
Tractor-Robot Cooperation: A Heterogeneous Leader-Follower Approach


Abstract
:1. Introduction
2. Materials and Methods
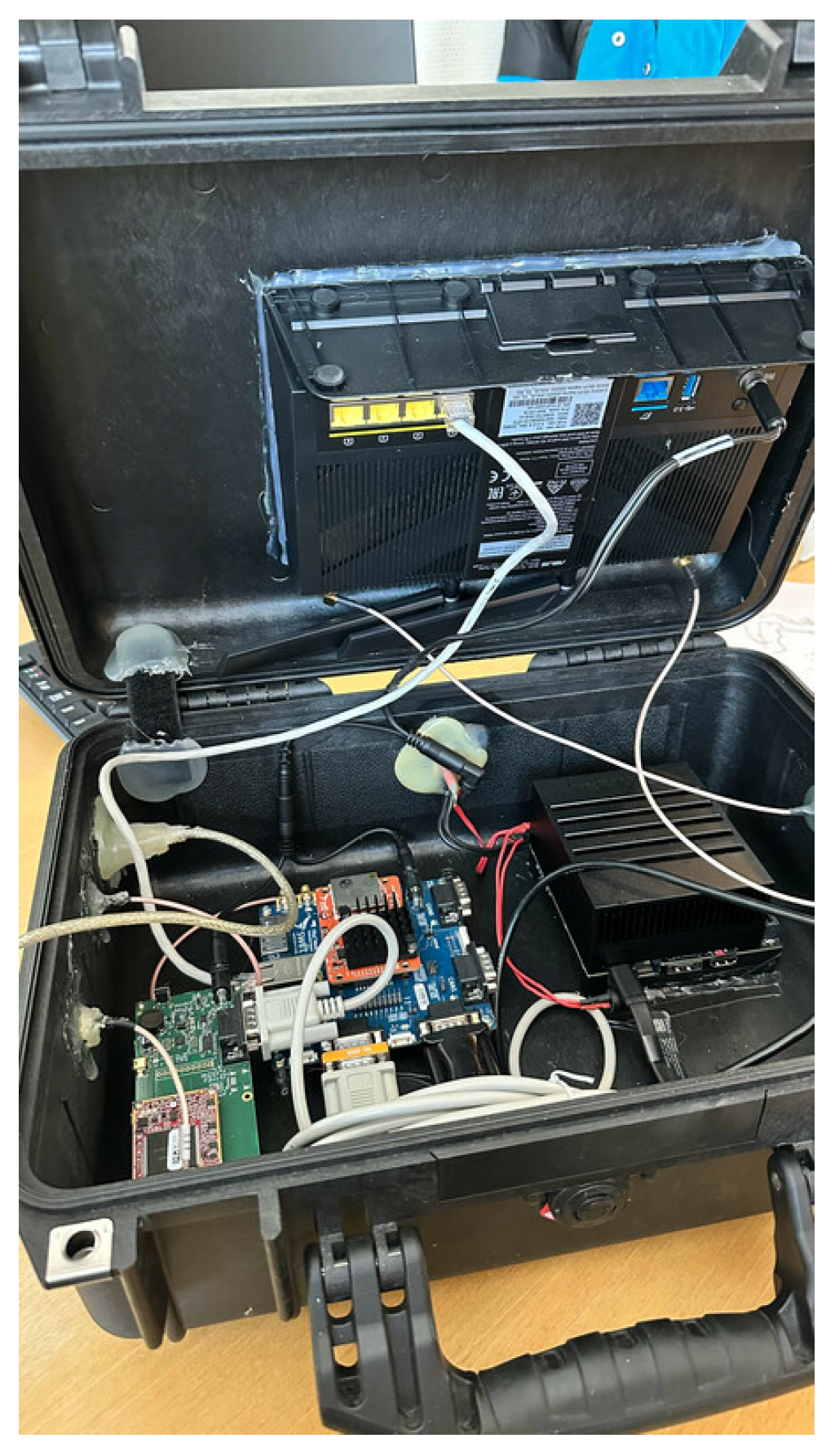
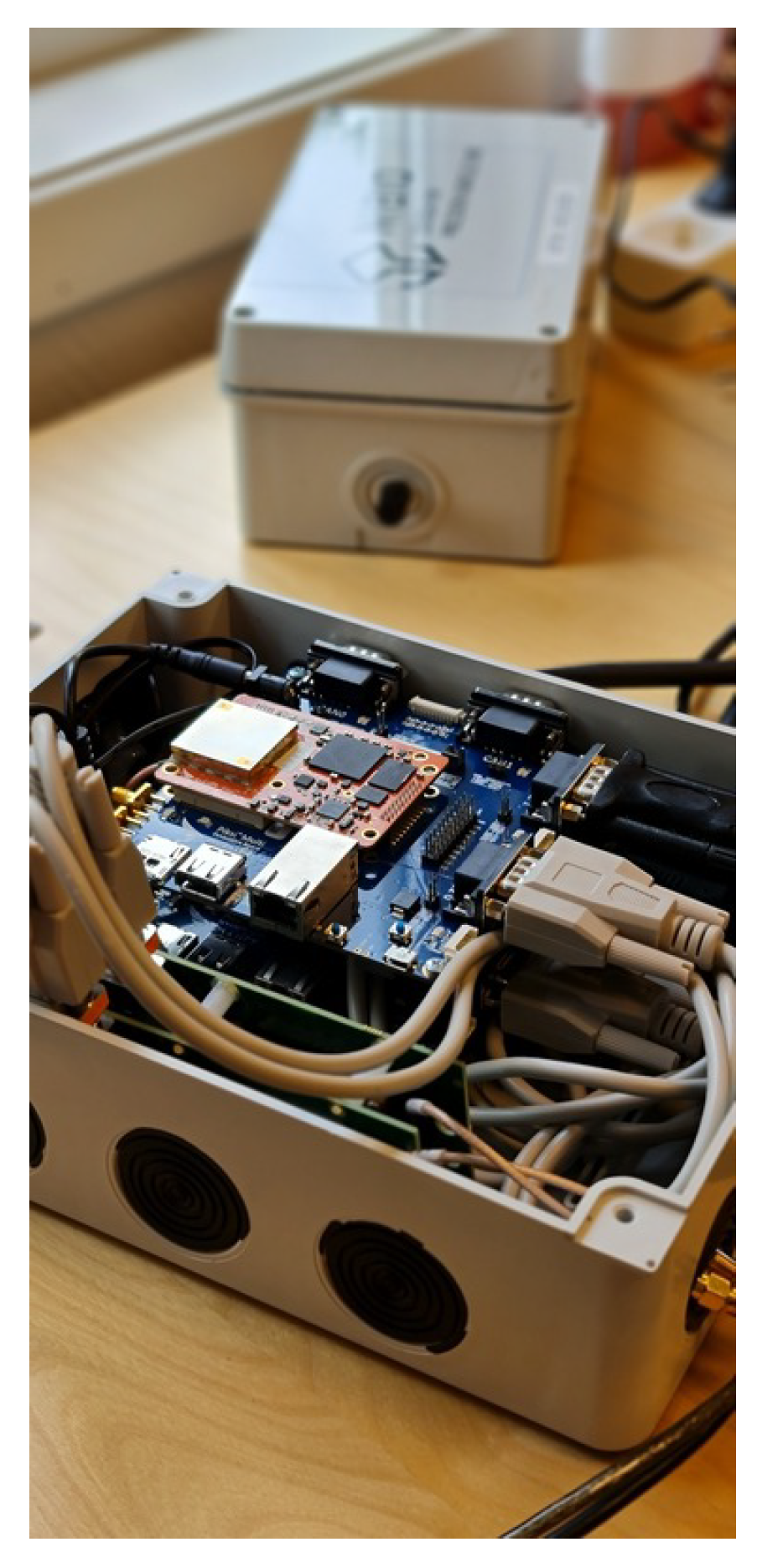
Hardware Description
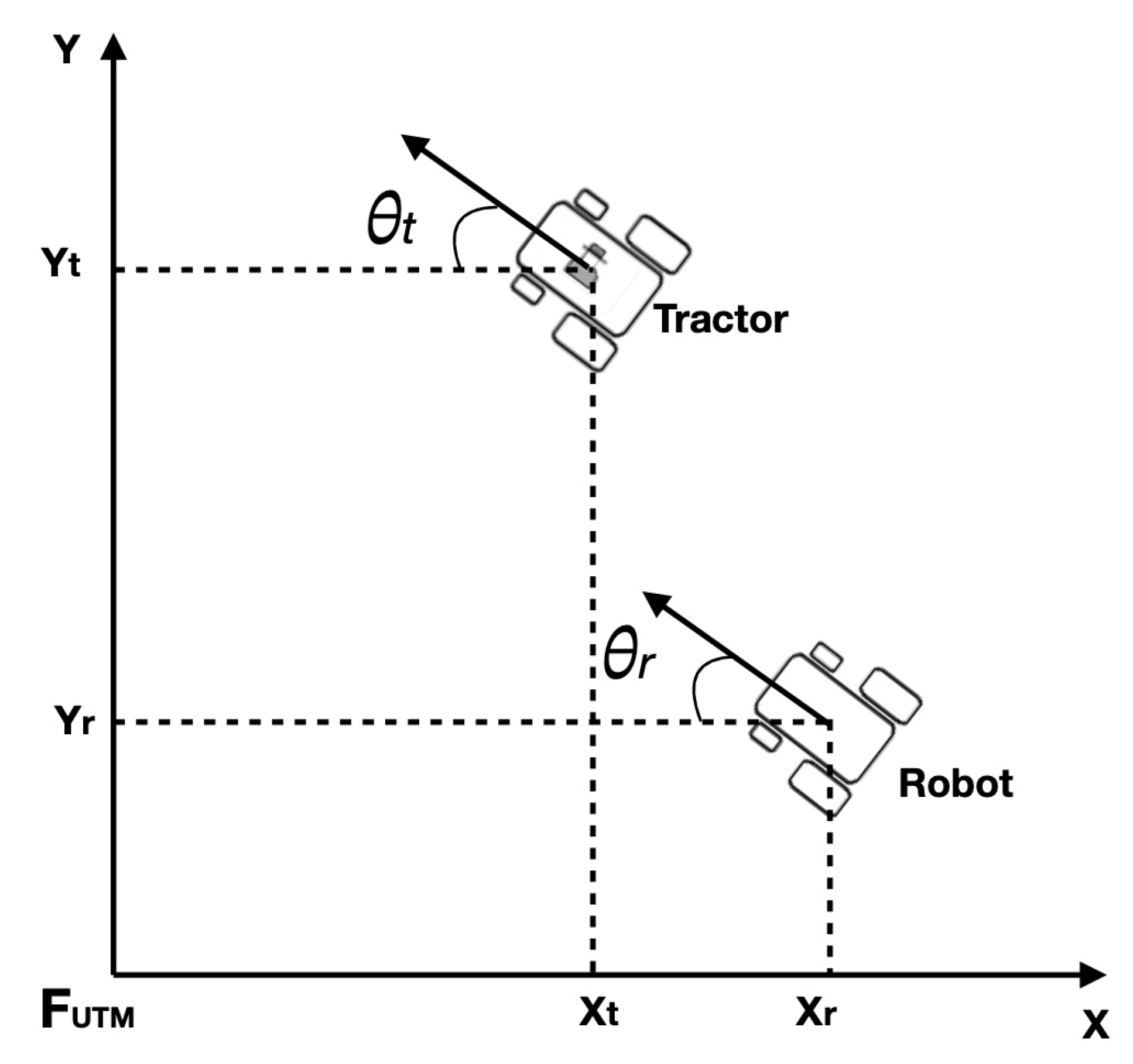
3. Leader–Follower Scheme
Control Law Design
4. Experimental Results
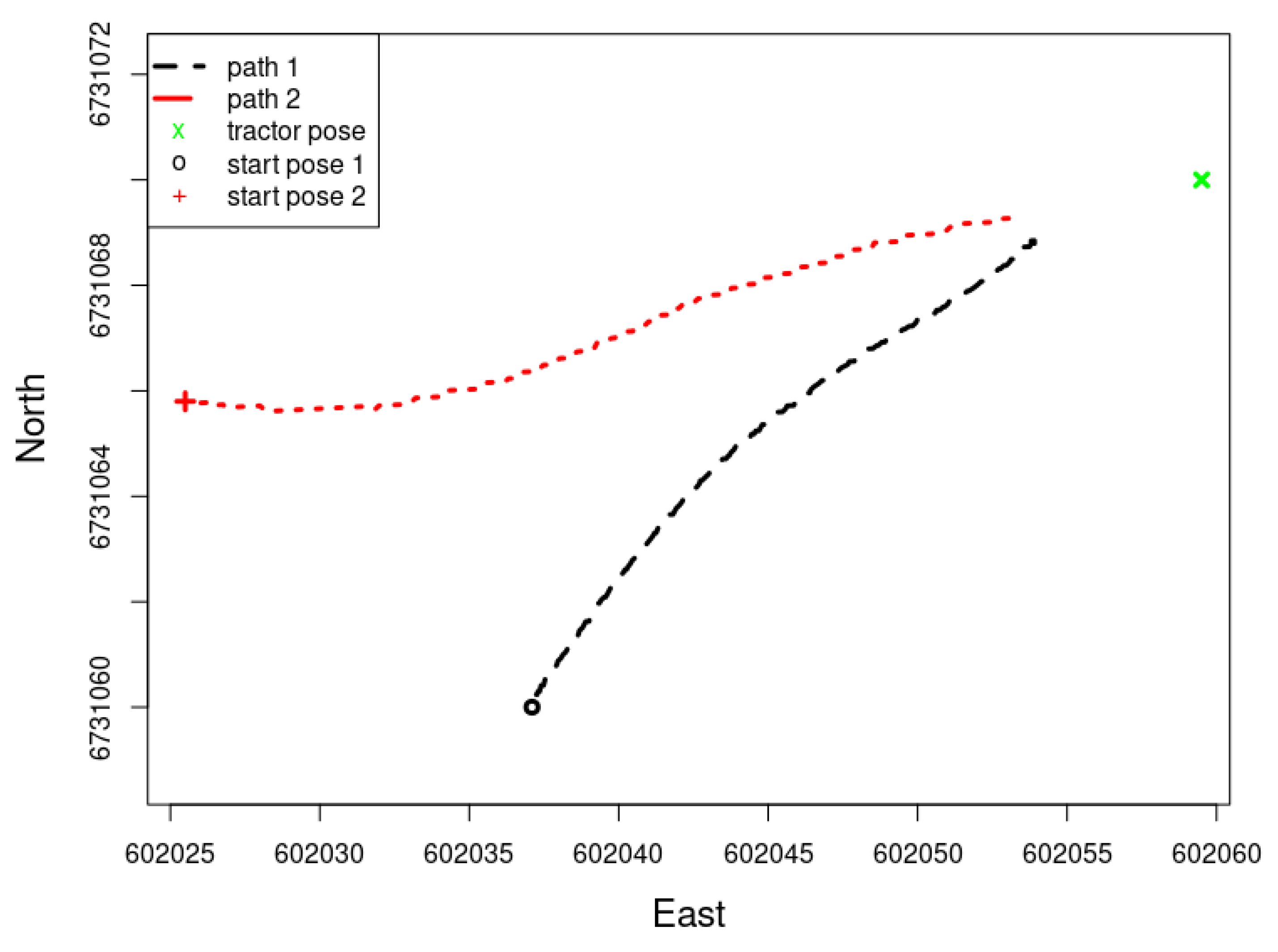
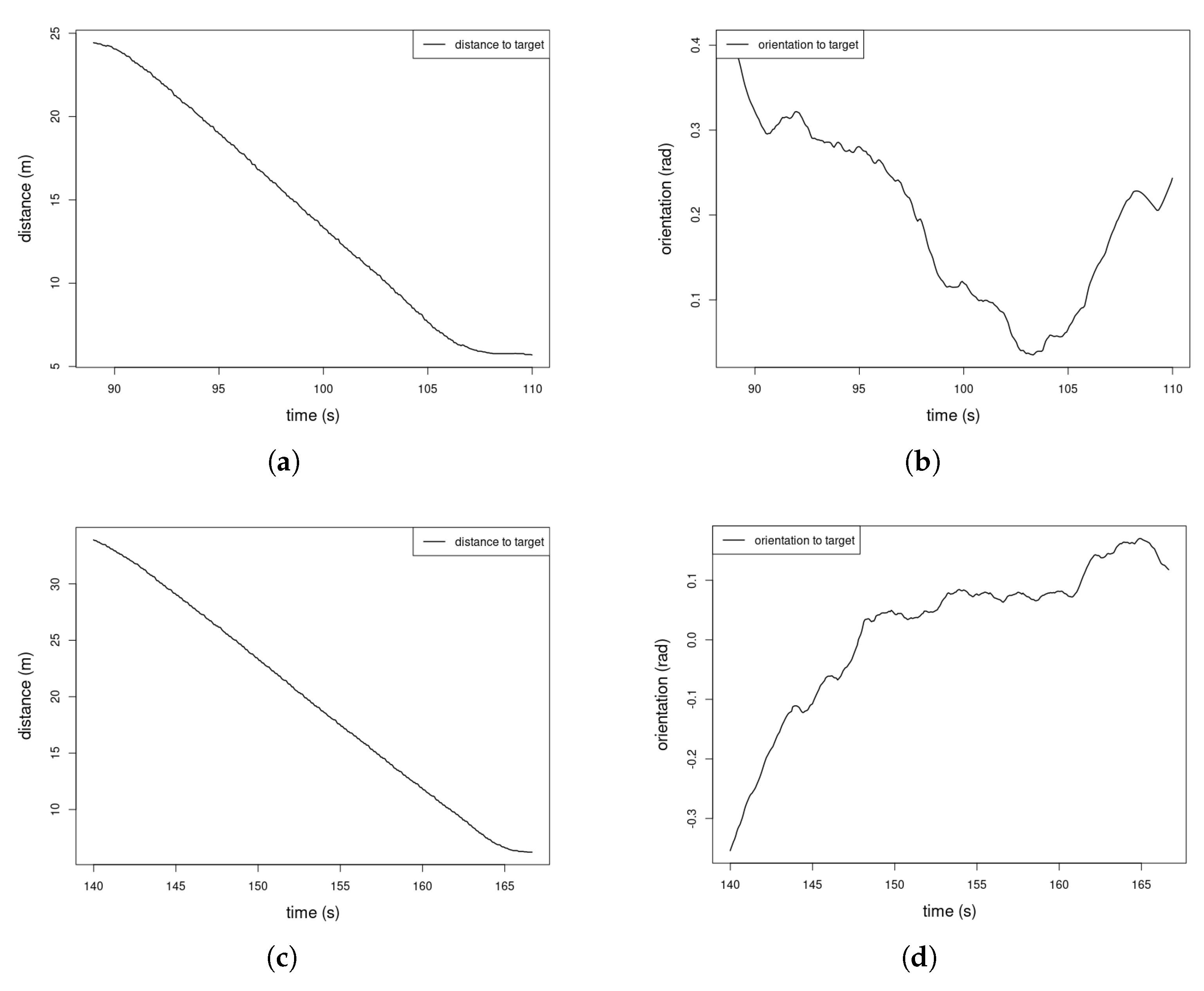
