
Validating Safety in Human–Robot Collaboration: Standards and New Perspectives

 ,
,  , ,
, ,  , ,
, ,  , , , ,
, , , ,
Abstract
:1. Introduction
1.1. Safety in HRC
1.2. Paper Contribution
2. Robot Safety: The Regulatory Framework
2.1. Overview

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Standard | HRC Relevance | Type | Harmonized |
|---|---|---|---|---|
| ISO 12100:2010 [26] | Safety of machinery—general principles for design—risk assessment and risk reduction | Risk assessment | A | Yes |
| ISO 13855:2010 [31] | Safety of machinery—positioning of safeguards with respect to the approach speeds of parts of the human body | Suitable for SSM | B | Yes |
| ISO 18497:2018 [32] | Agricultural machinery and tractors—safety of highly automated machinery | Safety requirements, verification | B | Yes |
| ISO 13851:2019 [33] | Safety of machinery—two-hand control devices—principles for design and selection | Suitable for HG | B | Yes |
| ISO 10218-1:2011 [28] | Robots and robotic devices—safety requirements for industrial robots—part 1: robots | HRC operation requirements | C | Yes |
| ISO 10218-2:2011 [29] | Robots and robotic devices—safety requirements for industrial robots—part 2: robot systems and integration | HRC operation requirements | C | Yes |
| ISO 13482:2014 [34] | Robots and robotic devices—safety requirements for personal care robots | Guidance for safety (lifecycle) | C | Yes |
| ISO 3691-4: 2020 [35] | Industrial trucks—safety requirements and verification—part 4: driverless industrial trucks and their systems | Human detection | C | Yes |
| IEC 80601-2-78: 2020 1 [36] | Medical electrical equipment—part 2-78: particular requirements for basic safety and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation | Safe HRI with RACA robots | n.a. | No |
| ISO/TS 15066:2016 [30] | Robots and robotic devices—collaborative robots | Focused on HRC | TS | n.a. |
| ISO/TR 23482-1:2020 [37] | Application of ISO 13482—part 1: safety-related test methods | Testing procedures for ISO 13482 | TR | n.a. |
| ISO/TR 20218-1:2018 [38] | Robotics—safety design for industrial robot systems—part 1: end-effectors | Requirements for end-effectors | TR | n.a |
| ISO/TR 20218-2:2017 [39] | Robotics—safety requirements for industrial robots—part 2: manual load/unload stations | Req. for load/unload stations | TR | n.a |
2.2. A New Trend in Standardization?
2.3. Analysis of the Gaps
3. Safety Skills and Testing Protocols in a Cross-Domain Perspective
3.1. The Skill-Based Approach
3.2. Protocols for Skill-Based Validation of Applications
- -
- increasing the familiarity in the robotics community with possible measuring techniques;
- -
- informing protocol users of what aspects of their risk analysis and system behavior are relevant for the validation.
- Protocol applicability conditions are general and valid in different scenarios. The main advantage of basing protocol development on a cross-domain perspective is the possibility of reducing their quantity, still meeting the specific needs of a wide variety of application cases.
- The assessed metrics can be based on measured values or on Boolean variables. This is mainly related to the required testing equipment, as in the case of video cameras, the observation of the test enables analysis only on a threshold-based assessment.
- Regardless of the test metrics, safety skills are validated based on the verification of the compliance with specific thresholds, which are provided by specific standards, or, if not available, determined by the manufacturer. None of the thresholds are proposed by protocol designers, in compliance with the protocol concept and aims.
- To maximize the usability of protocols and, consequently, further shorten the distances between the users and the safety validation, where possible, several kinds of testing equipment and methodologies are suggested.
- All the LIE validation protocols are based on the use of sensing devices with the same basic principle, which is acquiring normal force and pressure. Furthermore, they all can be characterized as “biofidel”, referring to the capability of reproducing the biomechanical behavior of the human body part potentially involved in the contact. This approach represents the state-of-the-art for the assessment of human–robot physical interaction, which is expected to be adopted by the relevant ISO standards. As shown in Section 2.2, this is indeed one of the new aspects introduced in the ISO/DIS 10218-2 [40] and a similar device is also envisaged by the ISO/TR 23482-1 [37].
4. Examples of Protocol Use and Application
- an experimental campaign, belonging to the in-house trials performed by the COVR partners, aimed at obtaining the maximum permissible velocities of a collaborative robot in some areas of the workspace;
- the validation of a mobile robot for a retail environment;
- the validation of a rehabilitation robotic device.
