Reconfiguration Analysis of a 3-DOF Parallel Mechanism


Abstract
:1. Introduction
2. Mathematical Preamble
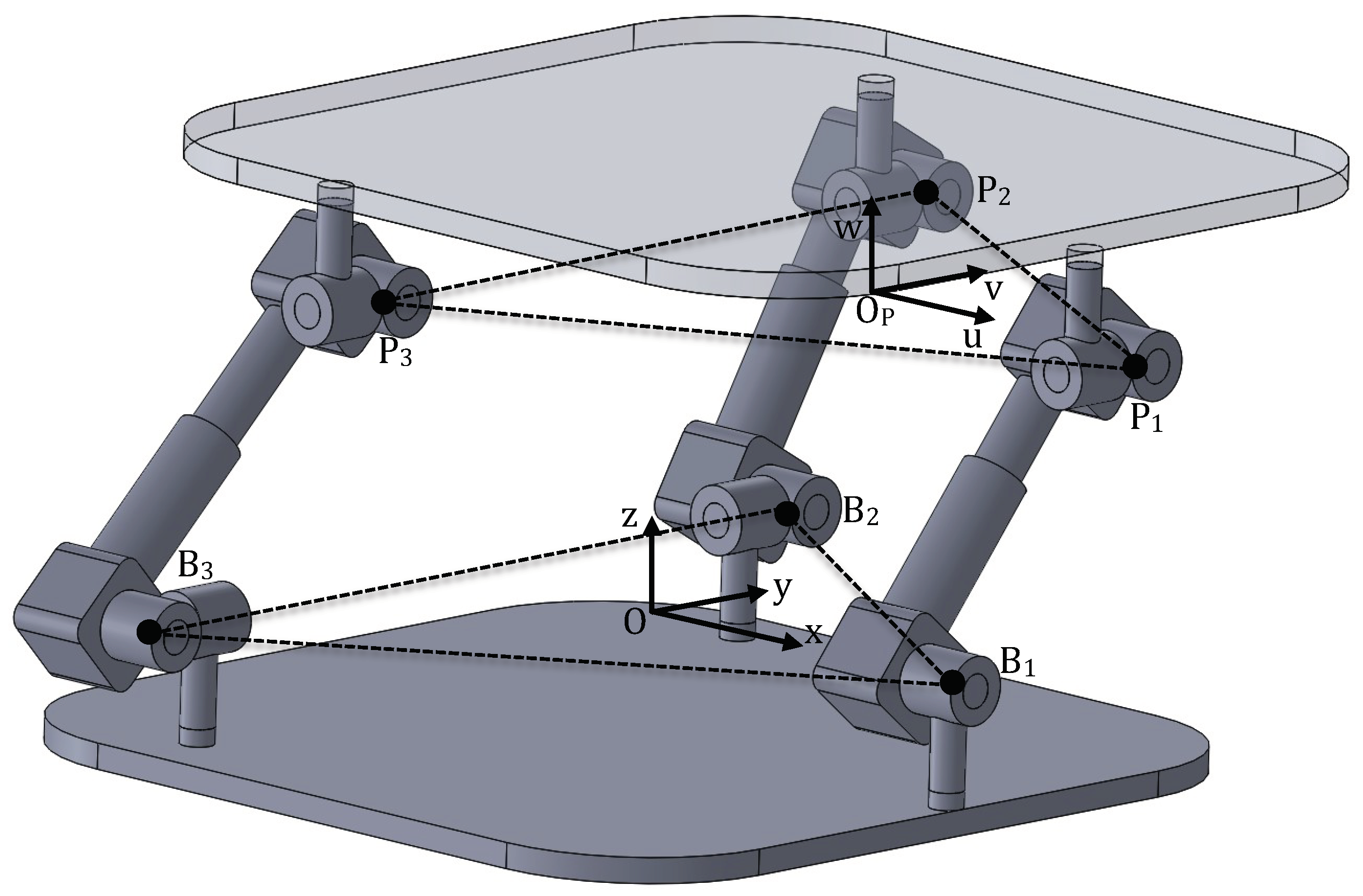
3. Description of the 1-RPU−2-UPU PM
4. Reconfiguration Analysis
- Leg 1: RPU. This leg provides two constraint conditions:
- The R joint-axis at the base is perpendicular to R joint-axis attached to the moving platform:
- The R joint-axis connected to the moving platform belongs to the plane :
- Legs 2 and 3: UPU. Each of these legs provide one constraint condition. The constraint condition is the same for both the legs.
