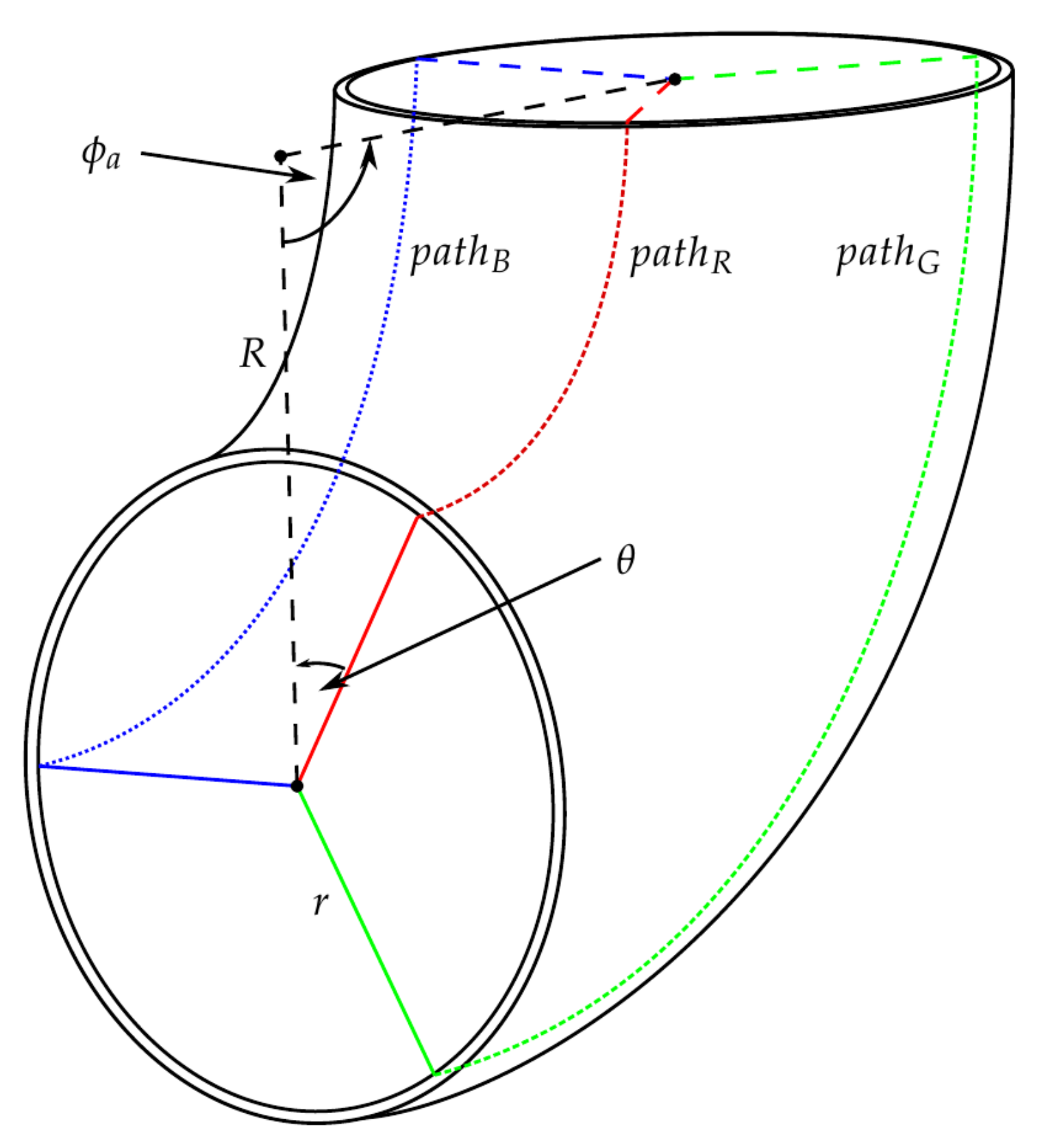
1.3. Control of Elbows
1.4. Paper Overview
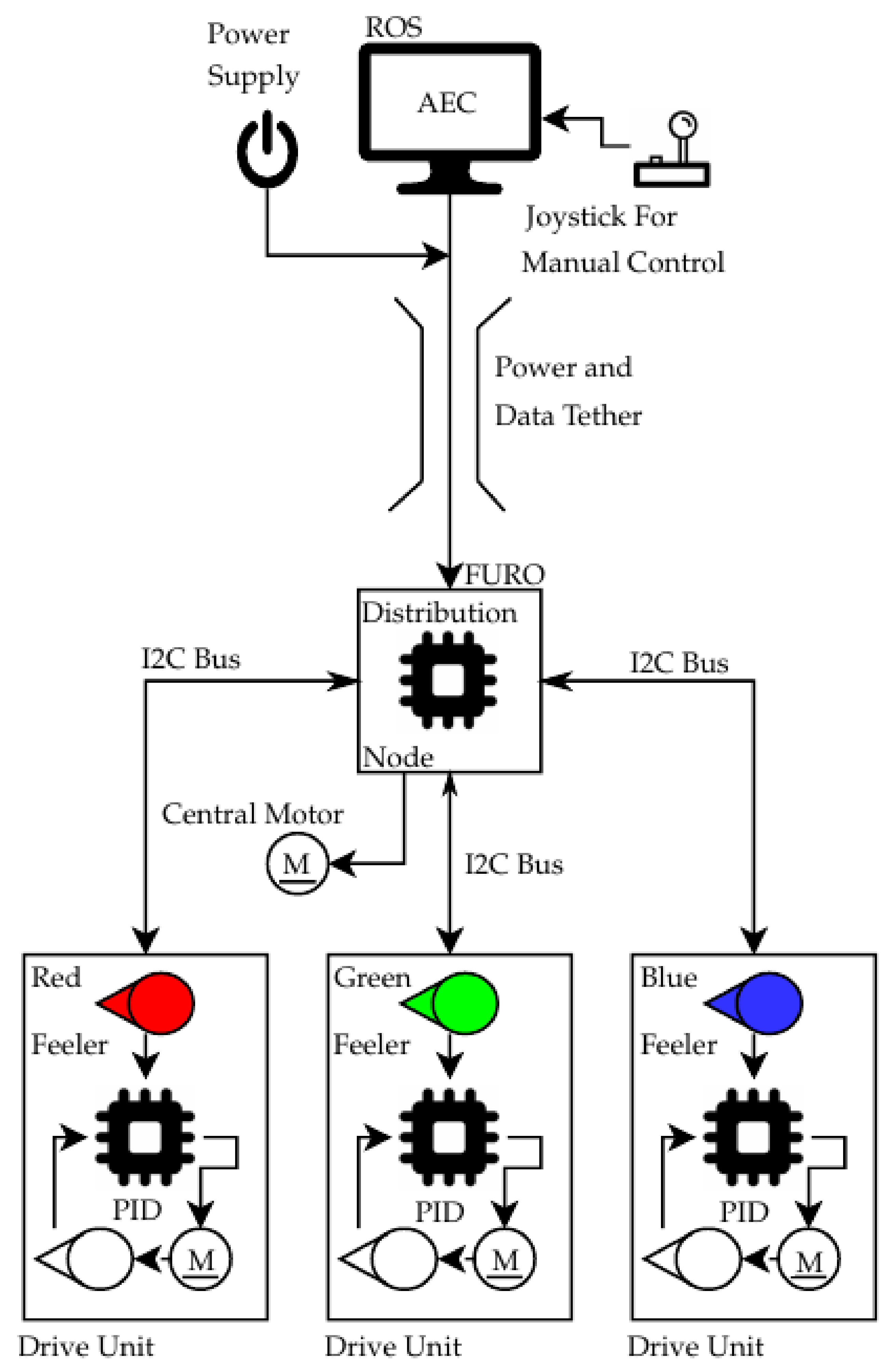
2. Hardware
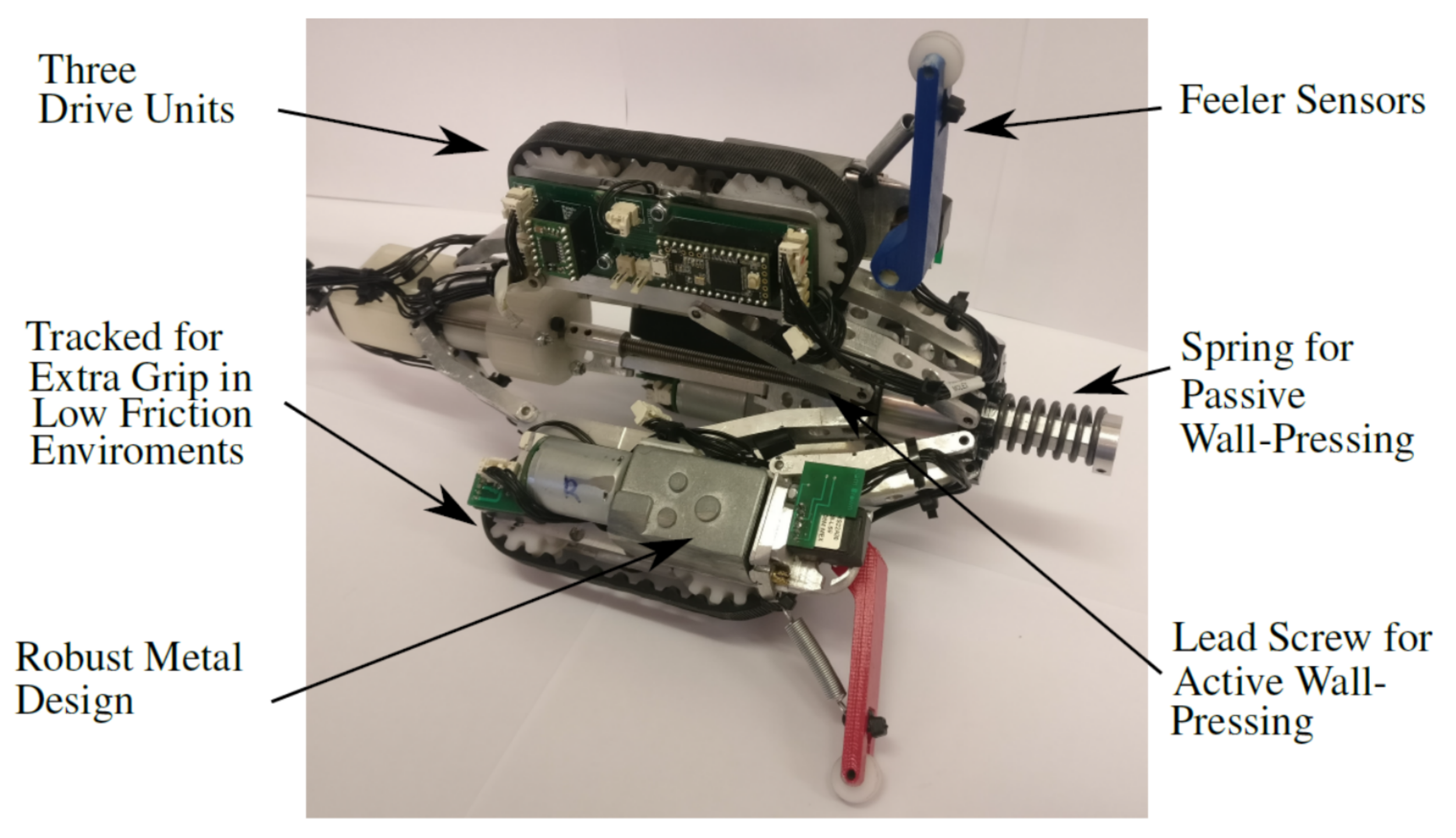
- FURO II:
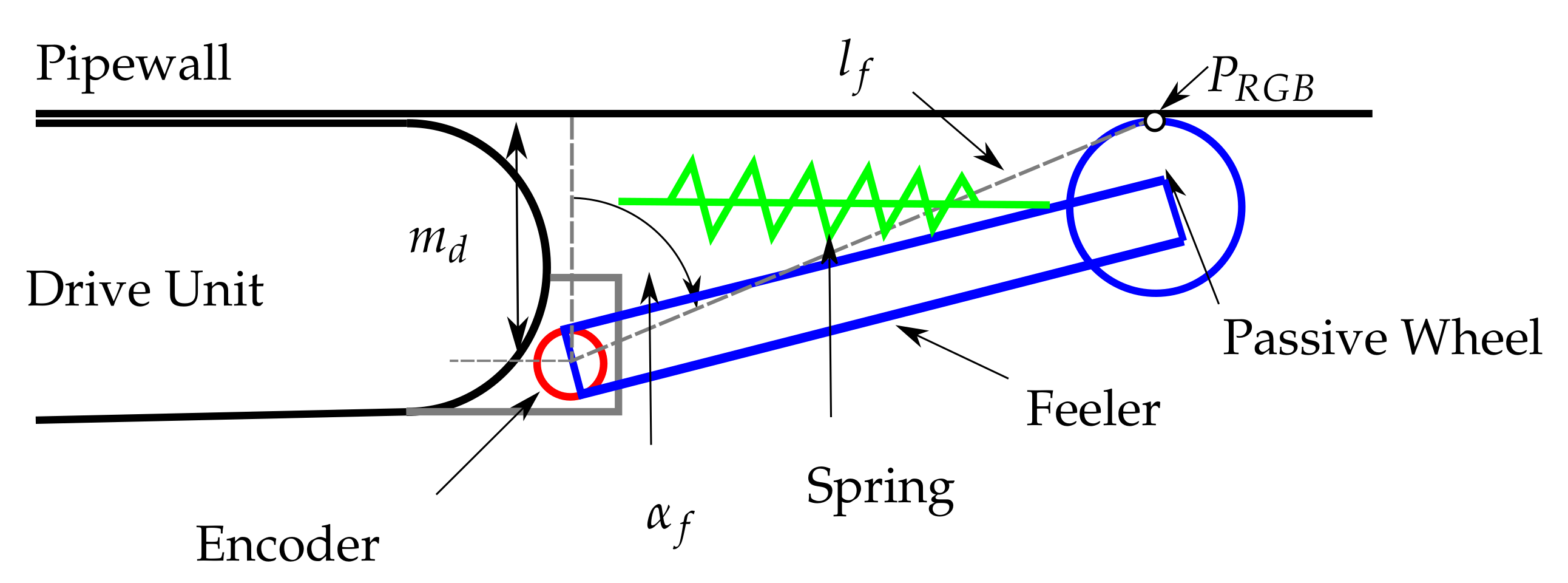
- Feeler Sensor:
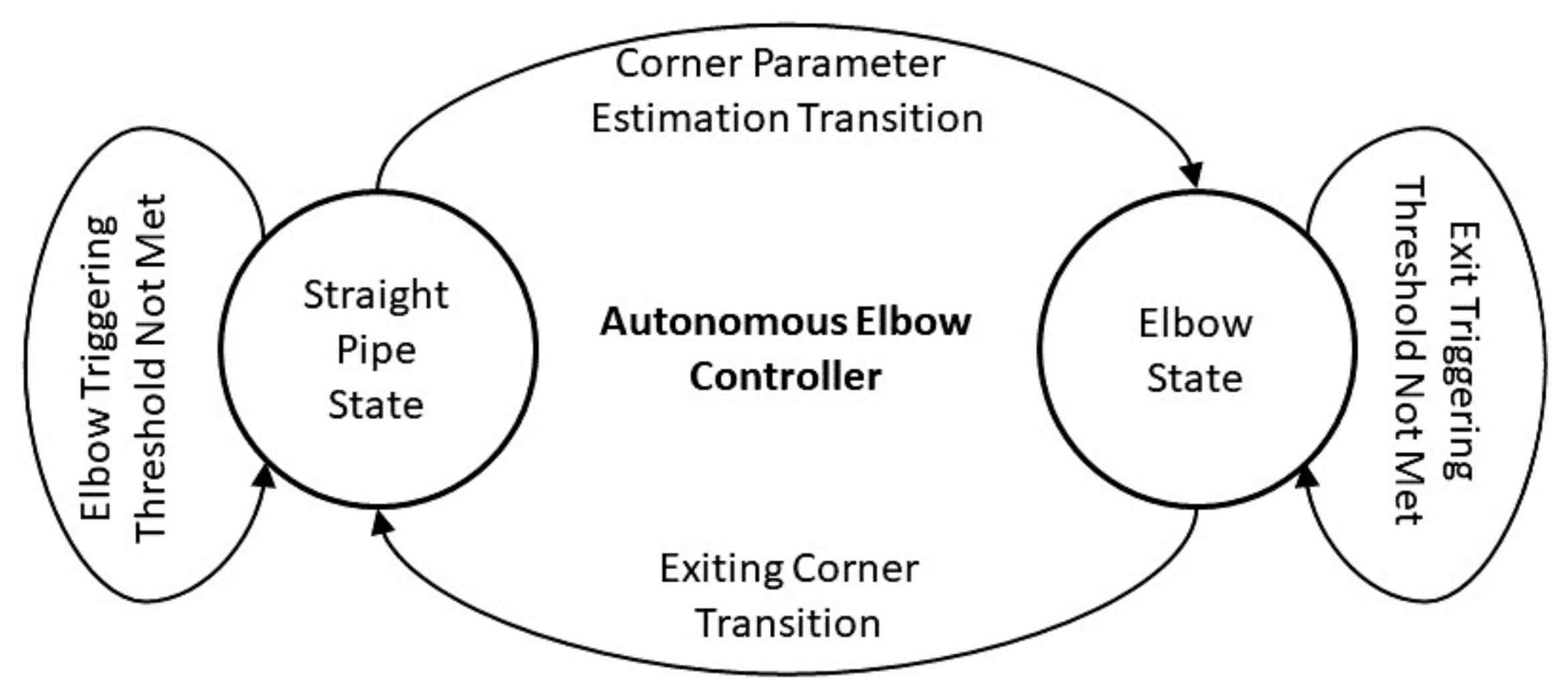
3. Autonomous Control Strategy
