
A Suite of Robotic Solutions for Nuclear Waste Decommissioning

 , ,
, ,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Robotics Research for the Nuclear Environment—Overview and Applications
An Illustrative Use Case
- -
- A soft eversion robot (see Section 4.3) can enter the building through the small aperture;
- -
- The robot can be equipped with sensors and specific protocols can be employed to inspect the surfaces of the walls and the waste containers, either using touch (see Section 4.2) or a combination of vision and touch (see Section 4.1), to evaluate their structural integrity;
- -
- The robot can be equipped with a gripper (see Section 3.1) to grasp and manipulate objects (see Section 3.2) inside the building;
- -
- The movements of the robot can be controlled by human teleoperation with haptic feedback (see Section 5) or can be programmed to be autonomous (see Section 3.3).
3. Robotic Grasping and Manipulation
3.1. Task-Oriented Design and System Development of a Dexterous Robotic Gripper
3.2. Safe Object Grasping and Manipulation
3.3. A Software Framework for Robot Manipulation
- Robot interfacing—using components widely available online;
- Software and sensor integration—regardless of implementation details;
- Variables definition—to be used during robot execution;
- Task design and execution using integrated components—via a visual drag and drop interface.
- Dragging and dropping states or state machines in the window;
- Configuring each state;
- Amalgamating the outcomes of the various elements to define the behaviour of the robot.
4. Sensors and Sensor Deployment
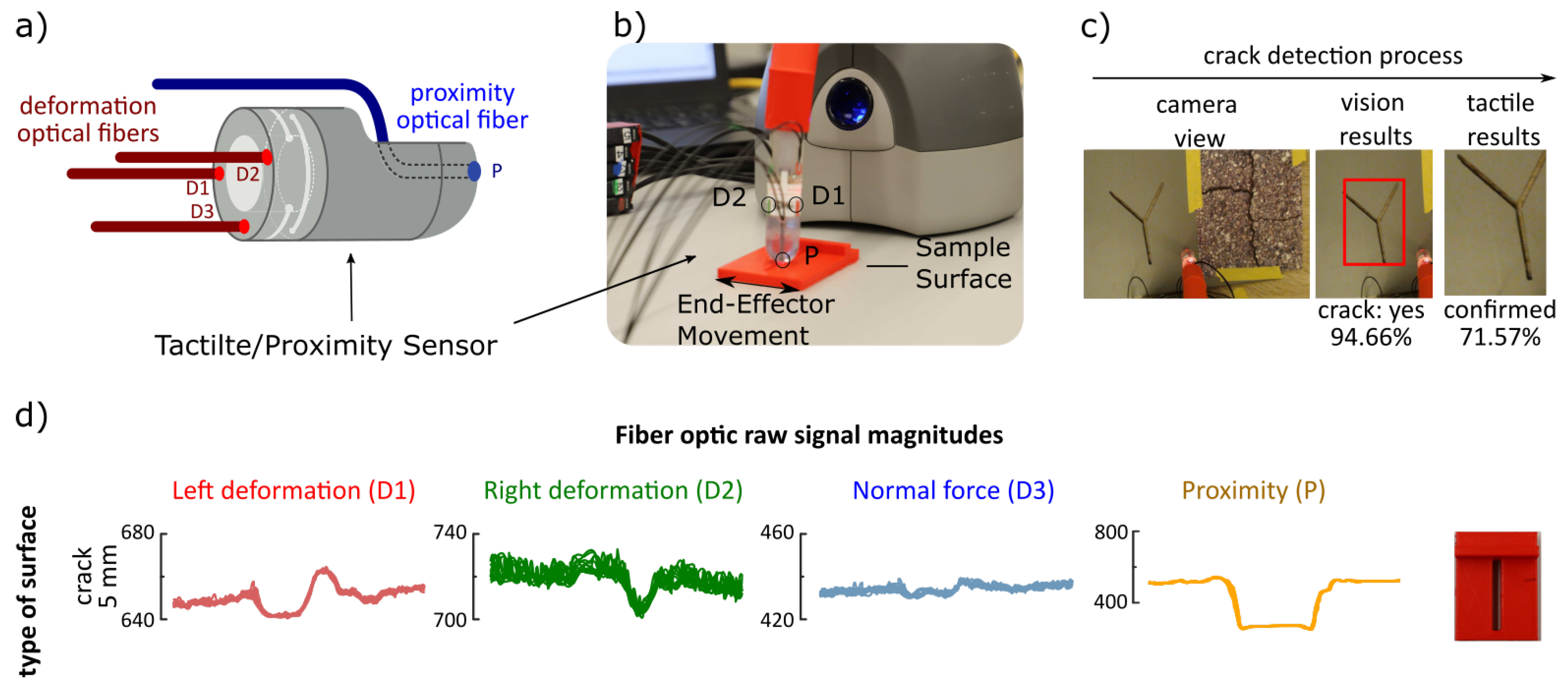
4.1. Using Visual-Tactile Sensing for Surface Inspection
4.2. Surface Characterisation with Highly Sensitive Bio-Inspired Tactile Cilia
4.3. Highly Manoeuvrable Eversion Robot for Sensor Delivery
- (For unknown environments or destinations) Because the tip extends continuously, attaching a gripper or indeed any end-effector to it would enable relevant tasks to be carried out once the target destination is reached.
