Pinch Grasp and Suction for Delicate Object Manipulations Using Modular Anthropomorphic Robotic Gripper with Soft Layer Enhancements




Abstract
:1. Introduction
2. System Description
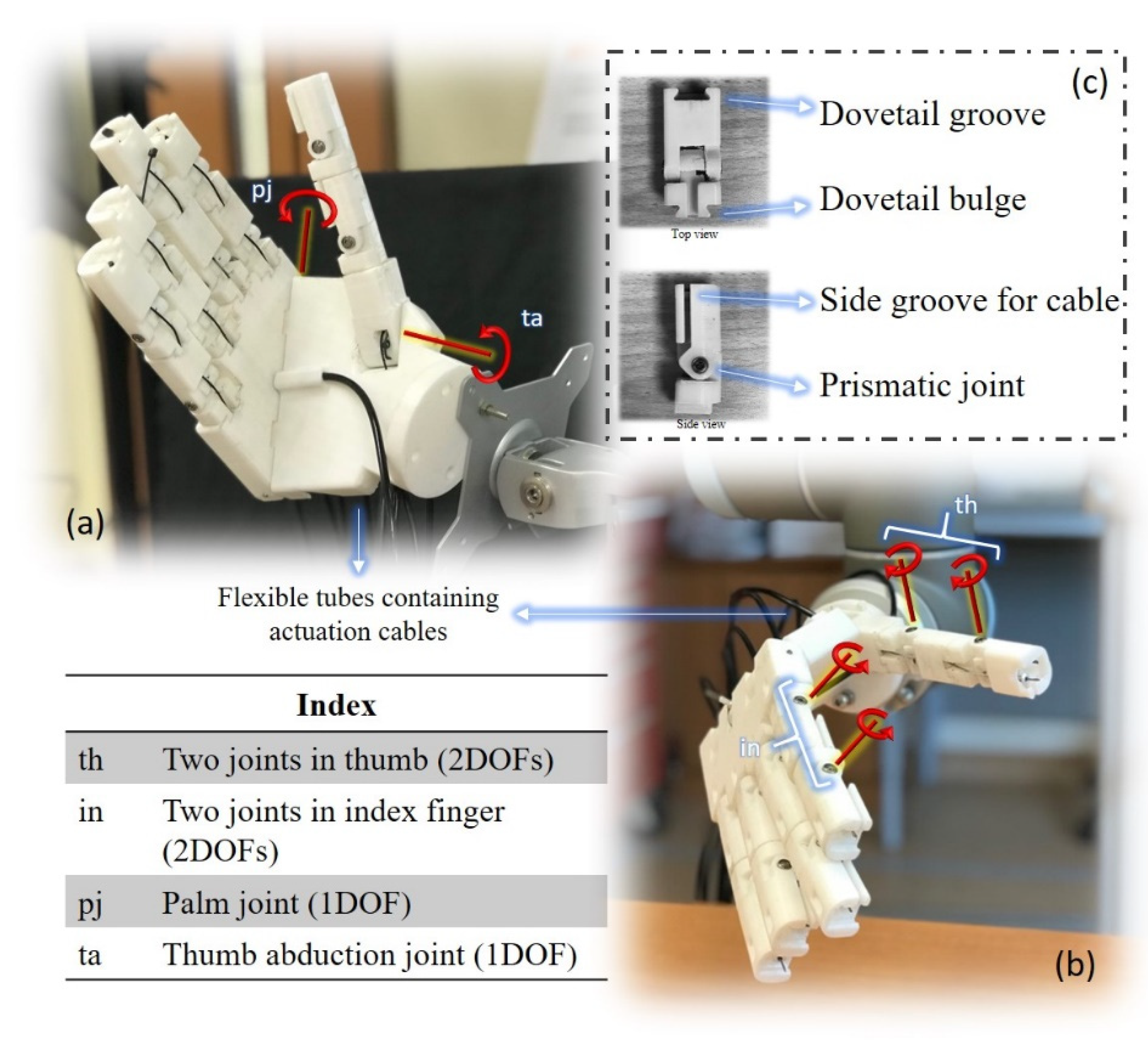
2.1. Modular Finger Structure
2.2. Soft Enhancement Layers
2.3. Actuation and Control
3. Experiments and Procedures
3.1. Pinch Grasp Experiments
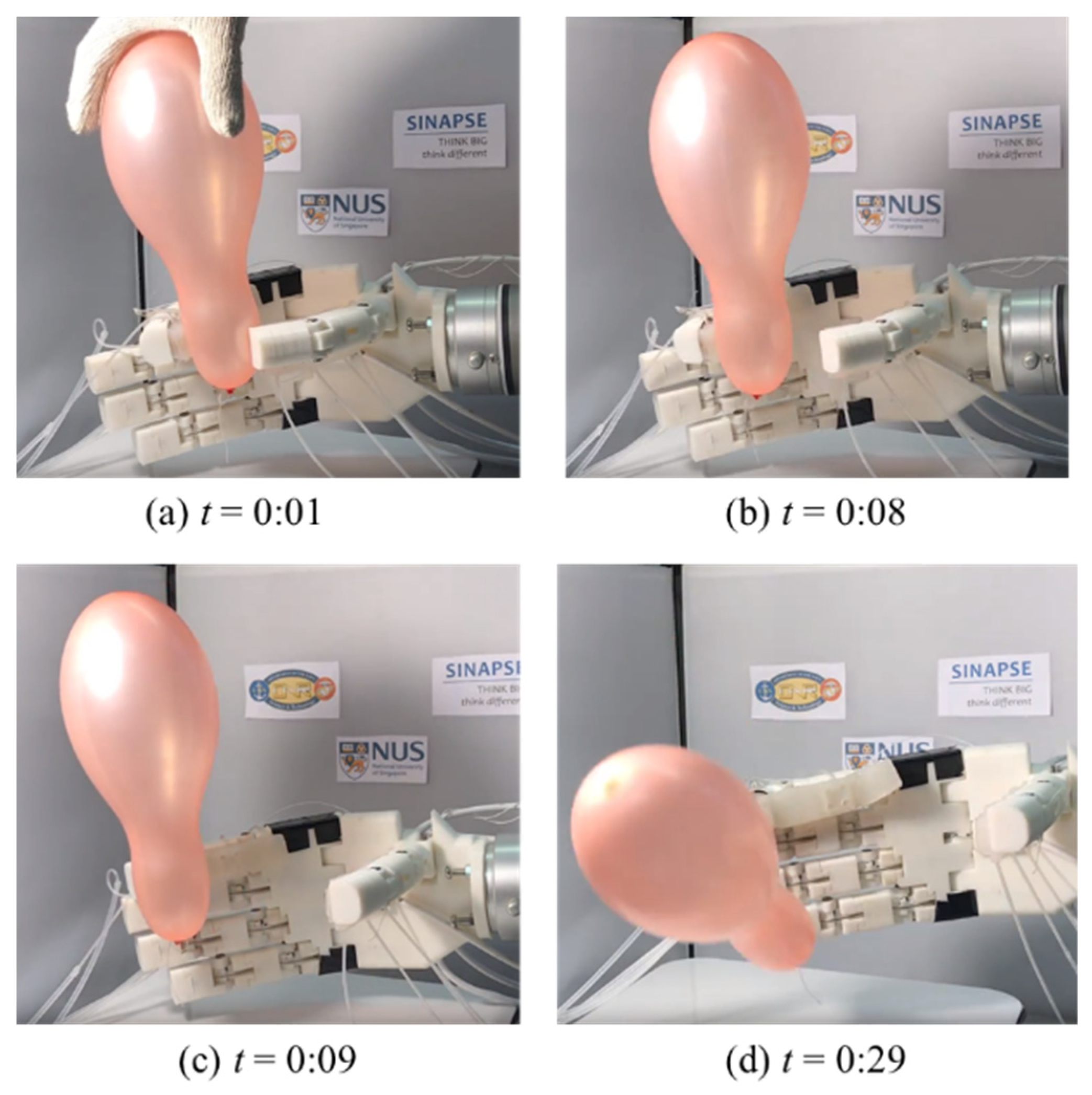
3.2. Suction Experiments
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Townsend, W. The BarrettHand Grasper–programmably flexible part handling and assembly. Ind. Robot. Int. J. 2000, 27, 181–188. [Google Scholar] [CrossRef]
- Mouri, T.; Kawasaki, H.; Yoshikawa, K.; Takai, J.; Ito, S. Anthropomorphic robot hand: Gifu hand III. In Proceedings of the 2002 International Conference on Control, Automation and Systems (ICCAS), Jeonbuk, Korea, 16–19 October 2002; pp. 1288–1293. [Google Scholar]
- Martin, J.; Grossard, M. Design of a fully modular and backdrivable dexterous hand. Int. J. Robot. Res. 2014, 33, 783–798. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tan, N.; Gu, X.; Ren, H. Design, characterization and applications of a novel soft actuator driven by flexible shafts. Mech. Mach. Theory 2018, 122, 197–218. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. Soft hands for reliable grasping strategies. In Soft Robot; Springer: Berlin/Heidelberg, Germany, 2015; pp. 211–221. [Google Scholar]
