Heterogeneous Map Merging: State of the Art


Abstract
:1. Introduction
- The map fusion. If the correspondences between the maps are at least approximately known, the map fusion methods are used to merge the data from both maps [2,3,4,5,6,7,8,9]. The correspondences between the robot maps can be acquired in several different ways: they may be known from the start [2], acquired from mutual observations [3], or calculated by map matching [10,11,12,13,14,15,16,17,18,19,20,21,22].
2. Homogeneous Map Merging
2.1. The Map Fusion Methods
2.1.1. Metric Grid Map Fusion Methods
2.1.2. Feature Map Fusion Methods
2.1.3. Graph-Based Map Fusion Methods
2.1.4. Three-Dimensional (3D) Map Fusion Methods
- The map data is fused based on the acquired more accurate transformation. The implementation of this step depends of the used map representation.
- The new data is from an area not on the map. In this case a new leaf is added to an octree.
- The new data is in a mapped area of the same level. In this case the value of the leaf node is updated. The node’s probability is changed with the log-odds probability update.
- The new data is in a mapped area of higher resolution. In this case lower level leaf nodes are added to the node in the mapped area and updated.
- The new data is in a mapped area of lower resolution. In this case lower level leaf nodes are added to the new data node, updated and then integrated onto the map.
2.2. Map Matching Methods
2.2.1. Metric Grid Map Matching Methods
2.2.2. Feature Map Matching Methods
2.2.3. Graph-Based Map Matching Methods
2.2.4. Three-Dimensional (3D) Map Matching Methods
2.3. A summary of the Homogeneous Map Merging Methods
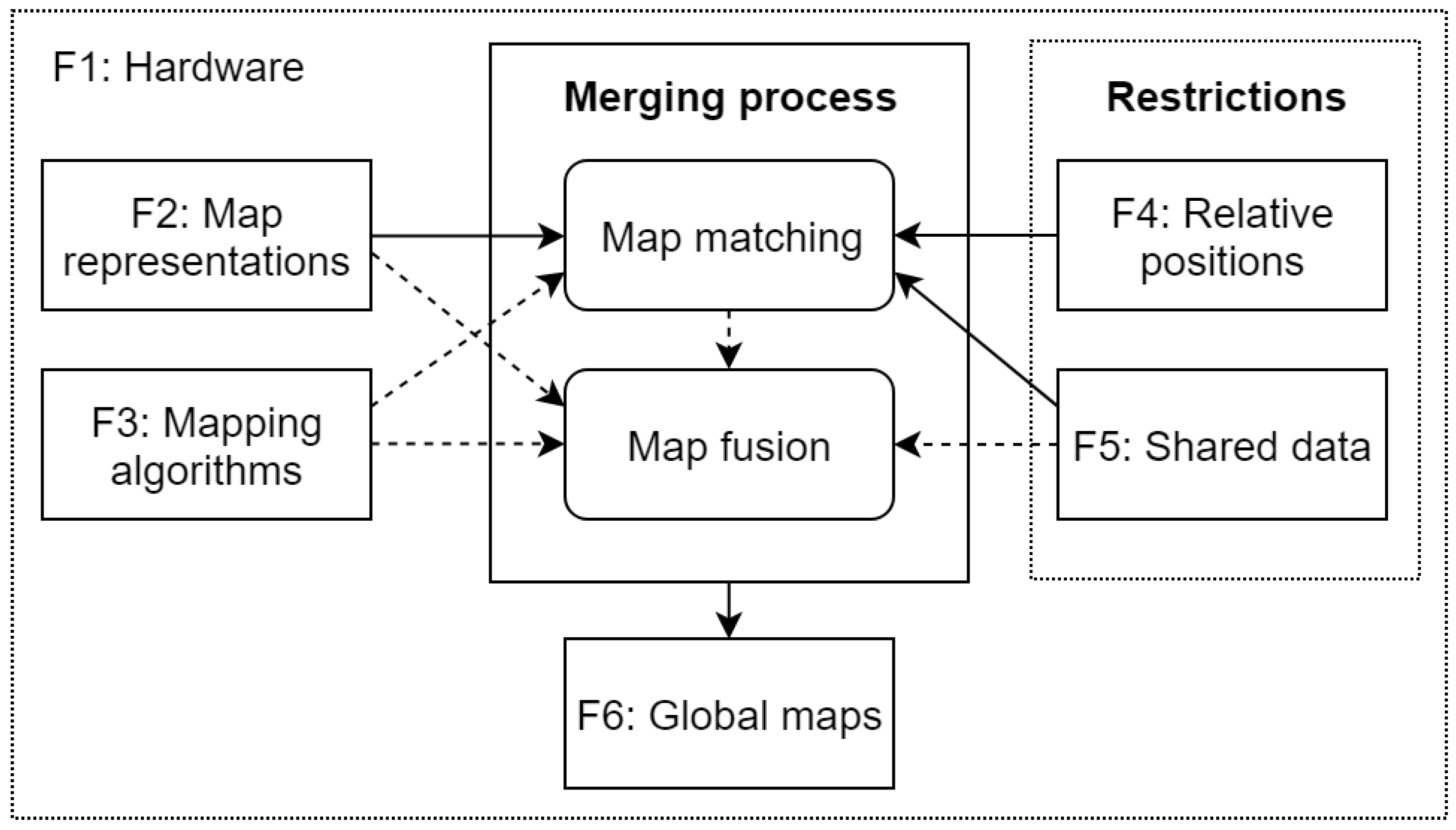
3. Map Merging Influence Factors
- Robot hardware. Does the robot hardware support map merging? Is it possible to exchange the data, is the processing capability adequate, do sensors support the acquisition of the necessary data (e.g., relative positions of the robots)? These considerations must be taken into account at least indirectly through other factors (through the map representation, relative positioning information, shared data).
