
A Laser-Based Direct Cable Length Measurement Sensor for CDPRs


Abstract
:1. Introduction
- -
- Cable properties (elasticity, creep, hysteresis, cable wear, ...);
- -
- Mechanical components: CDPR-frame, platform, pulleys, drive trains (manufacturing accuracy, mechanical play, motor/encoder resolution, stiffness, friction, ...);
- -
- Winch properties (cable flattening, coiling errors, non-linear cable length to drive ratio, ...);
- -
- Accuracy of the calibration;
- -
- Geometric and kinematic models used in the controller (cable sagging caused by cable mass, pulley kinematic, deflection due to external forces, ...).
2. Approach: Direct Cable Length Measurement Sensor
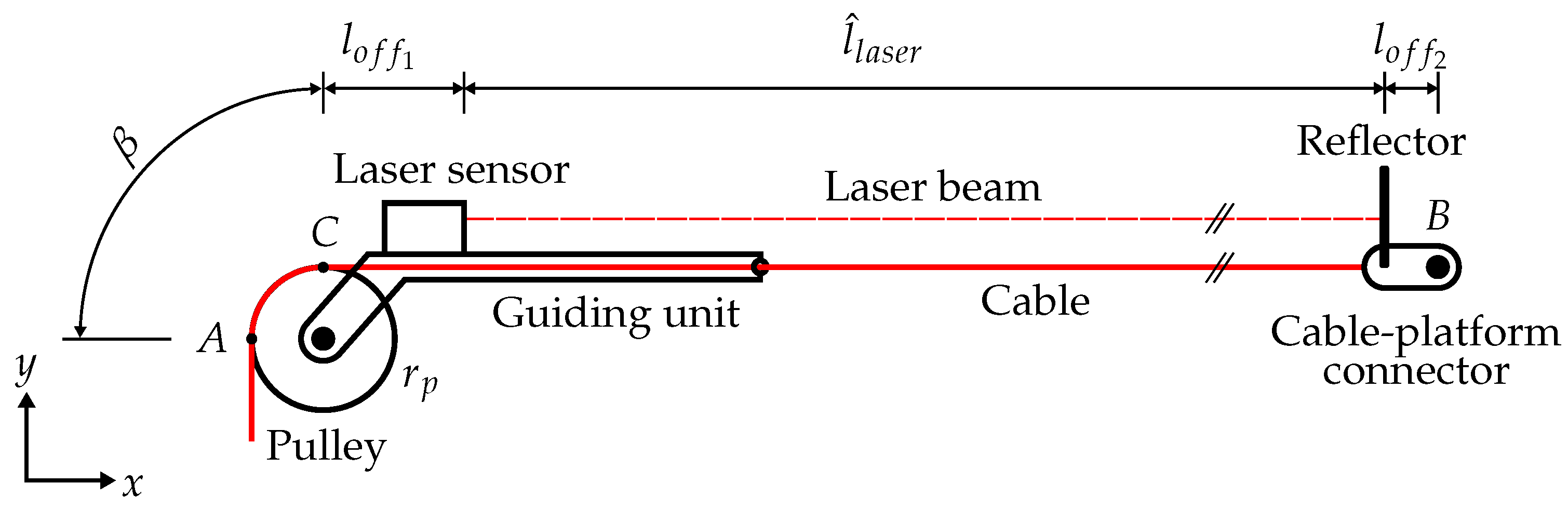
2.1. Kinematic of the DCLM-Sensor
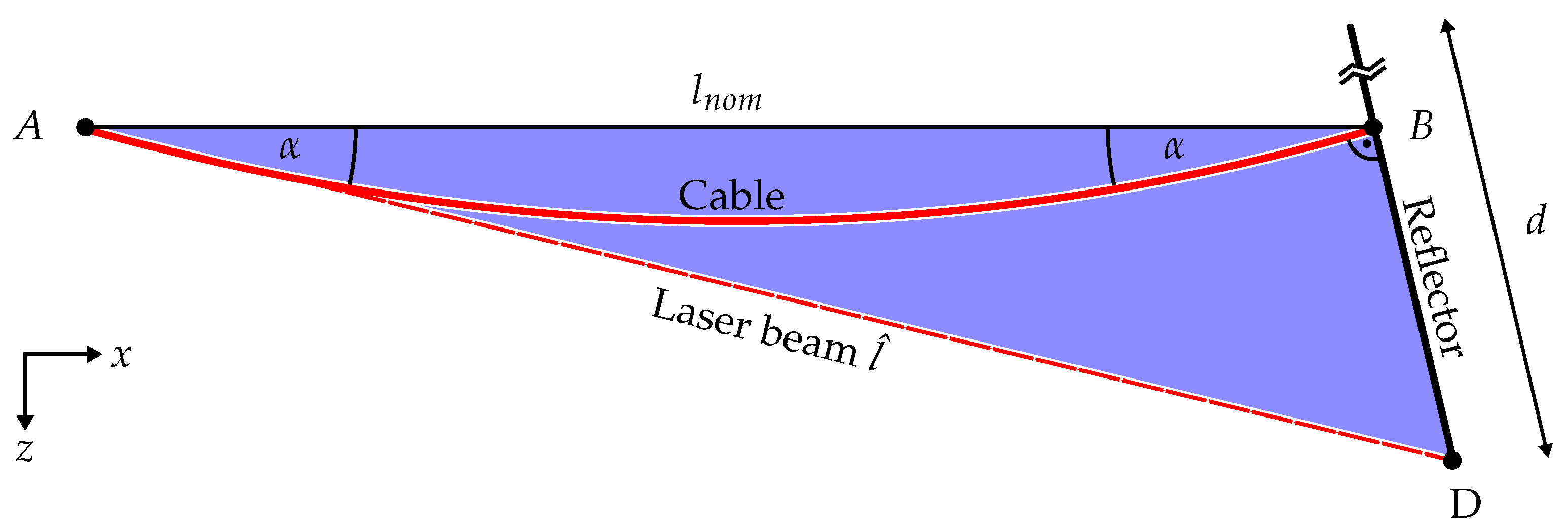
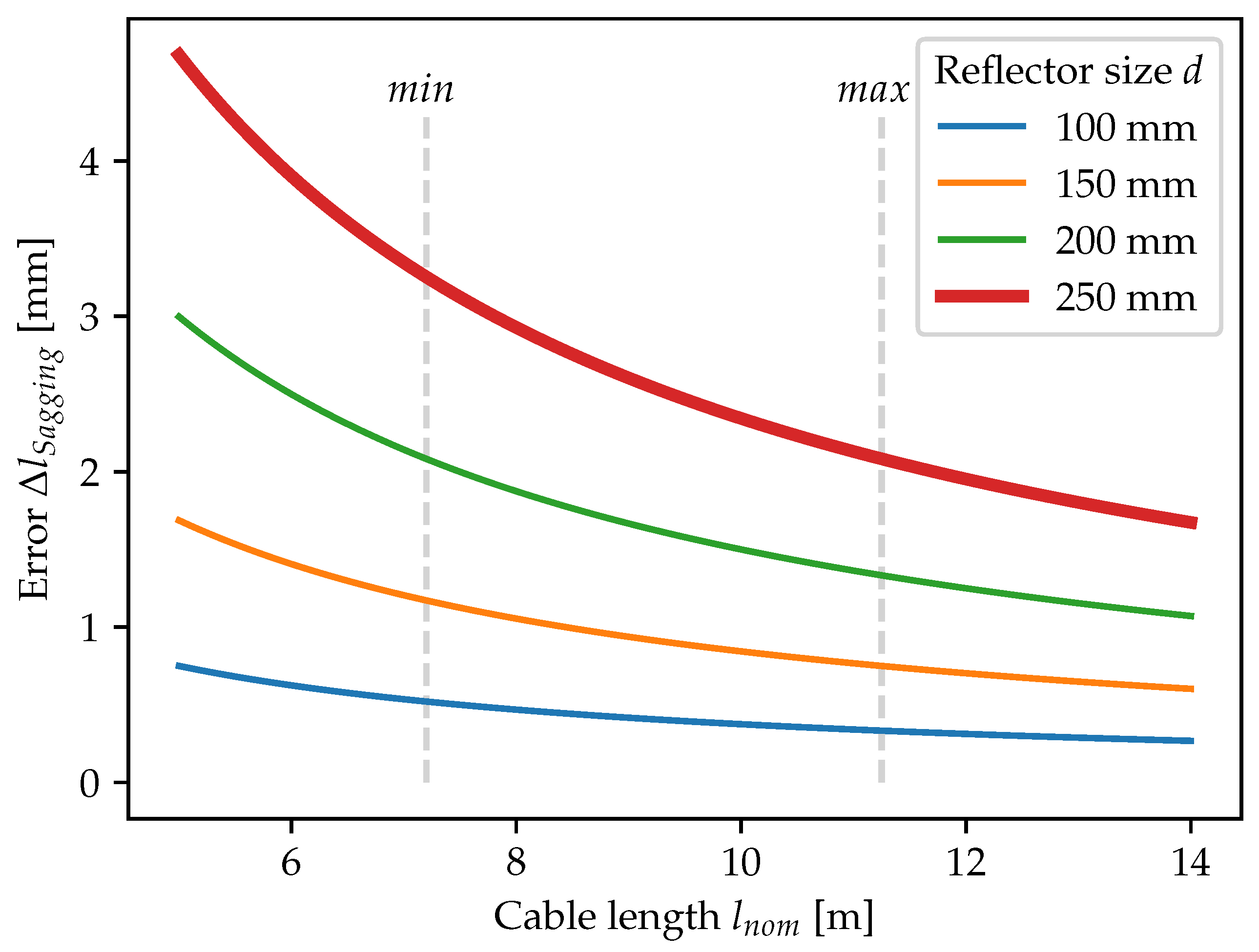
2.2. Measurement Error Due to Cable Sagging
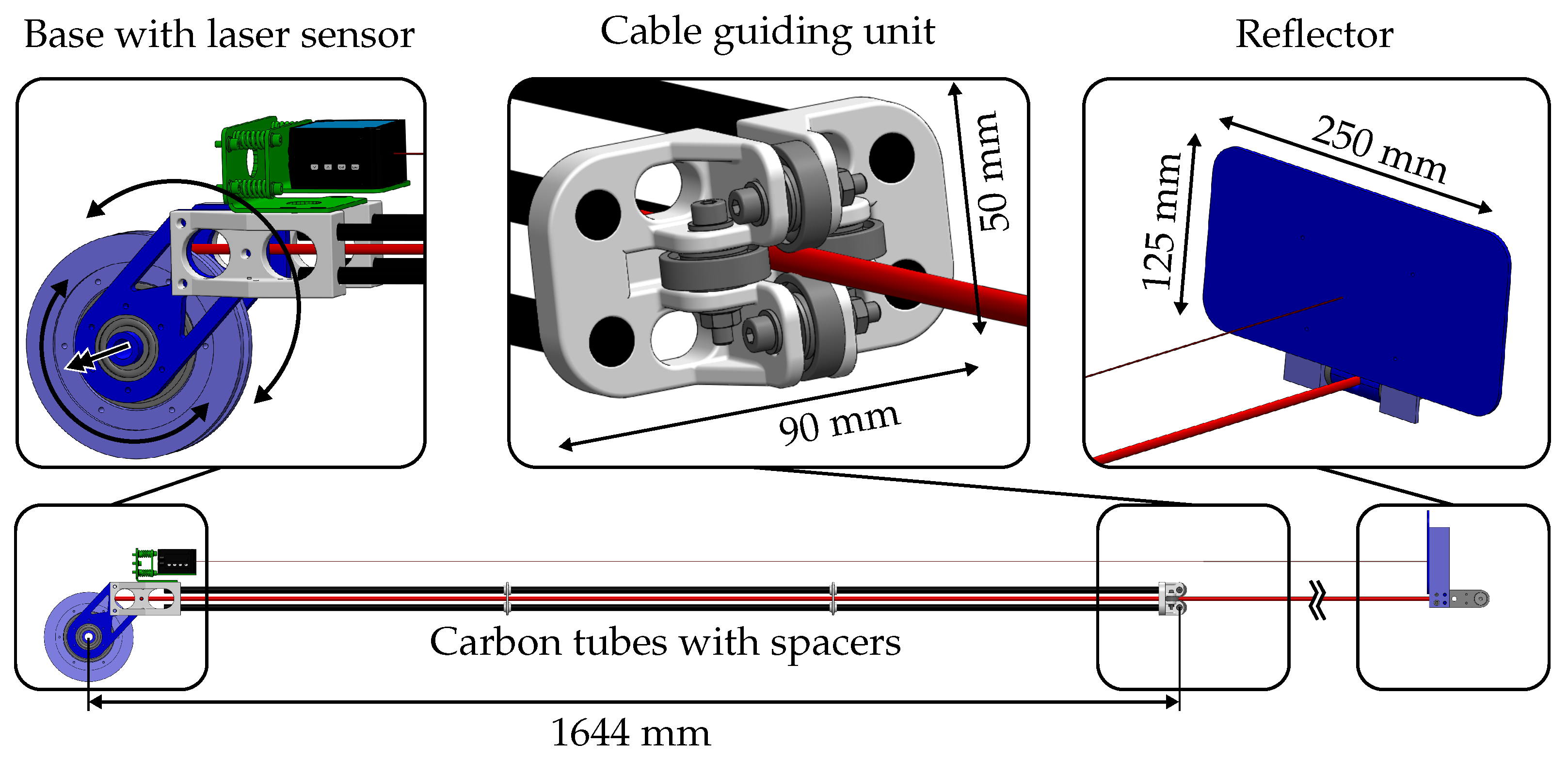