- (For unknown environments or destinations) The eversion robot has a longitudinal hollow, so once it has extended and reached its target, the sensor can be passed from one end of the robot (base) to the other end of the robot (tip)—as shown in Figure 8.
- (For known environments or destinations) Attaching the sensor to a predetermined position within the body of the robot. Provided we know the precise location of the target, we can place the sensor within the robot at the exact point that will unfold upon reaching that target. In this way the sensor can be deployed to the correct position.
5. Human–Machine Interfaces for Efficient Robot Teleoperation in Extreme Environments
5.1. Virtual Reality-Based Teleoperation
5.2. Haptic Feedback for Robot Teleoperation
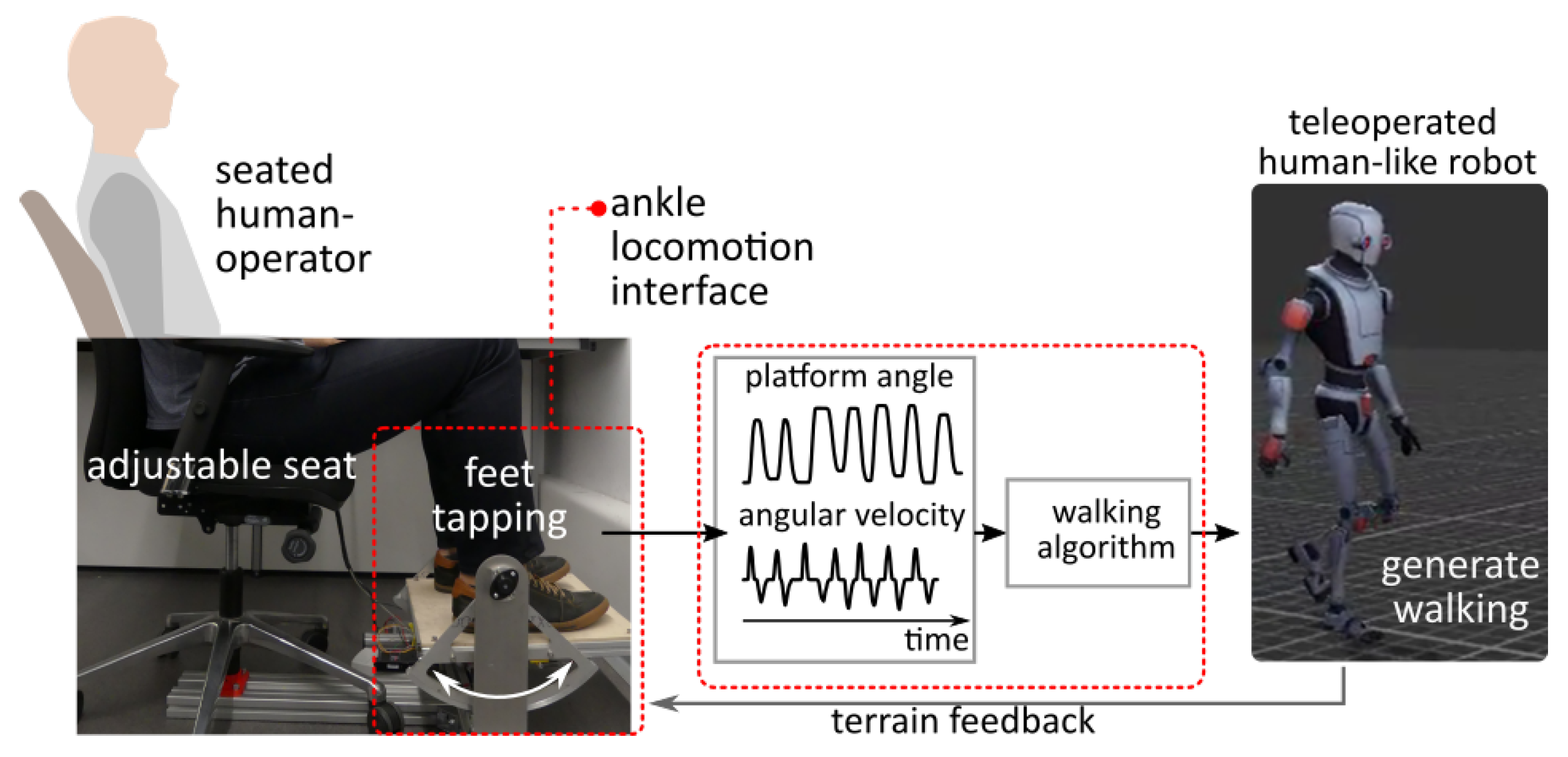
5.3. Teleoperation of Legged and Wheeled Mobile Robots
6. Conclusions and Future Challenges
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of Science Robotics. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef] [PubMed]
- Fisher, M.; Cardoso, R.C.; Collins, E.C.; Dadswell, C.; Dennis, L.A.; Dixon, C.; Farrell, M.; Ferrando, A.; Huang, X.; Jump, M.; et al. An Overview of Verification and Validation Challenges for Inspection Robots. Robotics 2021, 10, 67. [Google Scholar] [CrossRef]
- Lovering, D. Radioactive Robot: The Machines That Cleaned up Three Mile Island; Scientific American: New York, NY, USA, 2009. [Google Scholar]
- Oshiro, T.; Palmer, C.; Hollinger, G.; Menguc, Y.; Palmer, T.; Courier, T.; Yirmibesoglu, O.D.; Morrell, S.; Rynes, A. Soft Robotics in Radiation Environments for Safeguard Applications. Available online: http://research.engr.oregonstate.edu/rdml/sites/research.engr.oregonstate.edu.rdml/files/soft_robotics_inmm_annual_2017.pdf (accessed on 28 September 2021).
- Smith, R.; Cucco, E.; Fairbairn, C. Robotic Development for the Nuclear Environment: Challenges and Strategy. Robotics 2020, 9, 94. [Google Scholar] [CrossRef]
- Omarali, B.; Denoun, B.; Althoefer, K.; Jamone, L.; Valle, M.; Farkhatdinov, I. Virtual Reality based Telerobotics Framework with Depth Cameras. In Proceedings of the IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 1217–1222. [Google Scholar]
- Marturi, N.; Rastegarpanah, A.; Rajasekaran, V.; Ortenzi, V.; Bekiroglu, Y.; Kuo, J.; Stolkin, R. Towards advanced robotic manipulations for nuclear decommissioning. In Robots Operating in Hazardous Environments; InTech: London, UK, 2017. [Google Scholar]
- Voinov, I.; Nosikov, M. Automatic and Manual Control Algorithms of Radiation-Proof Manipulators. In Proceedings of the IEEE 2018 Global Smart Industry Conference (GloSIC), Chelyabinsk, Russia, 13–15 November 2018; pp. 1–6. [Google Scholar]
- Prikhodko, V.; Sobolev, A.; Zhukov, A.; Chavkin, E.; Fomin, A.; Levshchanov, V.; Pavlov, S.; Svetukhin, V. Radiation-resistant robotic manipulator controlled by 6-DoF haptic control device to perform technological tasks in hot cells. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2019; Volume 1353, p. 012045. [Google Scholar]
