
A Simulation Study of a Planar Cable-Driven Parallel Robot to Transport Supplies for Patients with Contagious Diseases in Health Care Centers

 ,
,  , ,
, ,  ,
,  and
and 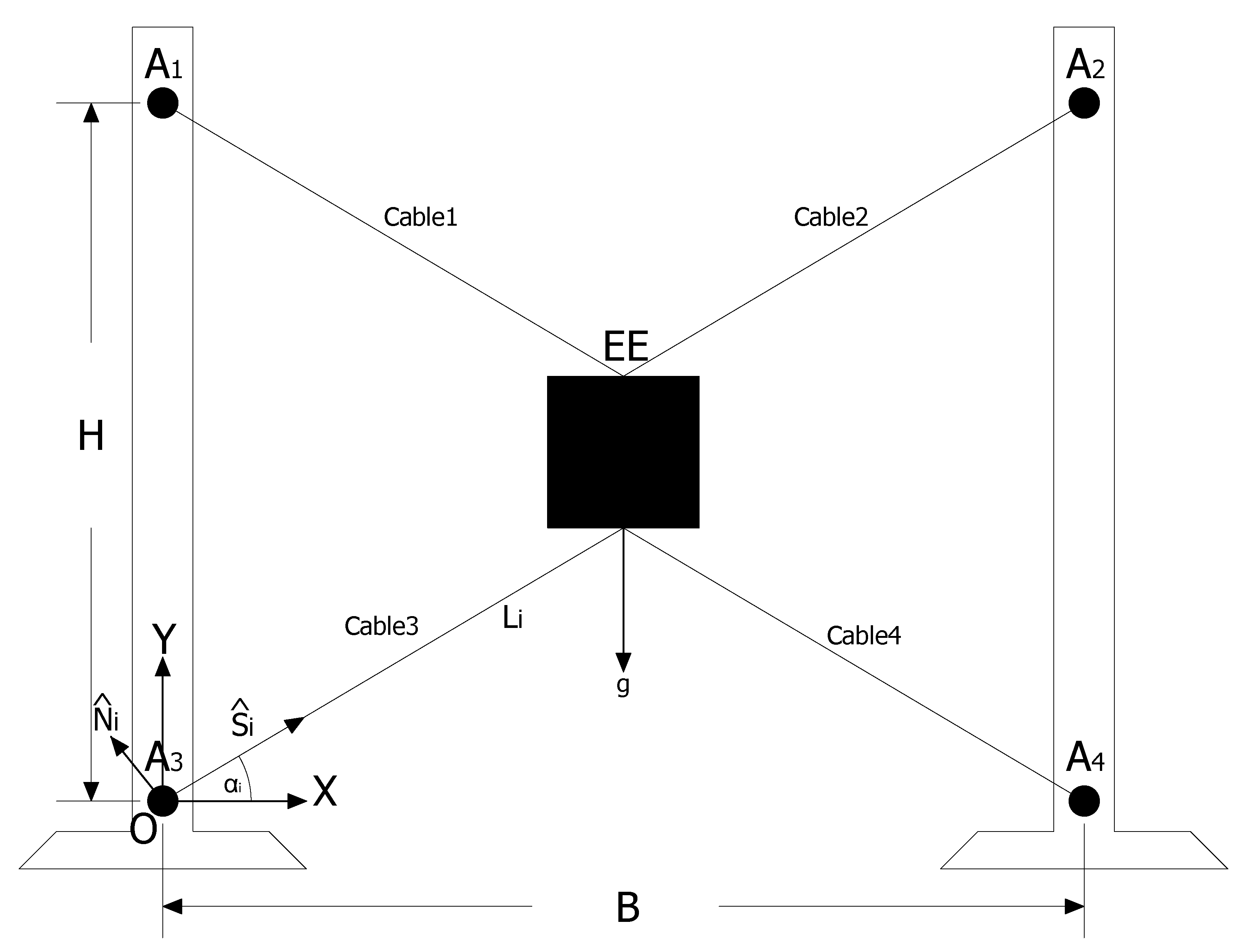{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Implementations in large surfaces of movementIn [7], the use of a scalable robot applied to the construction and/or maintenance of building facades is proposed. The study includes a prototype of the cable-driven robot, a prototype of the wall facade and a prototype of a building. In [8], the design concepts and optimized geometries of a planar CDPR applied to the storage of goods in racks are presented. Simulations of the system are also developed, and the potential use of the robot for precise loading and unloading of containers is analyzed. In [9], a study of logistics robots in the industry is presented, showing a lack of applications based on CDPR. The Technological Readiness Level (TRL) is used as rank index to classify current projects using CDPR in storage applications. The TRL index goes from 1 (for technology in a stage of initial research) to 9 (for technology working in an operational system). For the twelve cases analyzed, the highest TRL rank identified by the authors is 5/6.
- Planning of trajectoriesAn important aspect in robotics is trajectory planning, which can be treated with different approaches. For example, in [10], a distributed route planning method for multiple robots using Lagrangian decomposition technique is proposed, which allows travel of the robots without collision and deadlock. In [11], a space-time network is proposed to map the robot constraints in the route planning framework and to generate collision-free routes of the multi-robot system. On the other hand, in [12], a 6-1-6 polynomial trajectory planner is proposed to allow the movement of a CDPR, which simulates underwater conditions in an underwater humanoid robot.
- Disinfection using Ultraviolet-C lightEfficiency and simplicity have a great influence when choosing the best method for the disinfection of materials. The ultraviolet light disinfection technique has been reported in numerous research papers, some of which describe its characteristics and advantages. In [13], a device with Ultraviolet-C (UV-C) light is used to disinfect mobile phones. The disinfection cycle lasts 30 s, after which a reduction of pathogenic and total bacteria in a range of 90–99% is achieved. In [14], a low-cost sterilizer box using UV light is proposed as protection against COVID-19. In [15], the efficacy between UV-C light, with a wavelength of 254 nm, and pulsed xenon ultraviolet (PX-UV) light, with a wavelength between 100 and 280 nm, is compared in hospital rooms at a distance of 1.2 m from the objective to be disinfected, determining that the UV-C efficiency is greater. Another example can be found in [16], where the design of a device that is placed as a wrist strap is presented for the disinfection of hands and held objects. A control system is integrated into the UV-C emitter head, which regulates the intensity and duration of the UV-C radiation. On the other hand, in [17], a complete study about the advantages and limitations of UV-C radiation applied to the disinfection of foods is presented.
2. Materials and Methods
2.1. Mechanical Structure of the Proposed Planar CDPR
- A1, A2, A3 and A4: cable guide pulleys and anchor points on fixed structure;
- EE: end effector;
- B: robot base defined by the horizontal distance between pulleys;
- H: robot height defined by the vertical distance between pulleys.