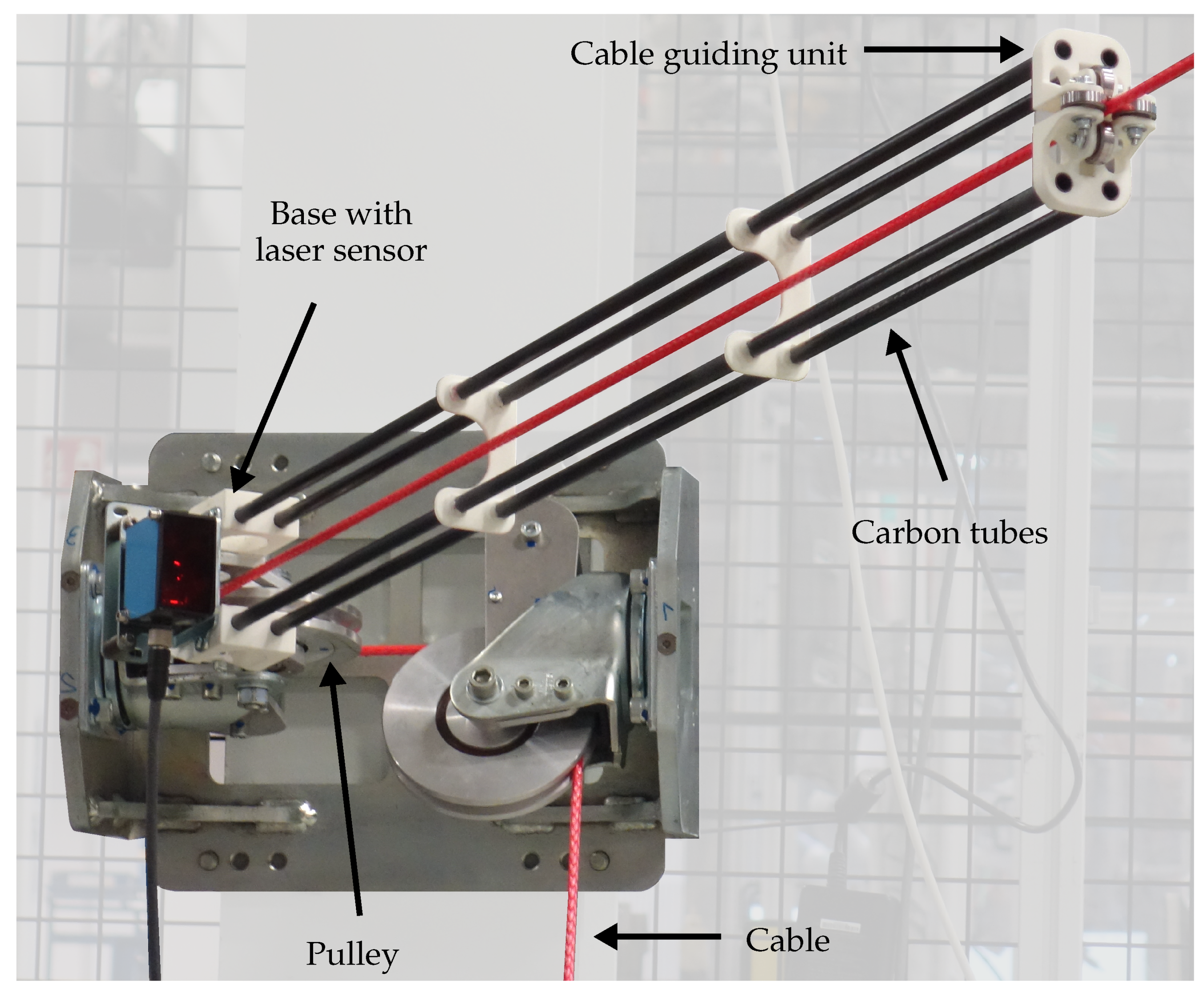
2.3. Mechanical Design
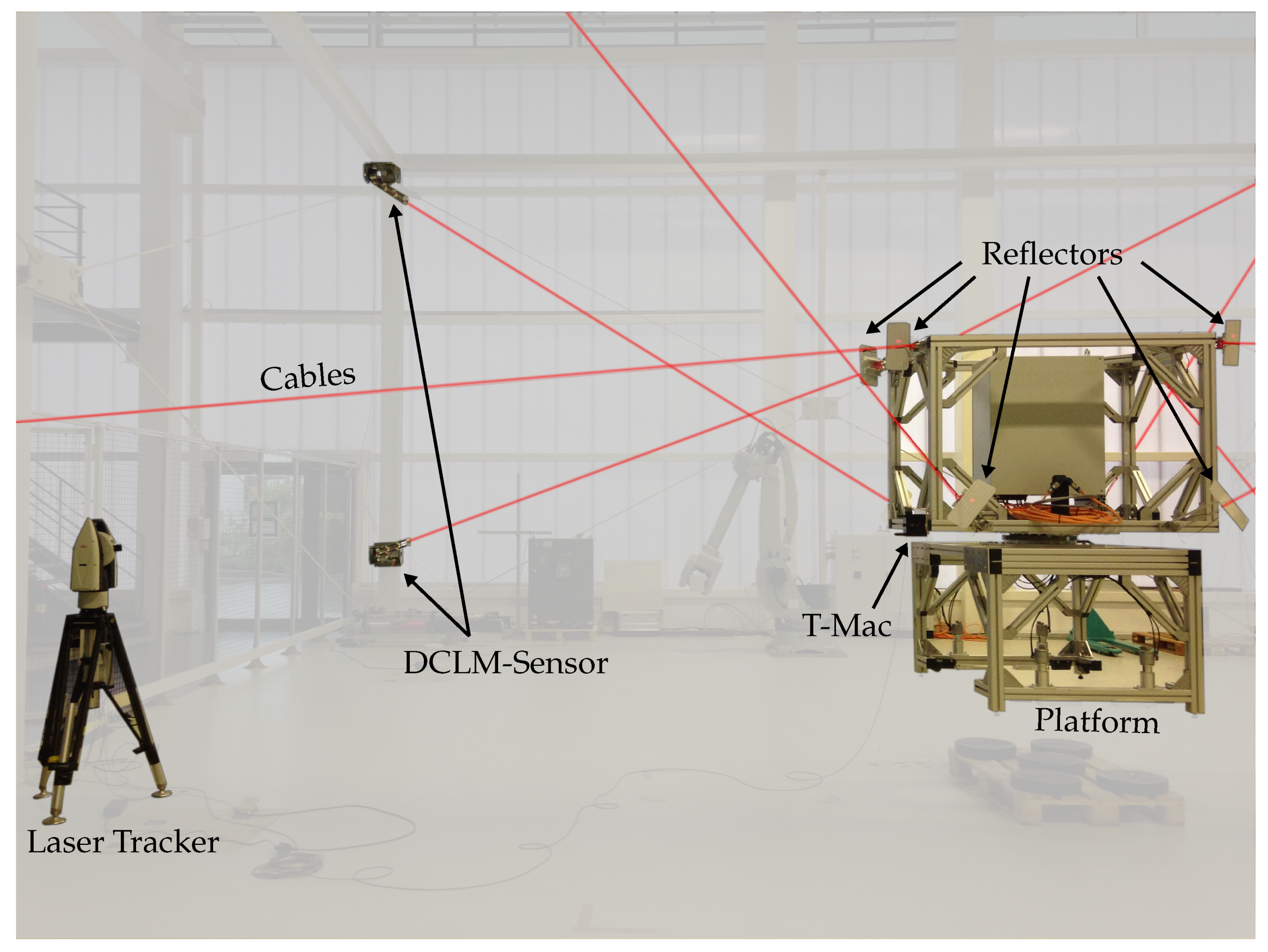
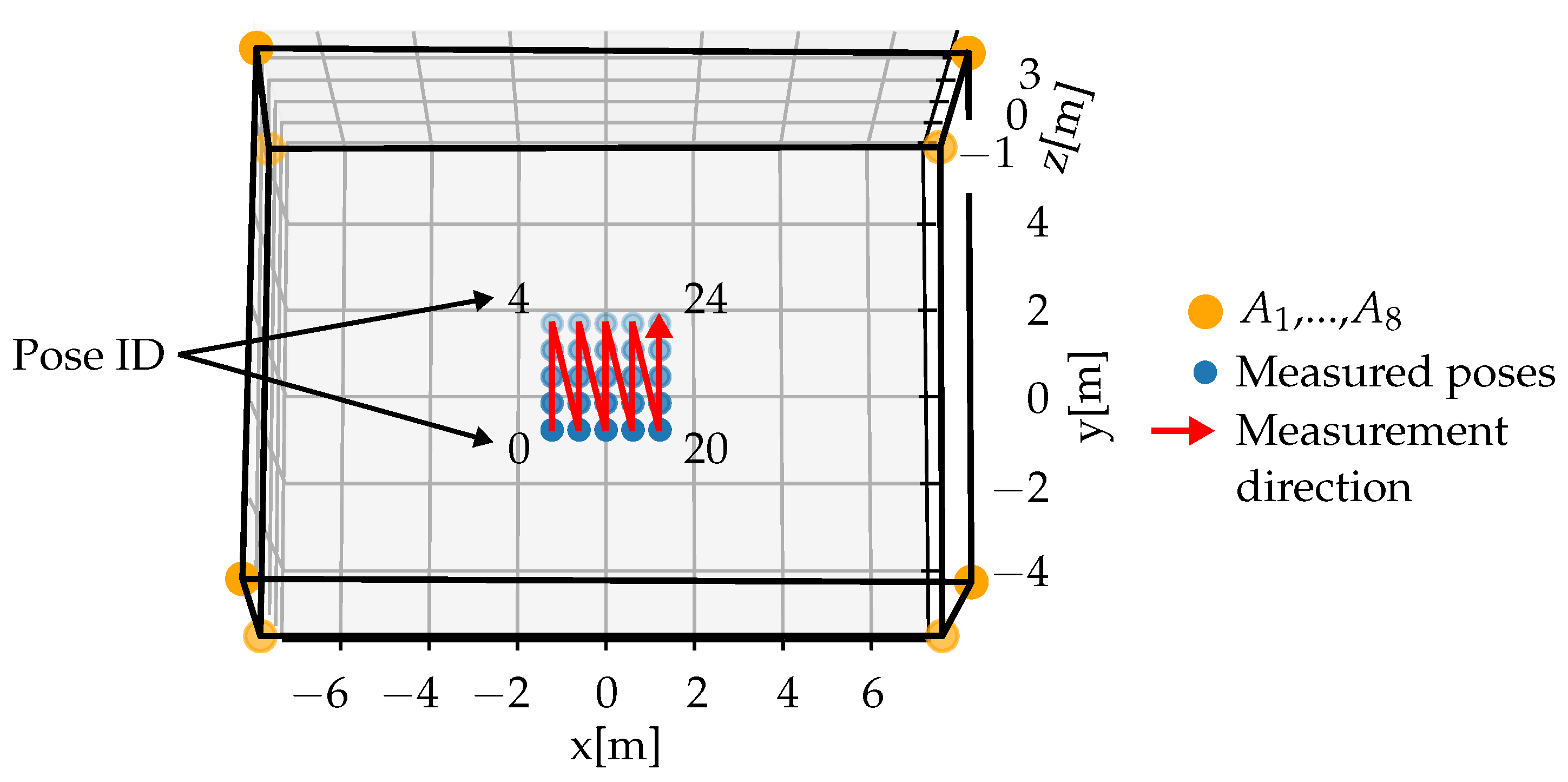
3. Experimental Accuracy Evaluation
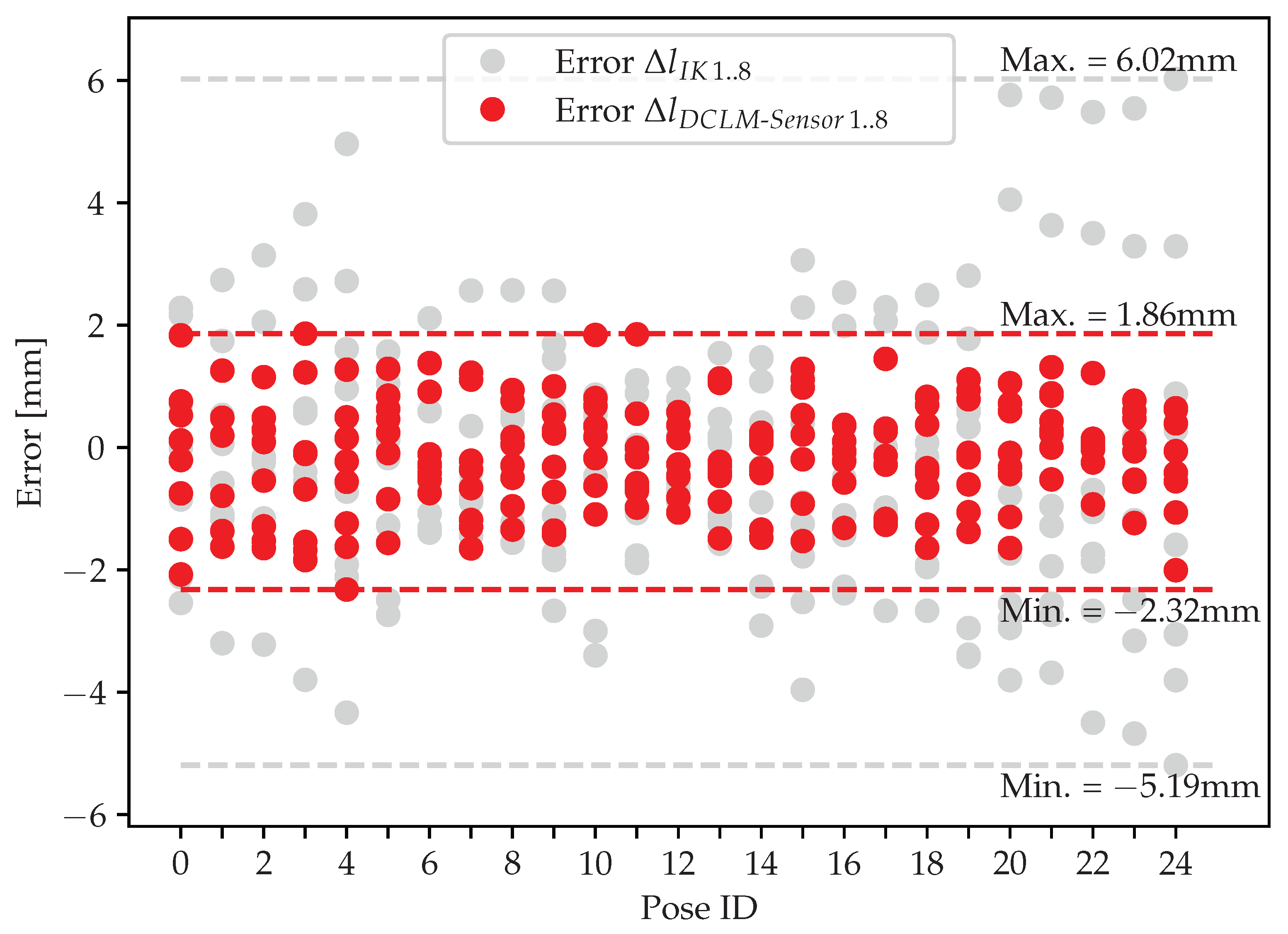
3.1. Accuracy Results of the DCLM-Sensor
3.2. Discussion of the Experimental Evaluation
- -
- The measurement accuracy of the laser sensor;
- -
- Misalignment of cable and laser due to cable sagging.
4. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
References
- Dallej, T.; Gouttefarde, M.; Andreff, N.; Hervé, P.E.; Martinet, P. Modeling and vision-based control of large-dimension cable-driven parallel robots using a multiple-camera setup. Mechatronics 2019, 61, 20–36. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, V.; Pott, A. Increase of Position Accuracy for Cable-Driven Parallel Robots Using a Model for Elongation of Plastic Fiber Ropes. In New Trends in Mechanism and Machine Science; Wenger, P., Flores, P., Eds.; Springer: Cham, Switzerland, 2017; Volume 43, pp. 335–343. [Google Scholar]