- The R joints-axes attached to the base and the R joints-axes attached to the moving platform are coplanar:where or , depending on which leg is considered.
4.1. Operation Modes
4.2. Transition Configurations
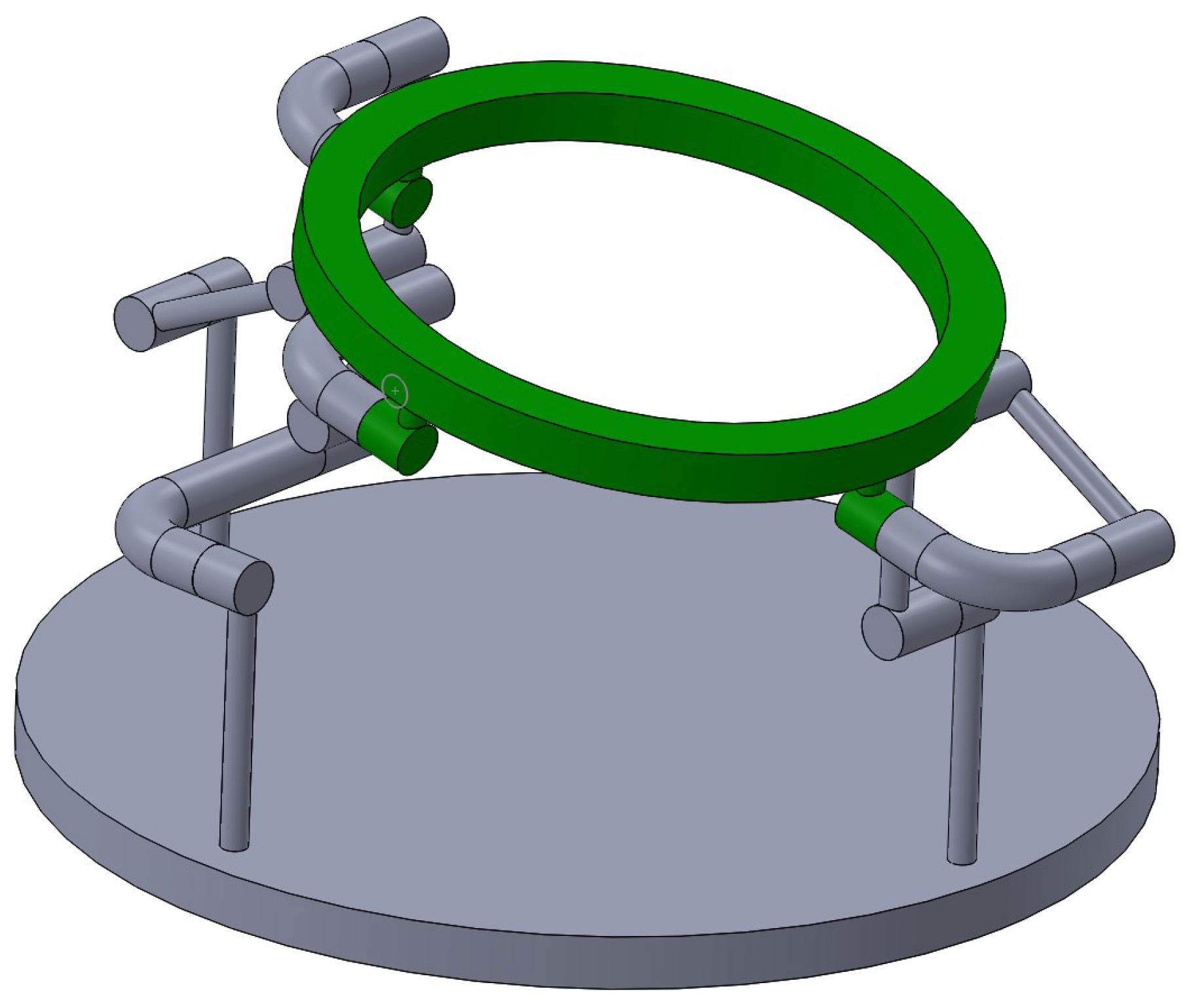
- Transition configuration between Mode I and Mode II:The constraint equations are:This configuration represents any translation on the plane.Its transformation matrix is: , where denotes the unity matrix and .Figure 1 shows the PM at the transition configuration.