4.1. Static GNSS Waypoint Following
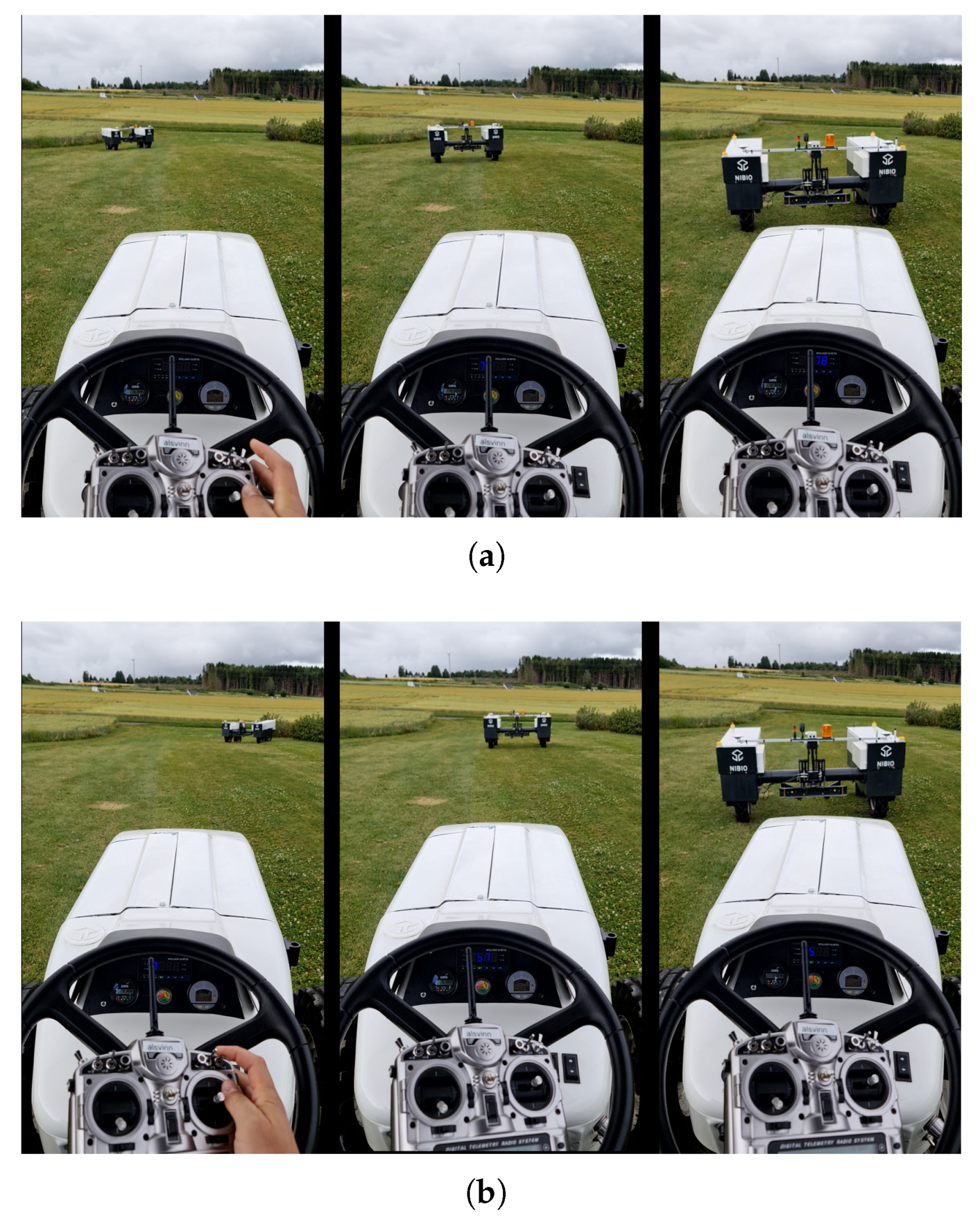
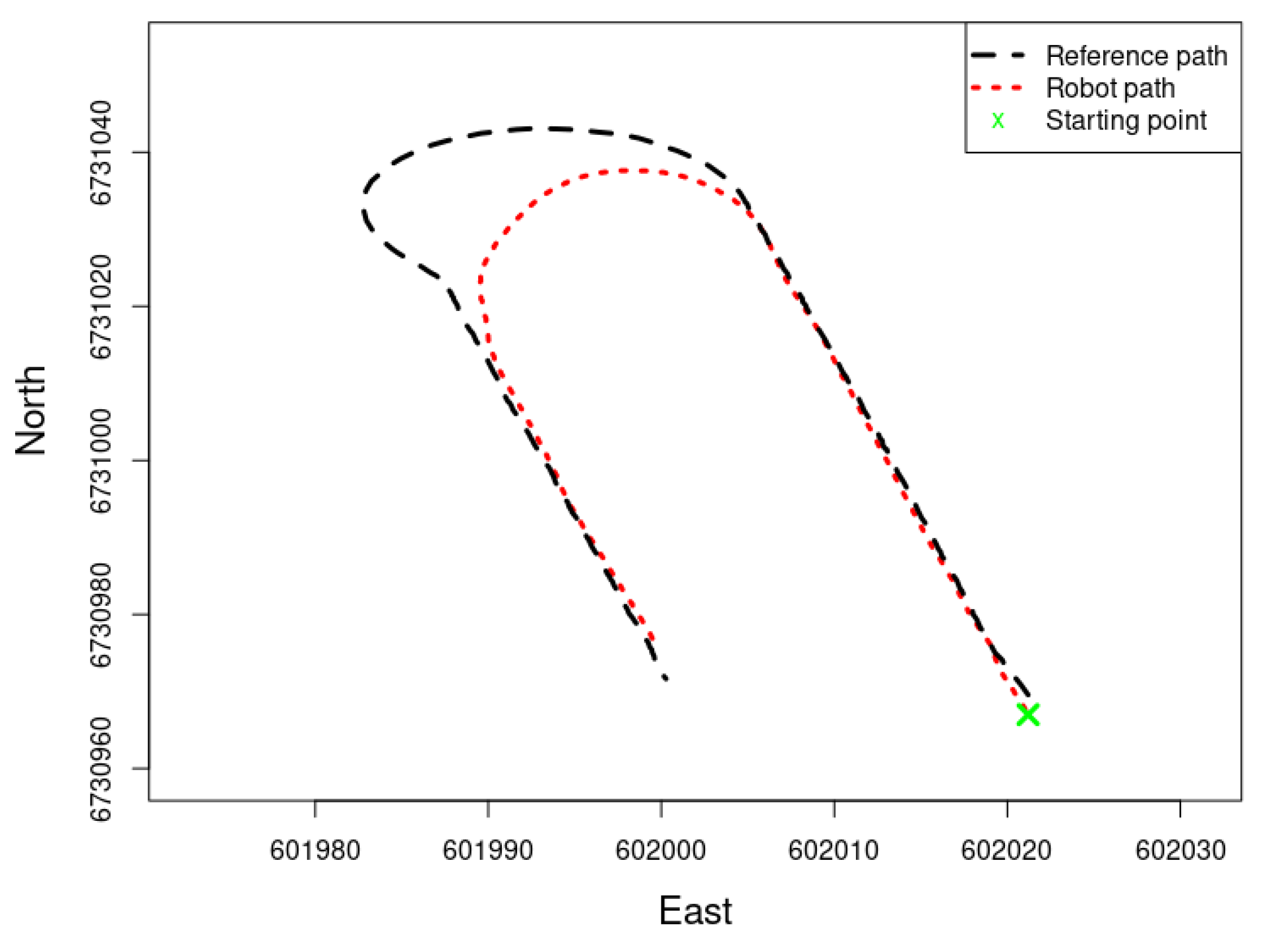
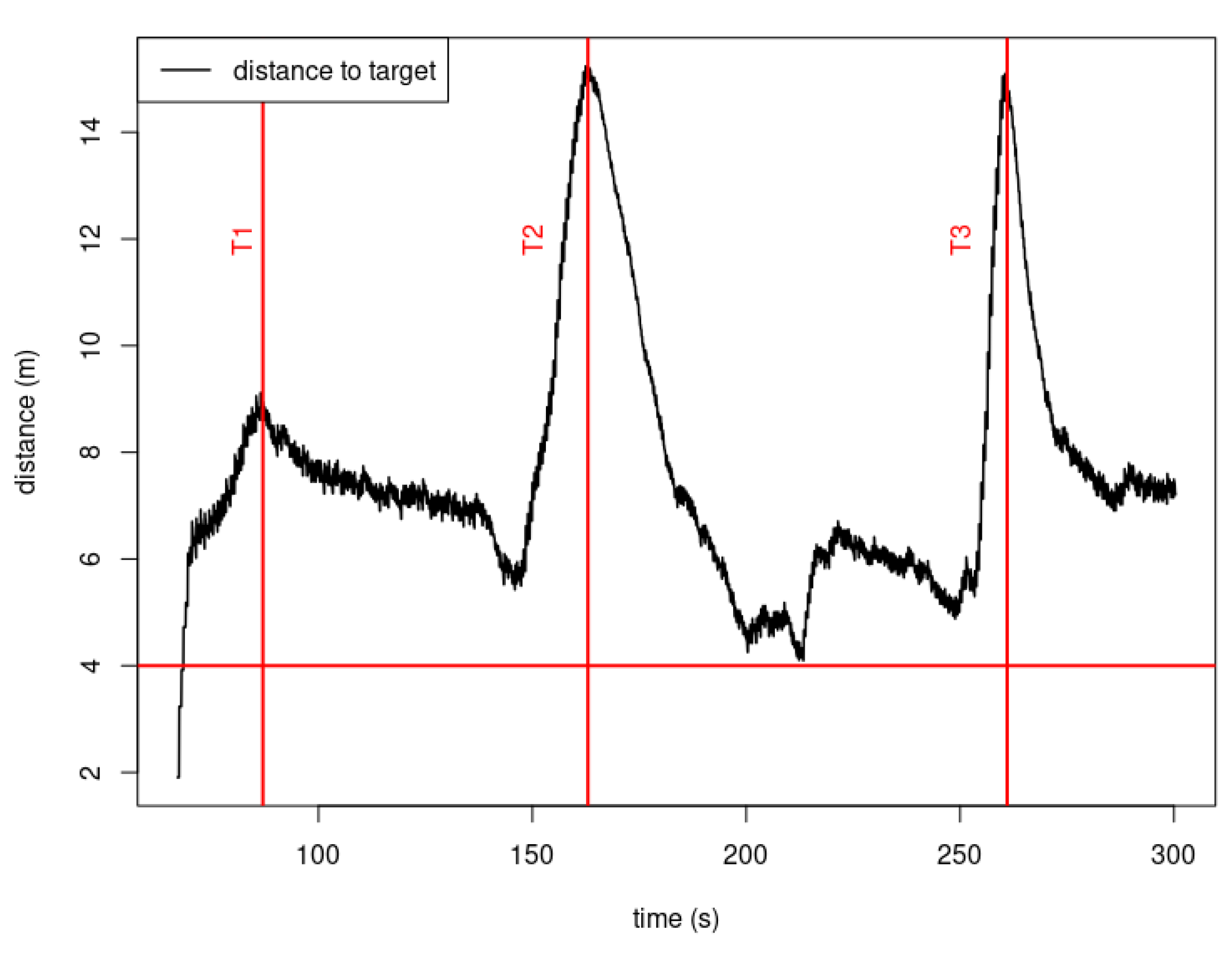
4.2. Dynammic GNSS Waypoint Following: Leader–Follower Configuration
5. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Guinand, F.; Monmarche, N.; Siarry, P. Artificial Ants: From Collective Intelligence to Real-Life Optimization and Beyond; ISTE: London, UK, 2010. [Google Scholar]