3.1. Straight Pipe State
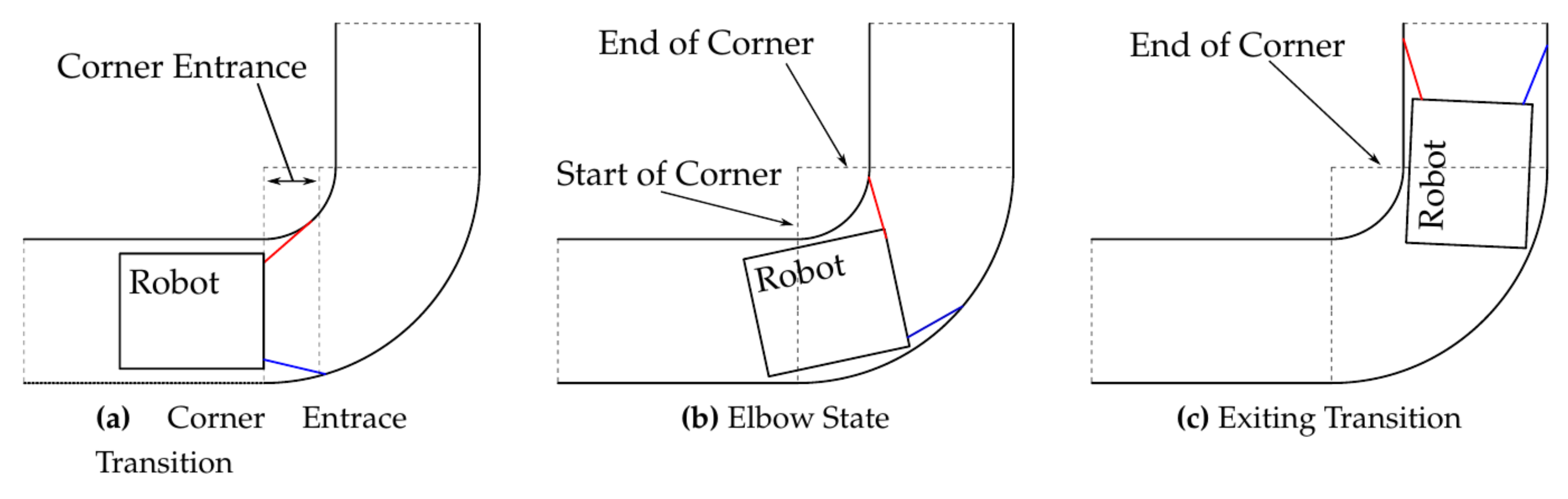
3.2. Corner Parameter Estimation Transition
3.3. Elbow State
3.4. Exiting Transition
4. Experimental Hardware and Methodology
4.1. Pipe Network
4.2. Experimental Procedure
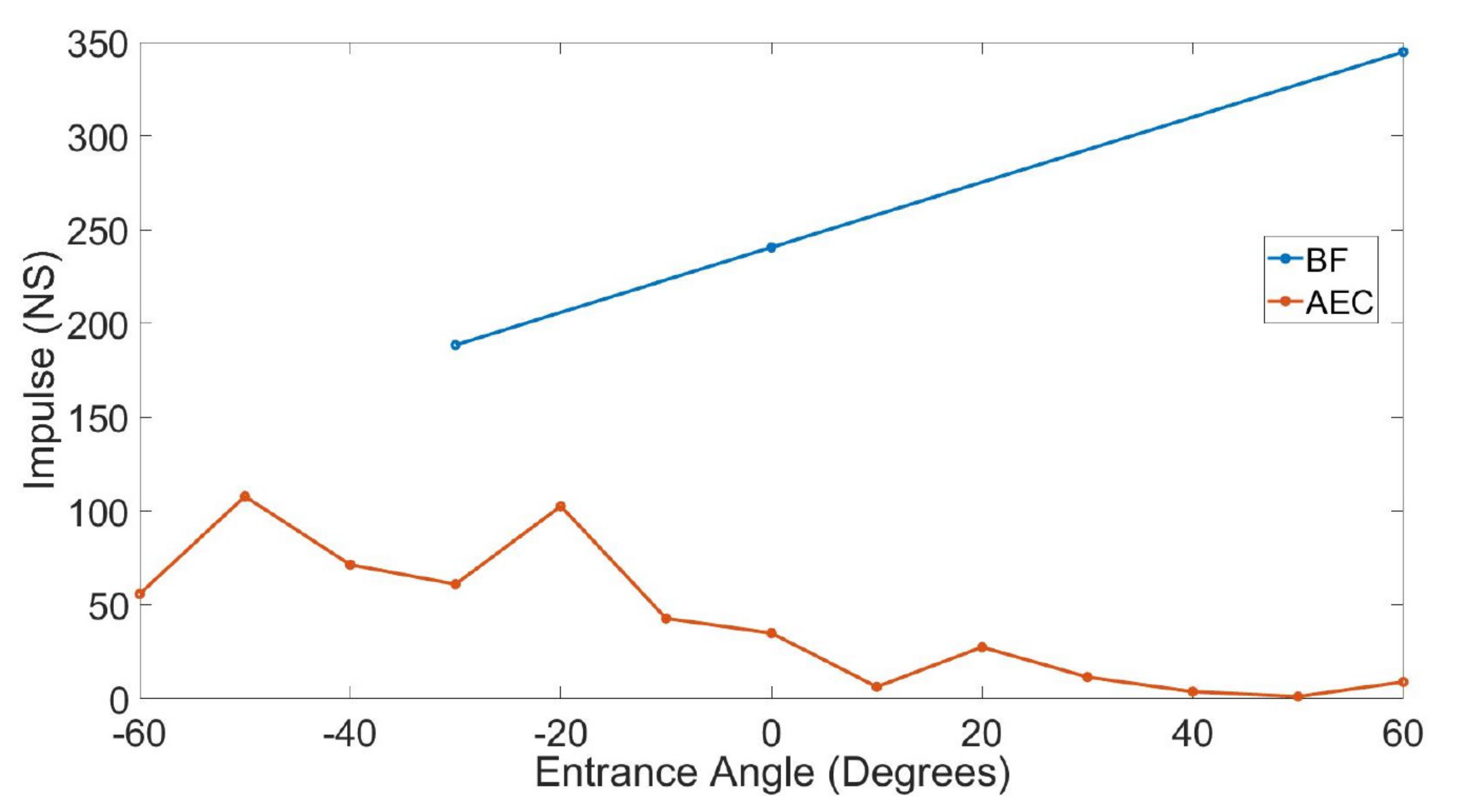
4.3. Comparison Metric: Impulse