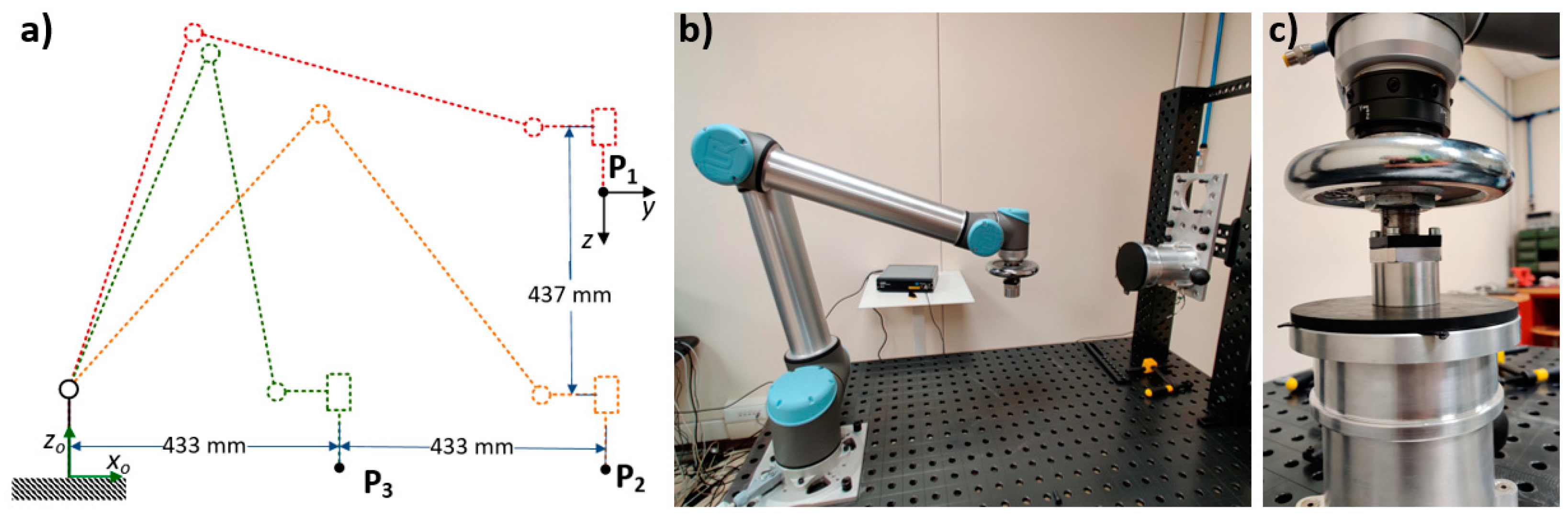
4.1. Admissible Velocities of a Robot Arm in a Shared Workspace
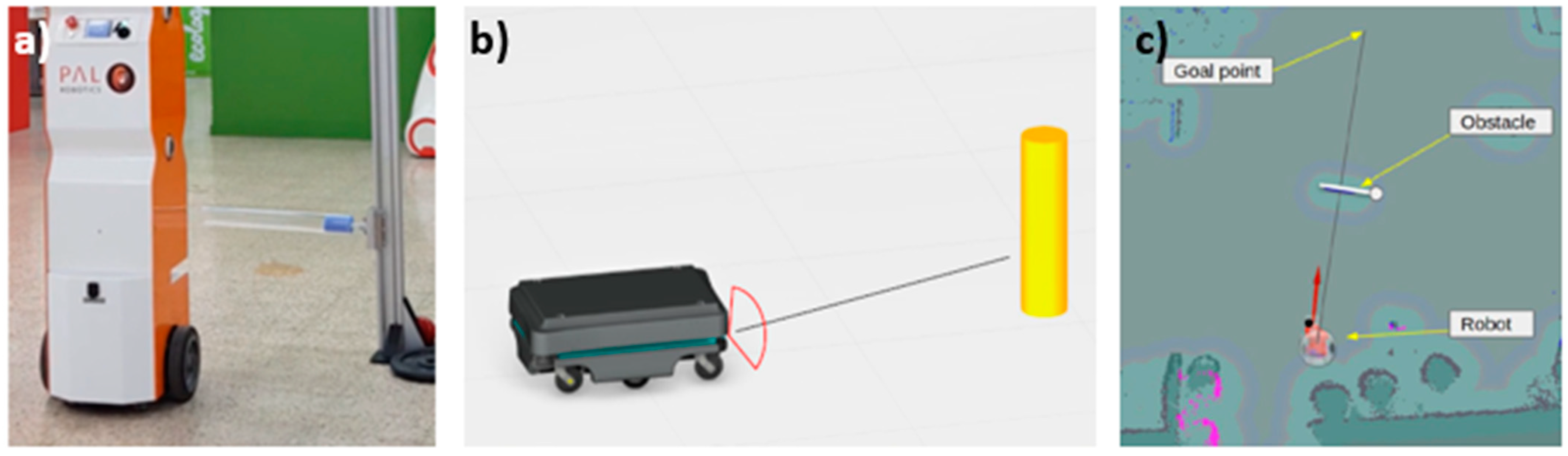
4.2. Stockbot: A Mobile Robot for a Retail Environment
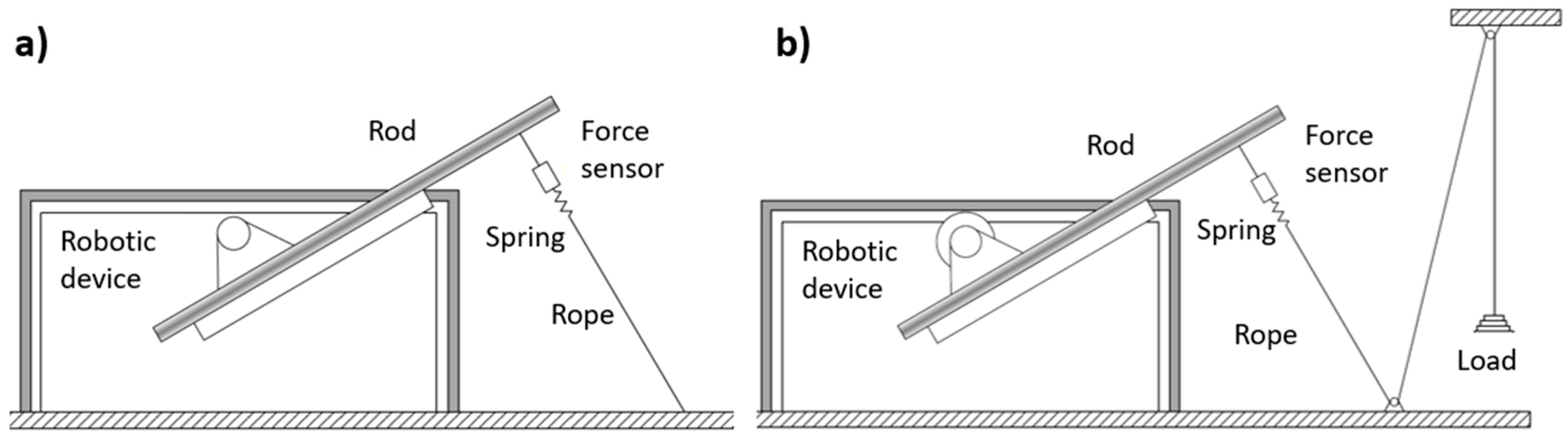
4.3. Achilles: A Robotic Device for Ankle Rehabilitation
- to counteract a maximum torque applied by the human subject, maintaining a set position to determine the subject’s capabilities;
- to generate a motion of the attached body segments within pre-defined physiologically safe torque limits.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human–robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef] [Green Version]
- IFR. World Robotic Report 2020. Available online: https://ifr.org/ifr-press-releases/news/record-2.7-million-robots-work-in-factories-around-the-globe (accessed on 30 January 2021).
- Peters, B.S.; Armijo, P.R.; Krause, C.; Choudhury, S.A.; Oleynikov, D. Review of emerging surgical robotic technology. Surg. Endosc. 2018, 32, 1636–1655. [Google Scholar] [CrossRef] [PubMed]
- Riek, L.D. Healthcare robotics. Commun. ACM 2017, 60, 68–78. [Google Scholar] [CrossRef]