- Map representation. How are the maps represented and can they be matched? Can they be merged?
- Mapping algorithms. How will the map data from the other robot be integrated in the robot’s map?
- Shared data. Are there any restrictions for shared data between the two robots (map data, full sensor data)?
- Relative positions. Is the information about the relative positions available? If yes, when and how can it be acquired, how reliable is it?
- Global maps. If the two maps can be matched, then how will the global map be handled? Will it be merged in one global map, will each robot incorporate the other robot’s map data in its own map, will a hybrid map containing both maps be created?
3.1. Map Representation
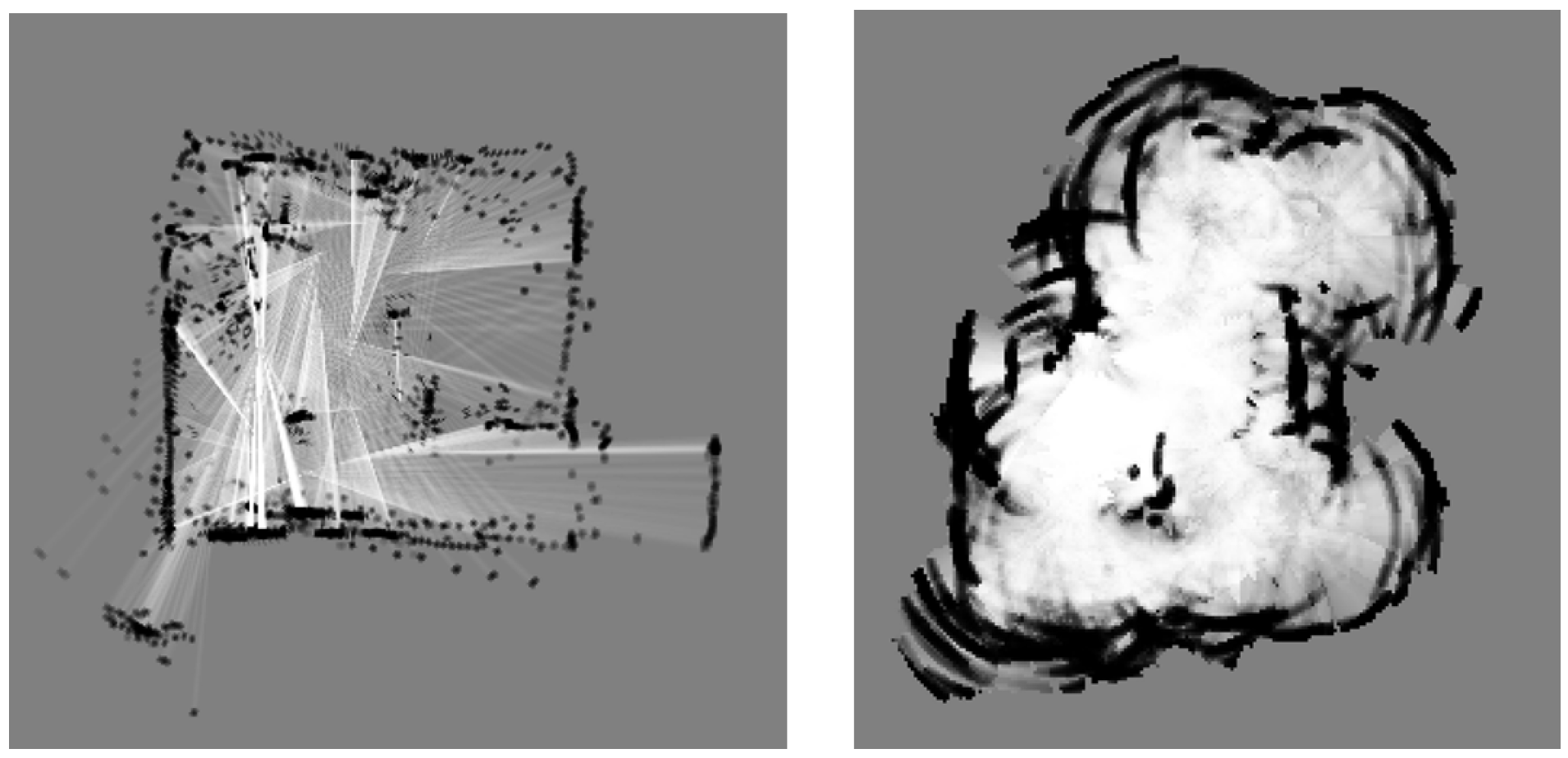
- Metric maps (see Figure 3a) [2,3,6,10,13,14,15,16,17,18,19,20,52,53,54]. These maps describe the geometric properties of the environment. Occupancy grids are the most common metric grid map type, and they represent the map as arrays, where each cell’s value shows the probability that the corresponding area in the environment is free or occupied with obstacle [63].