- Lee, K.; Wang, Y.; Zheng, C. Twister hand: Underactuated robotic gripper inspired by origami twisted tower. IEEE Trans. Robot. 2020, 36, 488–500. [Google Scholar] [CrossRef]
- Chen, T.; Haas-Heger, M.; Ciocarlie, M. Underactuated hand design using mechanically realizable manifolds. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7392–7398. [Google Scholar]
- Phillips, B.T.; Becker, K.P.; Kurumaya, S.; Galloway, K.C.; Whittredge, G.; Vogt, D.M.; Teeple, C.B.; Rosen, M.H.; Pieribone, V.A.; Gruber, D.F.; et al. A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci. Rep. 2018, 8, 14779. [Google Scholar] [CrossRef] [Green Version]
- Yirmibeşoğlu, O.D.; Oshiro, T.; Olson, G.; Palmer, C.; Mengüç, Y. Evaluation of 3D printed soft robots in radiation environments and comparison with molded counterparts. Front. Robot. AI 2019, 6, 40. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhang, Y.; Kan, Z.; Zeng, J.; Wang, M.Y. Hybrid jamming for bioinspired soft robotic fingers. Soft Robot. 2020, 7, 292–308. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Yao, J.; Wei, C.; Zhou, P.; Xu, Y.; Zhao, Y. An untethered soft robotic gripper with high payload-to-weight ratio. Mech. Mach. Theory 2021, 158, 104226. [Google Scholar] [CrossRef]
- Sui, D.; Zhu, Y.; Zhao, S.; Wang, T.; Agrawal, S.K.; Zhang, H.; Zhao, J. A Bioinspired Soft Swallowing Gripper for Universal Adaptable Grasping. Soft Robot. 2020. [Google Scholar] [CrossRef]
- Licht, S.; Collins, E.; Badlissi, G.; Rizzo, D. A partially filled jamming gripper for underwater recovery of objects resting on soft surfaces. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6461–6468. [Google Scholar]
- Godaba, H.; Sajad, A.; Patel, N.; Althoefer, K.; Zhang, K. A Two-Fingered Robot Gripper with Variable Stiffness Flexure Hinges Based on Shape Morphing. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 8716–8721. [Google Scholar]
- Nogueira, J.; Martinez-Cantin, R.; Bernardino, A.; Jamone, L. Unscented Bayesian optimization for safe robot grasping. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1967–1972. [Google Scholar]
- Castanheira, J.; Vicente, P.; Martinez-Cantin, R.; Jamone, L.; Bernardino, A. Finding safe 3D robot grasps through efficient haptic exploration with unscented Bayesian optimization and collision penalty. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1643–1648. [Google Scholar]
- Siddiqui, M.S.; Coppola, C.; Solak, G.; Jamone, L. Grasp Stability Prediction for a Dexterous Robotic Hand combining Depth Vision and Haptic Bayesian Exploration. Front. Robot. AI 2021. in print. [Google Scholar] [CrossRef] [PubMed]
- Solak, G.; Jamone, L. Learning by Demonstration and Robust Control of Dexterous In-Hand Robotic Manipulation Skills. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 8246–8251. [Google Scholar]
- Tomo, T.P.; Regoli, M.; Schmitz, A.; Natale, L.; Kristanto, H.; Somlor, S.; Jamone, L.; Metta, G.; Sugano, S. A New Silicone Structure for uSkin—A Soft, Distributed, Digital 3-Axis Skin Sensor and Its Integration on the Humanoid Robot iCub. IEEE Robot. Autom. Lett. 2018, 3, 2584–2591. [Google Scholar] [CrossRef]