- Other transition configurationsThere can be no transitions between Mode I and Mode III or Mode II and Mode III that can be physically reached. It can be noticed that Solution IV is the transition configuration between Mode I and Mode II when the rotation about -axis is .
5. Reconfiguration Analysis: Non-Identical Case
6. Other PMs Architectures
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ding, X.; Kong, X.; Dai, J.S. Advances in Reconfigurable Mechanisms and Robots II; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Kong, X.; Gosselin, C.; Richard, P.L. Type synthesis of parallel mechanisms with multiple operation modes. J. Mech. Des. 2007, 129, 595–601. [Google Scholar] [CrossRef]
- Kong, X. Type synthesis of 3-DOF parallel manipulators with both a planar operation mode and a spatial translational operation mode. J. Mech. Robot. 2013, 5, 041015-1–041015-8. [Google Scholar] [CrossRef]
- Fanghella, P.; Galletti, C.; Gianotti, E. Parallel robots that change their group of motion. In Advances in Robot Kinematics; Lenarcic, J., Roth, B., Eds.; Springer: Dordrecht, The Netherlands, 2006; pp. 49–56. [Google Scholar]
- Refaat, S.; Hervé, J.M.; Nahavandi, S.; Trinh, H. Two-mode overconstrained three-DOFs rotational-translational linear-motor-based parallel kinematics mechanism for machine tool applications. Robotica 2007, 25, 461–466. [Google Scholar] [CrossRef]
- Li, Q.; Hervé, J.M. Parallel mechanisms with bifurcation of Schoenflies motion. IEEE Trans. Robot. 2009, 25, 158–164. [Google Scholar]
- Gogu, G. Maximally regular T2R1-type parallel manipulators with bifurcated spatial motion. J. Mech. Robot. 2011, 3, 011010-1–011010-8. [Google Scholar] [CrossRef]
- Kong, X. Reconfiguration analysis of a 3-DOF parallel mechanism using Euler parameter quaternions and algebraic geometry method. Mech. Mach. Theory 2014, 74, 188–201. [Google Scholar] [CrossRef]
- Kong, X. Reconfiguration analysis of a 4-DOF 3-RER parallel manipulator with equilateral triangular base and moving platform. Mech. Mach. Theory 2016, 98, 180–189. [Google Scholar] [CrossRef]
- Kong, X. Reconfiguration Analysis of Multimode Single-Loop Spatial Mechanisms Using Dual Quaternions. ASME J. Mech. Robot. 2017, 9, 051002-1–051002-8. [Google Scholar] [CrossRef]
- Carbonari, L.; Callegari, M.; Palmieri, G.; Palpacelli, M.C. A new class of reconfigurable parallel kinematic machines. Mech. Mach. Theory 2014, 79, 173–183. [Google Scholar] [CrossRef]
- Carbonari, L.; Callegari, M.; Palmieri, G.; Palpacelli, M.C. Analysis of kinematics and reconfigurability of a spherical parallel manipulator. IEEE Trans.Robot. 2014, 30, 1541–1547. [Google Scholar] [CrossRef]
- Nurahmi, L.; Schadlbauer, J.; Caro, S.; Husty, M.; Wenger, P. Kinematic analysis of the 3-RPS cube parallel manipulator. J. Mech. Robot. 2015, 7, 011008-1–011008-11. [Google Scholar] [CrossRef]
- Cox, D.A.; Little, J.B.; O’Shea, D. Ideals, Varieties, and Algorithms; Springer: New York, NY, USA, 2007. [Google Scholar]
- Sommese, A.J.; Wampler, C.W. The Numerical Solution of Systems of Polynomials Arising in Engineering and Science; World Scientific Press: Singapore, 2005. [Google Scholar]
