
On the Modelling of Tethered Mobile Robots as Redundant Manipulators



Abstract
:1. Introduction
- High-power/consumption applications, e.g., welding applications, long-duration and perpetual drone flight,
- Exploration of environments which prevent tele-control, e.g., caves, tunnels or mines, underwater environments,
- Transfer of matter from a base station to the robot, e.g., the transfer of paint and compressed air in robotized painting applications.
2. Related Works
2.1. Tethered Robots
2.2. Approaches towards Robot Redundancy
3. Methodology
4. Case Study
- The mobile robots must be moving simultaneously in a cluttered environment; the leader must be capable of reaching the target point in the task space by tracking a reference trajectory;
- The robots must not collide with themselves and with the obstacles;
- Neither of the three tethers must touch the ground nor hit any of the surrounding obstacles;
- The distance between each consecutive robot must be a trade-off between their local minimization and uniformity with the other tethers length.
4.1. Tasks Definition
4.1.1. Primary Task: Trajectory Tracking
4.1.2. Secondary Task: Joint Limits Avoidance
4.1.3. Secondary Task: Obstacle Avoidance
4.2. Control
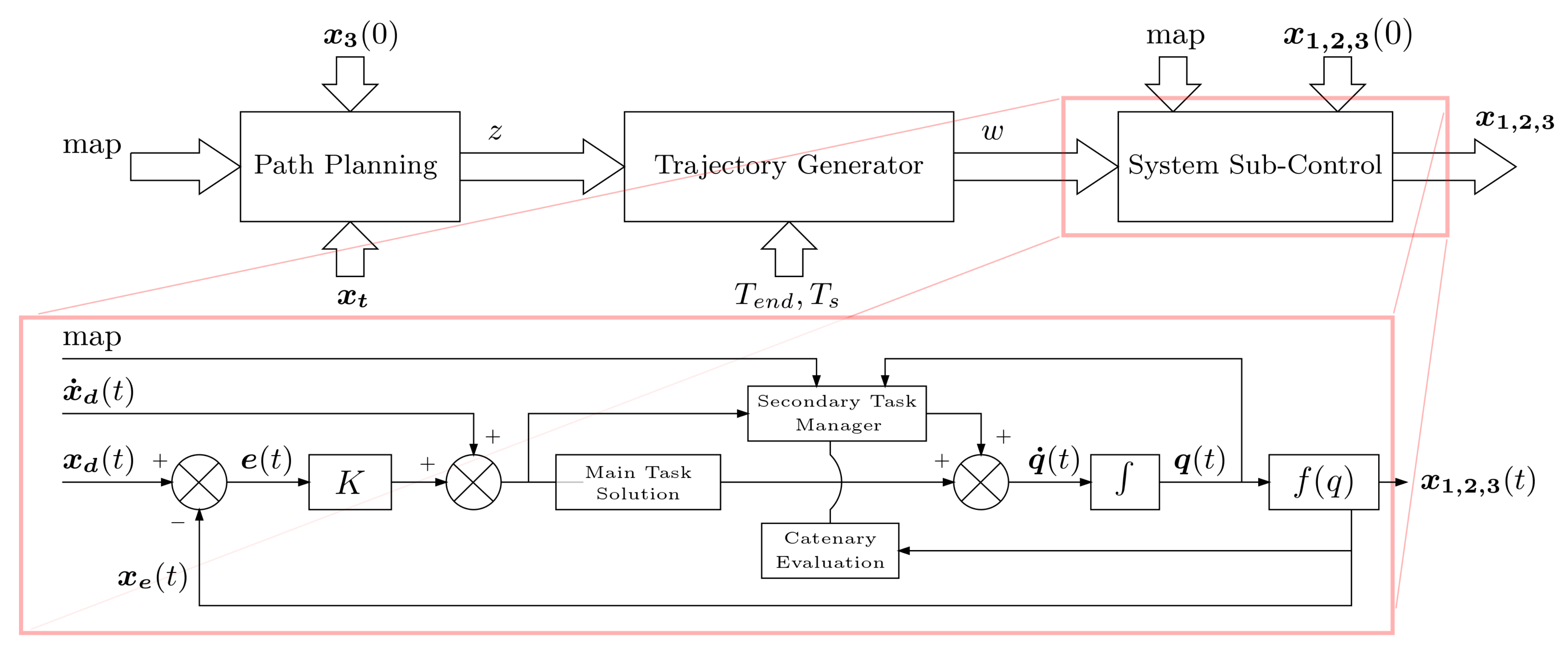
- Planner: Is responsible for generating a free obstacle path for the end-effector of the equivalent RM starting from an already known discrete map of the environment, and the initial pose of the equivalent RM. The free obstacle path is obtained by means of a graph search algorithm, more precisely the RRT* [41], and stored in a data structure we will denote with .