- Birglen, L.; Gosselin, C.M. Kinetostatic analysis of underactuated fingers. IEEE Trans. Robot. Autom. 2004, 20, 211–221. [Google Scholar] [CrossRef]
- Li, C.; Gu, X.; Ren, H. A cable-driven flexible robotic grasper with lego-like modular and reconfigurable joints. IEEE/ASME Trans. Mechatron. 2017, 22, 2757–2767. [Google Scholar] [CrossRef]
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Autonomous object manipulation using a soft planar grasping manipulator. Soft Robot. 2015, 2, 155–164. [Google Scholar] [CrossRef] [PubMed]
- Al Abeach, L.A.; Nefti-Meziani, S.; Davis, S. Design of a variable stiffness soft dexterous gripper. Soft Robot. 2017, 4, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Sun, Y.; Ren, H. A Flexible Fabrication Approach Toward the Shape Engineering of Microscale Soft Pneumatic Actuators. IEEE Robot. Autom. Lett. 2017, 2, 165–170. [Google Scholar] [CrossRef]
- Huan, A.S.; Xu, W.; Ren, H. Investigation of a stiffness varying mechanism for flexible robotic system. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 828–833. [Google Scholar]
- Nakamoto, H.; Ohtake, M.; Komoda, K.; Sugahara, A.; Ogawa, A. A Gripper System for Robustly Picking Various Objects Placed Densely by Suction and Pinching. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6093–6098. [Google Scholar]
- Zhakypov, Z.; Heremans, F.; Billard, A.; Paik, J. An Origami-Inspired Reconfigurable Suction Gripper for Picking Objects with Variable Shape and Size. IEEE Robot. Autom. Lett. 2018, 3, 2894–2901. [Google Scholar] [CrossRef]