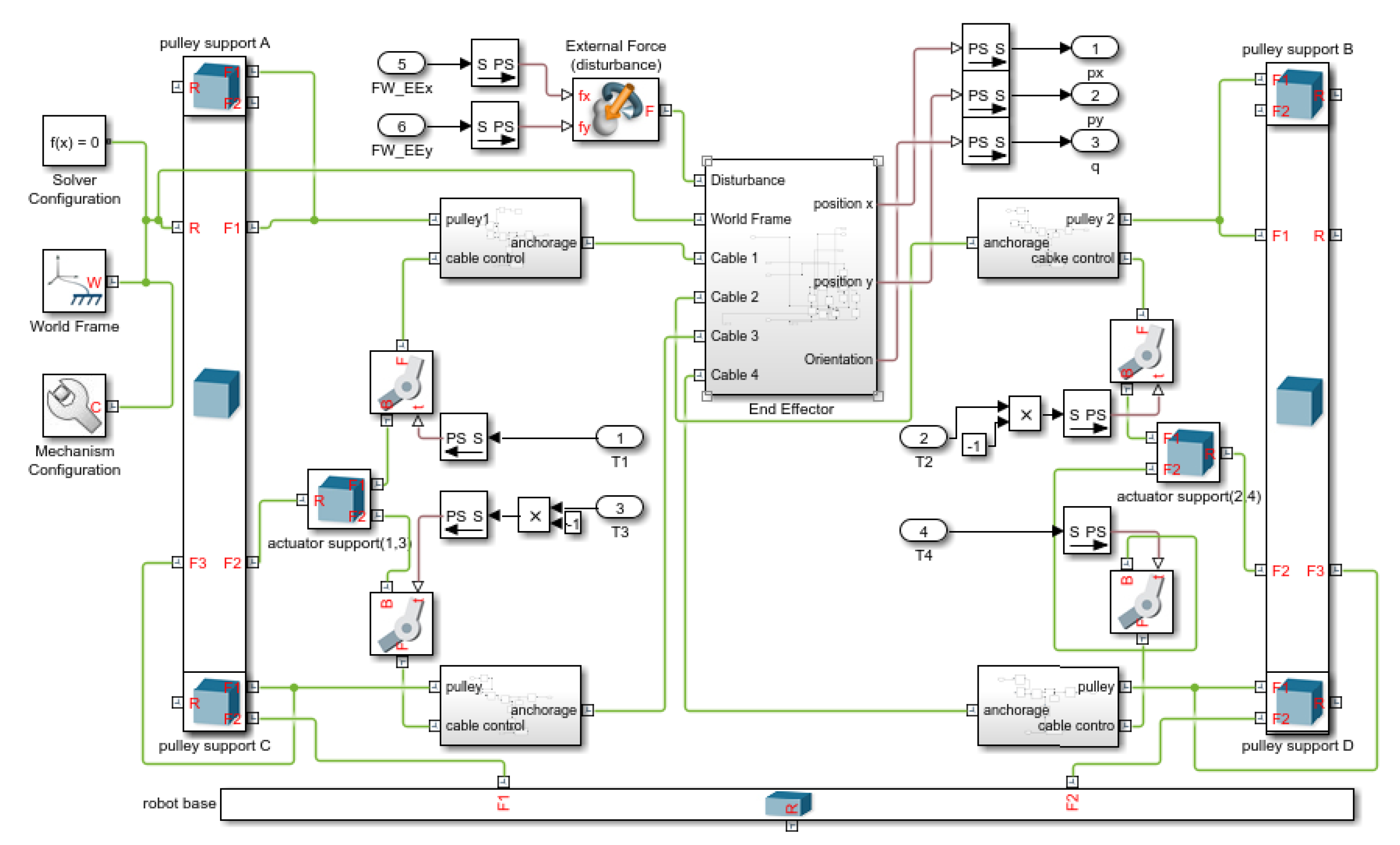
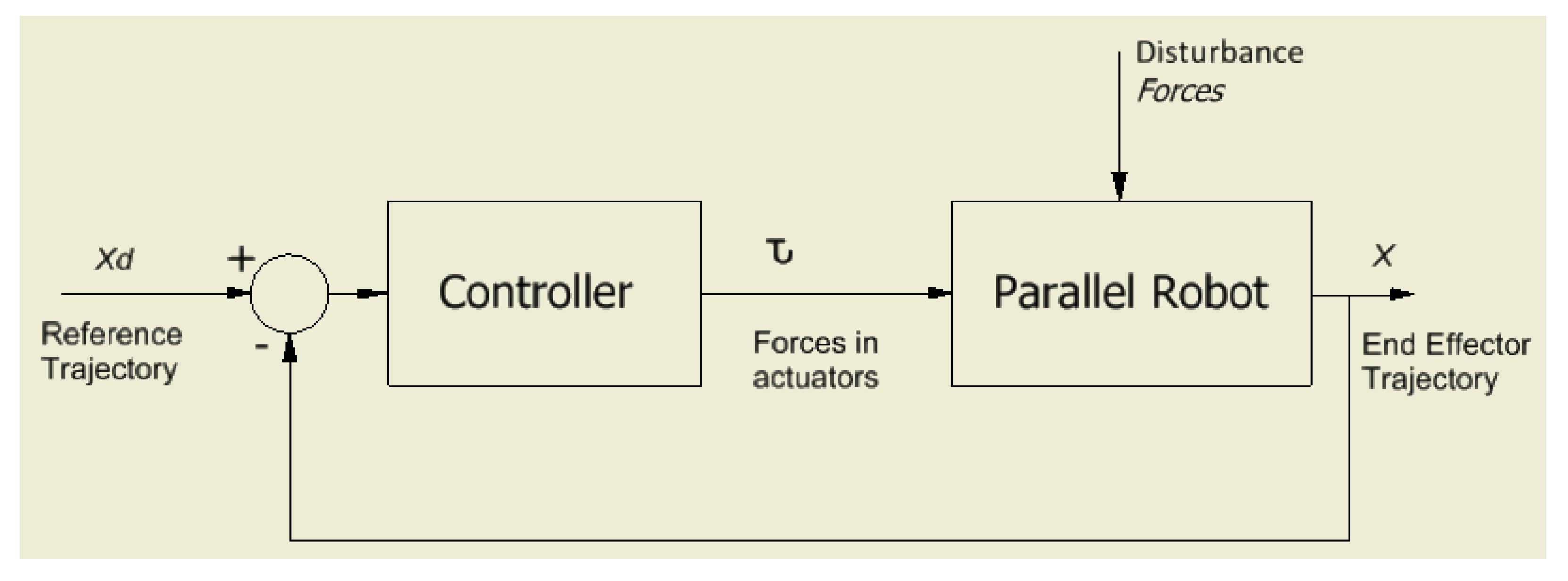
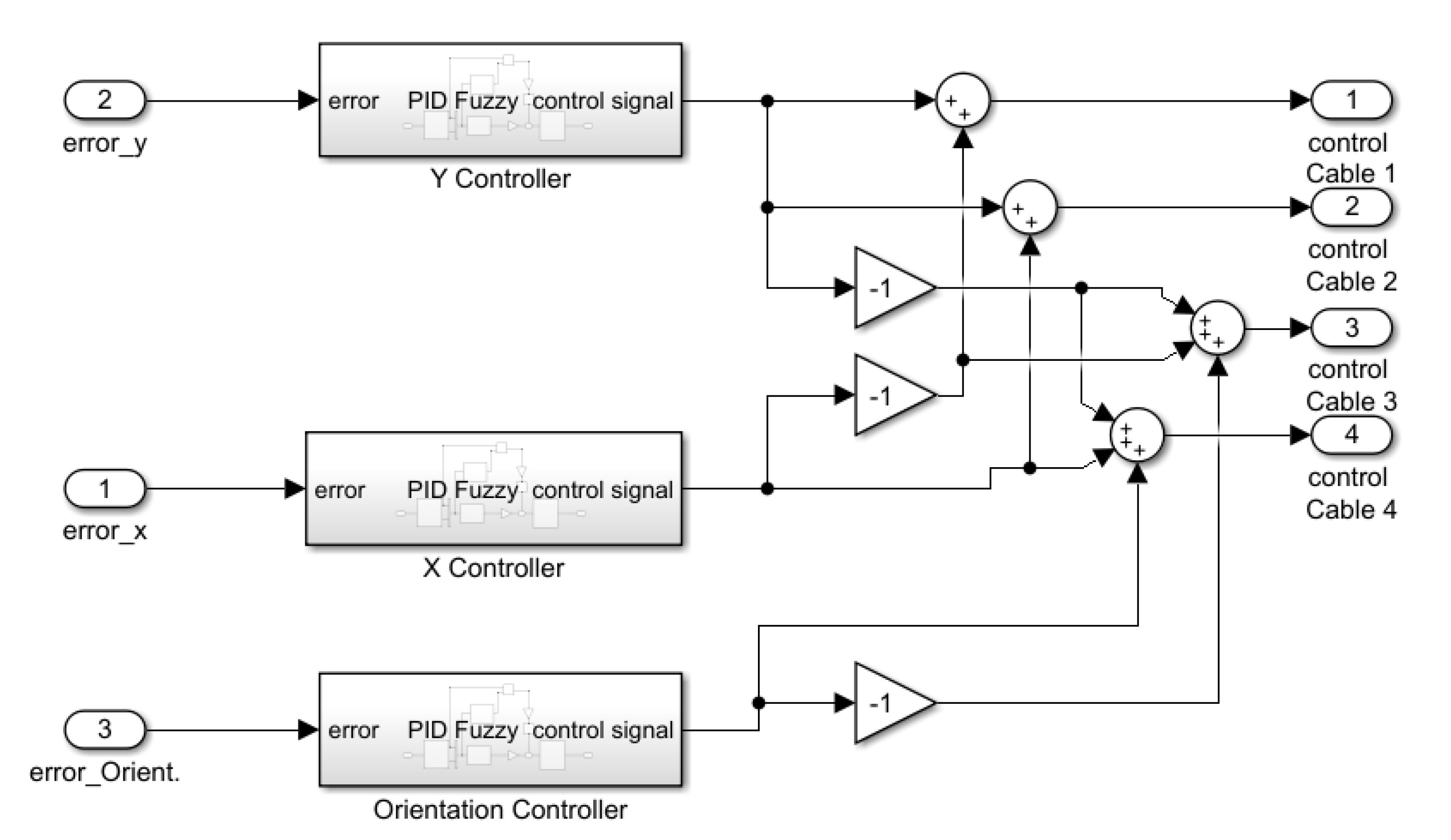
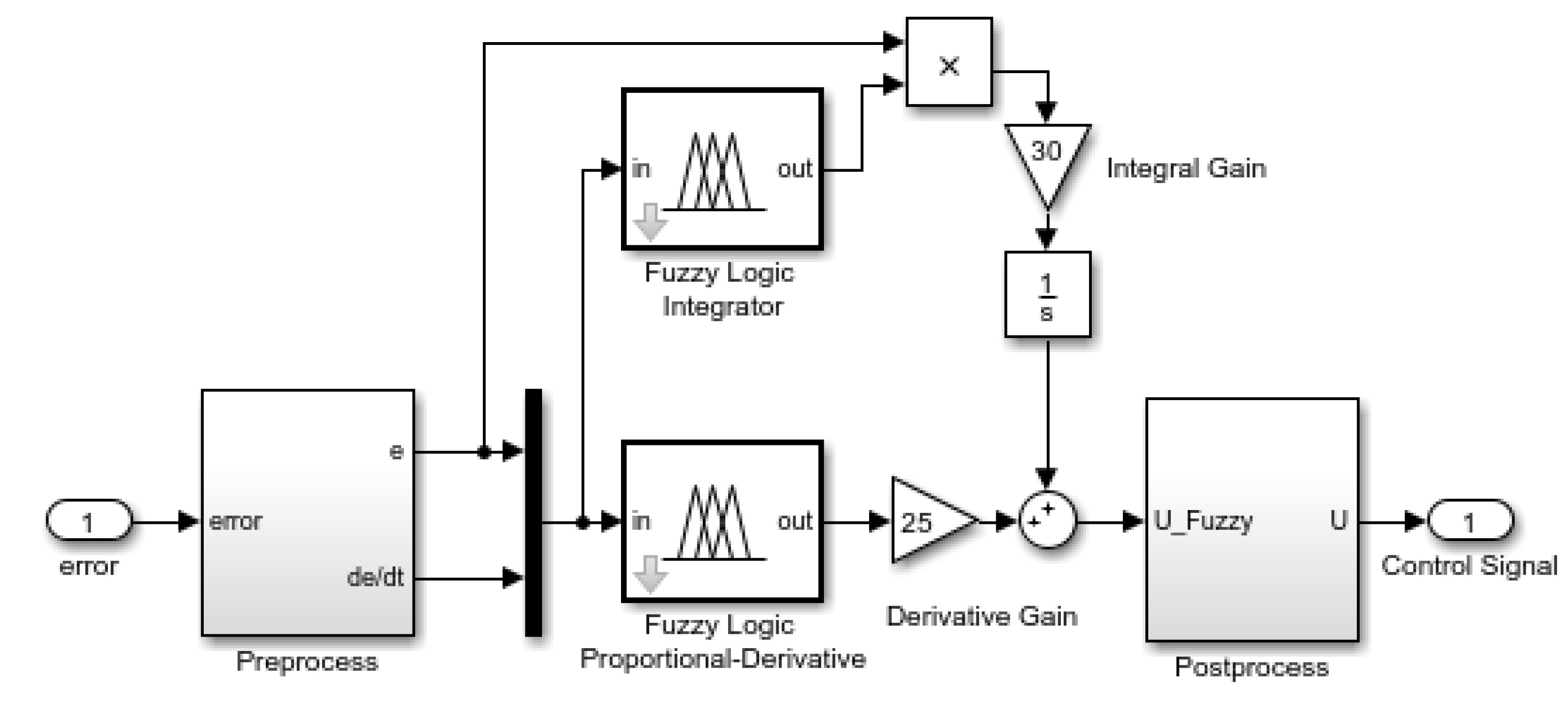
2.2. Position Control Topology
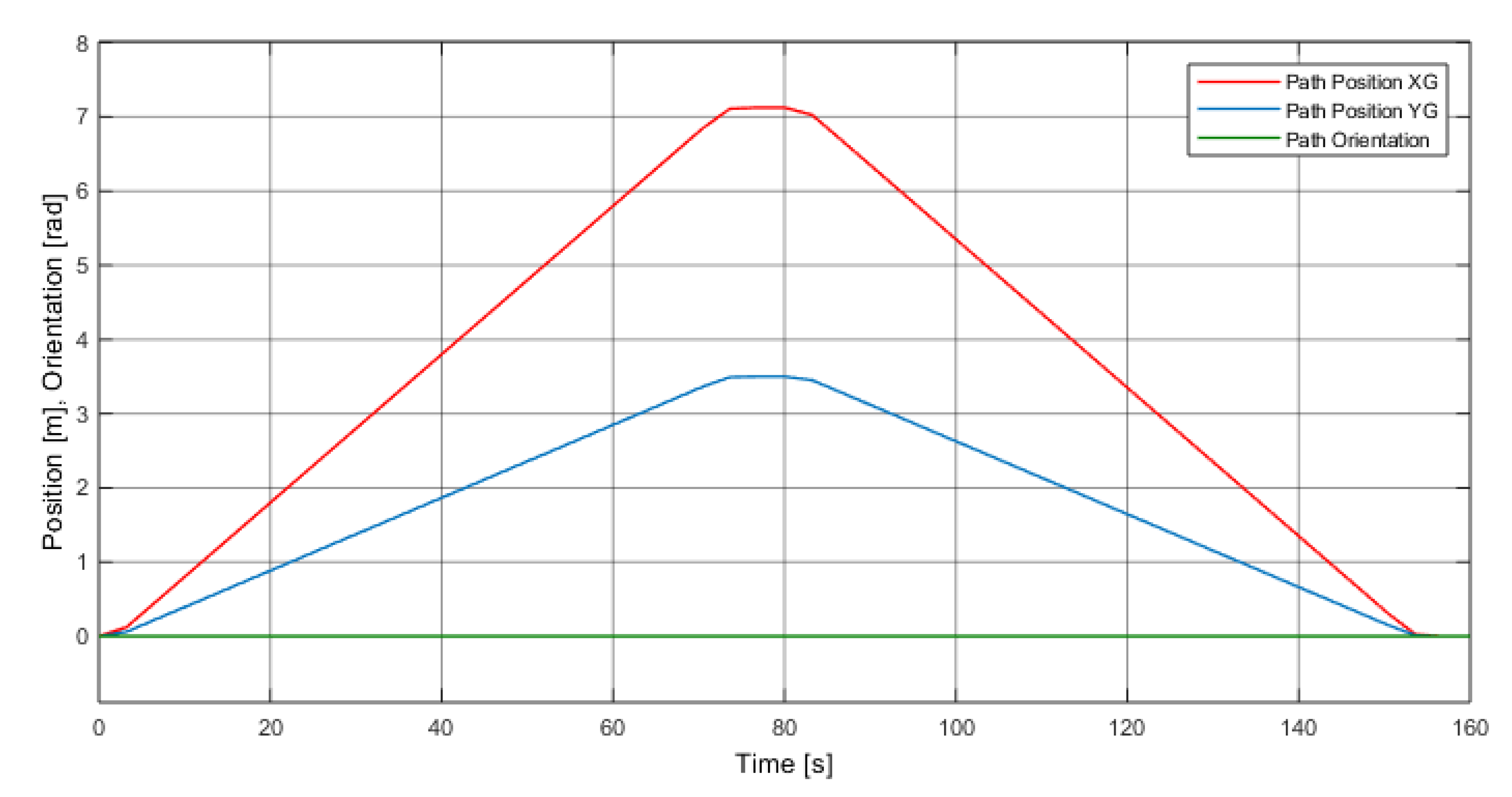
2.3. Trajectory Planning
- , and : positions reached during the sections of acceleration, constant speed and deceleration, respectively;
- : maximum speed that can be developed;
- : acceleration and deceleration time;
- : total time required to develop the whole trajectory.