- Trajectory Generator: Given a desired time, it is responsible for generating a trajectory passing through the points generated by the planner block. To generate a time based trajectory, a B-spline has been used. The duration of the trajectory has been fixed to s and the sampling period to s. In particular, by denoting as w the trajectory data structure, composed by points, we have with its components the time-series of values , and respectively, for .
- System Sub-Control: This is the most important block because it is here that the CLIK algorithm works. It takes as input the trajectory data structure w generated from the Trajectory Generator and an additional data structure containing important data about the map (such as the distance field and its gradient). As output, this block returns a data structure containing the three trajectories the TMRs have to track, denoted with in Figure 4. By expanding this block, a subsystem control loop can be found, which is composed by three main parts:
- (a)
- Main CLIK Algorithm: It gives a reference signal to the RM’s end-effector, which has to track it, and computes its IK;
- (b)
- Secondary Tasks Manager: it computes and arranges the terms used in the multi-task framework;
- (c)
- Parallel Catenary Evaluation: it checks at each iteration the actual pose and how the catenary is mapped. It re-arranges the gain matrix of the joints limits avoidance sub-task in order to regulate the elongation of the tether.
- If all the links of the equivalent manipulator are out of the danger collision area, only the primary task and the joints limit avoidance are activated.
- If some point of any link enters inside the danger area, then the sub task of obstacle avoidance activates, taking the priority of the joints limits avoidance, while the latter priority is been lowered. This