- Thomasson, J.A.; Baillie, C.P.; Antille, D.L.; McCarthy, C.L.; Lobsey, C.R. A review of the state of the art in agricultural automation. Part II: On-farm agricultural communications and connectivity. In Proceedings of the 2018 ASABE Annual International Meeting. American Society of Agricultural and Biological Engineers, Detroit, MI, USA, 29 July–1 August 2018; p. 1. [Google Scholar]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An overview of cooperative robotics in agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Emmi, L.; Le Flécher, E.; Cadenat, V.; Devy, M. A hybrid representation of the environment to improve autonomous navigation of mobile robots in agriculture. Precis. Agric. 2021, 22, 524–549. [Google Scholar] [CrossRef]
- Hiremath, S.A.; Van Der Heijden, G.W.; Van Evert, F.K.; Stein, A.; Ter Braak, C.J. Laser range finder model for autonomous navigation of a robot in a maize field using a particle filter. Comput. Electron. Agric. 2014, 100, 41–50. [Google Scholar] [CrossRef]
- Yin, X.; Wang, Y.; Chen, Y.; Jin, C.; Du, J. Development of autonomous navigation controller for agricultural vehicles. Int. J. Agric. Biol. Eng. 2020, 13, 70–76. [Google Scholar] [CrossRef]
- Aghi, D.; Mazzia, V.; Chiaberge, M. Local motion planner for autonomous navigation in vineyards with a RGB-D camera-based algorithm and deep learning synergy. Machines 2020, 8, 27. [Google Scholar] [CrossRef]
- Higuti, V.A.; Velasquez, A.E.; Magalhaes, D.V.; Becker, M.; Chowdhary, G. Under canopy light detection and ranging-based autonomous navigation. J. Field Robot. 2019, 36, 547–567. [Google Scholar] [CrossRef]
- Moeller, R.; Deemyad, T.; Sebastian, A. Autonomous navigation of an agricultural robot using RTK GPS and Pixhawk. In Proceedings of the 2020 Intermountain Engineering, Technology and Computing (IETC), Orem, UT, USA, 2–3 October 2020; pp. 1–6. [Google Scholar]
- Pixhawk Open Standards for Drone Hardware. Available online: https://pixhawk.org/ (accessed on 1 February 2023).