- Decker, W.; Pfister, G. A First Course in Computational Algebraic Geometry; Cambridge University Press: New York, NY, USA, 2013. [Google Scholar]
- Kong, X. A variable-DOF single-loop 7R spatial mechanism with five motion modes. Mech. Mach. Theory 2018, 120, 239–249. [Google Scholar] [CrossRef]
- Walter, D.R.; Husty, M.L. Kinematic analysis of the TSAI 3-UPU parallel manipulator using algebraic methods. In Proceedings of the 13th IFToMM World Congress in Mechanism and Machine Science, Guanajuato, Mexico, 19–25 June 2011; pp. 1–10. [Google Scholar]
- Schadlbauer, J.; Walter, D.R.; Husty, M. The 3-RPS parallel manipulator from an algebraic viewpoint. Mech. Mach. Theory 2014, 75, 161–176. [Google Scholar] [CrossRef]
- Walter, D.R.; Husty, M.L.; Pfurner, M. Chapter A: Complete Kinematic Analysis of the SNU3-UPU Parallel Manipulator, Contemporary Mathematics; American Mathematical Society: Providence, RI, USA, 2009; Volume 496, pp. 331–346. [Google Scholar]
- Nurahmi, L.; Caro, S.; Wenger, P.; Schadlbauer, J.; Husty, M. Reconfiguration analysis of a 4-RUU parallel manipulator. Mech. Mach. Theory 2016, 96, 269–289. [Google Scholar] [CrossRef] [Green Version]
- Kong, X. Reconfiguration Analysis of a Variable Degrees-of-Freedom Parallel Manipulator With Both 3-DOF Planar and 4-DOF 3T1R Operation Modes. In Proceedings of the ASME 40th Mechanisms and Robotics Conference, Charlotte, NC, USA, 21–24 August 2016. [Google Scholar]
- Ruggiu, M.; Kong, X. Mobility and kinematic analysis of a parallel mechanism with both PPR and planar operation modes. Mech. Mach. Theory 2012, 55, 77–90. [Google Scholar] [CrossRef]
- Spring, K.W. Euler parameters and the use of quaternion algebra in the manipulation of finite rotations: A review. Mech. Mach. Theory 1986, 21, 365–373. [Google Scholar] [CrossRef]
- Kong, X.; Gosselin, C.M. Type Synthesis of Parallel Mechanisms; Springer: Berlin, Germany, 2007. [Google Scholar]
- Chablat, D.; Kong, X.; Zhang, C. Kinematics, Workspace, and Singularity Analysis of a Parallel Robot with Five Operation Modes. J. Mech. Robot. 2018, 10, 035001-1–035001-12. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode III: | : | . | Half-turn rotation about the z-axis. |
| Solution IV: | : | . | Half-turn rotation about the y-axis. |
| Solution V: | : | . | Half-turn rotation about the x-axis followed by a rotation by about the y-axis. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruggiu, M.; Kong, X. Reconfiguration Analysis of a 3-DOF Parallel Mechanism. Robotics 2019, 8, 66. https://doi.org/10.3390/robotics8030066
Ruggiu M, Kong X. Reconfiguration Analysis of a 3-DOF Parallel Mechanism. Robotics. 2019; 8(3):66. https://doi.org/10.3390/robotics8030066
Chicago/Turabian StyleRuggiu, Maurizio, and Xianwen Kong. 2019. "Reconfiguration Analysis of a 3-DOF Parallel Mechanism" Robotics 8, no. 3: 66. https://doi.org/10.3390/robotics8030066
APA StyleRuggiu, M., & Kong, X. (2019). Reconfiguration Analysis of a 3-DOF Parallel Mechanism. Robotics, 8(3), 66. https://doi.org/10.3390/robotics8030066