has the effect of sacrificing part of the minimization of the distance between each mobile robots, but gaining more flexibility to avoid obstacles. This state remains active until all points are outside of the danger zone.
4.2.1. Parallel Catenary Evaluation
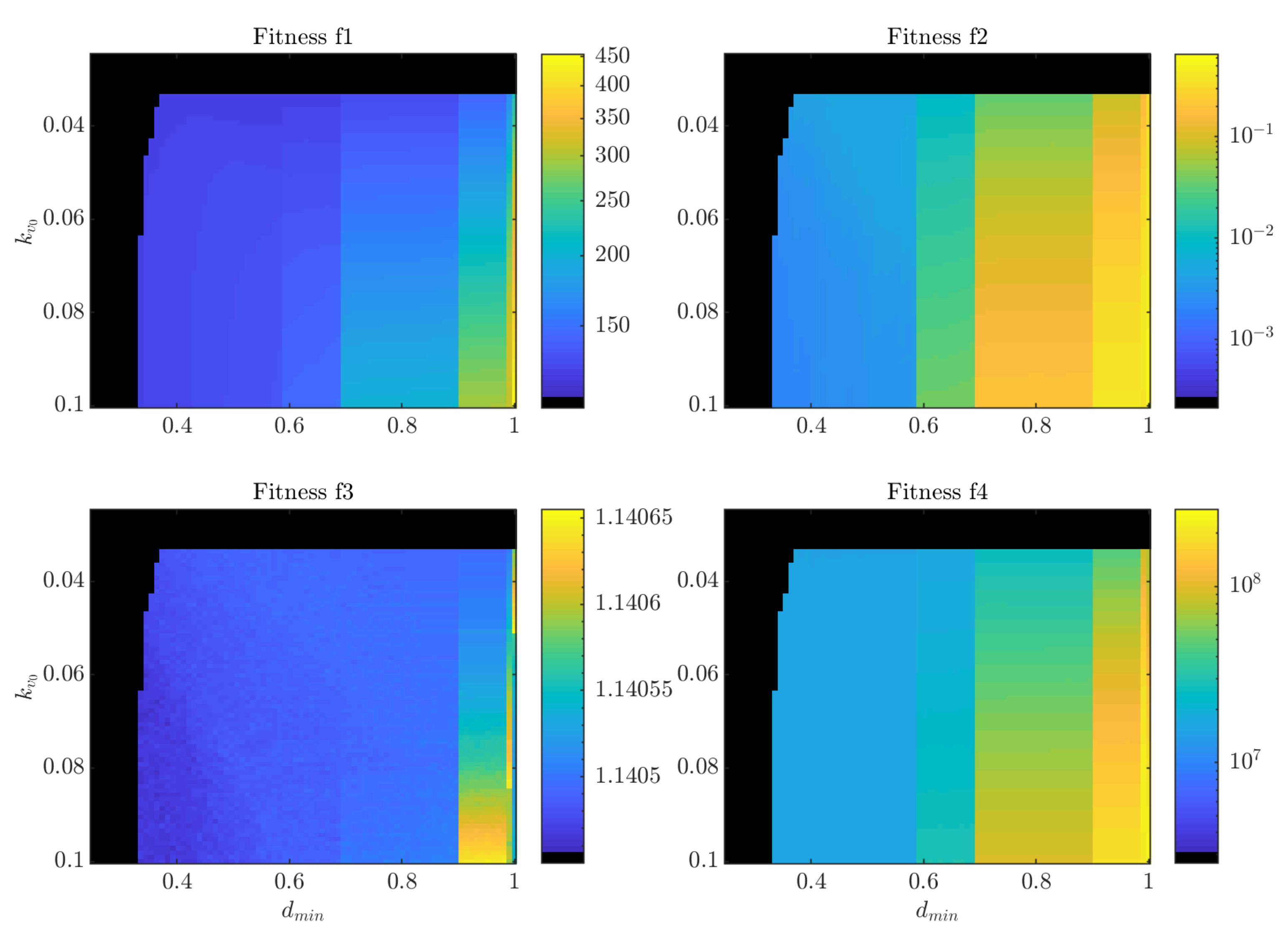
4.2.2. Parameters Tuning, Performance Function Definition and Optimization
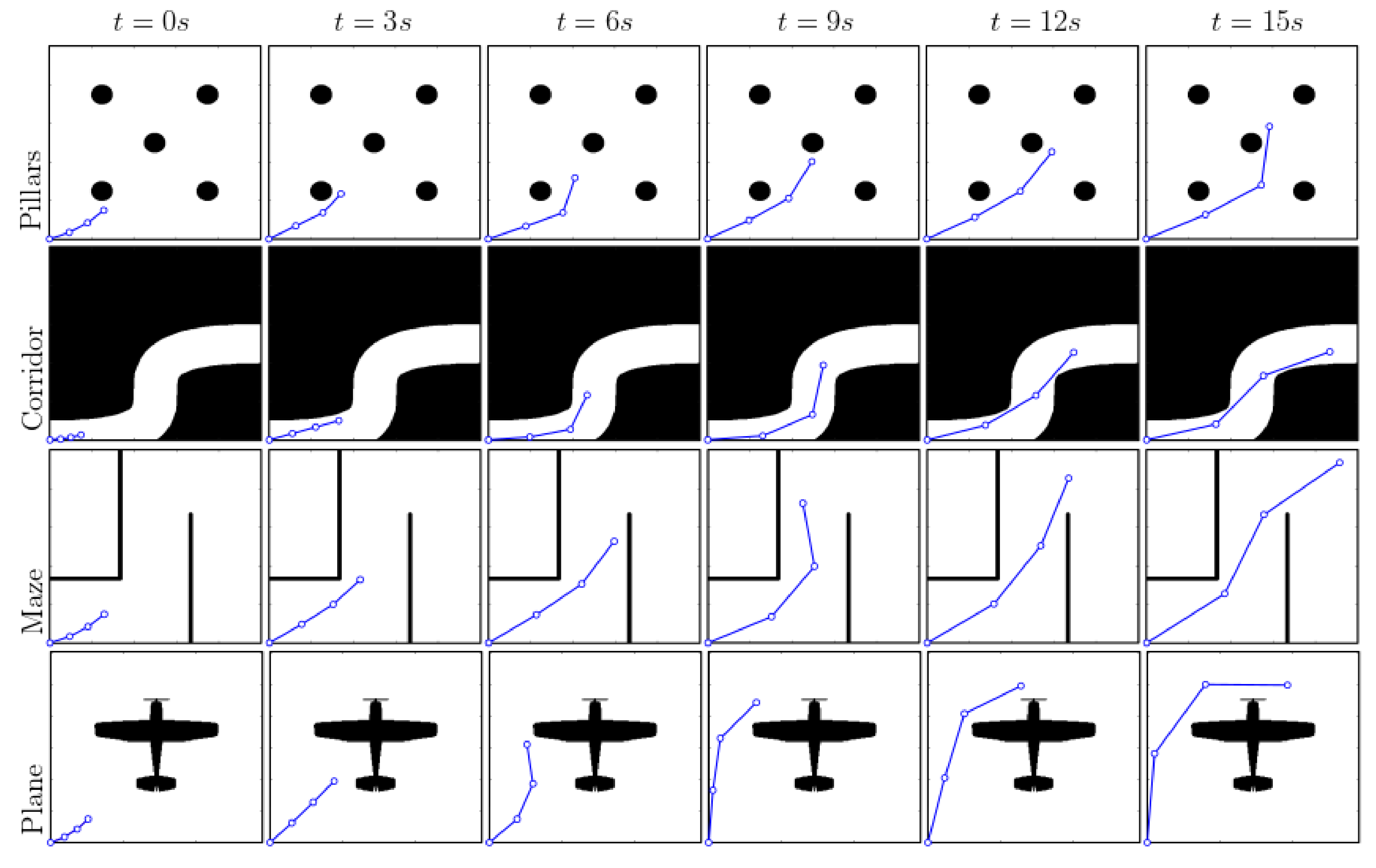
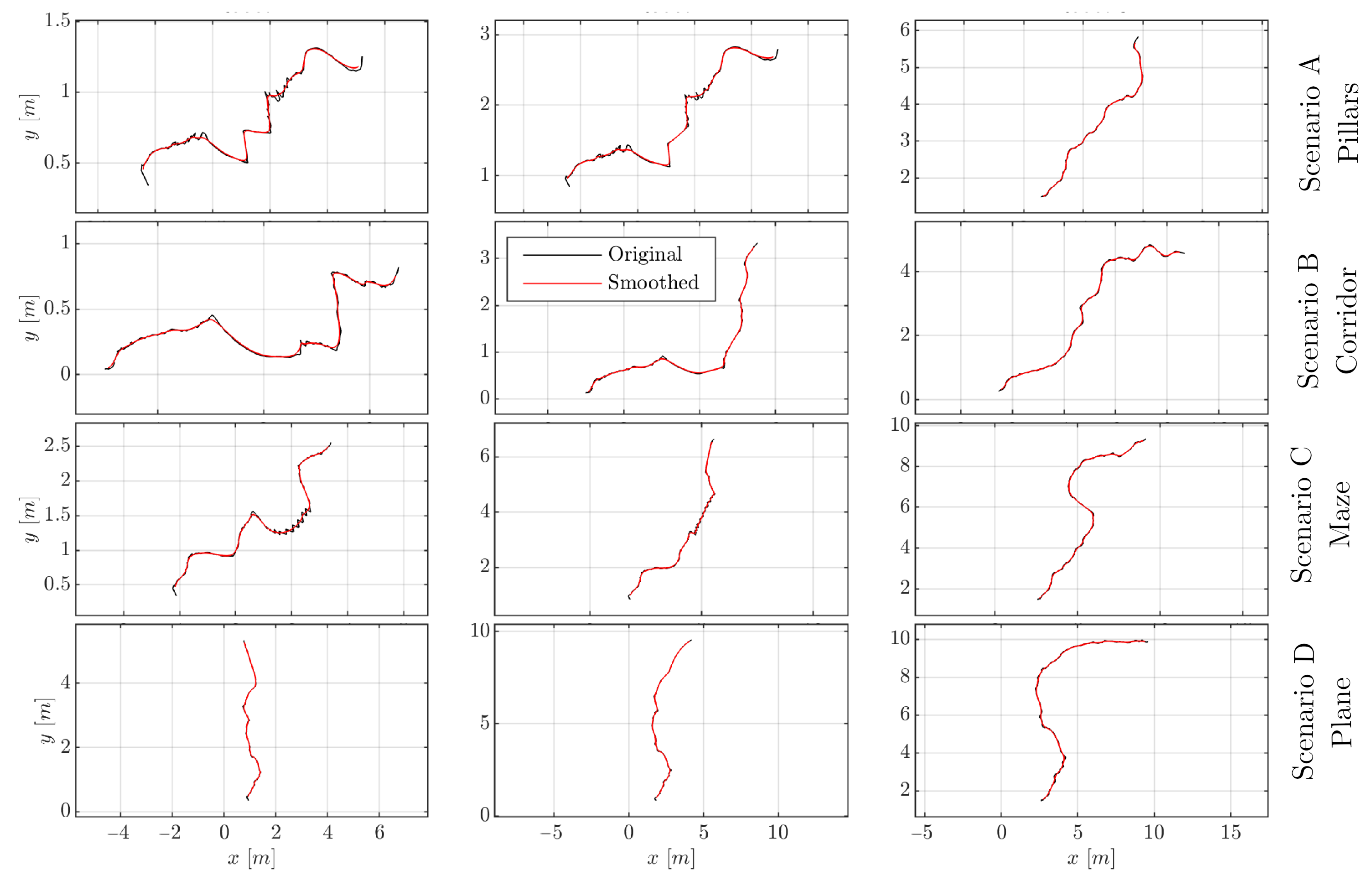
5. Results
- -
- Scenario A; a square room in which five obstacles are present, represented by disks with a certain diameter; the objective is for the last mobile robot to position itself behind the obstacle placed in the middle of the room;
- -
- Scenario B; an environment in which there is a high-curvature path representing a curved corridor leading out of the room. The aim in this scenario for the last robot is to reach the end of the corridor.
