

NOHAS: A Novel Orthotic Hand Actuated by Servo Motors and Mobile App for Stroke Rehabilitation




Abstract
:1. Introduction
- Limited precision and control: One key challenge in the integration of hand orthoses based on pneumatic servo drives using bioelectric signals lies in achieving seamless coordination and precision to ensure accurate and responsive control of the orthotic hand. Bioelectric-based control like EEG- and EMG-based control often faces challenges, such as weak signals and abnormal muscle activation in stroke patients, necessitating supplementary control paradigms for effectiveness. An inherent challenge in EEG- and EMG-controlled orthotic hands, compared to mobile app-controlled servo motors, is fine tuning and precise control, which impact the intricacy of certain movements;
- Acoustic noise, size, and cost: Many hand orthosis systems utilizing servo motors generate significant acoustic noise, which is a drawback in various scenarios, especially those requiring cost-effective and quiet operations. The noise level should be determined as it may impact user comfort and acceptance. This necessitates studying and overcoming the challenges in undesired acoustic noise in medical devices. Some hand orthoses are very expensive and unaffordable;
- Limited adaptivity and individual needs: Some hand orthosis devices may lack adaptability to the specific needs and preference of individuals. The one-size-fits-all approach may not help to meet diverse requirements. Soft robotics can be a solution for fitting various groups. A challenge in implementing soft robotics in orthotic hands is achieving the necessary balance between flexibility, adaptability, and precision to effectively mimic natural human movements while providing adequate support and functionality.