- Duckett, T.; Pearson, S.; Blackmore, S.; Grieve, B.; Wilson, P.; Gill, H.; Hunter, A.J.; Georgilas, I. Agricultural Robotics: The Future of Robotic Agriculture; UK-RAS Network: London, UK, 2018. [Google Scholar]
- Kimmig, R.; Verheijen, R.H.M.; Rudnicki, M. Robot assisted surgery during the COVID-19 pandemic, especially for gyne-cological cancer: A statement of the Society of European Robotic Gynaecological Surgery (SERGS). J. Gynecol. Oncol. 2020, 31, e59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tavakoli, M.; Carriere, J.; Torabi, A. Robotics, smart wearable technologies, and autonomous intelligent systems for healthcare during the COVID-19 pandemic: An analysis of the state of the art and future vision. Adv. Intell. Syst. 2020, 2. [Google Scholar] [CrossRef]
- Zeng, Z.; Chen, P.-J.; Lew, A.A. From high-touch to high-tech: COVID-19 drives robotics adoption. Tour. Geogr. 2020, 22, 724–734. [Google Scholar] [CrossRef]
- Good Work Charter of the European Robotics Industry. EUnited Robotics. Available online: https://www.eu-nited.net/eunited+aisbl/robotics/news/european-charter-for-robots-and-humans-released-by-engineering-association-eunited.html (accessed on 30 January 2021).