- Walker, I.D. Continuum robot arms inspired by cephalopods” in et al. Int. Soc. Opt. Photonics 2005, 5804, 303–315. [Google Scholar]
- Kumar, B. Vacuum gripper—an important material handling tool. Int. J. Sci. Technol. 2017, 7, 1–8. [Google Scholar]
- Yamaguchi, K.; Hirata, Y.; Kosuge, K. Development of robot hand with suction mechanism for robust and dexterous grasping. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 5500–5505. [Google Scholar]
- Bamotra, A.; Walia, P.; Prituja, A.V.; Ren, H. Fabrication and Characterization of Novel Soft Compliant Robotic End-Effectors with Negative Pressure and Mechanical Advantages. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 369–374. [Google Scholar]
- You, F.; Mende, M.; Štogl, D.; Hein, B.; Kröger, T. Model-Free Grasp Planning for Configurable Vacuum Grippers. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4554–4561. [Google Scholar]
- RightPick 2 Gripper. RightHand Robotics Inc. 2019. Available online: https://www.righthandrobotics.com/ (accessed on 25 July 2019).
- Zeng, A.; Song, S.; Yu, T.K.; Donlon, E.; Hogan, R.F.; Bauza, M.; Fazeli, N. Robotic pick-and-place of novel objects in clutter with multi-affordance grasping and cross-domain image matching. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 1–8. [Google Scholar]
- Yu, T.K.; Fazeli, N.; Chavan-Dafle, N.; Taylor, O.; Donlon, E.; Lankenau, D.G.; Rodriguez, A. A summary of team mit’s approach to the amazon picking challenge 2015. arXiv preprint arXiv:1604.03639, 2016.