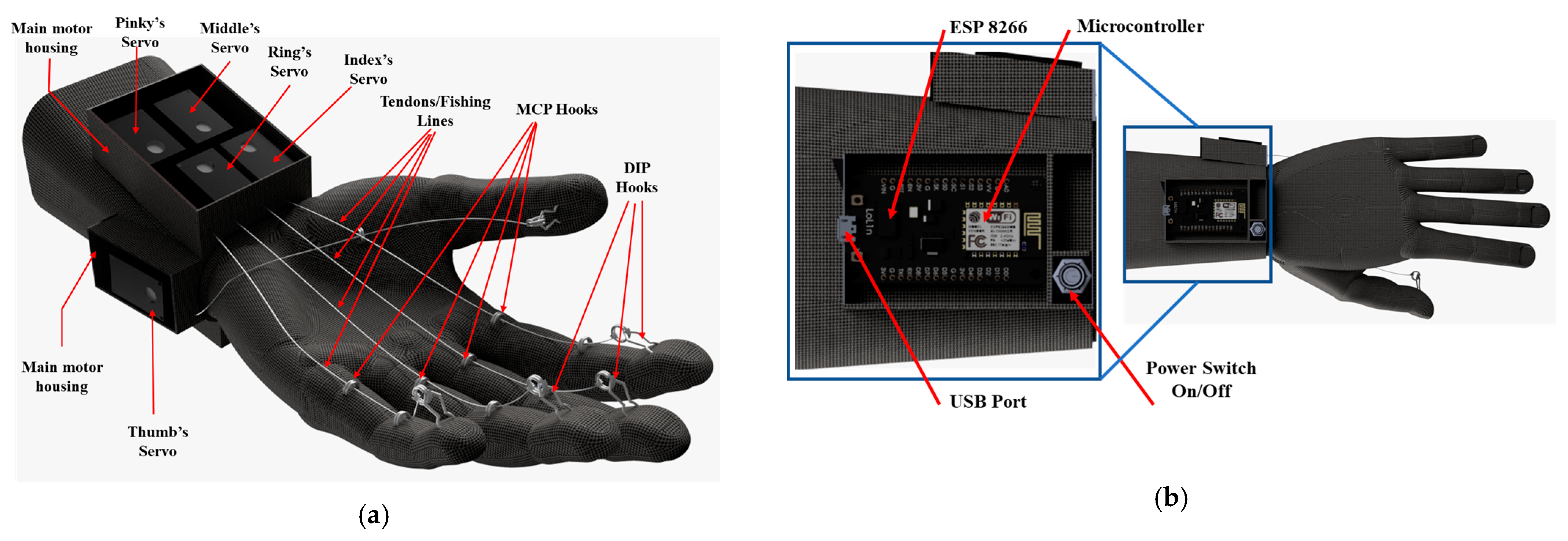
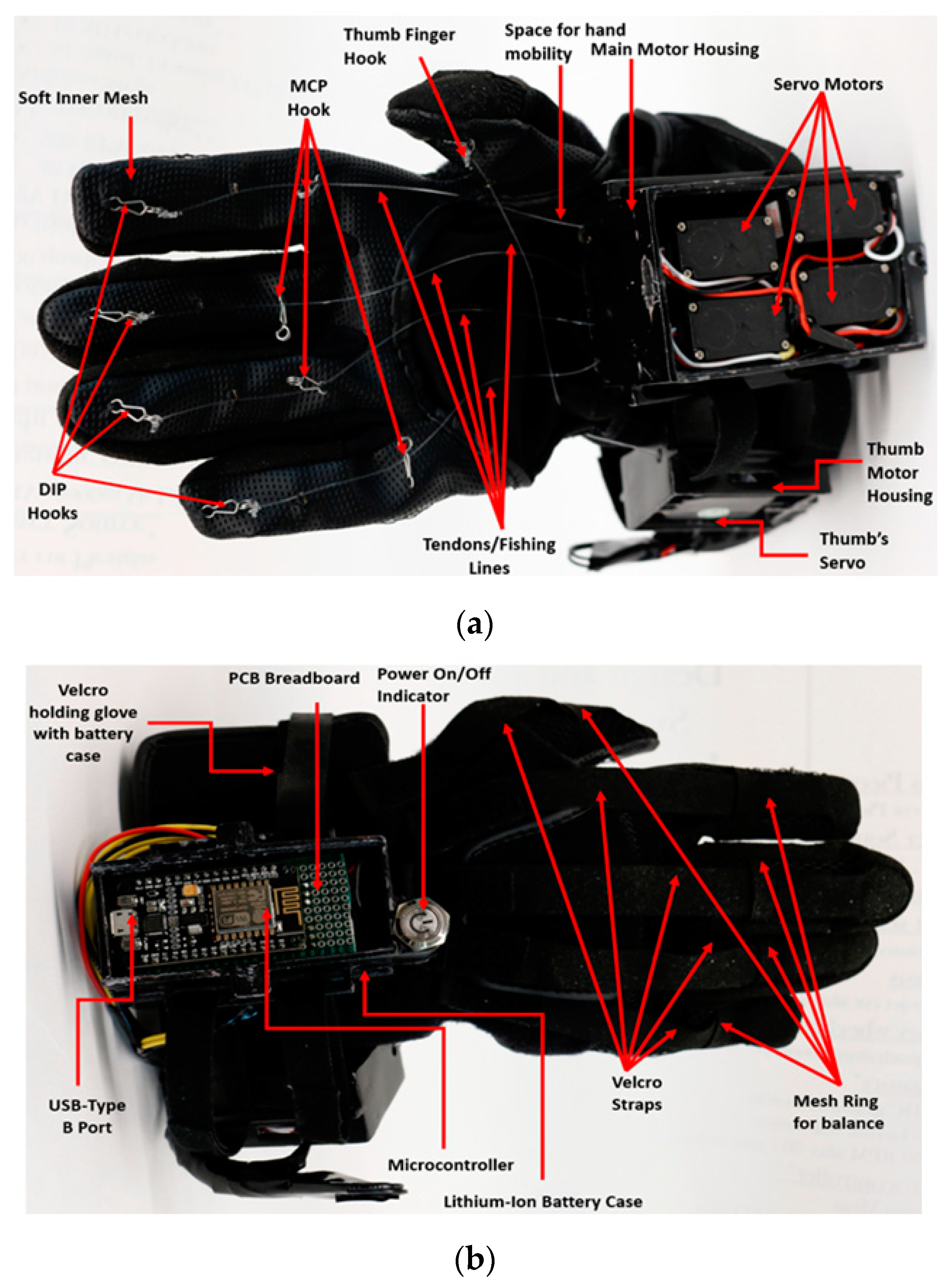
2. Design and Components
2.1. Materials Used in Construction
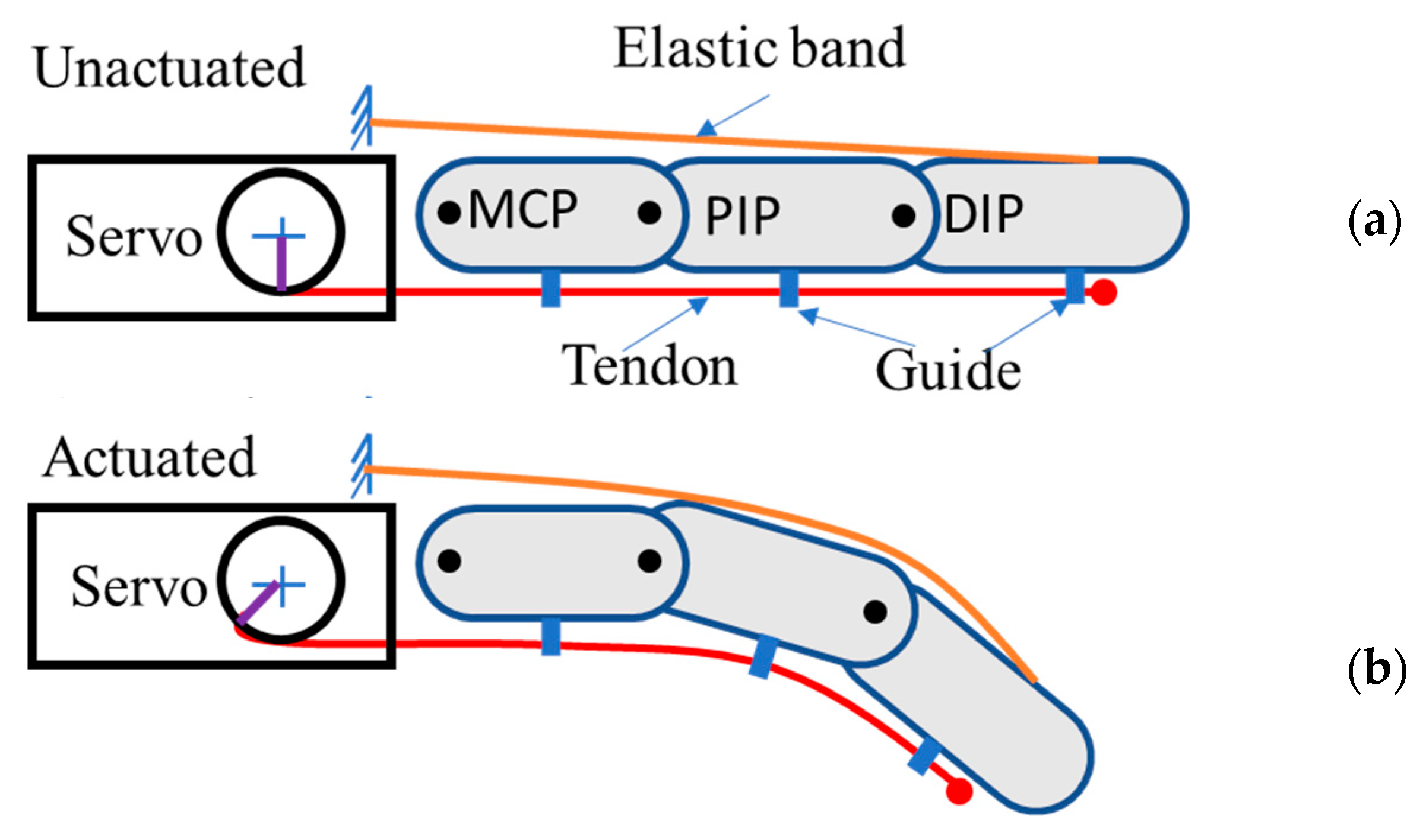
2.2. Prototype and Working Mechanism of the Hand Orthosis
2.3. Servo Motor Selection
3. Initial Characterization of NOHAS (Study 1)
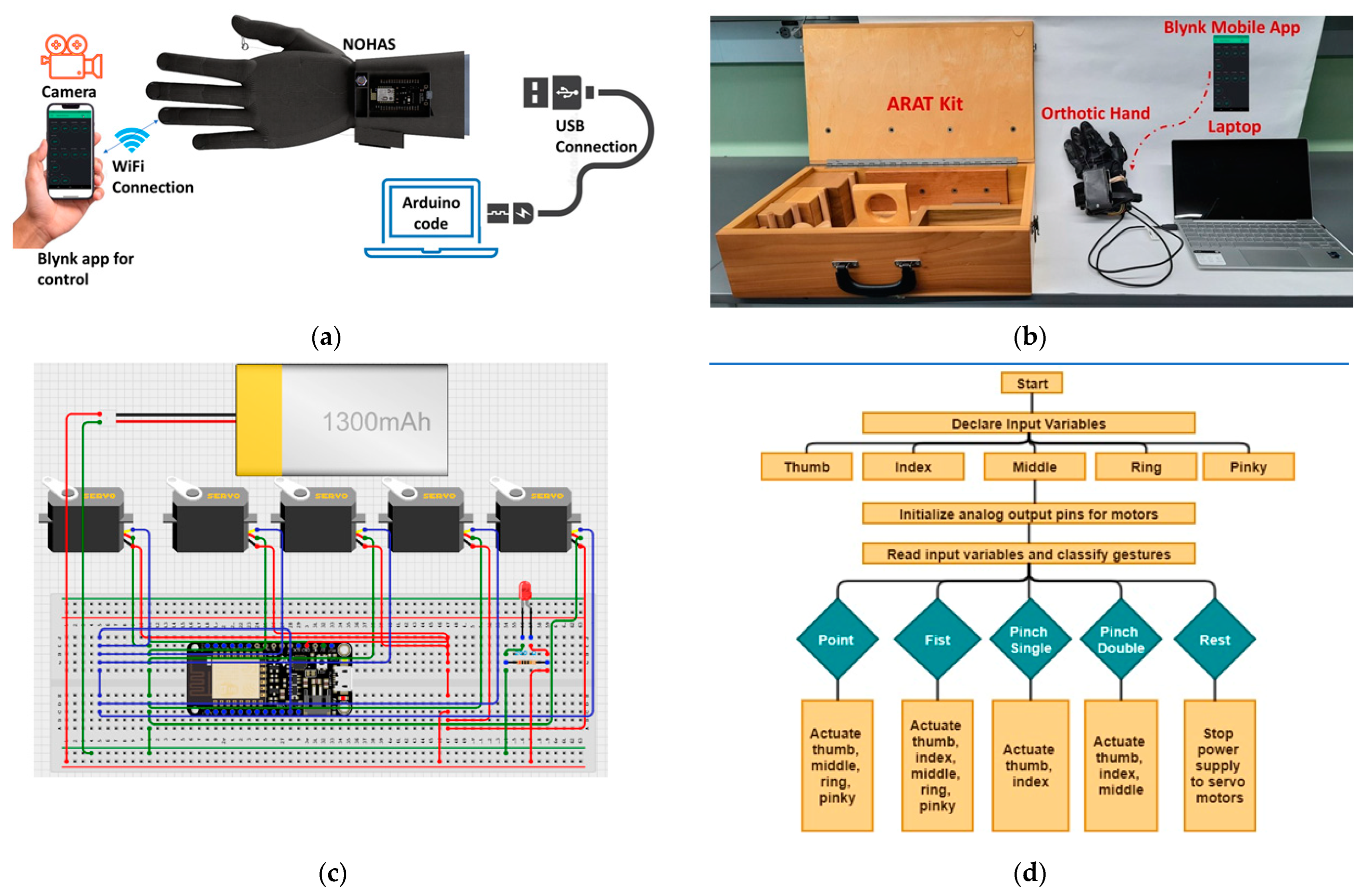
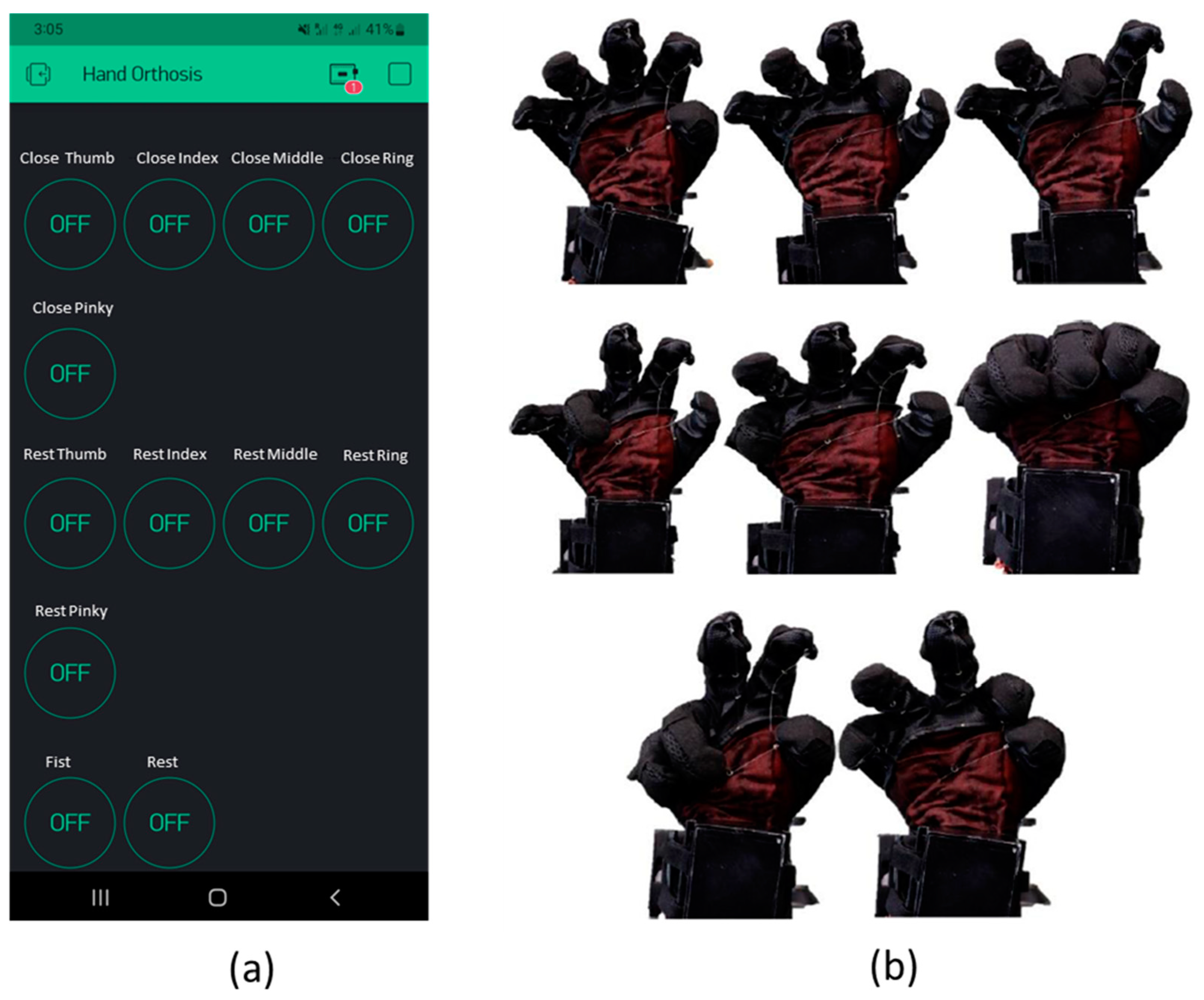
3.1. Basic Gesture Test
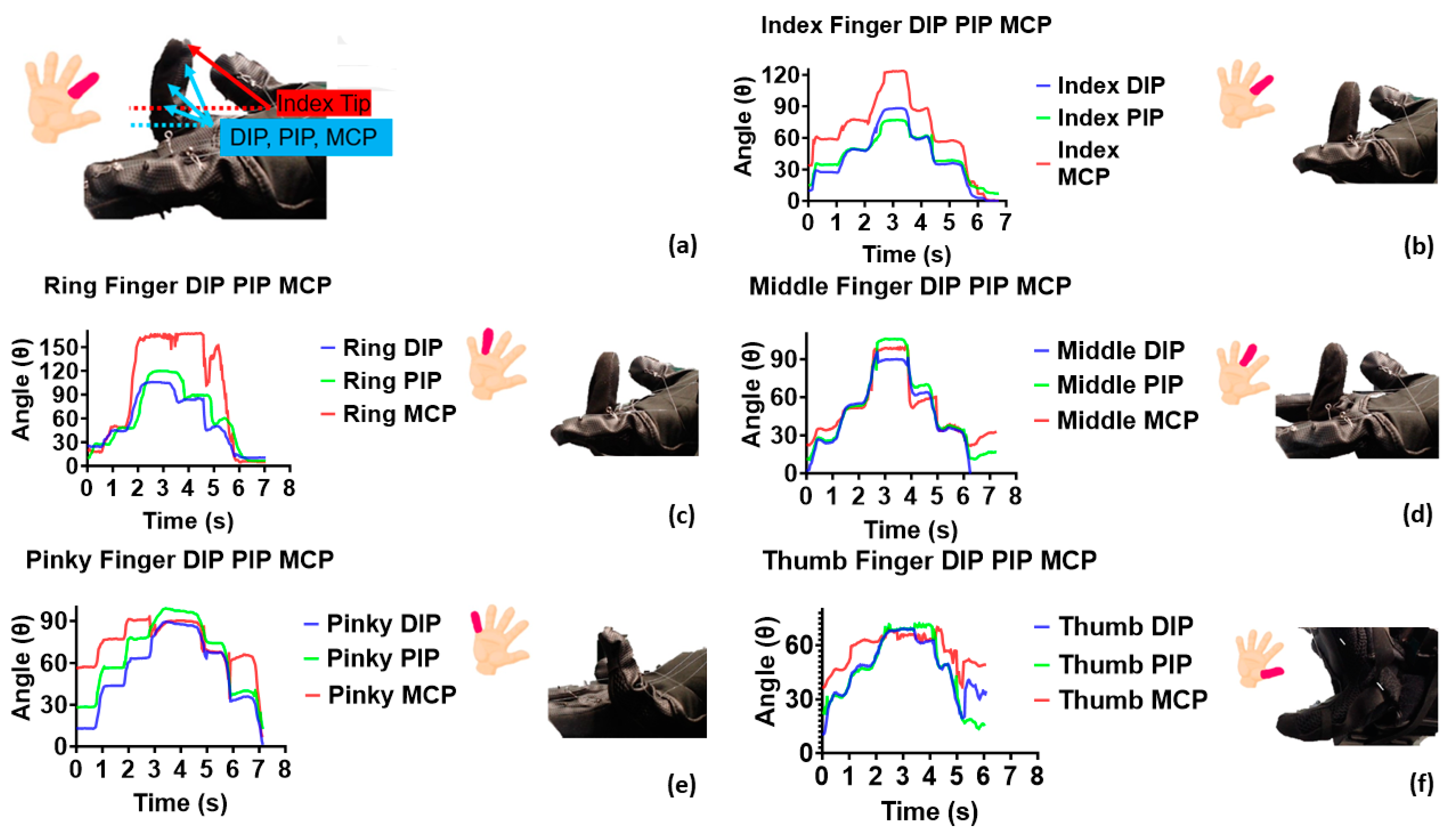
3.2. Agular Position Characterization and Maximum Angle Test
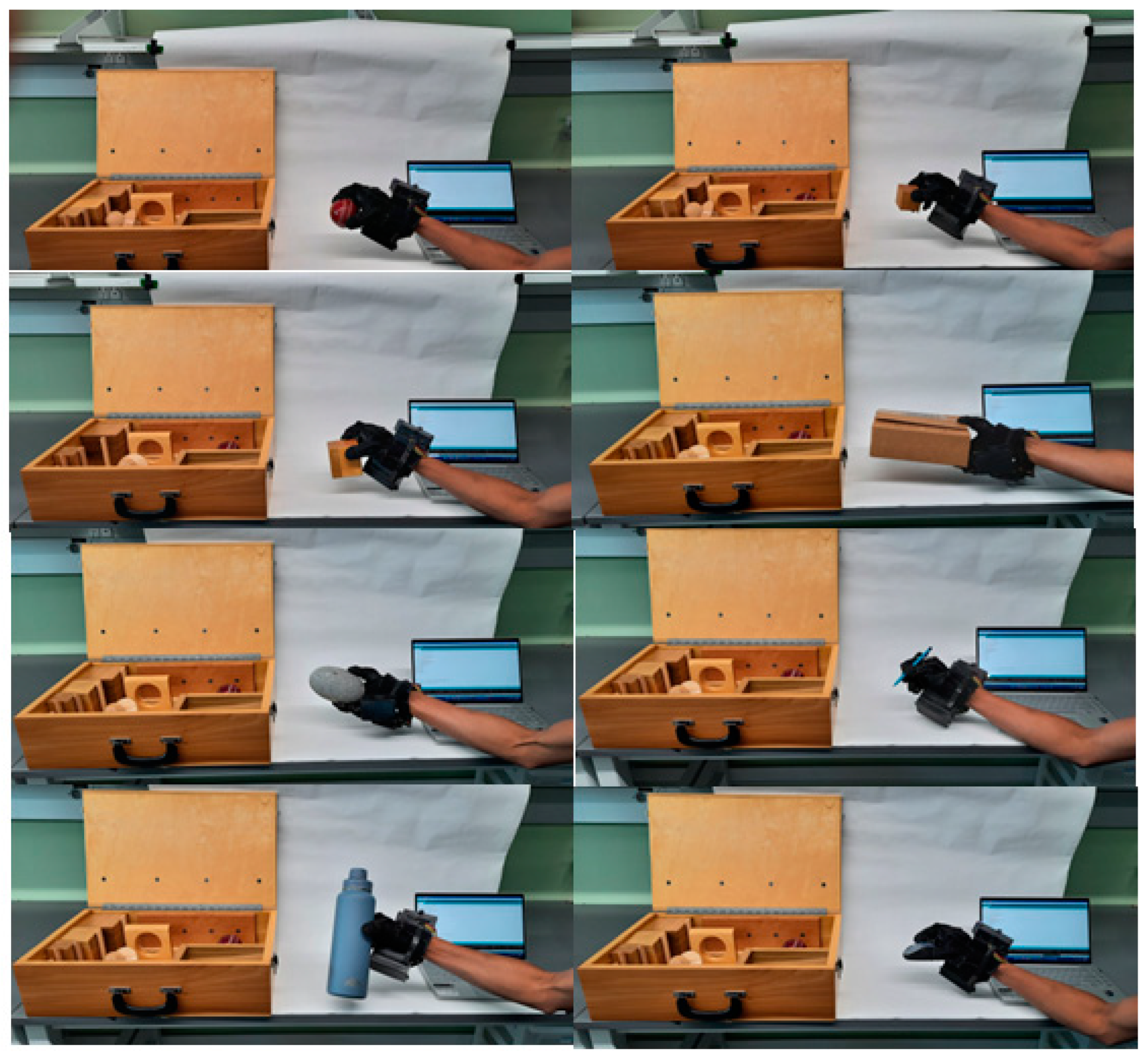
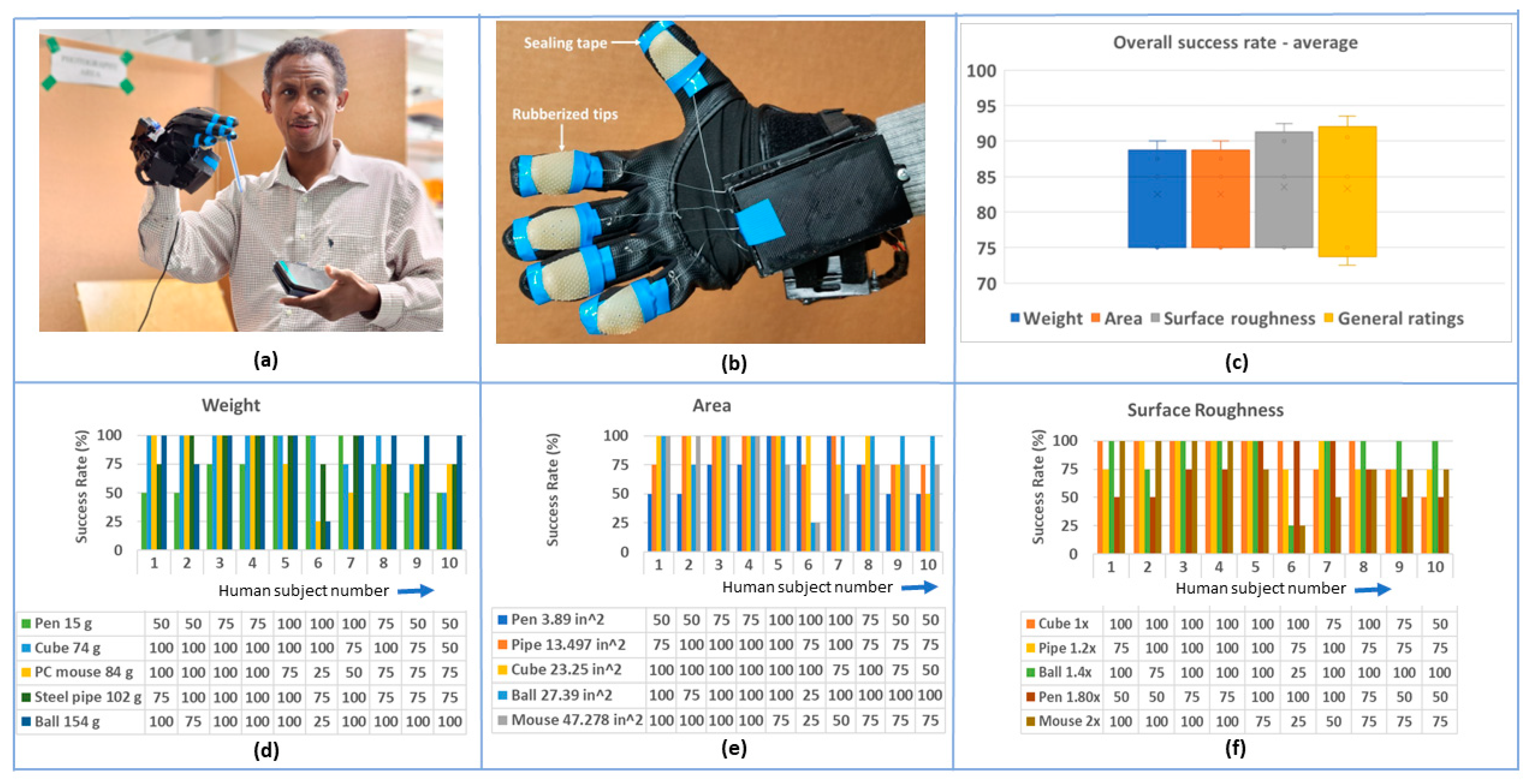
3.3. Standard Object Grasping Test
3.4. Variations in Finger Actuation Timing Test
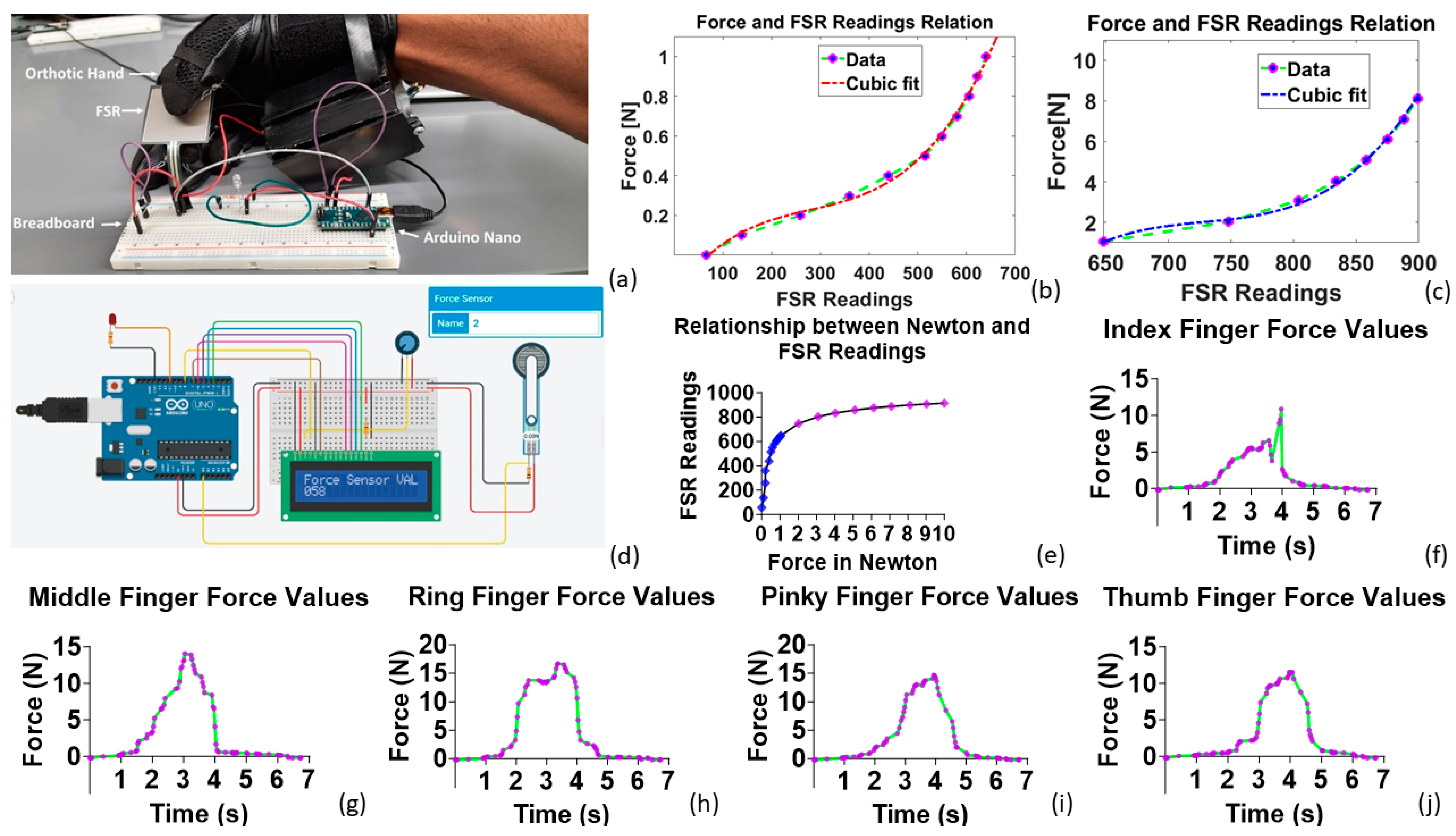
3.5. Force-Sensitive Resistors on NOHAS
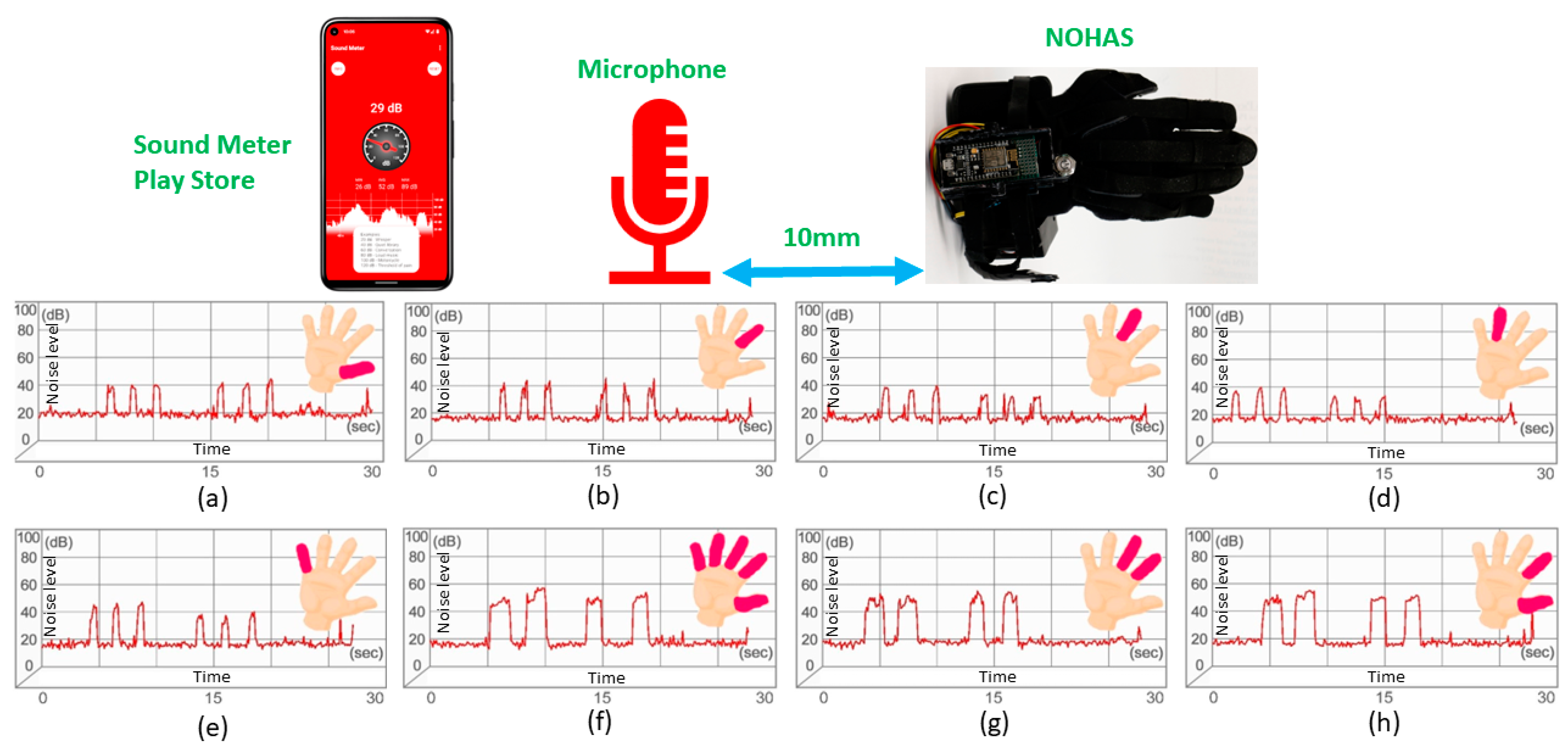
3.6. Servo Noise Measurement Experiment