- Vasic, M.; Billard, A. Safety issues in human-robot interactions. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 197–204. [Google Scholar]
- Guiochet, J.; Do Hoang, Q.A.; Kaâniche, M.; Powell, D. Applying Existing Standards to a Medical Rehabilitation Robot: Limits and Challenges. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012. [Google Scholar]
- Gopinath, V.; Johansen, K.; Derelöv, M.; Gustafsson, Å.; Axelsson, S. Safe collaborative assembly on a continuously moving line with large industrial robots. Robot. Comput. Manuf. 2021, 67, 102048. [Google Scholar] [CrossRef]
- Saenz, J.; Behrens, R.; Schulenburg, E.; Petersen, H.; Gibaru, O.; Neto, P.; Elkmann, N. Methods for considering safety in design of robotics applications featuring human-robot collaboration. Int. J. Adv. Manuf. Technol. 2020, 107, 2313–2331. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging research fields in safety and ergonomics in industrial collaborative robotics: A systematic literature review. Robot. Comput. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Kumar, S.; Savur, C.; Sahin, F. Survey of human–robot collaboration in industrial settings: Awareness, intelligence, and compliance. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 280–297. [Google Scholar] [CrossRef]
- Marvel, J.A. Performance metrics of speed and separation monitoring in shared workspaces. IEEE Trans. Autom. Sci. Eng. 2013, 10, 405–414. [Google Scholar] [CrossRef]
- European Parliament. Directive 2006/42/EC on Machinery; European Parliament: Brussels, Belgium, 2006. [Google Scholar]
- European Parliament. Regulation (EU) 2017/745 on Medical Devices; European Parliament: Brussels, Belgium, 2017. [Google Scholar]
- Bessler, J.; Prange-Lasonder, G.B.; Schaake, L.; Saenz, J.F.; Bidard, C.; Fassi, I.; Valori, M.; Lassen, A.B.; Buurke, J.H. Safety assessment of rehabilitation robots: A review identifying safety skills and current knowledge gaps. Front. Robot. AI 2021, 8. [Google Scholar] [CrossRef]
- European Parliament. Directive 2001/95/EC on General Product Safety; European Parliament: Brussels, Belgium, 2001. [Google Scholar]
- European Parliament. Low Voltage Directive 2014/13/EU; European Parliament: Brussels, Belgium, 2013. [Google Scholar]
- European Parliament. Directive 2014/30/EU on the Harmonization of the Laws of the Member States Relating to Electromagnetic Compatibility; European Parliament: Brussels, Belgium, 2014. [Google Scholar]
- European Parliament. Radio Equipment Directive 2014/53/EU; European Parliament: Brussels, Belgium, 2014. [Google Scholar]
- COVR. Toolkit. Available online: https://www.safearoundrobots.com/home (accessed on 30 January 2021).