- Maximum speed to be developed in the EE of the robot, which will be related with the dimensioning of the actuators;
- Time required for the disinfection of the transported supplies;
- Distance between the supply point and the target room.
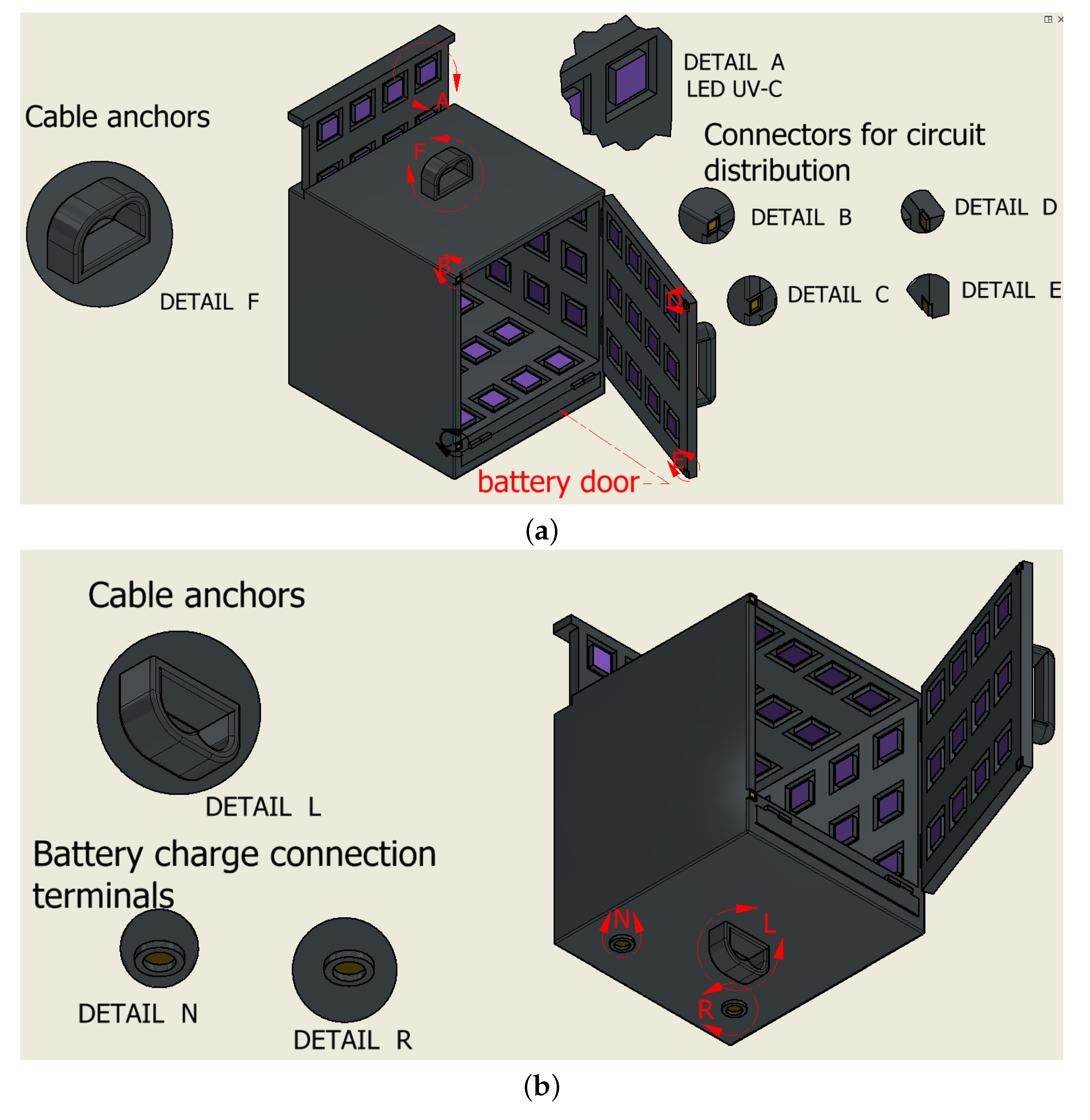
2.4. Structure of the Disinfection System
3. Results
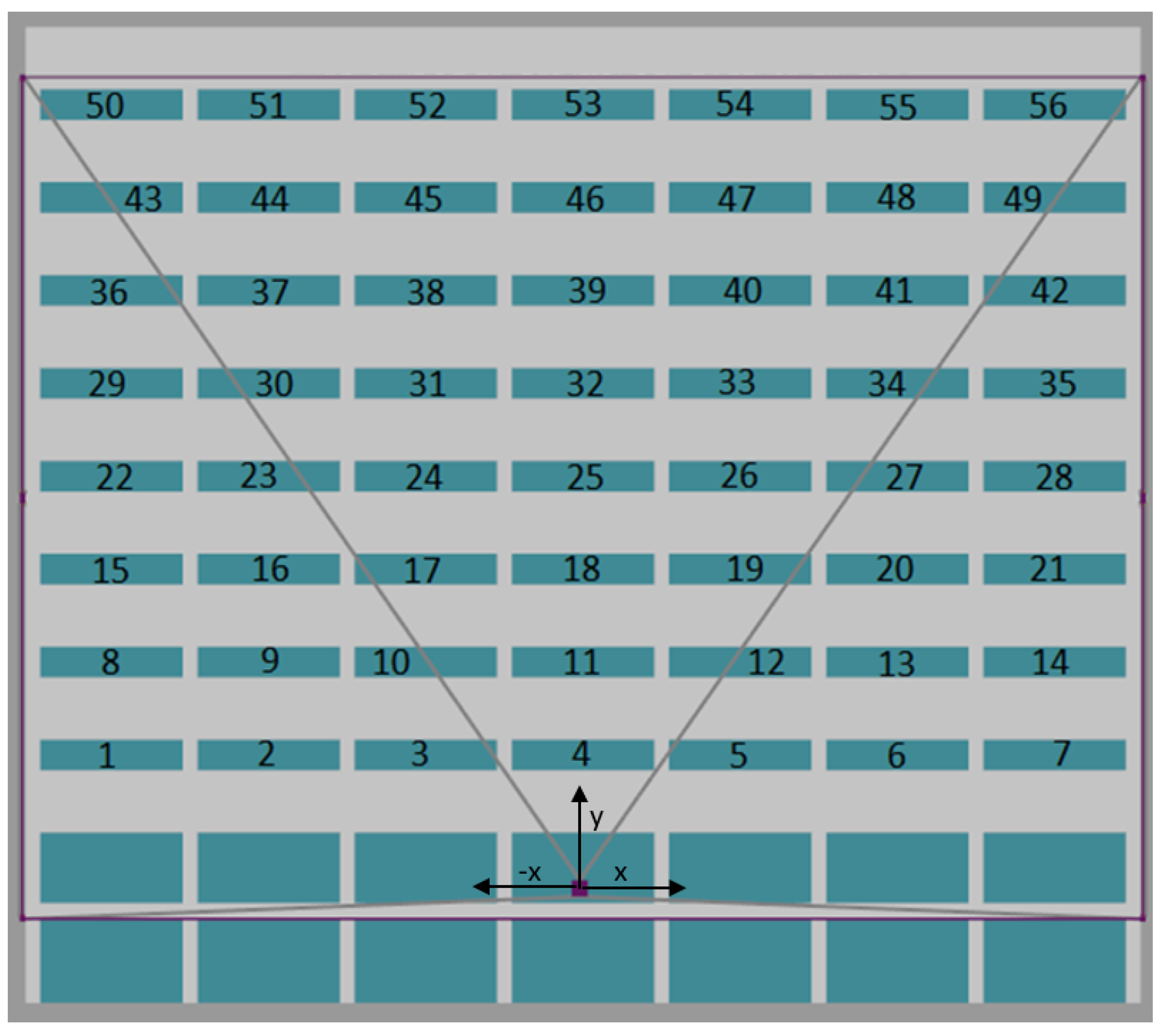