5. Results and Discussion
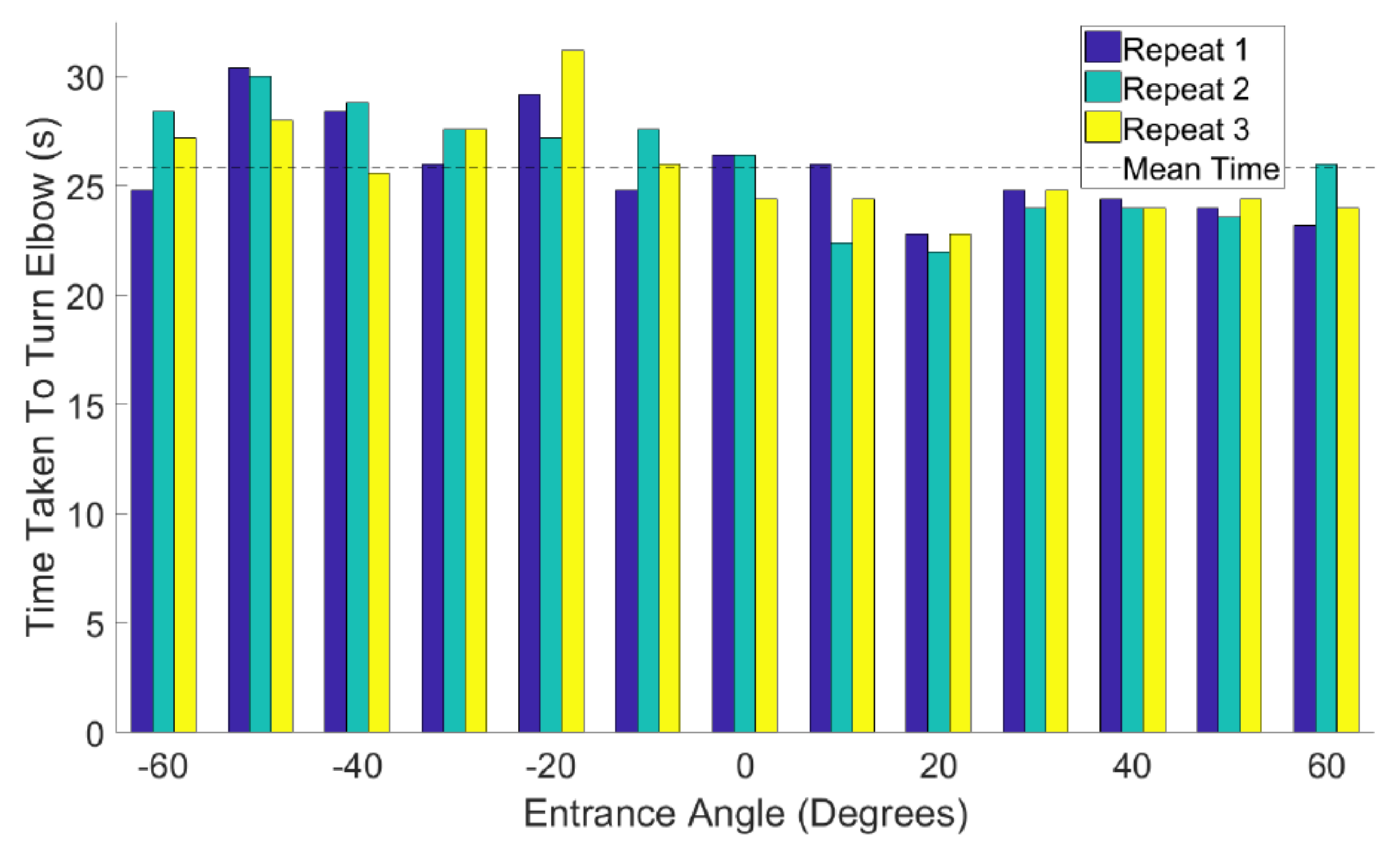
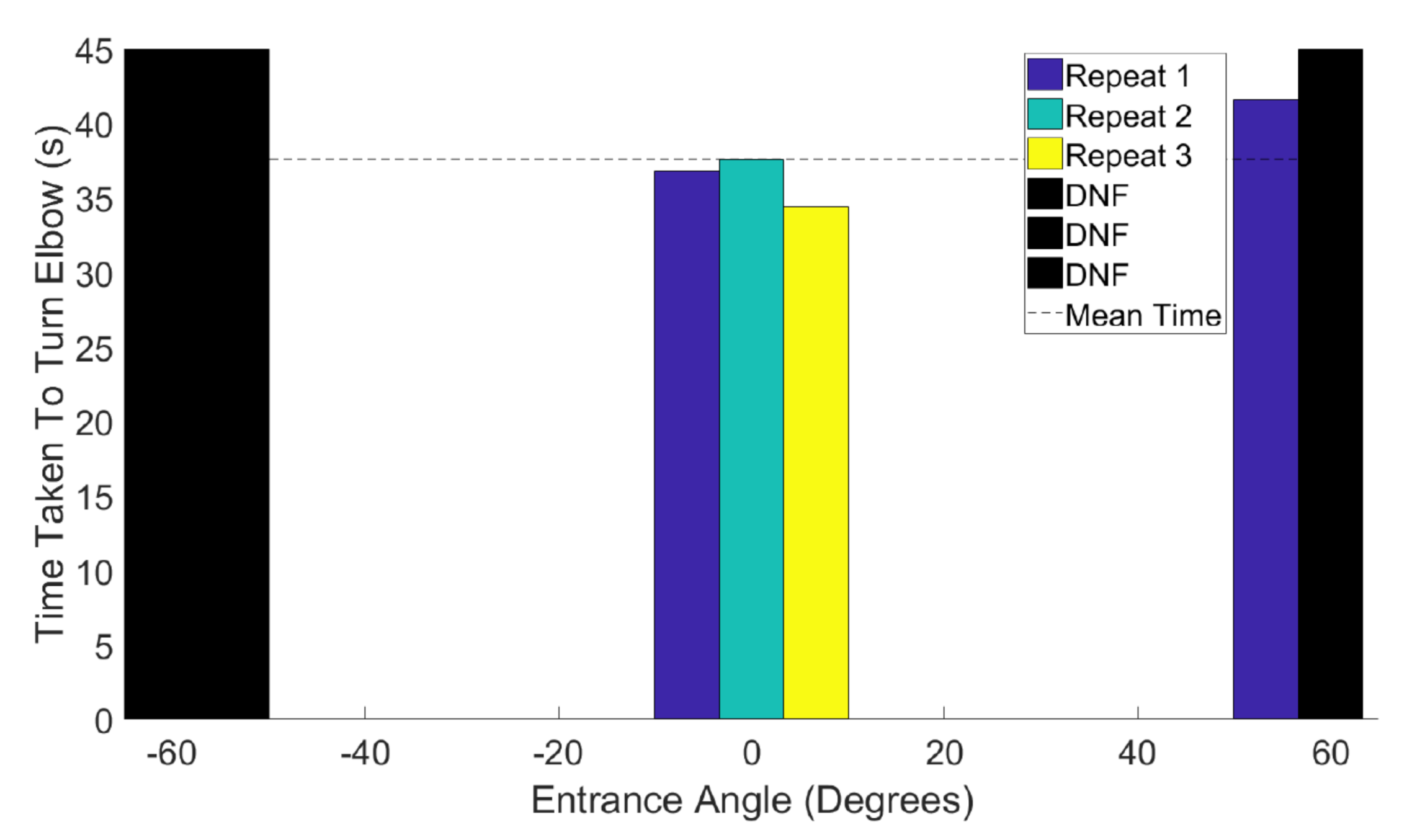
5.1. Experimental Results
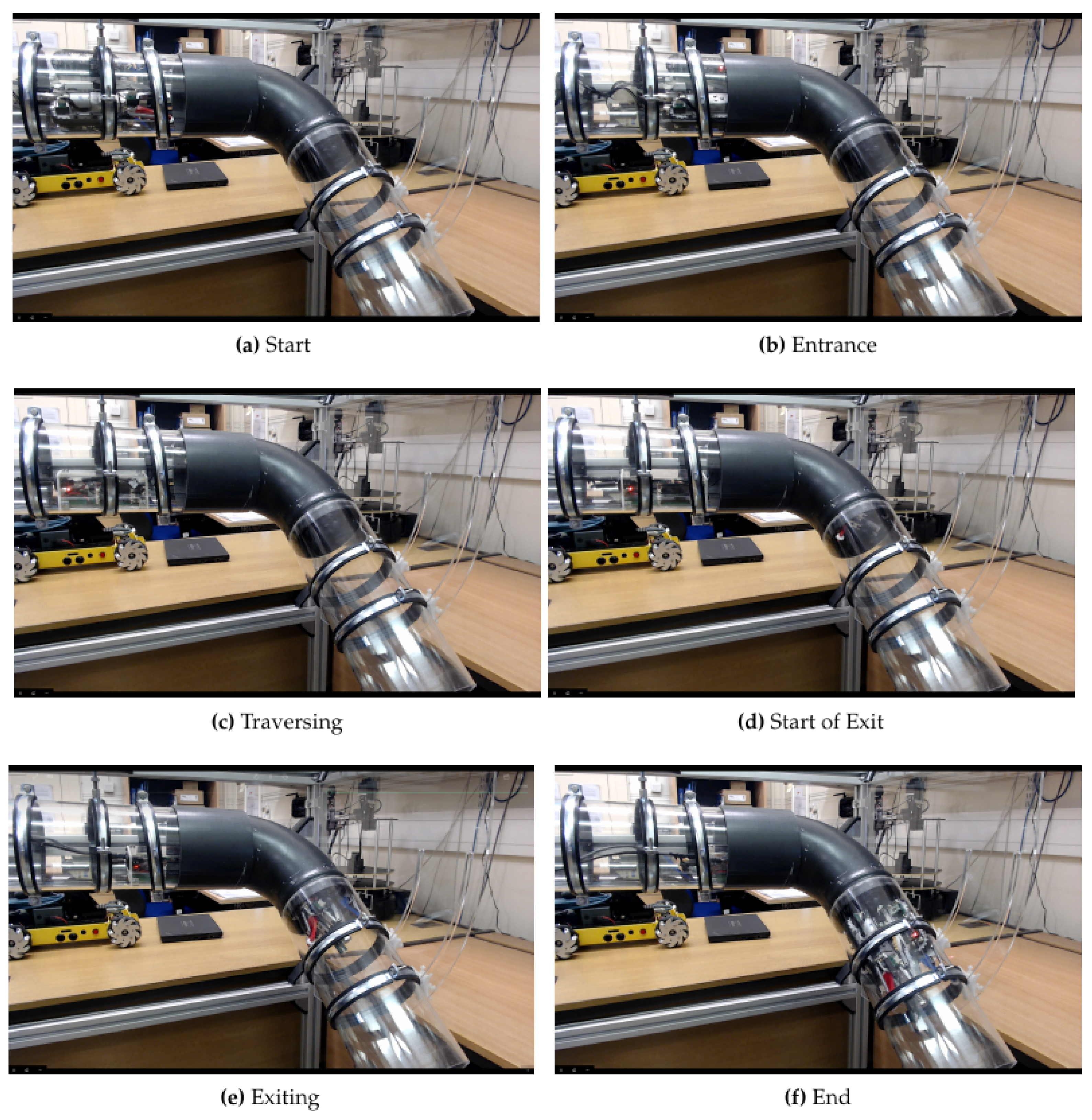
5.1.1. Entering
5.1.2. Traversing
5.1.3. Exiting
5.2. Discussion
5.2.1. Entrance
5.2.2. Traversing
5.2.3. Exit
5.3. Comparison with Literature