- ISO 12100:2010. Safety of Machinery—General Principles for Design—Risk Assessment and Risk Reduction; International Or-ganization for Standardization: Geneva, Switzerland, 2010. [Google Scholar]
- ISO 14971:2019. Medical Devices—Application of Risk Management to Medical Devices; International Organization for Standardization: Geneva, Switzerland, 2019. [Google Scholar]
- ISO 10218-1:2011. Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 1: Robots; International Organization for Standardization: Geneva, Switzerland, 2011. [Google Scholar]
- ISO 10218-2:2011. Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Inte-gration; International Organization for Standardization: Geneva, Switzerland, 2011. [Google Scholar]
- ISO/TS 15066:2016. Robots and Robotic Devices—Collaborative Robots; International Organization for Standardization: Geneva, Switzerland, 2016. [Google Scholar]
- ISO 13855:2010. Safety of Machinery—Positioning of Safeguards with Respect to the Approach Speeds of Parts of the Human Body; International Organization for Standardization: Geneva, Switzerland, 2010. [Google Scholar]
- ISO 18497:2018. Agricultural Machinery and Tractors—Safety of Highly Automated Machinery; International Organization for Standardization: Geneva, Switzerland, 2018. [Google Scholar]
- ISO 13851:2019. Safety of Machinery—Two-Hand Control Devices—Principles for Design and Selection; International Organi-zation for Standardization: Geneva, Switzerland, 2019. [Google Scholar]
- ISO 13482:2014. Robots and Robotic Devices—Safety Requirements for Personal Care Robots; International Organization for Standardization: Geneva, Switzerland, 2014. [Google Scholar]
- ISO 3691-4:2020. Industrial Trucks—Safety Requirements and Verification—Part 4: Driverless Industrial Trucks and Their Systems; International Organization for Standardization: Geneva, Switzerland, 2020. [Google Scholar]
- IEC 80601-2-78:2020. Medical Electrical Equipment—Part 2-78: Particular Requirements for Basic Safety and Essential Performance of Medical Robots for Rehabilitation, Assessment, Compensation or Alleviation; International Electrotechnical Commission: Geneva, Switzerland, 2020. [Google Scholar]
- ISO/TR 23482-1:2020. Application of ISO 13482—Part 1: Safety-Related Test Methods; International Organization for Stand-ardization: Geneva, Switzerland, 2020. [Google Scholar]
- ISO/TR 20218-1:2018. Robotics—Safety Design for Industrial Robot Systems—Part 1: End-Effectors; International Organization for Standardization: Geneva, Switzerland, 2018. [Google Scholar]
- ISO/TR 20218-2:2017. Robotics—Safety Requirements for Industrial Robots—Part 2: Manual Load/Unload Stations; International Organization for Standardization: Geneva, Switzerland, 2017. [Google Scholar]
- ISO/DIS 10218-2:2020. Robotics—Safety Requirements for Robot Systems in an Industrial Environment—Part 2: Robot Systems, Robot Applications and Robot Cells Integration; International Organization for Standardization: Geneva, Switzerland, 2020. [Google Scholar]
- ISO 18646-1:2016. Robotics—Performance Criteria and Related Test Methods for Service Robots—Part 1: Locomotion for Wheeled Robots; International Organization for Standardization: Geneva, Switzerland, 2016. [Google Scholar]
- ISO 18646-2:2019. Robotics—Performance Criteria and Related Test Methods for Service Robots—Part 2: Navigation; International Organization for Standardization: Geneva, Switzerland, 2019. [Google Scholar]
- Saenz, J.; Lassen, A.B.; Bidard, C.; Burke, J.H.; Nielsen, K.; Schaake, L.; Vicentini, F. COVR—Towards simplified evaluation and validation of collaborative robotics applications across a wide range of domains using robot safety skills. In Proceedings of the 9th International Conference on Safety of Industrial Automated Systems (SIAS), Nancy, France, 10–12 October 2018. [Google Scholar]
- Collaborative robot systems. Design of Systems with "Power and Force Limiting" Function; Fachbereich Holz und Metall, German Social Accident Insurance (DGUV): Heidelberg, Germany, 2017. [Google Scholar]
- CEN. EN 1525-Safety of Industrial Trucks—Driverless Trucks and Their Systems; European Committee for Standardization: Brussels, Belgium, 1997. [Google Scholar]
- Herbster, S.; Behrens, R.; Elkmann, N. A New Conversion Method to Evaluate the Hazard Potential of Collaborative Robots in Free Collisions. Experimental Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 222–232. [Google Scholar]