- Zenha, R.; Denoun, B.; Coppola, C.; Jamone, L. Tactile Slip Detection in the Wild Leveraging Distributed Sensing of both Normal and Shear Forces. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Tomo, T.P.; Schmitz, A.; Wong, W.K.; Kristanto, H.; Somlor, S.; Hwang, J.; Jamone, L.; Sugano, S. Covering a Robot Fingertip With uSkin: A Soft Electronic Skin With Distributed 3-Axis Force Sensitive Elements for Robot Hands. IEEE Robot. Autom. Lett. 2018, 3, 124–131. [Google Scholar] [CrossRef]
- Denoun, B.; Leon, B.; Hansard, M.; Jamone, L. Grasping Robot Integration and Prototyping: The GRIP Software Framework. IEEE Robot. Autom. Mag. 2021, 28, 101–111. [Google Scholar] [CrossRef]
- Chitta, S.; Sucan, I.; Cousins, S. Moveit! IEEE Robot. Autom. Mag. 2012, 19, 18–19. [Google Scholar] [CrossRef]
- Schillinger, P.; Kohlbrecher, S.; von Stryk, O. Human-robot collaborative high-level control with application to rescue robotics. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2796–2802. [Google Scholar]
- Brunner, S.G.; Steinmetz, F.; Belder, R.; Dömel, A. RAFCON: A graphical tool for engineering complex, robotic tasks. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3283–3290. [Google Scholar]
- Chablat, D.; Venkateswaran, S.; Boyer, F. Dynamic model of a bio-inspired robot for piping inspection. In ROMANSY 22–Robot Design, Dynamics and Control; Springer: Cham, Switzerland, 2019; pp. 42–51. [Google Scholar]
- Barhli, S.; Saucedo-Mora, L.; Jordan, M.; Cinar, A.; Reinhard, C.; Mostafavi, M.; Marrow, T. Synchrotron X-ray characterization of crack strain fields in polygranular graphite. Carbon 2017, 124, 357–371. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Tung, S.T.E.; Glisic, B. Crack detection and characterization techniques—An overview. Struct. Control Health Monit. 2014, 21, 1387–1413. [Google Scholar] [CrossRef]
- Nicoletti, R.; Cavalini, A.A.; Steffen, V. Detection of Cracks in Rotating Shafts by Using the Combination Resonances Approach and the Approximated Entropy Algorithm. Shock Vib. 2018, 2018, 4094631. [Google Scholar] [CrossRef] [Green Version]
- Mohan, A.; Poobal, S. Crack detection using image processing: A critical review and analysis. Alex. Eng. J. 2018, 57, 787–798. [Google Scholar] [CrossRef]
- Berghmans, F.; Fernandez, A.F.; Brichard, B.; Vos, F.; Decreton, M.C.; Gusarov, A.I.; Deparis, O.; Megret, P.; Blondel, M.; Caron, S.; et al. Radiation hardness of fiber optic sensors for monitoring and remote handling applications in nuclear environments. In Process Monitoring with Optical Fibers and Harsh Environment Sensors; International Society for Optics and Photonics, Photonics East: Boston, MA, USA, 1999; Volume 3538, pp. 28–39. [Google Scholar]
- Phéron, X.; Girard, S.; Boukenter, A.; Brichard, B.; Delepine-Lesoille, S.; Bertrand, J.; Ouerdane, Y. High γ-ray dose radiation effects on the performances of Brillouin scattering based optical fiber sensors. Opt. Express 2012, 20, 26978–26985. [Google Scholar] [CrossRef]
- Inaudi, D.; Glisic, B.; Fakra, S.; Billan, J.; Redaelli, S.; Perez, J.G.; Scandale, W. Development of a displacement sensor for the CERN-LHC superconducting cryodipoles. Meas. Sci. Technol. 2001, 12, 887. [Google Scholar] [CrossRef] [Green Version]