3.7. Understanding Servo Motor Audio Noise and Overheating
4. Human Subject Testing (Study 2)
4.1. Objective of Human Subject Testing
4.2. Eligibility
4.3. Participant Inclusion and Exclusion Criteria
4.4. Recruitment Method
4.5. Collection of Data
- Participants were asked to come to the HBS lab during their free time and the experimental procedure was explained to them during the first 10 min. The ARAT kit was opened, and the experimenter explained the mobile app layout to the participants. They were allowed to use the mobile app independently and operate the glove. We selected the ARAT kit as it is a frequently used tool in stroke rehabilitation and standard assessment for hand function;
- Next, participants were instructed to wear NOHAS and pick up standard objects from the ARAT kit, which included a ball, boxes of various sizes, plastic hard cups, metal tubes, etc. The entire activity was captured on video, focusing solely on the participants’ hand movements and grasping actions, with their faces excluded from the recording. Throughout the process, participants used a mobile application to control the glove;
- Afterwards, participants were asked to remove the glove and safely place it in the provided location. Participants were not asked any demographic questions. Instead, they were requested to provide a rating as per the consent form, assessing the orthotic hand’s performance on a scale of 4 to 1, where 4 denoted excellent, 3 very good, 2 good, and 1 poor. The entire process took around 15 min;
- Finally, participants were thanked for their time, and they left the lab. The video of this data collection is shown in the overview of NOHAS available on the HBS lab website at the following link: https://youtu.be/RtTiUP9PP94 (accessed on 6 December 2023).