- Diederick, C.; Niehorster, L.; Lappe, M. The accuracy and precision of position and orientation tracking in the HTC vive virtual reality system for scientific research. I-Perception 2017, 8, 2041669517708205. [Google Scholar]




| Standard | Test | Section | Description |
|---|---|---|---|
| ISO/DIS 10218-2: 2020 [40] | Power- and force-limited robot applications—pressure and force measurements | Annex N | The required measuring device for the measurements is described, which has to incorporate a spring and a soft pad, whose hardness and stiffness, respectively, must comply with specific values depending on the body part involved in the potential contact. The setup, measurement and data analysis procedures are then described to test both quasi-static (clamping) and transient contact force events. |
| ISO 3691-4: 2020 [35] | Tests for detection of persons | § 5.2 | The truck travels towards a cylindrical test piece with defined dimensions, placed in different positions and poses along the path. Test success corresponds to a full truck stop before contact (in case of contactless detection means) or to a contact with a limited interaction force (in case of bumper-based detection), observed over three repetitions. |
| Stability tests | § 5.3 | The worst-case conditions must be replicated (loaded, unloaded, lift height, slope, turn, forward direction, backward direction, floor/ground slope) and be stable, or otherwise, stability can be proved by calculations. | |
| ISO/TR 23482-1: 2020 [37] | Physical hazard characteristics | § 6 | It includes voltage at user-accessible parts, acoustic noise and surface temperature. |
| Physical hazard characteristics (for mobile robots) | § 7 | This category includes the tests of injury parameters in collision, performed using a dummy with features as per the US code of Federal Regulations and the tests of force control for intended and unintended contact with a robot, performed with a contact piece simulating the human body part and a force transducer and a pressure sensor as sensing equipment. In both cases, the acquired impact force values are compared with the ones listed in the ISO/TS 15066. | |
| Physical hazard characteristics (for restraint-type physical ass. robots) | § 8 | The physical stress or strain to the user is tested by means of a setup composed by a force sensor, a dummy, a cuff with force/pressure sensing capability and a manipulator moving the cuff. The combination of tangential traction forces and continuous repeated rubbing contact acquired is compared with reference curves referred to the generation of blisters in human skin. | |
| Static stability characteristics | § 11 | The robot is placed on a test plane with a slope, if necessary for the type of vehicle transporting a dummy, and the stability is observed. | |
| Dynamic stability characteristics with respect to moving parts (mobile robot) | § 12 | The robot is placed on a test plane with a slope, if necessary with a dummy simulating shifting loads. The worst-case directions are considered, and the robot moves, maximizing the generated dynamic forces and, if appropriate, moving loads or dynamic passengers are also simulated. | |
| Dynamic stability characteristics with respect to travel (for mobile robot) | § 13 | Replicating the same working conditions, with the use of dummies if necessary, stability tests are performed on a flat surface (breaking and acceleration tests), on an inclined surface (maximum speed, acceleration and braking on downward slope, upward slope acceleration, downward slope full turn, crossing, pivot turn) and in relation to potential steps and gaps in the environment. | |
| Safety-related control functions (universal) | § 14 | Different tests consider the electro-sensitive protective equipment (ESPE), performed with human-like objects to be detected, the operation in slippery environments, and electro-magnetic immunity. | |
| Response to safety-related obstacles on the ground (mobile robot) | § 15 | These tests include the assessment of:
| |
| Safety-related localization and navigation | § 16 | With a pre-defined environment map and programmed path, an obstacle is positioned in different positions along the robot path. Jerky robot movements, unexpected stops or other potentially hazardous movements are detected. | |
| Reliability of autonomous decisions and actions (universal) | § 17 | These tests are related to the autonomous action of identifying an object, interpreting user commands, choosing a strategy to minimize the collision risk, etc. The document describes only the test for object identification. | |