- Hashemian, H. The state of the art in nuclear power plant instrumentation and control. Int. J. Nucl. Energy Sci. Technol. 2009, 4, 330–354. [Google Scholar] [CrossRef]
- Berthold III, J.W. Overview of prototype fiber optic sensors for future application in nuclear environments. In Optical Fibre Sensing and Systems in Nuclear Environments; International Society for Optics and Photonics, Society of Photo-Optical Instrumentation Engineers: Mol, Belgium, 1994; Volume 2425, pp. 74–83. [Google Scholar]
- Palermo, F.; Konstantinova, J.; Althoefer, K.; Poslad, S.; Farkhatdinov, I. Automatic fracture characterization using tactile and proximity optical sensing. Front. Robot. AI 2020, 7, 174. [Google Scholar] [CrossRef]
- Palermo, F.; Konstantinova, J.; Althoefer, K.; Poslad, S.; Farkhatdinov, I. Implementing tactile and proximity sensing for crack detection. In Proceedings of the Rincon IEEE International Conference on Robotics and Automation (ICRA), Online Virtual Conference, 31 May–15 June 2020; pp. 632–637. [Google Scholar]
- Konstantinova, J.; Cotugno, G.; Stilli, A.; Noh, Y.; Althoefer, K. Object classification using hybrid fiber optical force/proximity sensor. In Proceedings of the 2017 IEEE Sensors, Glasgow, UK, 29 October–1 November 2017; pp. 1–3. [Google Scholar]
- Konstantinova, J.; Stilli, A.; Althoefer, K. Fingertip fiber optical tactile array with two-level spring structure. Sensors 2017, 17, 2337. [Google Scholar] [CrossRef] [Green Version]
- Morita, Y.; Seguchi, T. Radiation resistance of nylon. Denki Gakkai Zetsuen Zairyo Kenkyukai Shiryo 1983, EIM-83, 47–52. [Google Scholar]
- Palermo, F.; Rincon-Ardila, L.; Oh, C.; Althoefer, K.; Poslad, S.; Venture, G.; Farkhatdinov, I. Multi-modal robotic visual-tactile localisation and detection of surface cracks. In Proceedings of the 2021 IEEE International Conference on Automation Science and Engineering, Lyon, France, 23–27 August 2021. [Google Scholar]
- Ribeiro, P.; Khan, M.A.; Alfadhel, A.; Kosel, J.; Franco, F.; Cardoso, S.; Bernardino, A.; Schmitz, A.; Santos-Victor, J.; Jamone, L. Bioinspired Ciliary Force Sensor for Robotic Platforms. IEEE Robot. Autom. Lett. 2017, 2, 971–976. [Google Scholar] [CrossRef]
- Seale, M.; Cummins, C.; Viola, I.; Mastropaolo, E.; Nakayama, N. Design principles of hair-like structures as biological machines. J. R. Soc. Interface 2018, 15, 20180206. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, P.; Cardoso, S.; Bernardino, A.; Jamone, L. Highly sensitive bio-inspired sensor for fine surface exploration and characterization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Online Virtual Conference, 31 May–15 June 2020. [Google Scholar]
- Ribeiro, P.; Cardoso, S.; Bernardino, A.; Jamone, L. Fruit quality control by surface analysis using a bio-inspired soft tactile sensor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020. [Google Scholar]
- Althoefer, K. Antagonistic actuation and stiffness control in soft inflatable robots. Nat. Rev. Mater. 2018, 3, 76–77. [Google Scholar] [CrossRef]