- Merlet, J.-P. MARIONET, A Family of Modular Wire-Driven Parallel Robots. In Advances in Robot Kinematics (ARK); Lenarcic, J., Stanisic, M., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 53–61. [Google Scholar]
- Schmidt, V.L. Modeling Techniques and Reliable Real-Time Implementation of Kinematics for Cable-Driven Parallel Robots Using Polymer Fiber Cables; Fraunhofer Verlag: Stuttgart, Germany, 2017. [Google Scholar]
- Pott, A.; Mütherich, H.; Kraus, W.; Schmidt, V.; Miermeister, P.; Verl, A. IPAnema: A family of Cable-Driven Parallel Robots for Industrial Applications. In Cable-Driven Parallel Robots; Bruckmann, T., Pott, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 12, pp. 119–134. [Google Scholar]
- Lamaury, J.; Gouttefarde, M. Control of a Large Redundantly Actuated Cable-Suspended Parallel Robot. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4659–4664. [Google Scholar]
- Alexandre dit Sandretto, J.A.; Trombettoni, G.; Daney, D.; Chabert, G. Certified Calibration of a Cable-Driven Robot Using Interval Contractor Programming. In Computational Kinematics; Thomas, F., Perez Gracia, A., Eds.; Springer: Dordrecht, The Netherlands, 2014; Volume 15, pp. 209–217. [Google Scholar]
- Miermeister, P.; Pott, A. Auto Calibration Method for Cable-Driven Parallel Robots Using Force Sensors. In Latest Advances in Robot Kinematics; Lenarcic, J., Husty, M., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 269–276. [Google Scholar]
- Piao, J.; Jin, X.; Choi, E.; Park, J.O.; Kim, C.S.; Jung, J. A Polymer Cable Creep Modeling for a Cable-Driven Parallel Robot in a Heavy Payload Application. In Cable-Driven Parallel Robots; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Springer: Cham, Switzerland, 2018; Volume 53, pp. 62–72. [Google Scholar]