| ISO 18646-1:2016 [41] | Rated speed | § 5 | The aim of the test is to determine the wheeled robot rated speed for travel-related tasks. In a cycle consisting in acceleration, constant speed, and deceleration, two sensors detect the passage of the robot at constant speed and the rated speed is obtained by calculation. |
| Stopping characteristics | § 6 | The robot moves in a straight line up to the rated speed; afterwards a stop command is initiated. Once the robot is fully stopped, stopping distance and times are obtained by the acquisitions. | |
| ISO 18646-2:2019 [42] | Obstacle detection | § 6 | This is a static test in which six different obstacles are positioned at specific distances from the robot, corresponding to the maximum and minimum acquisition ranges declared by the manufacturer, with different orientations with respect to the line of sight. |
| Obstacle avoidance | § 7 | This test determines the ability of the robot of reaching a goal position avoiding moving obstacles along its path. The test is performed by commanding moving obstacles to move along a path, normally causing collision with the robot, which is, in turn, commanded to autonomously move along a path. The test is repeated with different obstacle trajectories. The test is successful if the robot reaches the goal position in all the trails, and a time “delay factor” is calculated. |
| Icon | Safety Skill | Corresponding Operating Modes and/or Testing Procedures with Standard Reference |
|---|---|---|
 | Maintain safe distance (MSD) | |
 | Maintain dynamic stability (DYS) | |
 | Limit physical interaction energy (LIE) |
|
 | Limit range of movement (LRM) | |
 | Maintain proper alignment (MPA) |
|
 | Limit restraining energy (LRE) |
|
| Section | Contents |
|---|---|
| Introduction |
|
| Concept and objectives |
|
| Conditions |
|
| Setup |
|
| Procedure |
|
| Annexes |
|
| Device Type | MSD | DYS | LIE | LRM | MPA | LRE | |
|---|---|---|---|---|---|---|---|
| Robotic arm | ROB | 1, 2 * | - | 1, 2 | 1, 2, 3, 4, 5 * | - | 1 |
| Mobile platform | MOB | 1 | 1 | 1 | 1 | - | - |
| Exoskeleton | EXO | - | - | 1 | 1 | 1 | 1 * |
| Gripper ** | GRI | - | - | 1 | 1 | - | - |
| Weight support | WSU | - | - | 1 * | 1 * | 1 * | 1 * |
| Balance Trainer | BAT | - | - | 1 * | 1 * | 1 * | 1 * |
| Mobile robot | MRO | - | 1 | 1 | - | - | - |
| ID 1 | Conditions | Object | Main Reference | Metrics | Sensing Device(s) | Data Analysis | Repetitions |
|---|---|---|---|---|---|---|---|
| ROB-MSD-1 | Indoor/factory | Human entering robot workspace | ISO 13855 [31] ISO/TS 15066 [30] | Safety Distance Ss | String potentiometer, triggering actuator | Ss ≤ SP or Xs ≤ XH | 5 |
| ROB-LIE-1 | Indoor/factory | Moving obstacle (human body part) | ISO/TS 15066 [30] DGUV FBHM 080 [44] | Transient contact force and pressure | Force and pressure (biofidelity to the specific body part) | Filtering, correction 2, comparison with limits in [30] | 3 |
| ROB-LIE-2 | Indoor/factory | Stationary obstacle (human body part) | ISO/TS 15066 [30] DGUV FBHM 080 [44] | Transient and quasi-static contact force and pressure | Force and pressure (biofidelity to the specific body part) | Filtering, comparison with limits in [30] | 3 |
| ROB-LRE-1 | Robotic device, single human joint | Pre-defined torque, human body part | IEC 80601-2-78 [36] | Effective torque | Force sensor | Obtain torque and compare with limits | 2 per 3 sets |
| ROB-LRM-1 | Indoor/ factory | Vertical plane (workspace limit) | ISO 10218-2 [29] ISO 10218-1 [28] | Robot structure point Pcross crosses plane [T/F] | Light barrier or target plane + camera or similar | Check Pcross does not cross the plane | 3 (change angle) |
| ROB-LRM-2 | RACA, 3D mov., robot control | Pre-defined ROM, human body part | IEC 80601-2-78 [36] | ROM exit [T/F], potential collision [T/F] | Optoelectronic measurement or motion tracking system | Acquire robot motion and compare to ROM | |
| ROB-LRM-3 | RACA, 3D mov., co-control | Pre-defined ROM, human body part | IEC 80601-2-78 [36] | ROM exit [T/F], potential collision [T/F] | Optoelectronic measurement or motion tracking system | Acquire robot motion (external co-guiding) and compare to ROM | |
| ROB-LRM-4 | RACA, 3D mov., co-control | Pre-defined ROM, human body part | IEC 80601-2-78 [36] | ROM exit [T/F], potential collision [T/F] | Instrumented limb (angular encoders) attached to the end-effector | Obtain robot motion (external co-guiding) and compare to ROM | |