- -
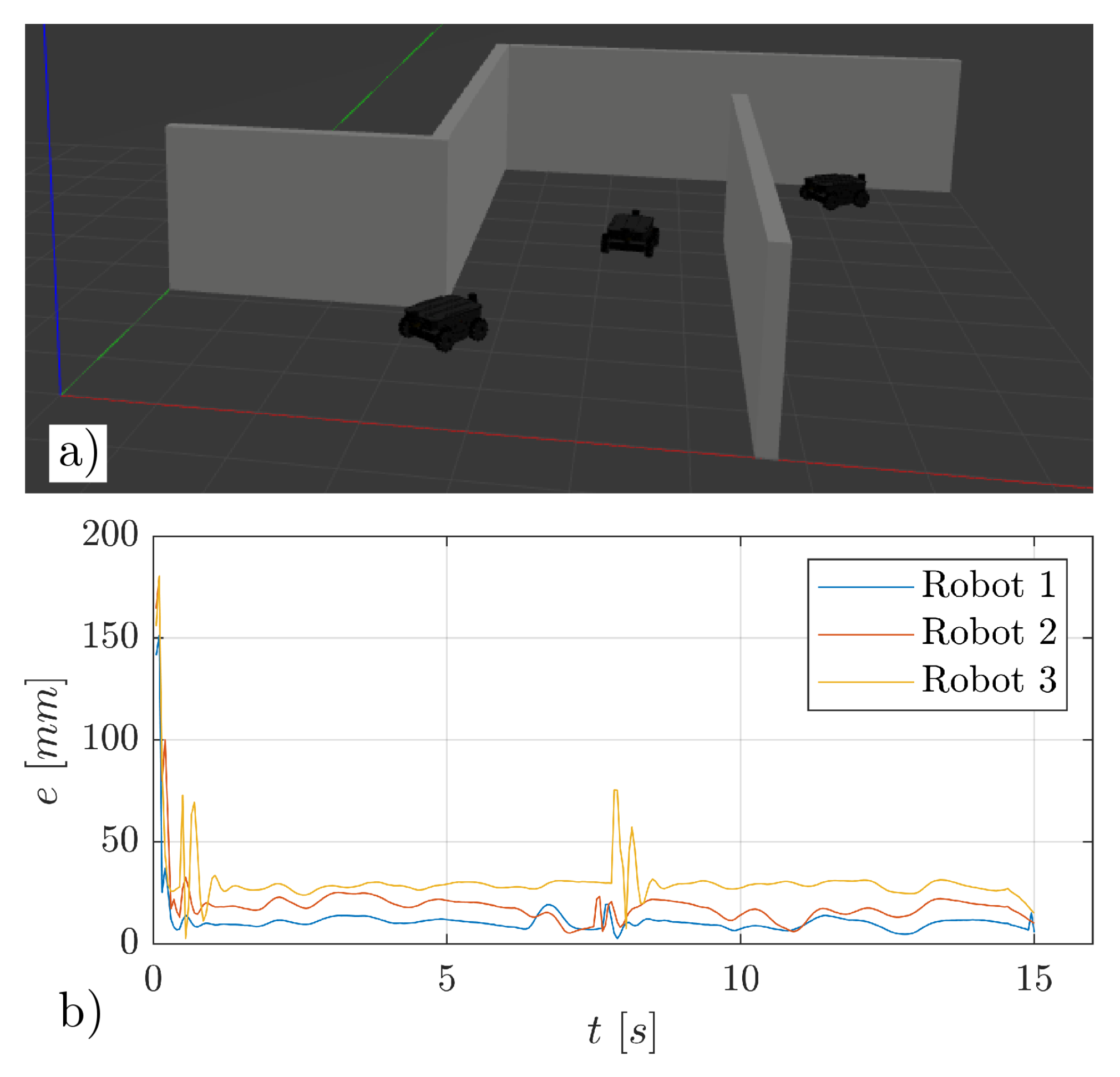
- Scenario C; a square room in which some walls are modeled in order to simulate a small maze. The aim in this scenario is for the last robot to position itself in the top right corner of the room;
- -
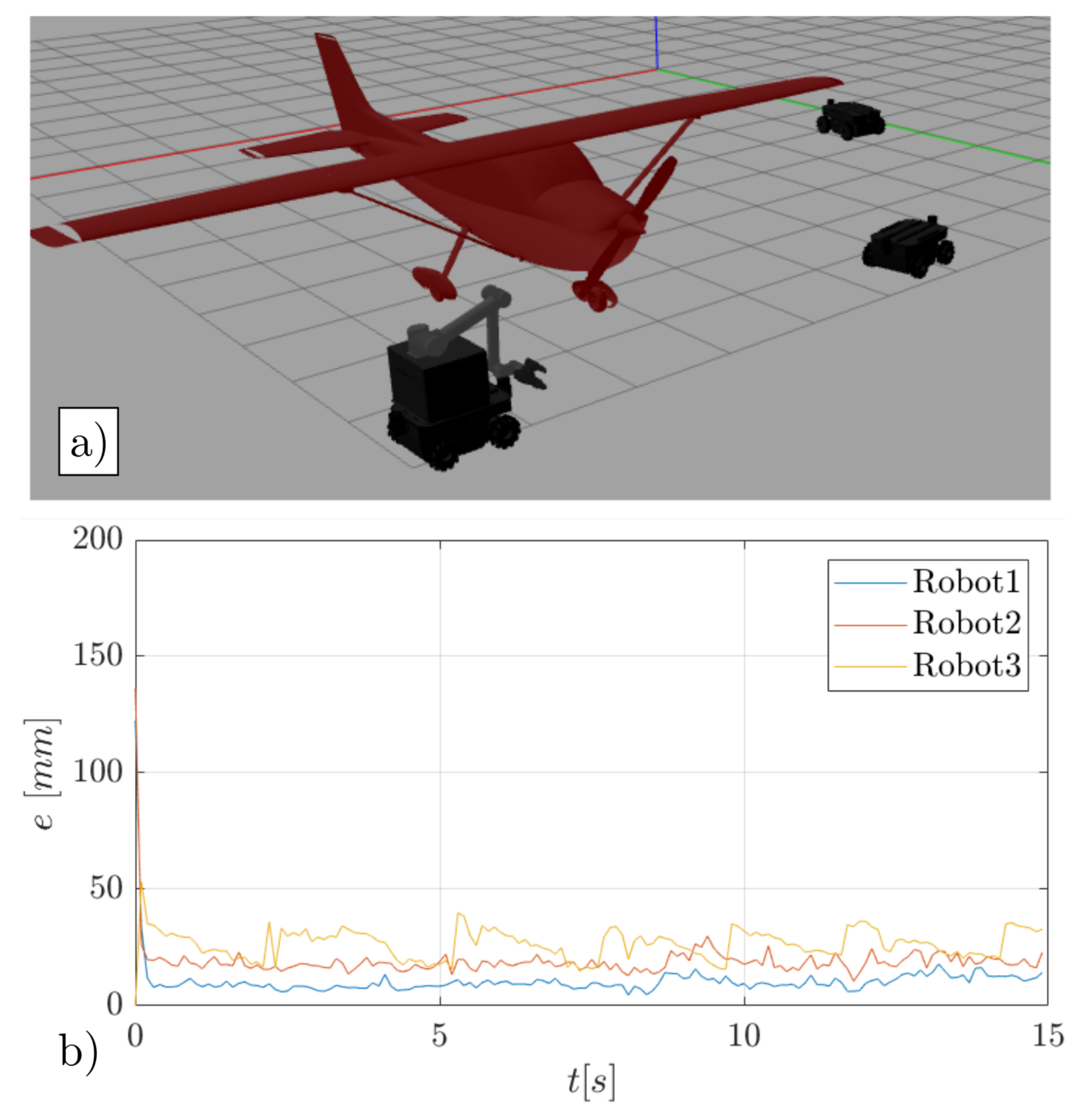
- Scenario D; a square room where a model of the Cessna C-172 is present, which needs to be worked on by the robots, for example, in this case robotic painting. The aim in this scenario is for the last robot to move around the plane and position on the opposite side.