- Dallej, T.; Gouttefarde, M.; Andreff, N.; Michelin, M.; Martinet, P. Towards vision-based control of cable-driven parallel robots. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 2855–2860. [Google Scholar]
- Garant, X.; Campeau-Lecours, A.; Cardou, P.; Gosselin, C. Improving the Forward Kinematics of Cable-Driven Parallel Robots Through Cable Angle Sensors. In Cable-Driven Parallel Robots; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Springer: Cham, Switzerland, 2018; Volume 53, pp. 167–179. [Google Scholar]
- Merlet, J.-P. Direct Kinematics of CDPR with Extra Cable Orientation Sensors: The 2 and 3 Cables Case with Perfect Measurement and Ideal or Elastic Cables. In Cable-Driven Parallel Robots; Gosselin, C., Cardou, P., Bruckmann, T., Pott, A., Eds.; Springer: Cham, Switzerland, 2018; Volume 53, pp. 180–191. [Google Scholar]
- Merlet, J.-P.; Daney, D. A portable, modular parallel wire crane for rescue operations. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2834–2839. [Google Scholar]
- Merlet, J.-P. Improving cable length measurements for large CDPR using the Vernier principle. In Cable-Driven Parallel Robots; Pott, A., Bruckmann, T., Eds.; Springer: Cham, Switzerland, 2019; Volume 74, pp. 47–58. [Google Scholar]
- Pott, A. Cable-Driven Parallel Robots: Theory and Application; Springer: Cham, Switzerland, 2018; Volume 120. [Google Scholar]
- Pott, A. Influence of Pulley Kinematics on Cable-Driven Parallel Robots. In Latest Advances in Robot Kinematics; Lenarcic, J., Husty, M., Eds.; Springer: Dordrecht, The Netherlands, 2012; pp. 197–204. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Weight [g] | |
|---|---|---|
| Base with laser sensor (without pulley) | 1082 | 1325 |
| Carbon tubes with spacers | 148 | |
| Cable guiding unit | 95 | |
| Reflector (without cable-platform connector) | 325 |