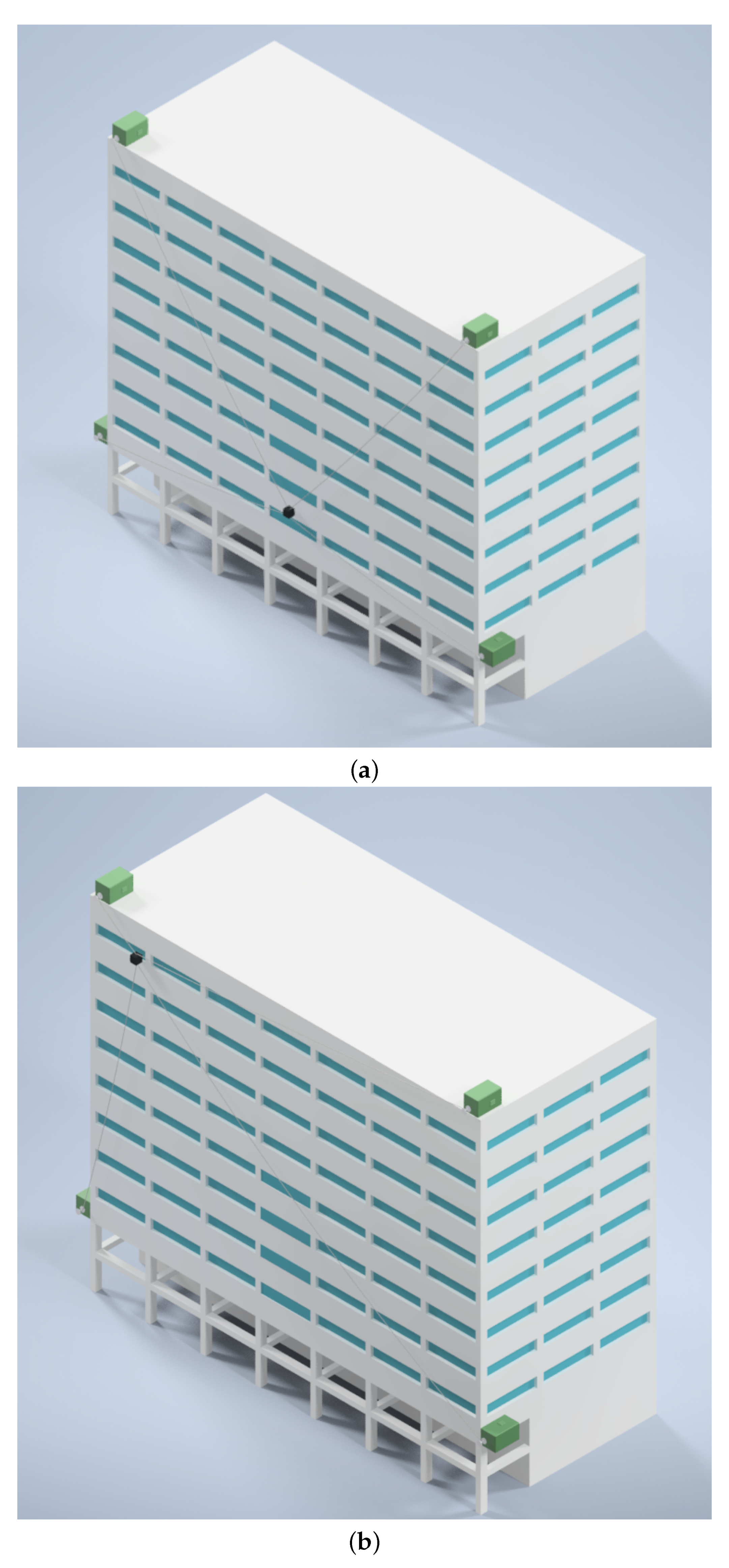
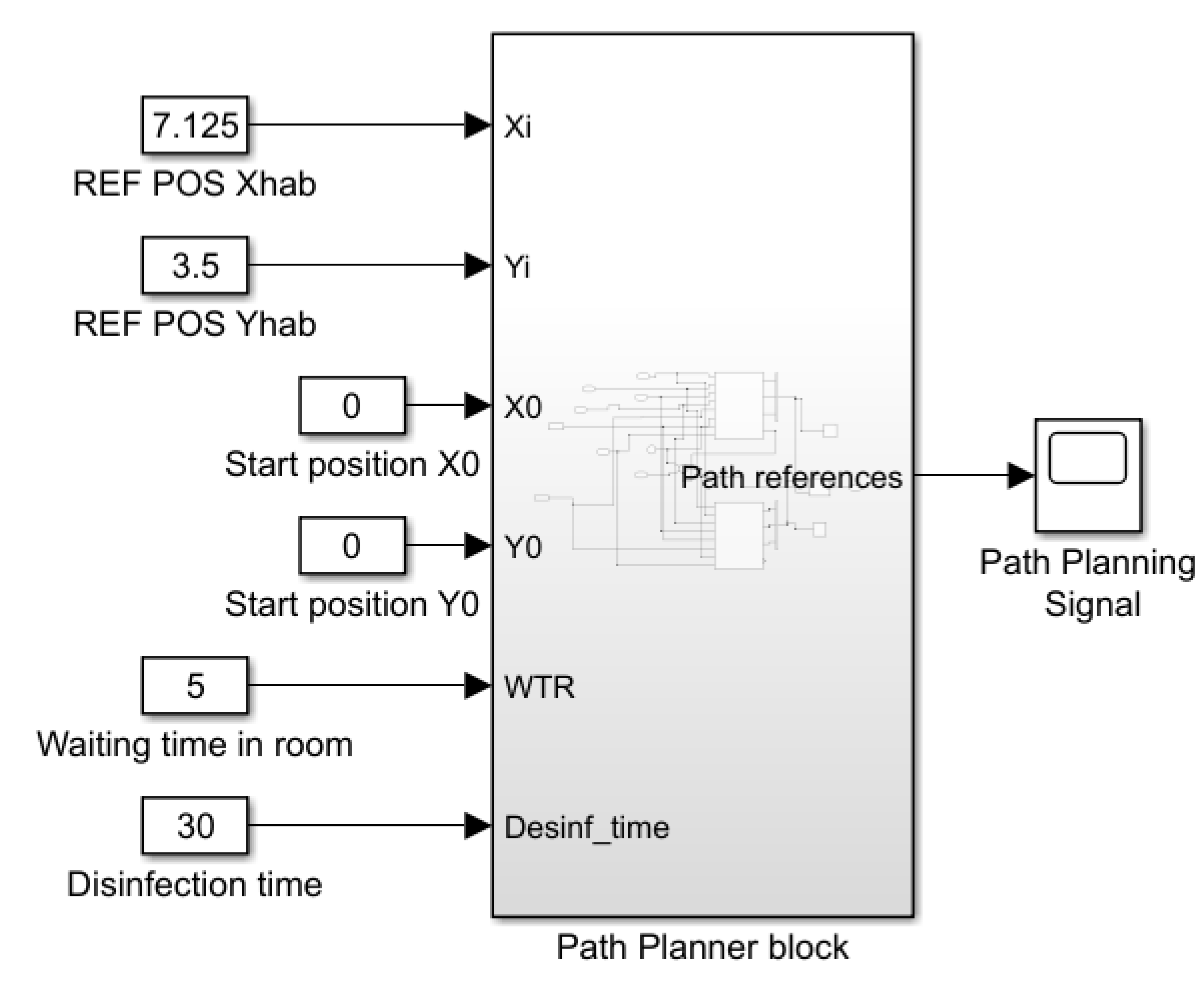
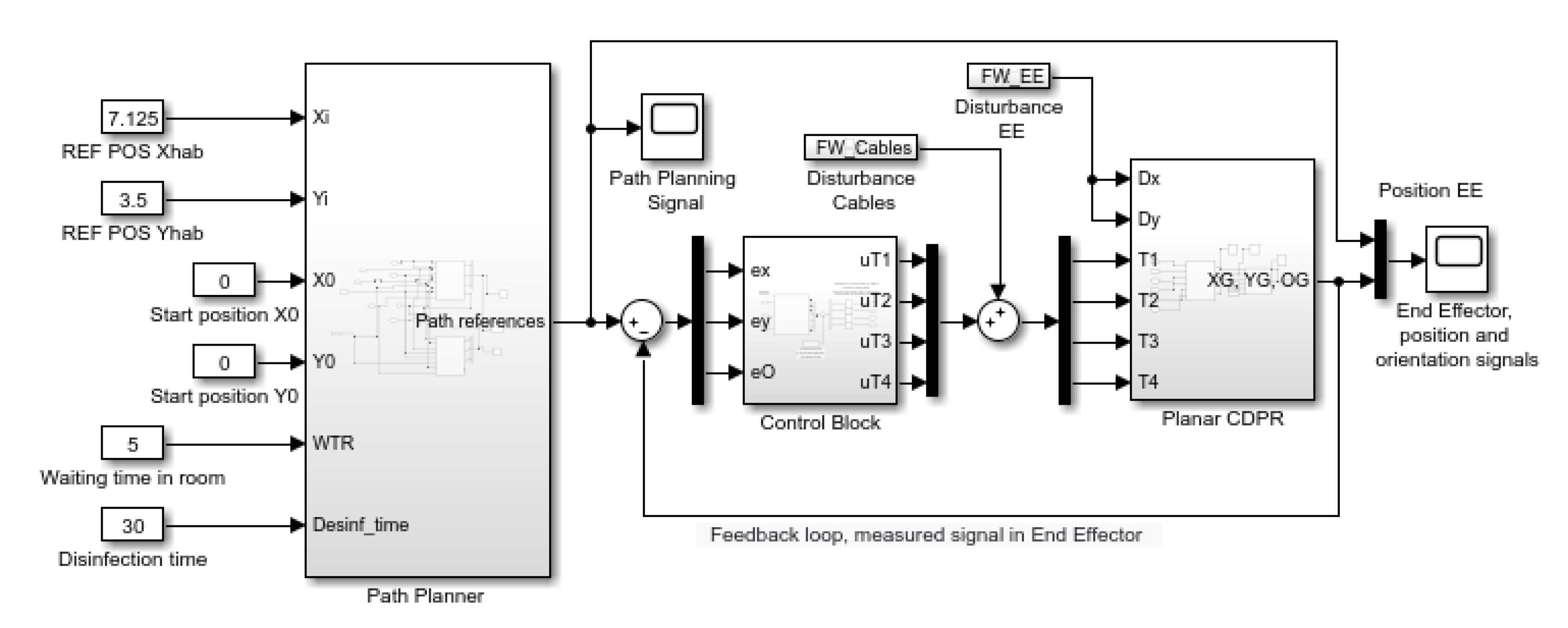
General Process of Operation of the Robot during the Transport of Supplies
- Starting point of the route: corresponds to the coordinates of the supply point where the EE receives the load to be transported.
- Destination point: refers to the position of the room where the transported supplies will be delivered.