| MOB-LRM-1 | Indoor | Forbidden area | Footprint observation: entrance in forbidden area [T/F] | Position tracker or video-camera or light curtain or laser scanner or similar | Acquire robot motion from top or process the acquisition | 3 | |
| MOB-DYS-1 | Indoor | Accelerations, stops, payload, floor tilt | EN 1525 [45] ISO 3691-4 [35] | ROLL, PITCH angles below limits [T/F] | Video-camera, inclinometer | Apply safety factor, compare with limits | 5 |
| MOB-LIE-1 | Indoor/ factory | Stationary obstacle (human body part) | ISO/TS 15066 [30] DGUV FBHM 080 [44] | Quasi-static contact force and pressure | Force and pressure (biofidelity to the specific body part) | Filtering, comparison with limits in [30] | 3 |
| MOB-MSD-1 | Indoor/outdoor | Stationary obstacle | EN 1525 [45] ISO 3691-4 [35] | Distance from detected obstacle after stop | Distance measuring system, ground markers. | Compare with limit in risk assessment | 3 |
| EXO-LIE-1 | Exoskeleton | Stationary/moving obstacle (therapist body part) | ISO/TS 15066 [30] DGUV FB HM080 [44] | Transient and quasi-static contact force and pressure | Force and pressure (biofidelity to the specific body part) | Filtering, correction (trans.), comparison with limits in [30] | 3 |
| EXO-LRM-1 | Segments of an exoskeleton | Swinging limb segments | IEC 80601-2-78 [36] | Joint flexion/extension angles | Electro-goniometer | Filtered values must be >0° and comply with subject limits | |
| EXO-MPA-1 | Exoskeleton/ Restrain-type RACA | Limb segments | IEC 80601-2-78 [36] | Force and torque in joint(s), misalignment | Optoeletronic measurement or similar, instrumented limb | Calculate joint forces and torqes and compare with limits | |
| GRI-LIE-1 | Any gripper | Stationary/moving obstacle (human body part) | ISO/TS 15066 [30] DGUV FBHM 080 [44] | Transient and quasi-static contact force and pressure | Force and pressure (biofidelity to the specific body part) | Filtering, correction (transient), comparison with thresholds in [30] | 3 |
| GRI-LRM-1 | Any gripper | Obstacle (human body part) | Minimum gap after closure (pre-defined) | Gauge blocks or similar | Observe object position after (failed) pick | 5 | |
| MRO-DYS-1 | Indoor | Accelerations, stops, payload, floor tilt | EN 1525 [45] ISO 3691-4 [35] ISO 18646-1 [41] | ROLL, PITCH angles below limits [T/F] | Inclinometer | Apply safety factor, compare with limits | 5 |
| MRO-LIE-1 | Indoor/ factory | Stationary obstacle (human body part) | ISO/TS 15066 [30] DGUV FBHM 080 [44] | Quasi-static contact force and pressure | Force and pressure (biofidelity to the specific body part) | Filtering, comparison with thresholds in [30] | 3 |
| Contact Point | Body Region | Spring Stiffness [N/mm] | Damping Material [44] [SH] | Permissible Values TR 1 | Validated Permissible Velocities | |||
|---|---|---|---|---|---|---|---|---|
| Force [N] | Pressure [N/cm2] | x (PtP 1) [deg/s] | y (Linear) [mm/s] | z (Linear) [mm/s] | ||||
| P1 | Sternum | 25 | 70 | 280 | 240 | 30 | 200 | unlikely |
| P2 | Abdomen | 10 | 10 | 220 | 220 | 30 | 200 | unlikely |
| P2 | Back Hand | 75 | 70 | 280 | 400 | 20 | 150 | 300 |
| P3 | Abdomen | 10 | 10 | 220 | 220 | 45 | 400 | unlikely |
| P3 | Back Hand | 75 | 70 | 280 | 400 | 30 | 300 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valori, M.; Scibilia, A.; Fassi, I.; Saenz, J.; Behrens, R.; Herbster, S.; Bidard, C.; Lucet, E.; Magisson, A.; Schaake, L.; et al. Validating Safety in Human–Robot Collaboration: Standards and New Perspectives. Robotics 2021, 10, 65. https://doi.org/10.3390/robotics10020065
Valori M, Scibilia A, Fassi I, Saenz J, Behrens R, Herbster S, Bidard C, Lucet E, Magisson A, Schaake L, et al. Validating Safety in Human–Robot Collaboration: Standards and New Perspectives. Robotics. 2021; 10(2):65. https://doi.org/10.3390/robotics10020065
Chicago/Turabian StyleValori, Marcello, Adriano Scibilia, Irene Fassi, José Saenz, Roland Behrens, Sebastian Herbster, Catherine Bidard, Eric Lucet, Alice Magisson, Leendert Schaake, and et al. 2021. "Validating Safety in Human–Robot Collaboration: Standards and New Perspectives" Robotics 10, no. 2: 65. https://doi.org/10.3390/robotics10020065
APA StyleValori, M., Scibilia, A., Fassi, I., Saenz, J., Behrens, R., Herbster, S., Bidard, C., Lucet, E., Magisson, A., Schaake, L., Bessler, J., Prange-Lasonder, G. B., Kühnrich, M., Lassen, A. B., & Nielsen, K. (2021). Validating Safety in Human–Robot Collaboration: Standards and New Perspectives. Robotics, 10(2), 65. https://doi.org/10.3390/robotics10020065