| Measuring Range | 200 ... 50,000 mm (with Reflector Foil) |
| Typ. repeatability (1 ) | 0.25 mm (moving average set to slow) |
| Accuracy | Distance ≤ 4 m: ±5 mm; Distance > 4 m: ±3 mm |
| Output rate | 2.5 ms |
| Cable Index | Proximal Anchor Points | Distal Anchor Points | Pulley Radii |
|---|---|---|---|
| i | A [m] | B [m] | [m] |
| 1 | 0.057 | ||
| 2 | 0.057 | ||
| 3 | 0.057 | ||
| 4 | 0.057 | ||
| 5 | 0.057 | ||
| 6 | 0.057 | ||
| 7 | 0.057 | ||
| 8 | 0.057 |
| Position accuracy | ±15 µm + 6 / m |
| Typical rotation accuracy | ±0.01° |
| ID | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| x [m] | −1.2 | −1.2 | −1.2 | −1.2 | −1.2 | −0.6 | −0.6 | −0.6 | −0.6 | −0.6 | 0 | 0 | 0 |
| y [m] | −1.2 | −0.6 | 0 | 0.6 | 1.2 | −1.2 | −0.6 | 0 | 0.6 | 1.2 | −1.2 | −0.6 | 0 |
| ID | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | |
| x [m] | 0 | 0 | 0.6 | 0.6 | 0.6 | 0.6 | 0.6 | 1.2 | 1.2 | 1.2 | 1.2 | 1.2 | |
| y [m] | 0.6 | 1.2 | −1.2 | −0.6 | 0 | 0.6 | 1.2 | −1.2 | −0.6 | 0 | 0.6 | 1.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martin, C.; Fabritius, M.; Stoll, J.T.; Pott, A. A Laser-Based Direct Cable Length Measurement Sensor for CDPRs. Robotics 2021, 10, 60. https://doi.org/10.3390/robotics10020060
Martin C, Fabritius M, Stoll JT, Pott A. A Laser-Based Direct Cable Length Measurement Sensor for CDPRs. Robotics. 2021; 10(2):60. https://doi.org/10.3390/robotics10020060
Chicago/Turabian StyleMartin, Christoph, Marc Fabritius, Johannes T. Stoll, and Andreas Pott. 2021. "A Laser-Based Direct Cable Length Measurement Sensor for CDPRs" Robotics 10, no. 2: 60. https://doi.org/10.3390/robotics10020060
APA StyleMartin, C., Fabritius, M., Stoll, J. T., & Pott, A. (2021). A Laser-Based Direct Cable Length Measurement Sensor for CDPRs. Robotics, 10(2), 60. https://doi.org/10.3390/robotics10020060