5.4. Scalability
5.5. Alternative Obstacles
5.5.1. Sharp Elbows and T-Junctions
5.5.2. Pipe Diameter Change
6. Summary and Contribution
Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Pipe Standards
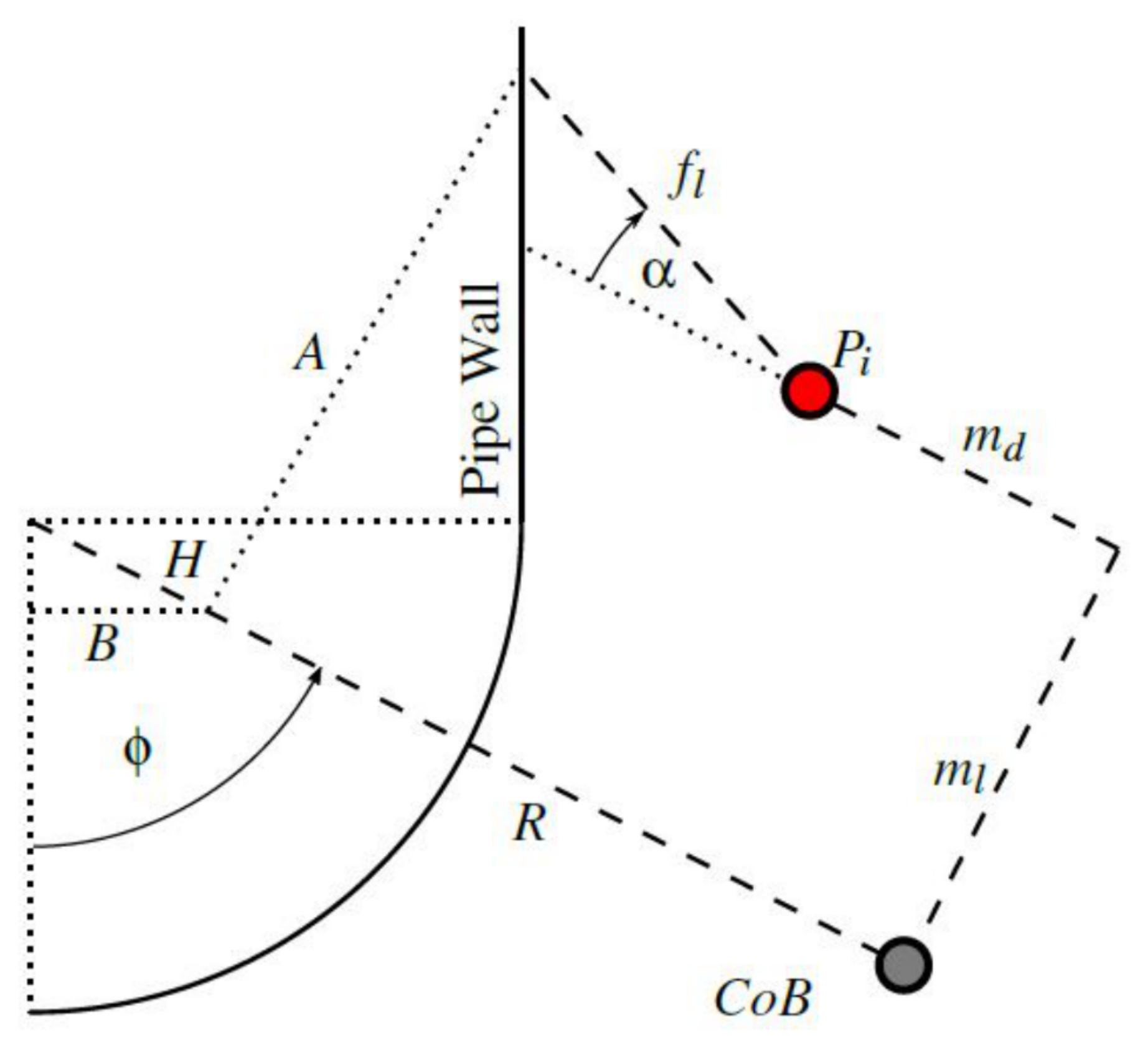
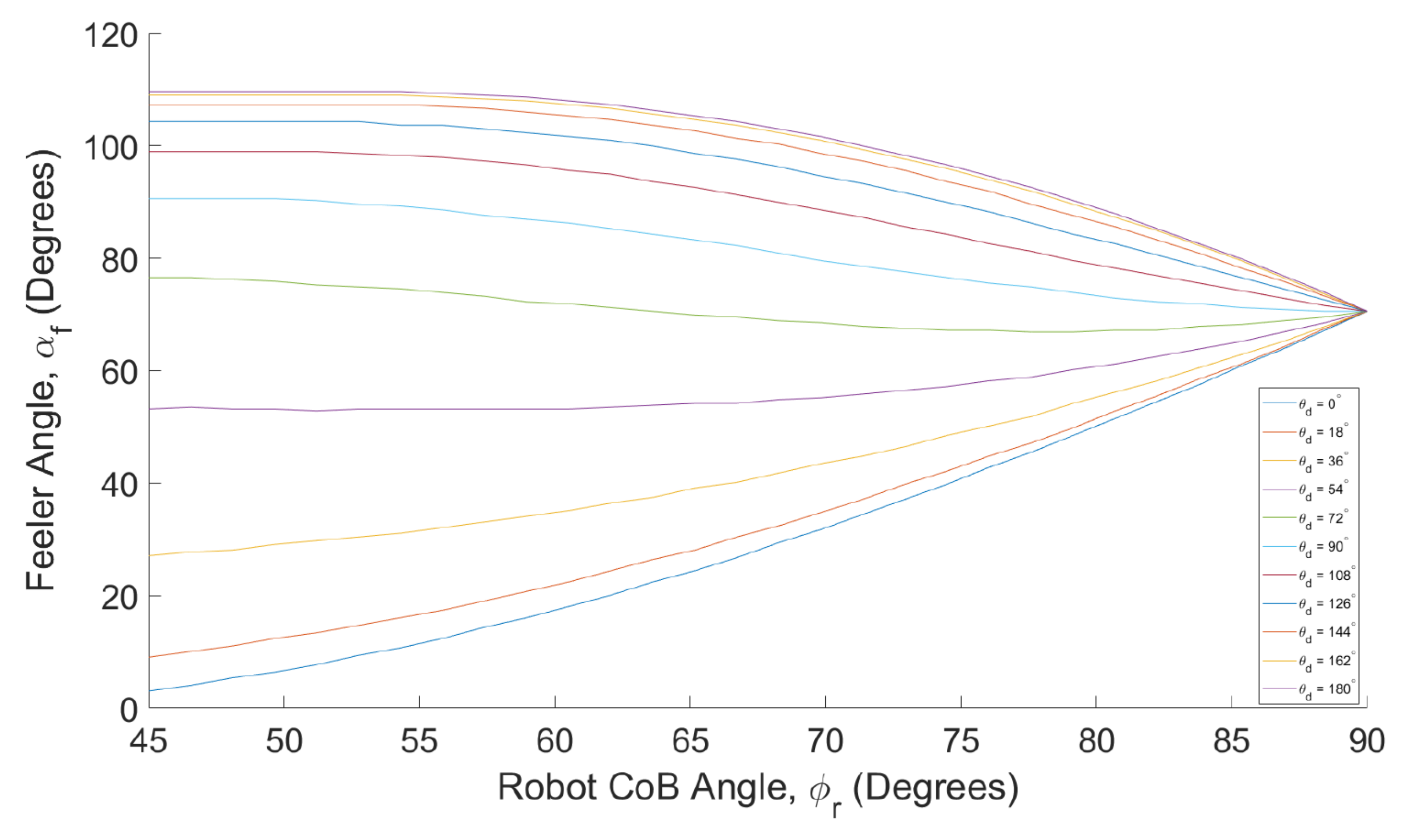
Feeler Angle Estimation Model


References
- Gov.uk. Nuclear Provision: The Cost of Cleaning Up Britain’s Historic Nuclear Sites-GOV.UK. Available online: https://www.gov.uk/government/publications/nuclear-provision-explaining-the-cost-of-cleaning-up-britains-nuclear-legacy/nuclear-provision-explaining-the-cost-of-cleaning-up-britains-nuclear-legacy (accessed on 9 January 2019).
- GameChangers. Post Operational Clean Out (POCO). Available online: https://www.gamechangers.technology/challenges/post-operational-clean-out-poco/ (accessed on 7 April 2020).
- Brown, L.; Carrasco, J.; Watson, S.; Lennox, B. Elbow Detection in Pipes for Autonomous Navigation of Inspection Robots. J. Intell. Robot. Syst. 2018, 1–15. [Google Scholar] [CrossRef] [Green Version]
- GameChangers. Identifying Unknown Sharps in Gloveboxes-Game Changers-Supporting Sellafield’s Nuclear Decommissioning Programme. Available online: https://www.gamechangers.technology/challenges/gloveboxes/ (accessed on 3 April 2020).