- Disinfection time: corresponds to the time in which the disinfection system must act; this time is included within the movement time of the robot, being able to affect its movement speed to guarantee the required time of exposure to UV-C light.
- Waiting time in room: allows supplies to be collected and/or deposited by the user within the EE.
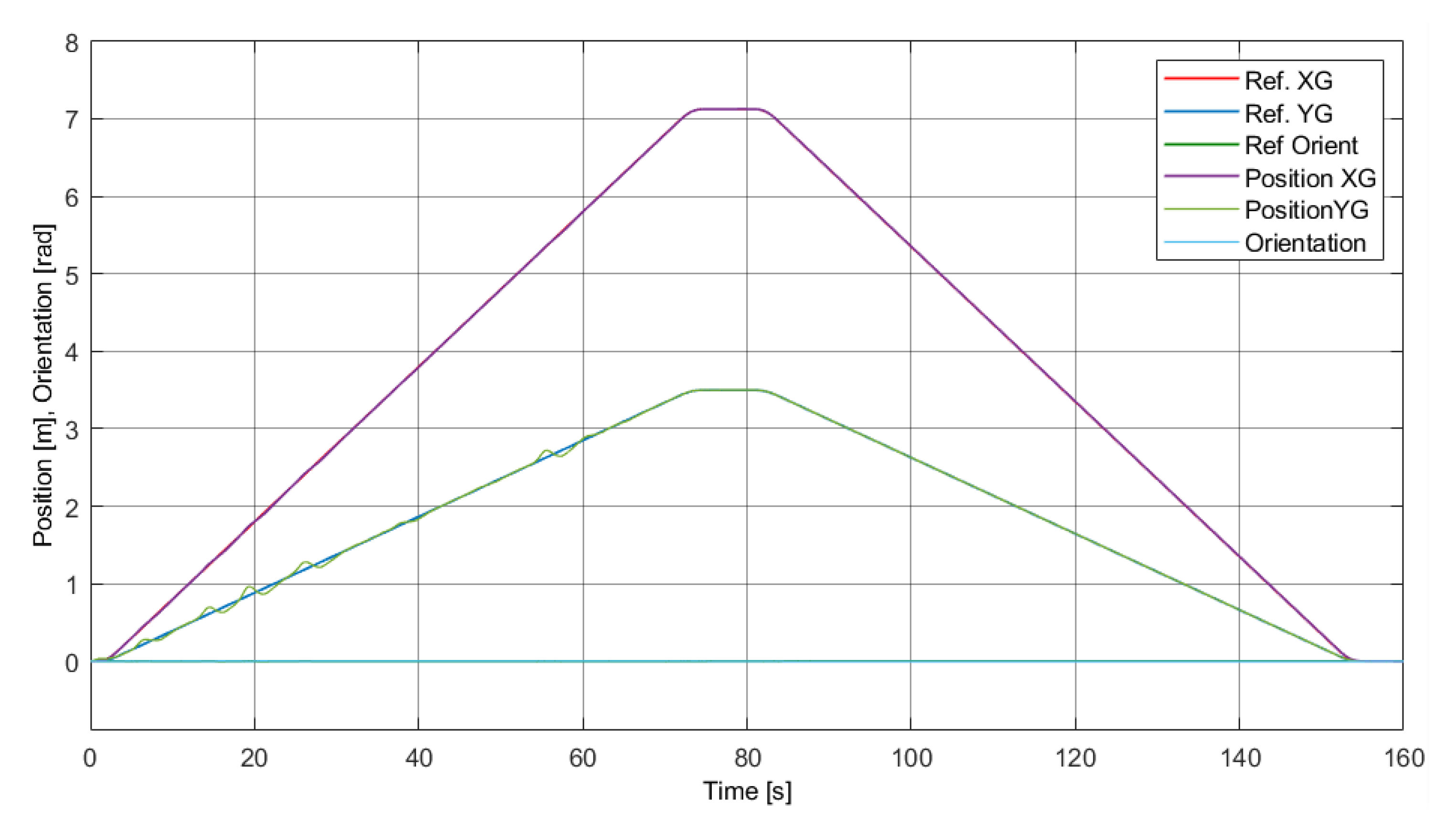
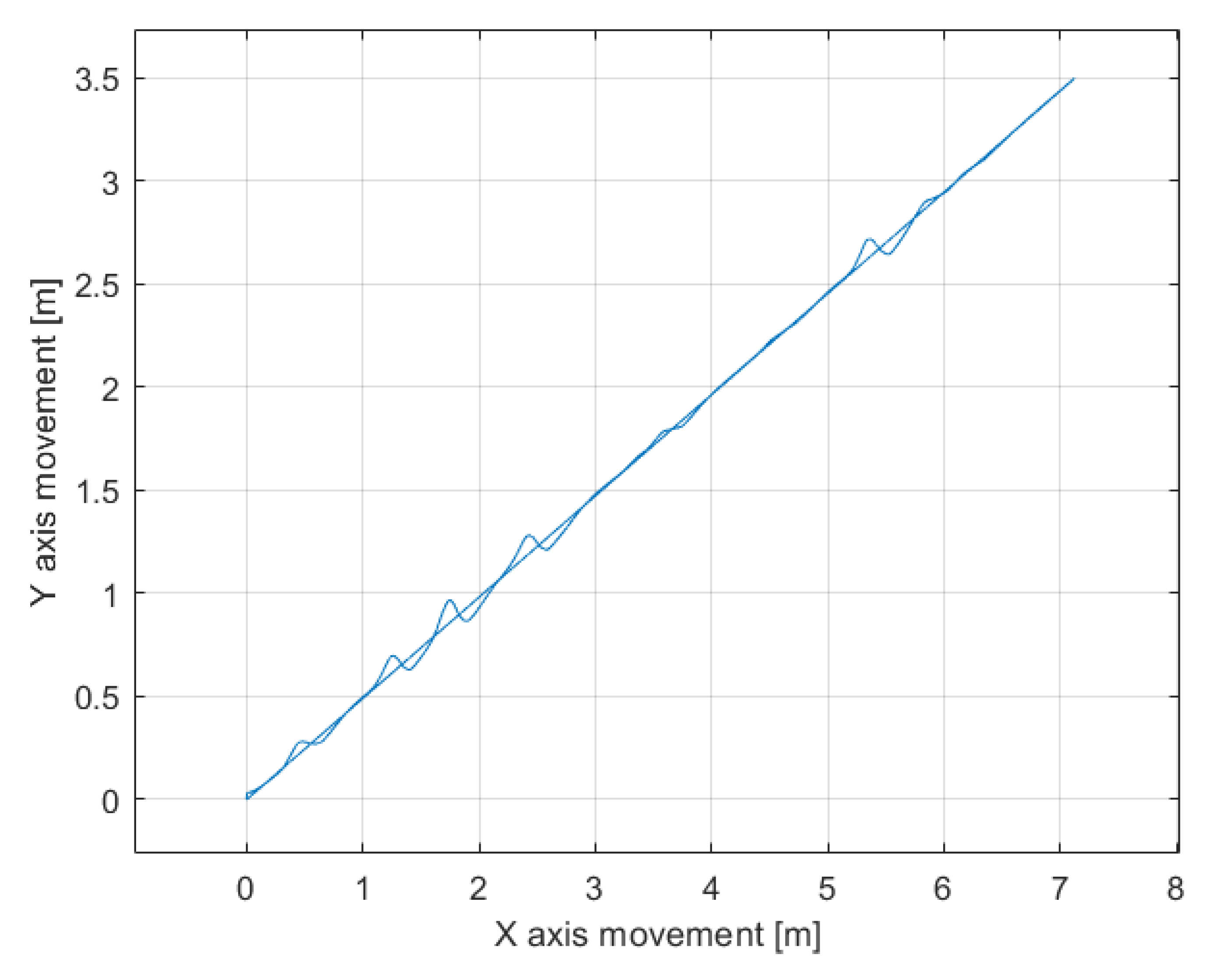
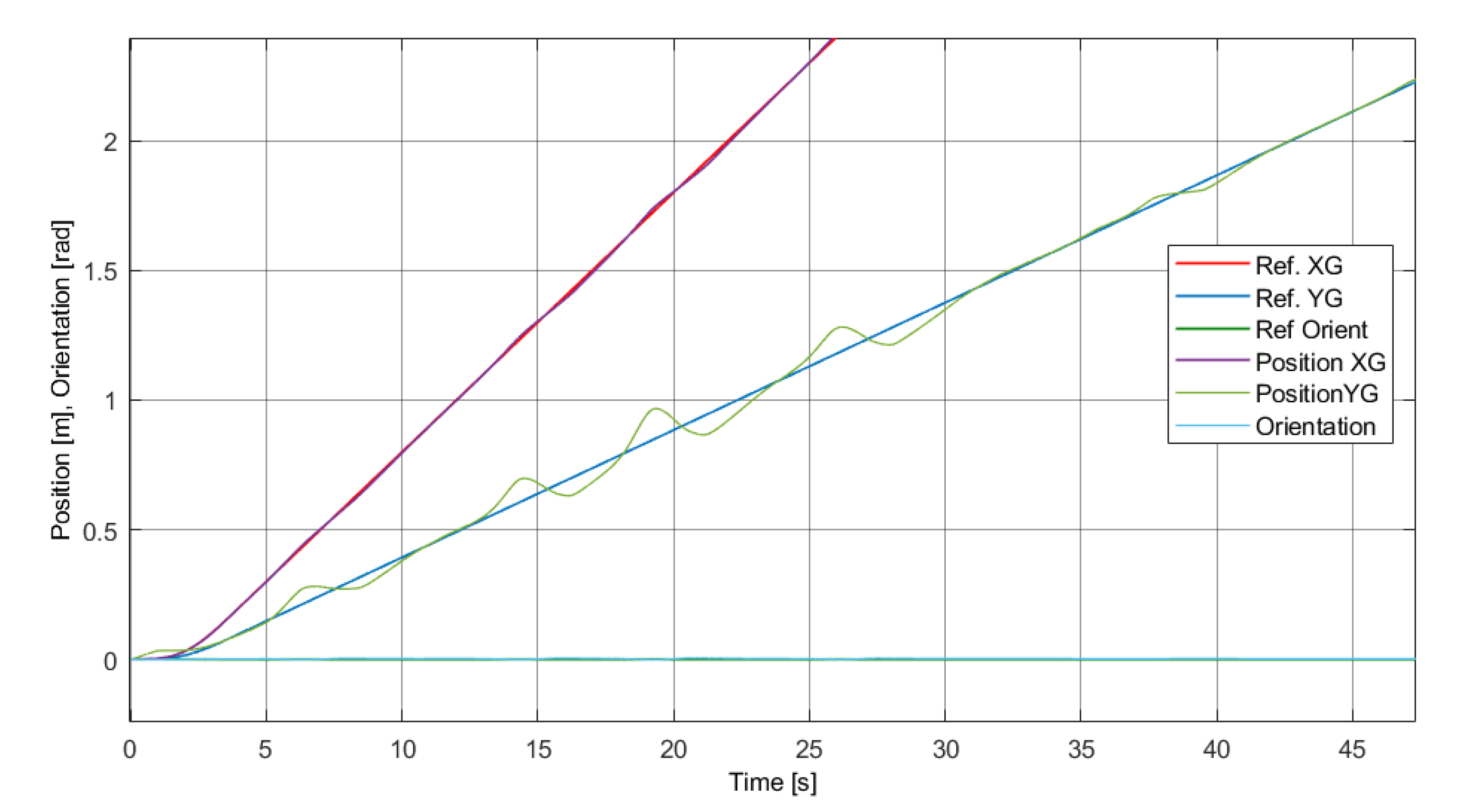
- Starting point of the route: [] = [0 m, 0 m], which is set in the bottom center of the facade.
- Destination point: [] = [7.125 m, 3.5 m] considering room 6 as an example.
- Disinfection time: 30 s based on [13].
- Waiting time in room: 5 s.