- Shiva, A.; Stilli, A.; Noh, Y.; Faragasso, A.; De Falco, I.; Gerboni, G.; Cianchetti, M.; Menciassi, A.; Althoefer, K.; Wurdemann, H.A. Tendon-based stiffening for a pneumatically actuated soft manipulator. IEEE Robot. Autom. Lett. 2016, 1, 632–637. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Chen, G.; Wu, H.; Kong, L.; Wang, H. A pneumatic/cable-driven hybrid linear actuator with combined structure of origami chambers and deployable mechanism. IEEE Robot. Autom. Lett. 2020, 5, 3564–3571. [Google Scholar] [CrossRef]
- Al-Fahaam, H.; Davis, S.; Nefti-Meziani, S. The design and mathematical modelling of novel extensor bending pneumatic artificial muscles (EBPAMs) for soft exoskeletons. Robot. Auton. Syst. 2018, 99, 63–74. [Google Scholar] [CrossRef]
- Chang, S.Y.; Takashima, K.; Nishikawa, S.; Niiyama, R.; Someya, T.; Onodera, H.; Kuniyoshi, Y. Design of small-size pouch motors for rat gait rehabilitation device. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 4578–4581. [Google Scholar]
- Niiyama, R.; Sun, X.; Sung, C.; An, B.; Rus, D.; Kim, S. Pouch motors: Printable soft actuators integrated with computational design. Soft Robot. 2015, 2, 59–70. [Google Scholar] [CrossRef]
- Voisembert, S.; Mechbal, N.; Riwan, A.; Aoussat, A. Design of a novel long-range inflatable robotic arm: Manufacturing and numerical evaluation of the joints and actuation. J. Mech. Robot. 2013, 5, 045001. [Google Scholar] [CrossRef] [Green Version]
- Realmuto, J.; Sanger, T. A robotic forearm orthosis using soft fabric-based helical actuators. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 591–596. [Google Scholar]
- Gillespie, M.T.; Best, C.M.; Killpack, M.D. Simultaneous position and stiffness control for an inflatable soft robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1095–1101. [Google Scholar]
- Nguyen, P.H.; Mohd, I.I.; Sparks, C.; Arellano, F.L.; Zhang, W.; Polygerinos, P. Fabric soft poly-limbs for physical assistance of daily living tasks. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8429–8435. [Google Scholar]
- Hawkes, E.W.; Christensen, D.L.; Okamura, A.M. Design and implementation of a 300% strain soft artificial muscle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4022–4029. [Google Scholar]
- Usevitch, N.S.; Okamura, A.M.; Hawkes, E.W. APAM: Antagonistic pneumatic artificial muscle. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 1539–1546. [Google Scholar]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Greer, J.D.; Blumenschein, L.H.; Alterovitz, R.; Hawkes, E.W.; Okamura, A.M. Robust navigation of a soft growing robot by exploiting contact with the environment. Int. J. Robot. Res. 2020, 39, 1724–1738. [Google Scholar] [CrossRef] [Green Version]
- Putzu, F.; Abrar, T.; Althoefer, K. Plant-inspired soft pneumatic eversion robot. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 1327–1332. [Google Scholar]