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Donkor, E.S. Stroke in the century: A snapshot of the burden, epidemiology, and quality of life. Stroke Res. Treat. 2018, 2018, 3238165. [Google Scholar]
- Toth, L.; Schiffer, A.; Nyitrai, M.; Pentek, A.; Told, R.; Maroti, P. Developing an anti-spastic orthosis for daily home-use of stroke patients using smart memory alloys and 3D printing technologies. Mater. Des. 2020, 195, 109029. [Google Scholar] [CrossRef]
- Yurkewich, A.; Hebert, D.; Wang, R.H.; Mihailidis, A. Hand extension robot orthosis (HERO) glove: Development and testing with stroke survivors with severe hand impairment. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 916–926. [Google Scholar] [CrossRef] [PubMed]
- Park, C.B.; Park, H.-S. PorTable 3D-printed hand orthosis with spatial stiffness distribution personalized for assisting grasping in daily living. Front. Bioeng. Biotechnol. 2023, 11, 895745. [Google Scholar] [CrossRef] [PubMed]
- Kaskutas, V.; Powell, R. The impact of flexor tendon rehabilitation restrictions on individuals’ independence with daily activities: Implications for hand therapists. J. Hand Ther. 2013, 26, 22–29. [Google Scholar] [CrossRef] [PubMed]
- Dindorf, R.; Wos, P. Using the bioelectric signals to control of wearable orthosis of the elbow joint with bi-muscular pneumatic servo-drive. Robotica 2020, 38, 804–818. [Google Scholar] [CrossRef]
- Cartagena, P.D.; Naranjo, J.E.; Saltos, L.F.; Garcia, C.A.; Garcia, M.V. Multifunctional exoskeletal orthosis for hand rehabilitation based on virtual reality. In Information and Communication Technologies of Ecuador (TIC. EC); Springer: Berlin/Heidelberg, Germany, 2018; pp. 209–221. [Google Scholar]
- Megalingam, R.K.; Manoharan, S.K.; Mohandas, S.M.; Reddy, C.P.K.; Vijay, E.; Naveen, P.N.V.K.; Chandrika, D. Wearable Hand Orthotic Device for Rehabilitation: Hand Therapy with Multi-Mode Control and Real-Time Feedback. Appl. Sci. 2023, 13, 3976. [Google Scholar] [CrossRef]
- Veale, A.J.; Xie, S.Q. Towards compliant and wearable robotic orthoses: A review of current and emerging actuator technologies. Med. Eng. Phys. 2016, 38, 317–325. [Google Scholar] [CrossRef]
- Gretsch, K.F.; Lather, H.D.; Peddada, K.V.; Deeken, C.R.; Wall, L.B.; Goldfarb, C.A. Development of novel 3D-printed robotic prosthetic for transradial amputees. Prosthet. Orthot. Int. 2016, 40, 400–403. [Google Scholar] [CrossRef]
- Dereshgi, H.A.; Hüseyin, D.; Demir, D.; Türe, N.F. Orthoses: A Systematic Review. J. Smart Syst. Res. 2021, 2, 135–149. [Google Scholar]
- Cheng, N.; Phua, K.S.; Lai, H.S.; Tam, P.K.; Tang, K.Y.; Cheng, K.K.; Yeow, R.C.-H.; Ang, K.K.; Guan, C.; Lim, J.H. Brain-computer interface-based soft robotic glove rehabilitation for stroke. IEEE Trans. Biomed. Eng. 2020, 67, 3339–3351. [Google Scholar] [CrossRef]
- Cantillo-Negrete, J.; Carino-Escobar, R.I.; Carrillo-Mora, P.; Rodriguez-Barragan, M.A.; Hernandez-Arenas, C.; Quinzaños-Fresnedo, J.; Hernandez-Sanchez, I.R.; Galicia-Alvarado, M.A.; Miguel-Puga, A.; Arias-Carrion, O. Brain-computer interface coupled to a robotic hand orthosis for stroke patients’ neurorehabilitation: A crossover feasibility study. Front. Hum. Neurosci. 2021, 15, 656975. [Google Scholar] [CrossRef]
- Chowdhury, A.; Raza, H.; Meena, Y.K.; Dutta, A.; Prasad, G. An EEG-EMG correlation-based brain-computer interface for hand orthosis supported neuro-rehabilitation. J. Neurosci. Methods 2019, 312, 1–11. [Google Scholar] [CrossRef]
- Cantillo-Negrete, J.; Carino-Escobar, R.I.; Carrillo-Mora, P.; Elias-Vinas, D.; Gutierrez-Martinez, J. Motor imagery-based brain-computer interface coupled to a robotic hand orthosis aimed for neurorehabilitation of stroke patients. J. Healthc. Eng. 2018, 2018, 1624637. [Google Scholar] [CrossRef] [PubMed]
- Pichiorri, F.; Morone, G.; Petti, M.; Toppi, J.; Pisotta, I.; Molinari, M.; Paolucci, S.; Inghilleri, M.; Astolfi, L.; Cincotti, F.; et al. Brain–computer interface boosts motor imagery practice during stroke recovery. Ann. Neurol. 2015, 77, 851–865. [Google Scholar] [CrossRef] [PubMed]
- King, C.E.; Dave, K.R.; Wang, P.T.; Mizuta, M.; Reinkensmeyer, D.J.; Do, A.H.; Moromugi, S.; Nenadic, Z. Performance assessment of a brain–computer interface driven hand orthosis. Ann. Biomed. Eng. 2014, 42, 2095–2105. [Google Scholar] [CrossRef] [PubMed]
- Delijorge, J.; Mendoza-Montoya, O.; Gordillo, J.L.; Caraza, R.; Martinez, H.R.; Antelis, J.M. Evaluation of a p300-based brain-machine interface for a robotic hand-orthosis control. Front. Neurosci. 2020, 14, 589659. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Mukae, N.; Arata, J.; Iihara, K.; Hashizume, M. Comparison of feature vector compositions to enhance the performance of NIRS-BCI-triggered robotic hand orthosis for post-stroke motor recovery. Appl. Sci. 2019, 9, 3845. [Google Scholar] [CrossRef]
- Dunaway, S.; Dezsi, D.B.; Perkins, J.; Tran, D.; Naft, J. Case report on the use of a custom myoelectric elbow–wrist–hand orthosis for the remediation of upper extremity paresis and loss of function in chronic stroke. Mil. Med. 2017, 182, e1963–e1968. [Google Scholar] [CrossRef] [PubMed]
- Nizamis, K.; Rijken, N.H.; Van Middelaar, R.; Neto, J.; Koopman, B.F.; Sartori, M. Characterization of forearm muscle activation in duchenne muscular dystrophy via high-density electromyography: A case study on the implications for myoelectric control. Front. Neurol. 2020, 11, 231. [Google Scholar] [CrossRef]
- Yoo, H.-J.; Lee, S.; Kim, J.; Park, C.; Lee, B. Development of 3D-printed myoelectric hand orthosis for patients with spinal cord injury. J. Neuroeng. Rehabil. 2019, 16, 162. [Google Scholar] [CrossRef]
- Peters, H.T.; Page, S.J.; Persch, A. Giving them a hand: Wearing a myoelectric elbow-wrist-hand orthosis reduces upper extremity impairment in chronic stroke. Arch. Phys. Med. Rehabil. 2017, 98, 1821–1827. [Google Scholar] [CrossRef] [PubMed]
- Martins, H.V.; Setti, J.; Guimarães, C. Handy Orthotics: Considerations on User-Centered Methodology During Development Stages of Myoelectric Hand Orthosis for Daily Assistance. In XXVII Brazilian Congress on Biomedical Engineering, Proceedings of CBEB 2020, Vitória, Brazil, 26–30 October 2020; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1277–1283. [Google Scholar]
- Pahk, H.J.; Lee, D.S.; Park, J.H. Ultra precision positioning system for servo motor–piezo actuator using the dual servo loop and digital filter implementation. Int. J. Mach. Tools Manuf. 2001, 41, 51–63. [Google Scholar] [CrossRef]
- Sevinc, A. A full adaptive observer for DC servo motors. Turk. J. Electr. Eng. Comput. Sci. 2003, 11, 117–130. [Google Scholar]
- Vukosavic, S.N.; Stojic, M.R. Suppression of torsional oscillations in a high-performance speed servo drive. IEEE Trans. Ind. Electron. 1998, 45, 108–117. [Google Scholar] [CrossRef]
- Chung, K.C.W. Servo speed control of traveling-wave ultrasonic motors using pulse width modulation. Electr. Power Compon. Syst. 2001, 29, 707–722. [Google Scholar]
- Feng, G.-H.; Pan, Y.-L. Establishing a cost-effective sensing system and signal processing method to diagnose preload levels of ball screws. Mech. Syst. Signal Process. 2012, 28, 78–88. [Google Scholar] [CrossRef]
- Ramírez, A.; Garrido, R.; Mondié, S. Velocity control of servo systems using an integral retarded algorithm. ISA Trans. 2015, 58, 357–366. [Google Scholar] [CrossRef] [PubMed]
- Jung, D.; Levy, E.J.; Zhou, D.; Fink, R.; Moshe, J.; Earl, A.; Tsiotras, P. Design and development of a low-cost test-bed for undergraduate education in UAVs. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 2739–2744. [Google Scholar]