5.1. Fitness: Sensitivity Analysis
5.2. ROS and Gazebo Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ajwad, S.; Iqbal, J. Recent Advances and Applications of Tethered Robotic Systems. Sci. Int. 2014, 26, 2045–2051. [Google Scholar]
- Zhang, X.; Pham, Q.C. Planning coordinated motions for tethered planar mobile robots. Robot. Auton. Syst. 2019, 118, 189–203. [Google Scholar] [CrossRef] [Green Version]
- Fagiano, L. Systems of Tethered Multicopters: Modeling and Control Design. IFAC-PapersOnLine 2017, 50, 4610–4615. [Google Scholar] [CrossRef]
- Tognon, M.; Franchi, A. Nonlinear observer for the control of bi-tethered multi aerial robots. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1852–1857. [Google Scholar]
- Kosarnovsky, B.; Arogeti, S. A String of Tethered Drones—System Dynamics and Control. In Proceedings of the 2019 European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 4–6 September 2019; pp. 1–6. [Google Scholar]
- McLain, T.W.; Rock, S.M. Experimental Measurement of ROV Tether Tension. In Proceedings of the Intervention/ROV ’92, San Diego, CA, USA, 10–12 June 1992; pp. 291–296. [Google Scholar]
- McGarey, P.; Polzin, M.; Barfoot, T.D. Falling in line: Visual route following on extreme terrain for a tethered mobile robot. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2027–2034. [Google Scholar]
- Krishna, M.; Bares, J.; Mutschler, E. Tethering system design for Dante II. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 2, pp. 1100–1105. [Google Scholar]
- Nagatani, K.; Tatano, S.; Ikeda, K.; Watanabe, A.; Kuri, M. Design and development of a tethered mobile robot to traverse on steep slope based on an analysis of its slippage and turnover. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2637–2642. [Google Scholar]
- Sebok, M.A.; Tanner, H.G. On the Hybrid Kinematics of Tethered Mobile Robots. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 25–30. [Google Scholar] [CrossRef]
- Schempf, H. Neptune: Above-ground storage tank inspection robot system. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 1403–1408. [Google Scholar]
- Cheng, P.; Fink, J.; Kumar, V.; Pang, J.S. Cooperative Towing With Multiple Robots. J. Mech. Robot. 2008, 1, 011008. [Google Scholar] [CrossRef]
- Jiang, Q.; Kumar, V. Determination and stability analysis of equilibrium configurations of objects suspended from multiple aerial robots. J. Mech. Robot. 2012, 4. [Google Scholar] [CrossRef]
- Mohiuddin, A.; Zweiri, Y.; Almadhoun, R.; Taha, T.; Gan, D. Energy distribution in Dual-UAV collaborative transportation through load sharing. J. Mech. Robot. 2020, 1–14. [Google Scholar] [CrossRef]
- Erskine, J.; Chriette, A.; Caro, S. Wrench Analysis of Cable-Suspended Parallel Robots Actuated by Quadrotor Unmanned Aerial Vehicles. J. Mech. Robot. 2019, 11, 020909. [Google Scholar] [CrossRef] [Green Version]
- Lupashin, S.; D’Andrea, R. Stabilization of a flying vehicle on a taut tether using inertial sensing. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 2432–2438. [Google Scholar]
- Rasheed, T.; Long, P.; Caro, S. Wrench-Feasible Workspace of Mobile Cable-Driven Parallel Robots. J. Mech. Robot. 2020, 12, 031009. [Google Scholar] [CrossRef] [Green Version]
- Fukushima, E.F.; Kitamura, N.; Hirose, S. Development of tethered autonomous mobile robot systems for field works. Adv. Robot. 2001, 15, 481–496. [Google Scholar] [CrossRef]
- Kim, S.; Bhattacharya, S.; Kumar, V. Path planning for a tethered mobile robot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1132–1139. [Google Scholar] [CrossRef]
- Kim, S.; Likhachev, M. Path planning for a tethered robot using Multi-Heuristic A* with topology-based heuristics. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 4656–4663. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, J.; Heikkila, S.; Halme, A. Tether tracking and control of ROSA robotic rover. In Proceedings of the 2008 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 689–693. [Google Scholar]
- Baillieul, J. Kinematic programming alternatives for redundant manipulators. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; volume 2, pp. 722–728. [Google Scholar]
- Sciavicco, L.; Siciliano, B. A solution algorithm to the inverse kinematic problem for redundant manipulators. IEEE J. Robot. Autom. 1988, 4, 403–410. [Google Scholar] [CrossRef]
- Chiacchio, P.; Chiaverini, S.; Sciavicco, L.; Siciliano, B. Closed-Loop Inverse Kinematics Schemes for Constrained Redundant Manipulators with Task Space Augmentation and Task Priority Strategy. Int. J. Robot. Res. 1991, 10, 410–425. [Google Scholar] [CrossRef]
- Chiaverini, S.; Oriolo, G.; Walker, I.D. Kinematically Redundant Manipulators. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 245–268. [Google Scholar] [CrossRef]