- Abrar, T.; Putzu, F.; Rizqi, A.; Godaba, H.; Althoefer, K. Highly Manoeuvrable Eversion Robot Based on Fusion of Function with Structure. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Brown, J.P.; Farkhatdinov, I. Soft Haptic Interface based on Vibration and Particle Jamming. In Proceedings of the 2020 IEEE Haptics Symposium (HAPTICS), Crystal City, VA, USA, 28–31 March 2020; IEEE: Washington DC, USA, 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Otaran, A.; Farkhatdinov, I. Modeling and Control of Ankle Actuation Platform for Human-Robot Interaction. In Towards Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 338–348. [Google Scholar]
- Otaran, A.; Farkhatdinov, I. Haptic Ankle Platform for Interactive Walking in Virtual Reality. IEEE Trans. Vis. Comput. Graph. 2021. [Google Scholar] [CrossRef] [PubMed]
- Fung, W.K.; Lo, W.T.; Liu, Y.H.; Xi, N. A case study of 3D stereoscopic vs. 2D monoscopic tele-reality in real-time dexterous teleoperation. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 181–186. [Google Scholar] [CrossRef]
- Rakita, D. Methods for Effective Mimicry-based Teleoperation of Robot Arms. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 371–372. [Google Scholar] [CrossRef]
- Whitney, D.; Rosen, E.; Ullman, D.; Phillips, E.; Tellex, S. ROS Reality: A Virtual Reality Framework Using Consumer-Grade Hardware for ROS-Enabled Robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Omarali, B.; Althoefer, K.; Fulvio, M.; Valle, M.; Farkhatdinov, I. Workspace Scaling and Rate Mode Control for Virtual Reality based Robot Teleoperation. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics, Melbourne, Australia, 17–20 October 2021. [Google Scholar]
- Farkhatdinov, I.; Ryu, J.H. Switching of control signals in teleoperation systems: Formalization and application. In Proceedings of the 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Xian, China, 2–5 July 2008; pp. 353–358. [Google Scholar]
- King, H.H.; Hannaford, B.; Kwok, K.W.; Yang, G.Z.; Griffiths, P.; Okamura, A.; Farkhatdinov, I.; Ryu, J.H.; Sankaranarayanan, G.; Arikatla, V.; et al. Plugfest 2009: Global interoperability in telerobotics and telemedicine. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 1733–1738. [Google Scholar]
- Omarali, B.; Palermo, F.; Valle, M.; Poslad, S.; Althoefer, K.; Farkhatdinov, I. Position and velocity control for telemanipulation with interoperability protocol. In Annual Conference Towards Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 316–324. [Google Scholar]
- Junput, B.; Wei, X.; Jamone, L. Feel It on Your Fingers: Dataglove with Vibrotactile Feedback for Virtual Reality and Telerobotics. In Towards Autonomous Robotic Systems (TAROS); Springer: Basingstoke, UK, 2019. [Google Scholar]
- Junput, B.; Farkhatdinov, I.; Jamone, L. Touch it, rub it, feel it! Haptic rendering of physical textures with a low cost wearable system. In Towards Autonomous Robotic Systems (TAROS); Springer: Basingstoke, UK, 2020. [Google Scholar]
- Duvernoy, B.; Farkhatdinov, I.; Topp, S.; Hayward, V. Electromagnetic actuator for tactile communication. In International Conference on Human Haptic Sensing and Touch Enabled Computer Applications; Springer: Berlin/Heidelberg, Germany, 2018; pp. 14–24. [Google Scholar]