- Takahashi, T.; Suzuki, M.; Aoyagi, S. Octopus bioinspired vacuum gripper with micro bumps. In Proceedings of the 2016 IEEE 11th Annual International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Sendai, Japan, 17–20 April 2016; pp. 508–511. [Google Scholar]
- Li, C.; Gu, X.; Xiao, X.; Zhu, G.; Prituja, A.V.; Ren, H. Transcend Anthropomorphic Robotic Grasping with Modular Antagonistic Mechanisms and Adhesive Soft Modulations. IEEE Robot. Autom. Lett. 2019, 4, 2463–2470. [Google Scholar] [CrossRef]
- Ponraj, G.; Prituja, A.V.; Bamotra, A.; Guoniu, Z.; Kirthika, S.K.; Thakor, N.V.; Soares, A.B.; Ren, H. Active Contact Enhancements with Stretchable Soft Layers and Piezoresistive Tactile Array for Robotic Grippers. In Proceedings of the International Conference on Automation Science and Engineering (CASE), Vancouver, BC, Canada, 22–26 August 2019. [Google Scholar]
- Feix, T.; Romero, J.; Schmiedmayer, H.; Dollar, A.M.; Kragic, D. The GRASP Taxonomy of Human Grasp Types. IEEE Trans. Hum. -Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- Keller, A.D.; Taylor, C.L.; Zahm, V. Studies to Determine the Functional Requirements for Hand and Arm Prosthesis; Dept. Eng. Los Angeles, Univ. California: Los Angeles, CA, USA, 1947. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No | Name | Type | Suction Mechanism | Objects * | Grasp Strategy * |
|---|---|---|---|---|---|
| 1 | Origami inspired reconfigurable suction gripper [14] | Soft | Soft suction gripper. | Rigid and soft objects: various geometry and sizes. | Reconfigure gripper to match object geometry and engage suction. |
| 2 | Robot Hand with Suction Mechanism (iGRIPP 4) [17] | Rigid | Suction cups fixed at fingertips. | Rigid objects: planar, large to small cuboids. | Position suction cups on planar surfaces of the objects and engage. |
| 3 | RightPick 2 Gripper [20] | Rigid | Separate extendable finger at the centre with suction cup. | Rigid and soft objects: cylindrical, cuboid and tubular objects. | Extend middle lever for the suction cup to make contact with the object and engage suction. |
| 4 | Custom designed gripper for Amazon picking challenge [22] | Rigid | Suction cup attached to the dorsal side of one of the fingers. | Rigid and planar surface objects. | Position suction cups on planar surfaces of the object and engage. |
| 5 | Modular anthropomorphic robotic gripper [24] | Hybrid | Deformable soft structures enclose the rigid finger. | Rigid and soft objects: various shapes and sizes. | Performs power grasp and engages suction simultaneously for better grasping. |
| 6 | [This work] | Hybrid | Deformable soft structures (with suction module) enclose the rigid finger. | Rigid and soft objects: small, thin, planar, curved or irregular surface. | (1) Soft suction module deforms to surface curvature of the object on contact and engages suction; (2) Pinch grasp with dynamic grasp strength changes. Soft layers transmit the change to the object smoothly. |
| Ability | Experiment | Success Rate (%) | Comments |
|---|---|---|---|
| Pinch Grasp | Coin | 76.47 | Objects to maintain same orientation with respect to the gripper initially |
| Toothpick | 82.35 | ||
| Cosmetic cream | 88.24 | Target torque increased for thumb in between | |
| Lime fruit | 83.33 | ||
| Suction | Balloon | 70.59 | Single finger suction engaged |
| Card | 94.11 | Hand translational movement alone | |
| Page flipping | 88.24 | Hand twist and translation movements with no individual finger movement |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ponraj Joseph Vedhagiri, G.; Prituja, A.V.; Li, C.; Zhu, G.; Thakor, N.V.; Ren, H. Pinch Grasp and Suction for Delicate Object Manipulations Using Modular Anthropomorphic Robotic Gripper with Soft Layer Enhancements. Robotics 2019, 8, 67. https://doi.org/10.3390/robotics8030067
Ponraj Joseph Vedhagiri G, Prituja AV, Li C, Zhu G, Thakor NV, Ren H. Pinch Grasp and Suction for Delicate Object Manipulations Using Modular Anthropomorphic Robotic Gripper with Soft Layer Enhancements. Robotics. 2019; 8(3):67. https://doi.org/10.3390/robotics8030067
Chicago/Turabian StylePonraj Joseph Vedhagiri, Godwin, Avataram Venkatavaradan Prituja, Changsheng Li, Guoniu Zhu, Nitish V. Thakor, and Hongliang Ren. 2019. "Pinch Grasp and Suction for Delicate Object Manipulations Using Modular Anthropomorphic Robotic Gripper with Soft Layer Enhancements" Robotics 8, no. 3: 67. https://doi.org/10.3390/robotics8030067
APA StylePonraj Joseph Vedhagiri, G., Prituja, A. V., Li, C., Zhu, G., Thakor, N. V., & Ren, H. (2019). Pinch Grasp and Suction for Delicate Object Manipulations Using Modular Anthropomorphic Robotic Gripper with Soft Layer Enhancements. Robotics, 8(3), 67. https://doi.org/10.3390/robotics8030067