- Wang, M.; Tang, Y.; Hao, H.; Hao, F.; Ma, J. The design of agricultural machinery autonomous navigation system based on Linux-ARM. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 October 2016; pp. 1279–1282. [Google Scholar]
- Velasquez, A.; Higuti, V.; Guerrero, H.; Milori, D.; Magalhães, D.; Becker, M. Helvis-a small-scale agricultural mobile robot prototype for precision agriculture. In Proceedings of the 13th International Conference of Precision Agriculture, International Society of Precision Agriculture, St. Louis, MO, USA, 31 July–3 August 2016; Volume 17. [Google Scholar]
- Danton, A.; Roux, J.C.; Dance, B.; Cariou, C.; Lenain, R. Development of a spraying robot for precision agriculture: An edge following approach. In Proceedings of the 2020 IEEE Conference on Control Technology and Applications (CCTA), Montreal, QC, Canada, 24–26 August2020; pp. 267–272. [Google Scholar]
- Emmi, L.; Paredes-Madrid, L.; Ribeiro, A.; Pajares, G.; Gonzalez-de Santos, P. Fleets of robots for precision agriculture: A simulation environment. Ind. Robot. Int. J. 2013, 40, 41–58. [Google Scholar] [CrossRef]
- Li, N.; Remeikas, C.; Xu, Y.; Jayasuriya, S.; Ehsani, R. Task assignment and trajectory planning algorithm for a class of cooperative agricultural robots. J. Dyn. Syst. Meas. Control 2015, 137, 051004. [Google Scholar] [CrossRef]
- Zhang, C.; Noguchi, N. Development of a multi-robot tractor system for agriculture field work. Comput. Electron. Agric. 2017, 142, 79–90. [Google Scholar] [CrossRef]
- Li, S.; Xu, H.; Ji, Y.; Cao, R.; Zhang, M.; Li, H. Development of a following agricultural machinery automatic navigation system. Comput. Electron. Agric. 2019, 158, 335–344. [Google Scholar] [CrossRef]
- Shichao, L.; Ruyue, C.; Shuang, W.; Yuhan, J.; Man, Z.; Han, L. Development of multi-vehicle cooperative navigation communication system based on TD-LTE. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2017, 48, 45–51, 65. [Google Scholar]
- Huang, Y.; Fu, J.; Xu, S.; Han, T.; Liu, Y. Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture 2022, 12, 1169. [Google Scholar] [CrossRef]
- Xiaoping, B.; Zhuo, W.; Jingtao, H.; Lei, G.; Feng, X. Harvester group corporative navigation method based on leader-follower structure. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2017, 48, 14–21. [Google Scholar]
- Vilca, J.; Adouane, L.; Mezouar, Y. Stable and flexible multi-vehicle navigation based on dynamic inter-target distance matrix. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1416–1431. [Google Scholar] [CrossRef]
- Guillet, A.; Lenain, R.; Thuilot, B.; Rousseau, V. Formation control of agricultural mobile robots: A bidirectional weighted constraints approach. J. Field Robot. 2017, 34, 1260–1274. [Google Scholar] [CrossRef]
- Zhang, C.; Noguchi, N. Development of leader-follower system for field work. In Proceedings of the 2015 IEEE/SICE International Symposium on System Integration (SII), Nagoya, Japan, 11–13 December2015; pp. 364–368. [Google Scholar]
- Solectrac. Available online: https://solectrac.com/ (accessed on 1 February 2023).
- Swift Piksi Multi Evaluationkit. Available online: https://store.swiftnav.com/products/piksi-multi-evaluation-kit (accessed on 1 February 2023).
- Vectornav VN-100. Available online: https://www.vectornav.com/products/detail/vn-100 (accessed on 2 February 2023).
- NVIDIA Jetson AGX Xavier. Available online: https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-agx-xavier/ (accessed on 1 February 2023).
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 17 May 2009; Volume 3, p. 5. [Google Scholar]
- Asus 4G-AC68U Wireless Router. Available online: https://www.asus.com/no/networking-iot-servers/modem-routers/all-series/4g-ac68u/ (accessed on 1 February 2023).
- Rus, D.; Thomas, B. Human Supervision of Autonomous Robots. Int. J. -Hum.-Comput. Stud. 2010, 68, 751–764. [Google Scholar]
- Harik, E.H.C.; Guérin, F.; Guinand, F.; Brethé, J.F.; Pelvillain, H. UAV-UGV cooperation for objects transportation in an industrial area. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 547–552. [Google Scholar] [CrossRef]
- Harik, E.H.C.; Guerin, F.; Guinand, F.; Brethé, J.F.; Pelvillain, H.; Parédé, J.Y. Fuzzy logic controller for predictive vision-based target tracking with an unmanned aerial vehicle. Adv. Robot. 2017, 31, 368–381. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Dimension (L × W × H) | (2.13 × 2.6 × 1.16) m |
| Wheelbase | 2.0 m |
| Wheels size (diameter/width) | 0.54/0.2 m |
| Maximum linear velocity | 2.78 m/s |
| Maximum angular velocity | 9.87 rad/s |
| Instantaneous center of rotation | The intersection of the front wheelbase. |
| Onboard sensors | Lidar, RGB camera, IMU, GNSS-RTK receivers |
| Parameter | Significance | Values |
|---|---|---|
| positive proportional gain for the linear velocity | 0.3 | |
| positive proportional gain for the angular velocity | 0.6 | |
| positive derivative gain for the angular velocity | 2.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harik, E.H.C. Tractor-Robot Cooperation: A Heterogeneous Leader-Follower Approach. Robotics 2023, 12, 57. https://doi.org/10.3390/robotics12020057
Harik EHC. Tractor-Robot Cooperation: A Heterogeneous Leader-Follower Approach. Robotics. 2023; 12(2):57. https://doi.org/10.3390/robotics12020057
Chicago/Turabian StyleHarik, El Houssein Chouaib. 2023. "Tractor-Robot Cooperation: A Heterogeneous Leader-Follower Approach" Robotics 12, no. 2: 57. https://doi.org/10.3390/robotics12020057
APA StyleHarik, E. H. C. (2023). Tractor-Robot Cooperation: A Heterogeneous Leader-Follower Approach. Robotics, 12(2), 57. https://doi.org/10.3390/robotics12020057