- Ogrinc, M.; Farkhatdinov, I.; Walker, R.; Burdet, E. Sensory integration of apparent motion speed and vibration magnitude. IEEE Trans. Haptics 2017, 11, 455–463. [Google Scholar] [CrossRef] [Green Version]
- Ogrinc, M.; Farkhatdinov, I.; Walker, R.; Burdet, E. Horseback riding therapy for a deafblind individual enabled by a haptic interface. Assist. Technol. 2018, 30, 143–150. [Google Scholar] [CrossRef] [PubMed]
- Brown, J.; Farkhatdinov, I. Shape-Changing Touch Pad based on Particle Jamming and Vibration. In Proceedings of the 2021 IEEE World Haptics Conference (WHC), Online Virtual Conference, 6–9 July 2021; p. 337. [Google Scholar]
- Brown, J.; Farkhatdinov, I. A Soft, Vibrotactile, Shape-Changing Joystick for Telerobotics. In Proceedings of the 2021 IEEE World Haptics Conference (WHC), Online Virtual Conference, 6–9 July 2021; p. 1158. [Google Scholar]
- Farkhatdinov, I.; Ryu, J.H.; Poduraev, J. Control strategies and feedback information in mobile robot teleoperation. IFAC Proc. Vol. 2008, 41, 14681–14686. [Google Scholar] [CrossRef] [Green Version]
- Farkhatdinov, I.; Ryu, J.H.; Poduraev, J. A user study of command strategies for mobile robot teleoperation. Intell. Serv. Robot. 2009, 2, 95–104. [Google Scholar] [CrossRef]
- Otaran, A.; Farkhatdinov, I. A Short Description of an Ankle-Actuated Seated VR Locomotion Interface. In Proceedings of the 2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Online Virtual Conference, 27 March–2 April 2021; pp. 64–66. [Google Scholar]
- Otaran, A.; Farkhatdinov, I. Walking-in-Place Foot Interface for Locomotion Control and Telepresence of Humanoid Robotso. In Proceedings of the 2021 IEEE-RAS International Conference on Humanoid Robots, Munich, Germany, 20–21 July 2021. [Google Scholar]
- Otaran, A.; Farkhatdinov, I. A Cable-Driven Walking Interface with Haptic Feedback for Seated VR. In Proceedings of the 2021 IEEE World Haptics Conference (WHC), Online Virtual Conference, 6–9 July 2021; p. 592. [Google Scholar]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vitanov, I.; Farkhatdinov, I.; Denoun, B.; Palermo, F.; Otaran, A.; Brown, J.; Omarali, B.; Abrar, T.; Hansard, M.; Oh, C.; et al. A Suite of Robotic Solutions for Nuclear Waste Decommissioning. Robotics 2021, 10, 112. https://doi.org/10.3390/robotics10040112
Vitanov I, Farkhatdinov I, Denoun B, Palermo F, Otaran A, Brown J, Omarali B, Abrar T, Hansard M, Oh C, et al. A Suite of Robotic Solutions for Nuclear Waste Decommissioning. Robotics. 2021; 10(4):112. https://doi.org/10.3390/robotics10040112
Chicago/Turabian StyleVitanov, Ivan, Ildar Farkhatdinov, Brice Denoun, Francesca Palermo, Ata Otaran, Joshua Brown, Bukeikhan Omarali, Taqi Abrar, Miles Hansard, Changjae Oh, and et al. 2021. "A Suite of Robotic Solutions for Nuclear Waste Decommissioning" Robotics 10, no. 4: 112. https://doi.org/10.3390/robotics10040112
APA StyleVitanov, I., Farkhatdinov, I., Denoun, B., Palermo, F., Otaran, A., Brown, J., Omarali, B., Abrar, T., Hansard, M., Oh, C., Poslad, S., Liu, C., Godaba, H., Zhang, K., Jamone, L., & Althoefer, K. (2021). A Suite of Robotic Solutions for Nuclear Waste Decommissioning. Robotics, 10(4), 112. https://doi.org/10.3390/robotics10040112