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pani, A.; Mishra, S.; Golias, M.; Figliozzi, M. Evaluating public acceptance of autonomous delivery robots during COVID-19 pandemic. Transp. Res. Part Transp. Environ. 2020, 89, 102600. [Google Scholar] [CrossRef]
- Abrar, M.M.; Islam, R.; Shanto, M.A.H. An Autonomous Delivery Robot to Prevent the Spread of Coronavirus in Product Delivery System. In Proceedings of the 2020 11th IEEE Annual Ubiquitous Computing, Electronics and Mobile Communication Conference, UEMCON 2020, New York, NY, USA, 28–31 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 0461–0466. [Google Scholar] [CrossRef]
- Sathyamoorthy, A.J.; Patel, U.; Savle, Y.A.; Paul, M.; Manocha, D. COVID-Robot: Monitoring Social Distancing Constraints in Crowded Scenarios. arXiv 2020, arXiv:2008.06585. [Google Scholar]
- Kim, M.C.; Kim, E.S.; Park, J.O.; Choi, E.; Kim, C.S. Robotic Localization Based on Planar Cable Robot and Hall Sensor Array Applied to Magnetic Capsule Endoscope. Sensors 2020, 20, 5728. [Google Scholar] [CrossRef] [PubMed]
- Abbasnejad, G.; Yoon, J.; Lee, H. Optimum kinematic design of a planar cable-driven parallel robot with wrench-closure gait trajectory. Mech. Mach. Theory 2016, 99, 1–18. [Google Scholar] [CrossRef]
- Jin, X.; Jun, D.I.; Jin, X.; Seon, J.; Pott, A.; Park, S.; Park, J.O.; Ko, S.Y. Upper limb rehabilitation using a planar cable-driven parallel robot with various rehabilitation strategies. In Mechanisms and Machine Science; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2015; Volume 32, pp. 307–321. [Google Scholar] [CrossRef]
- Elia, L.; Alonso, R.; Cañada, J. HEPHAESTUS—Highly Automated Physical Achievements and Performances Using Cable Robots Unique Systems. Proceedings 2018, 2, 558. [Google Scholar] [CrossRef] [Green Version]
- Bruckmann, T.; Lalo, W.; Nguyen, K.; Salah, B. Development of a storage retrieval machine for high racks using a wire robot. In Proceedings of the ASME Design Engineering Technical Conference; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2012; Volume 4, pp. 771–780. [Google Scholar] [CrossRef]
- Alias, C.; Nikolaev, I.; Magallanes, E.G.C.; Noche, B. An Overview of Warehousing Applications based on Cable Robot Technology in Logistics. In Proceedings of the 2018 IEEE International Conference on Service Operations and Logistics, and Informatics, SOLI 2018, Singapore, 31 July–2 August 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 232–239. [Google Scholar] [CrossRef]
- Nishi, T.; Ando, M.; Konishi, M.; Imai, J. A Distributed Route Planning Method for Multiple Mobile Robots Using Lagrangian Decomposition Technique. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 3855–3861. [Google Scholar] [CrossRef]
- Xin, J.; Meng, C.; Schulte, F.; Peng, J.; Liu, Y.; Negenborn, R.R. A Time-Space Network Model for Collision-Free Routing of Planar Motions in a Multirobot Station. IEEE Trans. Ind. Inform. 2020, 16, 6413–6422. [Google Scholar] [CrossRef]
- Barroso, A.R.; Saltaren, R.; Portilla, G.; Cely, J.S.; Carpio, M. Smooth Path Planner for Dynamic Simulators Based on Cable-Driven Parallel Robots. In Proceedings of the International Conference on Smart Systems and Technologies 2018, SST 2018, Osijek, Croatia, 10–12 October 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 145–150. [Google Scholar] [CrossRef]
- Malhotra, S.; Wlodarczyk, J.; Kuo, C.; Ngo, C.; Glucoft, M.; Sumulong, I.; Smit, M.A.; Bender, J.M. Shining a light on the pathogenicity of health care providers’ mobile phones: Use of a novel ultraviolet-C wave disinfection device. Am. J. Infect. Control 2020, 48, 1370–1374. [Google Scholar] [CrossRef] [PubMed]
- Santhosh, R.; Yadav, S. Low Cost Multipurpose UV-C Sterilizer Box for Protection Against COVID’19. In Proceedings of the 2021 International Conference on Artificial Intelligence and Smart Systems (ICAIS), Coimbatore, India, 25–27 March 2021; pp. 1495–1498. [Google Scholar] [CrossRef]
- Nerandzic, M.M.; Thota, P.; Sankar C, T.; Jencson, A.; Cadnum, J.L.; Ray, A.J.; Salata, R.A.; Watkins, R.R.; Donskey, C.J. Evaluation of a pulsed xenon ultraviolet disinfection system for reduction of healthcare-associated pathogens in hospital rooms. Infect. Control Hosp. Epidemiol. 2015, 36, 192–197. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- El Majid, B.; Motahhir, S.; El Hammoumi, A.; Lebbadi, A.; El Ghzizal, A. Preliminary Design of a Smart Wristband Disinfectant to Help in Covid-19 Fight. Inventions 2020, 5, 32. [Google Scholar] [CrossRef]
- Guerrero-Beltran, J.A.; Barbosa-Canovas, G.V. Advantages and Limitations on Processing Foods by UV Light. Food Sci. Technol. Int. 2004, 10, 137–147. [Google Scholar] [CrossRef]
- Taghirad, H. Parallel Robots: Mechanics and Control, 1st ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Carpio, M.; Saltaren, R.; Viola, J.; Calderon, C.; Guerra, J. Proposal of a Decoupled Structure of Fuzzy-PID Controllers Applied to the Position Control in a Planar CDPR. Electronics 2021, 10, 745. [Google Scholar] [CrossRef]
- Kaur, A.; Kaur, A. Comparison of Mamdani-Type and Sugeno-Type Fuzzy Inference Systems for Air Conditioning System. Int. J. Soft Comput. Eng. IJSCE 2012, 2, 323–325. [Google Scholar]
- Carpio-Alemán, M.; Orozco-Tupacyupanqui, W.; Betancur-Betancur, M. Design and simulation of a fuzzy controller for Vertical Take off and Landing (VTOL) systems. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics and Computing, ROPEC 2016, Zihuatanejo, Mexico, 9–11 November 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ponce, P. Inteligencia Artificial Con Aplicaciones a la Ingeniería, 1st ed.; Alfaomega: Mexico City, Mexico, 2010; pp. 1–376. [Google Scholar]
- Merlet, J. Parallel Robots, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006; p. 402. [Google Scholar]
- Carpio Alemán, M.; Saltaren, R.; Rodriguez, A.; Portilla, G.; Placencia, J. Rotational Workspace Expansion of a Planar CDPR with a Circular End-Effector Mechanism Allowing Passive Reconfiguration. Robotics 2019, 8, 57. [Google Scholar] [CrossRef] [Green Version]
- Dimitriadis, P.; Koutsoyiannis, D. Stochastic synthesis approximating any process dependence and distribution. Stoch. Environ. Res. Risk Assess. 2018, 32, 1493–1515. [Google Scholar] [CrossRef]
- Kelbaliyev, G.I. Drag coefficients of variously shaped solid particles, drops, and bubbles. Theor. Found. Chem. Eng. 2011, 45, 248–266. [Google Scholar] [CrossRef]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carpio, M.; Saltaren, R.; Viola, J.; García, C.; Guerra, J.; Cely, J.; Calderón, C. A Simulation Study of a Planar Cable-Driven Parallel Robot to Transport Supplies for Patients with Contagious Diseases in Health Care Centers. Robotics 2021, 10, 111. https://doi.org/10.3390/robotics10040111
Carpio M, Saltaren R, Viola J, García C, Guerra J, Cely J, Calderón C. A Simulation Study of a Planar Cable-Driven Parallel Robot to Transport Supplies for Patients with Contagious Diseases in Health Care Centers. Robotics. 2021; 10(4):111. https://doi.org/10.3390/robotics10040111
Chicago/Turabian StyleCarpio, Marco, Roque Saltaren, Julio Viola, Cecilia García, Juan Guerra, Juan Cely, and Cristian Calderón. 2021. "A Simulation Study of a Planar Cable-Driven Parallel Robot to Transport Supplies for Patients with Contagious Diseases in Health Care Centers" Robotics 10, no. 4: 111. https://doi.org/10.3390/robotics10040111
APA StyleCarpio, M., Saltaren, R., Viola, J., García, C., Guerra, J., Cely, J., & Calderón, C. (2021). A Simulation Study of a Planar Cable-Driven Parallel Robot to Transport Supplies for Patients with Contagious Diseases in Health Care Centers. Robotics, 10(4), 111. https://doi.org/10.3390/robotics10040111