- Simas, H.; Di Gregorio, R. A Technique Based on Adaptive Extended Jacobians for Improving the Robustness of the Inverse Numerical Kinematics of Redundant Robots. J. Mech. Robot. 2019, 11, 020913. [Google Scholar] [CrossRef]
- Nakamura, Y.; Hanufasa, H. Task Priority Based Redundancy Control of Robot Manipulators. Int. J. Robot. Res. 1987, 6, 3–15. [Google Scholar] [CrossRef]
- Maciejewski, A.A.; Klein, C.A. Obstacle Avoidance for Kinematically Redundant Manipulators in Dynamically Varying Environments. Int. J. Robot. Res. 1985, 4, 109–117. [Google Scholar] [CrossRef] [Green Version]
- Siciliano, B.; Slotine, J.E. A general framework for managing multiple tasks in highly redundant robotic systems. In Proceedings of the Fifth International Conference on Advanced Robotics ’Robots in Unstructured Environments, Pisa, Italy, 19–22 June 1991; pp. 1211–1216. [Google Scholar]
- Chiaverini, S. Task-priority redundancy resolution with robustness to algorithmic singularities. IFAC Proc. Vol. 1994, 27, 453–459. [Google Scholar] [CrossRef]
- Chiaverini, S. Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators. IEEE Trans. Robot. Autom. 1997, 13, 398–410. [Google Scholar] [CrossRef] [Green Version]
- Baerlocher, P.; Boulic, R. Task-priority formulations for the kinematic control of highly redundant articulated structures. In Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems. Innovations in Theory, Practice and Applications (Cat. No.98CH36190), Victoria, BC, Canada, 17 October 1998; Volume 1, pp. 323–329. [Google Scholar]
- Leigeois, A. Automatic Supervisory Control of the Configuration and Behavior of Multibody Mechanisms. IEEE Trans. Syst. Man, Cybern. 1977, SMC-7, 868–871. [Google Scholar]
- Dubey, R.V.; Euler, J.A.; Babcock, S.M. An efficient gradient projection optimization scheme for a seven-degree-of-freedom redundant robot with spherical wrist. In Proceedings of the 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 28–36. [Google Scholar]
- Bishop, B.E.; Stilwell, D.J. On the application of redundant manipulator techniques to the control of platoons of autonomous vehicles. In Proceedings of the 2001 IEEE International Conference on Control Applications (CCA’01) (Cat. No.01CH37204), Mexico City, Mexico, 7 September 2001; pp. 823–828. [Google Scholar]
- Bishop, B.E. On the use of redundant manipulator techniques for control of platoons of cooperating robotic vehicles. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 2003, 33, 608–615. [Google Scholar] [CrossRef]
- Stilwell, D.J.; Bishop, B.E.; Sylvester, C.A. Redundant manipulator techniques for partially decentralized path planning and control of a platoon of autonomous vehicles. IEEE Trans. Syst. Man Cybern. Part B 2005, 35, 842–848. [Google Scholar] [CrossRef] [PubMed]
- Antonelli, G.; Chiaverini, S. Kinematic control of a platoon of autonomous vehicles. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 1464–1469. [Google Scholar]
- Antonelli, G.; Chiaverini, S. Obstacle Avoidance for a Platoon of Autonomous Underwater Vehicles. IFAC Proc. Vol. 2003, 36, 115–120. [Google Scholar] [CrossRef]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics: Modelling, Planning and Control; Springer: London, UK, 2009. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Laranjeira, M.; Dune, C.; Hugel, V. Catenary-based visual servoing for tethered robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 732–738. [Google Scholar]
- Seriani, S.; Gallina, P.; Wedler, A. A modular cable robot for inspection and light manipulation on celestial bodies. Acta Astronaut. 2016, 123, 145–153. [Google Scholar] [CrossRef]
- Žlajpah, L.; Petrič, T. Obstacle Avoidance for Redundant Manipulators as Control Problem. In Serial and Parallel Robot Manipulators; Kucuk, S., Ed.; IntechOpen: Rijeka, Croatia, 2012; Chapter 11. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.; Wu, H.; Chen, B.; Jiang, Y.; Yan, C. Obstacle Avoidance Algorithm for 7-DOF Redundant Anthropomorphic Arm. J. Control. Sci. Eng. 2015, 2015, 1–9. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | a | d | ||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 0 | 0 | ||
| 6 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caruso, M.; Gallina, P.; Seriani, S. On the Modelling of Tethered Mobile Robots as Redundant Manipulators. Robotics 2021, 10, 81. https://doi.org/10.3390/robotics10020081
Caruso M, Gallina P, Seriani S. On the Modelling of Tethered Mobile Robots as Redundant Manipulators. Robotics. 2021; 10(2):81. https://doi.org/10.3390/robotics10020081
Chicago/Turabian StyleCaruso, Matteo, Paolo Gallina, and Stefano Seriani. 2021. "On the Modelling of Tethered Mobile Robots as Redundant Manipulators" Robotics 10, no. 2: 81. https://doi.org/10.3390/robotics10020081
APA StyleCaruso, M., Gallina, P., & Seriani, S. (2021). On the Modelling of Tethered Mobile Robots as Redundant Manipulators. Robotics, 10(2), 81. https://doi.org/10.3390/robotics10020081