- Dutta, D.; Aruchamy, S.; Mandal, S.; Sen, S. Poststroke grasp ability assessment using an intelligent data glove based on action research arm test: Development, algorithms, and experiments. IEEE Trans. Biomed. Eng. 2021, 69, 945–954. [Google Scholar] [CrossRef]
- Kim, D.H.; Lee, Y.; Park, H.-S. Cooperative Hand Therapy via a Soft, Wearable, and Unilateral Telerobotic System. IEEE Trans. Biomed. Eng. 2022, 70, 366–377. [Google Scholar] [CrossRef]
- Coyle, S.; Majidi, C.; LeDuc, P.; Hsia, K.J. Bio-inspired soft robotics: Material selection, actuation, and design. Extrem. Mech. Lett. 2018, 22, 51–59. [Google Scholar] [CrossRef]
- Zhao, H.; Jalving, J.; Huang, R.; Knepper, R.; Ruina, A.; Shepherd, R. A helping hand: Soft orthosis with integrated optical strain sensors and EMG control. IEEE Robot. Autom. Mag. 2016, 23, 55–64. [Google Scholar] [CrossRef]
- Byl, N.N.; Abrams, G.M.; Pitsch, E.; Fedulow, I.; Kim, H.; Simkins, M.; Nagarajan, S.; Rosen, J. Chronic stroke survivors achieve comparable outcomes following virtual task specific repetitive training guided by a wearable robotic orthosis (UL-EXO7) and actual task specific repetitive training guided by a physical therapist. J. Hand Ther. 2013, 26, 343–352. [Google Scholar] [CrossRef] [PubMed]
- Woo, Y.; Jeon, H.; Hwang, S.; Choi, B.; Lee, J. Kinematics variations after spring-assisted orthosis training in persons with stroke. Prosthet. Orthot. Int. 2013, 37, 311–316. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Abel, K.T.; Janecek, J.T.; Chen, Y.; Zheng, K.; Cramer, S.C. Home-based technologies for stroke rehabilitation: A systematic review. Int. J. Med. Inform. 2019, 123, 11–22. [Google Scholar] [CrossRef] [PubMed]
- Hameed, H.K.; Hassan, W.Z.W.; Shafie, S.; Ahmad, S.A.; Jaafar, H. A review on surface electromyography-controlled hand robotic devices used for rehabilitation and assistance in activities of daily living. JPO J. Prosthet. Orthot. 2020, 32, 3–13. [Google Scholar] [CrossRef]
- Gaiser, I.N.; Pylatiuk, C.; Schulz, S.; Kargov, A.; Oberle, R.; Werner, T. The FLUIDHAND III: A multifunctional prosthetic hand. JPO J. Prosthet. Orthot. 2009, 21, 91–96. [Google Scholar] [CrossRef]
- Zuniga, J.M.; Peck, J.; Srivastava, R.; Katsavelis, D.; Carson, A. An open source 3D-printed transitional hand prosthesis for children. JPO J. Prosthet. Orthot. 2016, 28, 103–108. [Google Scholar] [CrossRef]
- Ramaji, R.Y.; Daryabor, A.; Bani, M.A. The effect of ulnar deviation orthosis in patients with zigzag deformity due to rheumatoid hand. JPO J. Prosthet. Orthot. 2021, 33, 203–207. [Google Scholar] [CrossRef]
- Plessis, T.D.; Djouani, K.; Oosthuizen, C. A review of active hand exoskeletons for rehabilitation and assistance. Robotics 2021, 10, 40. [Google Scholar] [CrossRef]
- Qassim, H.M.; Hasan, W.W. A review on upper limb rehabilitation robots. Appl. Sci. 2020, 10, 6976. [Google Scholar] [CrossRef]
- Deng, E.; Tadesse, Y. A soft 3D-printed robotic hand actuated by coiled SMA. Actuators 2020, 10, 6. [Google Scholar] [CrossRef]
- Neto, A.R.; Fajardo, J.; da Silva, W.H.A.; Gomes, M.K.; de Castro, M.C.F.; Fujiwara, E.; Rohmer, E. Design of tendon-actuated robotic glove integrated with optical fiber force myography sensor. Automation 2021, 2, 187–201. [Google Scholar] [CrossRef]
- Singh, A.P.; Palani, D.; Ahmed, O.; Matharu, P.S.; Linn, T.; Nguyen, T.; Tadesse, Y. HBS-1.2: Lightweight Socially Assistive Robot with 6-Ply Twisted Coiled Polymer Muscle-Actuated Hand. Actuators 2023, 12, 312. [Google Scholar] [CrossRef]
- Oña, E.D.; Garcia-Haro, J.M.; Jardón, A.; Balaguer, C. Robotics in health care: Perspectives of robot-aided interventions in clinical practice for rehabilitation of upper limbs. Appl. Sci. 2019, 9, 2586. [Google Scholar] [CrossRef]
- Lin, F.; Ajay, J.; Langan, J.; Cavuoto, L.; Nwogu, I.; Subryan, H.; Xu, W. QM-FOrMS: A portable and cost-effective upper extremity rehabilitation system. Smart Health 2019, 14, 100080. [Google Scholar] [CrossRef]
- Bobin, M.; Bimbard, F.; Boukallel, M.; Anastassova, M.; Ammi, M. SpECTRUM: Smart ECosystem for sTRoke patient’s Upper limbs Monitoring. Smart Health 2019, 13, 100066. [Google Scholar] [CrossRef]
- Park, Y.; Jo, I.; Lee, J.; Bae, J. A dual-cable hand exoskeleton system for virtual reality. Mechatronics 2018, 49, 177–186. [Google Scholar] [CrossRef]
- Marconi, D.; Baldoni, A.; McKinney, Z.; Cempini, M.; Crea, S.; Vitiello, N. A novel hand exoskeleton with series elastic actuation for modulated torque transfer. Mechatronics 2019, 61, 69–82. [Google Scholar] [CrossRef]
- Conti, R.; Meli, E.; Ridolfi, A. A novel kinematic architecture for portable hand exoskeletons. Mechatronics 2016, 35, 192–207. [Google Scholar] [CrossRef]
- Jo, I.; Bae, J. Design and control of a wearable and force-controllable hand exoskeleton system. Mechatronics 2017, 41, 90–101. [Google Scholar] [CrossRef]
- Xiao, F.; Gu, L.; Ma, W.; Zhu, Y.; Zhang, Z.; Wang, Y. Real time motion intention recognition method with limited number of surface electromyography sensors for A 7-DOF hand/wrist rehabilitation exoskeleton. Mechatronics 2021, 79, 102642. [Google Scholar] [CrossRef]
- Achilli, G.M.; Amici, C.; Dragusanu, M.; Gobbo, M.; Logozzo, S.; Malvezzi, M.; Tiboni, M.; Valigi, M.C. Soft, Rigid, and Hybrid Robotic Exoskeletons for Hand Rehabilitation: Roadmap with Impairment-Oriented Rationale for Devices Design and Selection. Appl. Sci. 2023, 13, 11287. [Google Scholar] [CrossRef]
- Nilsen, T.; Hermann, M.; Eriksen, C.S.; Dagfinrud, H.; Mowinckel, P.; Kjeken, I. Grip force and pinch grip in an adult population: Reference values and factors associated with grip force. Scand. J. Occup. Ther. 2012, 19, 288–296. [Google Scholar] [CrossRef] [PubMed]
- Kabir, R.; Sunny, M.S.H.; Ahmed, H.U.; Rahman, M.H. Hand rehabilitation devices: A comprehensive systematic review. Micromachines 2022, 13, 1033. [Google Scholar] [CrossRef] [PubMed]
- Saharan, L.; Wu, L.; Tadesse, Y. Modeling and simulation of robotic finger powered by nylon artificial muscles. J. Mech. Robot. 2020, 12, 14501. [Google Scholar] [CrossRef]
- Ochoa, J.M.; Kamper, D.G.; Listenberger, M.; Lee, S.W. Use of an electromyographically driven hand orthosis for training after stroke. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–5. [Google Scholar]
- Chen, A.; Winterbottom, L.; Park, S.; Xu, J.; Nilsen, D.M.; Stein, J.; Ciocarlie, M. Thumb Stabilization and Assistance in a Robotic Hand Orthosis for Post-Stroke Hemiparesis. IEEE Robot. Autom. Lett. 2022, 7, 8276–8282. [Google Scholar] [CrossRef]
- Saharan, L.; de Andrade, M.J.; Saleem, W.; Baughman, R.H.; Tadesse, Y. iGrab: Hand orthosis powered by twisted and coiled polymer muscles. Smart Mater. Struct. 2017, 26, 105048. [Google Scholar] [CrossRef]
- Schabowsky, C.N.; Godfrey, S.B.; Holley, R.J.; Lum, P.S. Development and pilot testing of HEXORR: Hand EXOskeleton rehabilitation robot. J. Neuroeng. Rehabil. 2010, 7, 1–16. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, S.; Pang, J.; Li, S.; Li, J. Design and experiment of a hand movement device driven by shape memory alloy wires. J. Robot. 2021, 2021, 6611581. [Google Scholar] [CrossRef]
- Chen, Y.; Tan, X.; Yan, D.; Zhang, Z.; Gong, Y. A composite fabric-based soft rehabilitation glove with soft joint for dementia in Parkinson’s disease. IEEE J. Transl. Eng. Health Med. 2020, 8, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Casas, R.; Sandison, M.; Chen, T.; Lum, P.S. Clinical test of a wearable, high DOF, spring powered hand exoskeleton (HandSOME II). IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 1877–1885. [Google Scholar] [CrossRef] [PubMed]