- EurekaMagazine. EurekaMagazine. The Vast Task of Decommissioning the UK’S Nuclear Facilities Is Driving and Rewarding Technological Innovation. Available online: https://www.eurekamagazine.co.uk/design-engineering-features/technology/the-vast-task-of-decommissioning-the-uks-nuclear-facilities-is-driving-and-rewarding-technological-innovation/182949/ (accessed on 11 September 2018).
- Roh, S.G.; Choi, H.R. Differential-drive in-pipe robot for moving inside urban gas pipelines. IEEE Trans. Robot. 2005, 21, 1–17. [Google Scholar]
- Rollinson, D.; Choset, H. Pipe Network Locomotion with a Snake Robot. J. Field Robot. 2016, 33, 322–336. [Google Scholar] [CrossRef]
- Okada, T.; Sanemori, T. MOGRER: A vehicle study and realization for in-pipe inspection tasks. Robot. Autom. IEEE J. 1987, 3, 573–582. [Google Scholar] [CrossRef]
- Okada, T.; Kanade, T. A three-wheeled self-adjusting vehicle in a pipe, FERRET-1. Int. J. Robot. Res. 1987, 6, 60–75. [Google Scholar] [CrossRef]
- Kim, J.H. Sensor-Based Autonomous Pipeline Monitoring Robotic System. Ph.D. Thesis, Louisiana State University, Baton Rouge, LA, USA, 2011. [Google Scholar]
- Zainal Abidin, A.S.; Chie, S.C.; Zaini, M.H.; Mohd Pauzi, M.F.A.; Sadini, M.M.; Mohamaddan, S.; Jamali, A.; Muslimen, R.; Ashari, M.F.; Jamaludin, M.S. Development of In-Pipe Robot D300: Cornering Mechanism. MATEC Web Conf. 2017, 87, 02029. [Google Scholar] [CrossRef] [Green Version]
- Brown, L. Autonomous Navigation of Unknown Pipe Networks; Technical Report; The Unviersity of Manchester: Manchester, UK, 2019. [Google Scholar]
- Nagase, J.Y.; Fukunaga, F. Development of a novel crawler mechanism for pipe inspection. In Proceedings of the 2016 42nd Annual Conference of the IEEE Industrial Electronics Society (IECON), Florence, Italy, 23–26 October 2016; pp. 5873–5878. [Google Scholar] [CrossRef]
- Lee, Y.G.; Kim, H.M.; Choi, Y.S.; Jang, H.; Choi, H.R. Control strategy of in-pipe robot passing through elbow. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 442–443. [Google Scholar] [CrossRef]
- Li, Q.; Sun, Y.; Liu, H.; Zhang, M.; Meng, X. Development of an In-Pipe Robot with a Novel Differential Mechanism; Springer: Singapore, 2018; pp. 1079–1097. [Google Scholar] [CrossRef]
- Kim, H.M.; Choi, Y.S.; Lee, Y.G.; Choi, H.R. Novel Mechanism for In-Pipe Robot Based on a Multiaxial Differential Gear Mechanism. IEEE/ASME Trans. Mechatron. 2017, 22, 227–235. [Google Scholar] [CrossRef]
- Zhang, Z.; Meng, G.; Sun, P. Kinematic modeling and simulation of wheeled pipe robot in elbow at planar motion stage. In Proceedings of the 2017 2nd Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Wuhan, China, 16–19 June 2017; pp. 227–233. [Google Scholar] [CrossRef]
- Chen, J.; Cao, X.; Deng, Z. Kinematic analysis of pipe robot in elbow based on virtual prototype technology. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 2229–2234. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, X. Stable motion analysis and verification of a radial adjustable pipeline robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1023–1028. [Google Scholar]
- Lee, J.S.; Roh, S.G.; Moon, H.; Choi, H.R. In-pipe robot navigation based on the landmark recognition system using shadow images. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’09, Kobe, Japan, 12–17 May 2009; pp. 1857–1862. [Google Scholar]
- Lee, C.H.; Joo, D.; Kim, G.H.; Kim, B.S.; Lee, G.H.; Lee, S.G. Elbow detection for localization of a mobile robot inside pipeline using laser pointers. In Proceedings of the 2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence, URAI 2013, Jeju, Korea, 30 October–2 November 2013; pp. 71–75. [Google Scholar] [CrossRef]
- Quigley, M.; Faust, J.; Foote, T.; Leibs, J. ROS: An Open-Source Robot Operating System. Available online: willowgarage.com (accessed on 10 May 2018).
- Choi, Y.S.; Kim, H.M.; Mun, H.M.; Lee, Y.G.; Choi, H.R. Recognition of pipeline geometry by using monocular camera and PSD sensors. Intell. Serv. Robot. 2017, 10, 213–227. [Google Scholar] [CrossRef]
- Kim, S.H.; Lee, S.J.; Kim, S.W. Weaving Laser Vision System for Navigation of Mobile Robots in Pipeline Structures. IEEE Sens. J. 2018. [Google Scholar] [CrossRef]
- Health and Safety Executive. Use of Pipeline Standards and Good Practice Guidance. Available online: https://www.hse.gov.uk/pipelines/resources/pipelinestandards.htm (accessed on 29 January 2021).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | Locomotion | Corning Method | |
|---|---|---|---|
| Nagase and Fukunaga | [13] | Tracked, WP | Compliant Design with BF |
| NIRVANA | [15] | Wheeled, WP | Multi-axis gear |
| MRINSPECT VII | [16] | Wheeled, WP | Multi-axis gear |
| Lee et al. | [14] | Wheeled, WP | Double Actuated Joint with BF |
| FAMPER | [10] | Tracked, WP | DD using Pre-determined map |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brown, L.; Carrasco, J.; Watson, S. Autonomous Elbow Controller for Differential Drive In-Pipe Robots. Robotics 2021, 10, 28. https://doi.org/10.3390/robotics10010028
Brown L, Carrasco J, Watson S. Autonomous Elbow Controller for Differential Drive In-Pipe Robots. Robotics. 2021; 10(1):28. https://doi.org/10.3390/robotics10010028
Chicago/Turabian StyleBrown, Liam, Joaquin Carrasco, and Simon Watson. 2021. "Autonomous Elbow Controller for Differential Drive In-Pipe Robots" Robotics 10, no. 1: 28. https://doi.org/10.3390/robotics10010028
APA StyleBrown, L., Carrasco, J., & Watson, S. (2021). Autonomous Elbow Controller for Differential Drive In-Pipe Robots. Robotics, 10(1), 28. https://doi.org/10.3390/robotics10010028