- Peperoni, E.; Capitani, S.L.; Fiumalbi, T.; Capotorti, E.; Baldoni, A.; Dell’Agnello, F.; Creatini, I.; Taglione, E.; Vitiello, N.; Trigili, E.; et al. Self-Aligning Finger Exoskeleton for the Mobilization of the Metacarpophalangeal Joint. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 884–894. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Xie, H.; Shi, J. A novel motion-coupling design for a jointless tendon-driven finger exoskeleton for rehabilitation. Mech. Mach. Theory 2016, 99, 83–102. [Google Scholar] [CrossRef]
- Aguilar-Marín, P.; Chavez-Bacilio, M.; Jáuregui-Rosas, S. Using analog instruments in Tracker video-based experiments to understand the phenomena of electricity and magnetism in physics education. Eur. J. Phys. 2018, 39, 35204. [Google Scholar] [CrossRef]
- Nurmayanti, D.; Jumadi, J.; Wilujeng, I.; Kuswanto, H. Developing of Learning Instruments based on Software Tracker in Measuring Cognitive Learning Outcomes. J. Phys. Conf. Ser. 2019, 1233, 12047. [Google Scholar] [CrossRef]
- Bastos, R.O. Practical measurements in radioactivity with the electroscope and the Tracker software. Phys. Educ. 2020, 55, 55007. [Google Scholar] [CrossRef]
- Wilujeng, I.; Kuswanto, H. Developing learning instruments using tracker in measuring students’ science process skills. J. Phys. Conf. Ser. 2019, 1233, 12053. [Google Scholar]
- Chiriacescu, B.; Chiriacescu, F.S.; Miron, C.; Berlic, C.; Barna, V. Arduino and tracker video–didactic tools for study of the kater pendulum physical experiment. Rom. Rep. Phys. 2020, 72, 1–14. [Google Scholar]
- Matharu, P.S.; Wang, Z.; Costello, J.H.; Colin, S.P.; Baughman, R.H.; Tadesse, Y.T. SoJel–A 3D printed jellyfish-like robot using soft materials for underwater applications. Ocean. Eng. 2023, 279, 114427. [Google Scholar] [CrossRef]
- Hamidi, A.; Almubarak, Y.; Rupawat, Y.M.; Warren, J.; Tadesse, Y. Poly-Saora robotic jellyfish: Swimming underwater by twisted and coiled polymer actuators. Smart Mater. Struct. 2020, 29, 45039. [Google Scholar] [CrossRef]
- Joshi, A.; Kulkarni, A.; Tadesse, Y. FludoJelly: Experimental study on jellyfish-like soft robot enabled by soft pneumatic composite (SPC). Robotics 2019, 8, 56. [Google Scholar] [CrossRef]
- Yun, Y.; Dancausse, S.; Esmatloo, P.; Serrato, A.; Merring, C.A.; Deshpande, A.D. An EMG-driven assistive hand exoskeleton for spinal cord injury patients: Maestro. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017. [Google Scholar]
- Using and FSR. Available online: https://learn.adafruit.com/force-sensitive-resistor-fsr/using-an-fsr (accessed on 29 July 2012).
- Tadesse, Y. Actuation technologies suitable for humanoid robots. In Proceedings of the ASME 2012 International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 9–15 November 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; pp. 1–10. [Google Scholar]
- Tadesse, Y. Electroactive polymer and shape memory alloy actuators in biomimetics and humanoids. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 10–14 March 2013; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; p. 868709. [Google Scholar]
- Wu, L.; Chauhan, I.; Tadesse, Y. A Novel Soft Actuator for the Musculoskeletal System. Adv. Mater. Technol. 2018, 3, 1700359. [Google Scholar] [CrossRef]
- Moore, D.; Tennent, H.; Martelaro, N.; Ju, W. Making noise intentional: A study of servo sound perception. In Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; pp. 12–21. [Google Scholar]
- Heo, P.; Kim, J. Power-assistive finger exoskeleton with a palmar opening at the fingerpad. IEEE Trans. Biomed. Eng. 2014, 61, 2688–2697. [Google Scholar] [CrossRef] [PubMed]
- Miller, L.C.; Ruiz-Torres, R.; Stienen, A.H.; Dewald, J.P. A wrist and finger force sensor module for use during movements of the upper limb in chronic hemiparetic stroke. IEEE Trans. Biomed. Eng. 2009, 56, 2312–2317. [Google Scholar] [CrossRef] [PubMed]
- Murphy, E.; King, E.A. Testing the accuracy of smartphones and sound level meter applications for measuring environmental noise. Appl. Acoust. 2016, 106, 16–22. [Google Scholar] [CrossRef]
- Murphy, E.; Eoin, K.; Rauhusen, S. Exploring the accuracy of smartphone applications for measuring environmental noise. In Proceedings of the 44th International Congress on Noise Control Engineering, San Francisco, CA, USA, 9–12 August 2015. [Google Scholar]
- Lee, P.J.; Hampton, T. Smartphone applications for measuring noise in the intensive care unit: A feasibility study. J. Crit. Care 2024, 79, 154435. [Google Scholar] [CrossRef]
- Lapresa, M.; Lauretti, C.; Scotto di Luzio, F.; Bressi, F.; Santacaterina, F.; Bravi, M.; Guglielmelli, E.; Zollo, L.; Cordella, F. Development and Validation of a System for the Assessment and Recovery of Grip Force Control. Bioengineering 2023, 10, 63. [Google Scholar] [CrossRef]
- Lauretti, C.; Cordella, F.; Tamantini, C.; Gentile, C.; di Luzio, F.S.; Zollo, L. A surgeon-robot shared control for ergonomic pedicle screw fixation. IEEE Robot. Autom. Lett. 2020, 5, 2554–2561. [Google Scholar] [CrossRef]
- Tamantini, C.; Cordella, F.; Lauretti, C.; di Luzio, F.S.; Campagnola, B.; Cricenti, L.; Bravi, M.; Bressi, F.; Draicchio, F.; Sterzi, S.; et al. Tailoring upper-limb robot-aided orthopedic rehabilitation on patients’ psychophysiological state. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3297–3306. [Google Scholar] [CrossRef]
- Tamantini, C.; di Luzio, F.S.; Hromei, C.D.; Cristofori, L.; Croce, D.; Cammisa, M.; Cristofaro, A.; Marabello, M.V.; Basili, R.; Zollo, L. Integrating Physical and Cognitive Interaction Capabilities in a Robot-Aided Rehabilitation Platform. IEEE Syst. J. 2023. [Google Scholar] [CrossRef]
- Gloreha Company, a Hand Rehabilitation Company Based in Italy. Available online: https://www.gloreha.us/ (accessed on 24 November 2023).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Weight (grams) | Texture | Size | Dimensions (Length × Width × Height) mm | Weight: Type | Effective Time of Holding |
|---|---|---|---|---|---|---|
| Pen | 15 | Smooth | Small | 140 × 10 × 10 | Light | Until battery drains out |
| Box-Small | 74 | Smooth | Small | 57 × 57 × 57 | Light | Until battery drains out |
| PC Mouse | 84 | Rough | Medium | 100 × 60 × 40 | Light | Until battery drains out |
| Cardboard box | 107 | Rough | Big | 300 × 200 × 100 | Medium | 5 min |
| Ball-Stitched | 154 | Smooth | Medium | 88.9 (diameter) | Medium | 30 min |
| Box-Big | 229 | Smooth | Big | 500 × 250 × 150 | Medium | 10 min |
| Water Bottle Empty | 483 | Smooth | Big | 260 × 70 | Heavy | 1 min |
| Water Bottle Filled | 1566 | Smooth | Big | 260 × 70 | Heavy | 25 s |
| Decoration stone | 1862 | Rough | Big | 200 × 100 × 50 | Heavy | 15 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Selvaraj Mercyshalinie, E.R.; Ghadge, A.; Ifejika, N.; Tadesse, Y. NOHAS: A Novel Orthotic Hand Actuated by Servo Motors and Mobile App for Stroke Rehabilitation. Robotics 2023, 12, 169. https://doi.org/10.3390/robotics12060169
Selvaraj Mercyshalinie ER, Ghadge A, Ifejika N, Tadesse Y. NOHAS: A Novel Orthotic Hand Actuated by Servo Motors and Mobile App for Stroke Rehabilitation. Robotics. 2023; 12(6):169. https://doi.org/10.3390/robotics12060169
Chicago/Turabian StyleSelvaraj Mercyshalinie, Ebenezer Raj, Akash Ghadge, Nneka Ifejika, and Yonas Tadesse. 2023. "NOHAS: A Novel Orthotic Hand Actuated by Servo Motors and Mobile App for Stroke Rehabilitation" Robotics 12, no. 6: 169. https://doi.org/10.3390/robotics12060169
APA StyleSelvaraj Mercyshalinie, E. R., Ghadge, A., Ifejika, N., & Tadesse, Y. (2023). NOHAS: A Novel Orthotic Hand Actuated by Servo Motors and Mobile App for Stroke Rehabilitation. Robotics, 12(6), 169. https://doi.org/10.3390/robotics12060169