- Feature maps (see Figure 3b) [4,7,8,9,55,56]. In these maps information about the environment is represented as a feature list, where each feature is described with a location and parameters, if they are required for the particular feature type. Features can be points (for example, trees or furniture legs), lines (for example, walls or furniture sides) or other objects. When compared with metric maps, feature maps generally require less computational resources and memory, but they often represent the environment incompletely and do not represent the free space of the environment.
- Graph-based maps (see Figure 3c) [5,6,11,12,42]. These maps represent the environment as a graph, where the nodes represent the environment locations and the edges are paths or constraints between these locations. For topological maps, the link connecting two locations shows that the robot can move between these two places without traversing any other significant locations. Topological maps lack the geometrical information density of metric maps, but require relatively low memory and significantly simplify the path planning task [64]. Pose graph and hybrid-topological maps are also included in this category.
- Three-dimensional (3D) maps [36,37,38,39,40,41,42,43]. A common 3D map type is a point cloud map. 3D data can also be represented as discretized volumetric pixel (voxel) grids. However, voxel grids are memory inefficient, and in practice abstractions (Multi-Level Surface maps [65], 2.5-dimensional elevation maps [66]) or octree map compression [38,39,67]) are used.
3.2. Robot Hardware Configuration
- Sensor configurations. Sensor configuration determines the environment characteristics the robots are able to detect. Internal and external sensor combination directly influence the types of maps robot is capable of creating, mapping algorithms that can be applied and the accuracy of created maps. Homogeneous map merging approaches generally assume that map differences due to different quality sensors are insignificant—both maps are assumed to have the same quality and have the same weight in merging, but this is not the case for heterogeneous map merging, where different sensors are often the source of map differences. Sensor configuration also impacts whether the robots are able to estimate the position of another robot during an encounter and how accurate this estimate is.
- Communication hardware. It is assumed that all robots involved in mapping are capable of data transfer and reception, otherwise, the map data exchange is fundamentally impossible. Communication channel bandwidth influences the data amount that can be transferred and may limit both homogeneous and heterogeneous map merging possibility [1]. Some existing solutions to the bandwidth limitations are periodic data transfer [54], choosing memory-efficient map representations (for example, octree based representation of 3D maps [38,39,45]) and map compression [40,54].
- Processing capabilities. Processing requirements for different sensor configurations and mapping algorithms significantly differ. Map merging itself can also be computationally expensive and if it is impossible to delegate this task to a more capable team member, a robot with low processing capabilities may be unable to benefit from an improved map. Sharing of processing capabilities has been studied by many researchers, with one approach having robots delegate tasks to more capable team members [68] or cloud [36] and the other creating computing clusters [78] to solve complex tasks. In the recent years solutions have appeared that use the efficient parallel processing capabilities of GPU for multi-robot related tasks, for example, submap matching [36,54]
- Available memory. Memory determines the map size and resolution limitations and also the stored and received data amount. Memory limitations are especially important when considering 3D maps, and 3D octree representation is mainly motivated by memory, bandwidth and processing capability limitations of the robots [38,39,45]. In some cases the available memory allows us to store more data than the robots can process or transfer, and it is possible to acquire higher quality maps after the end of mapping [79].
3.3. Shared Information
3.4. Relative Position Information
- Known positions. The relative positions of robots are initially known or found out during mapping. The mapping can be done by the robots cooperatively updating the global map [4] or each robot can operate as an independent entity and periodically merge their maps [2,3,6,7,8,9]. A widely research problem with approximately known positions is the refinement of the transformation [2,3,6,7,8,9,37,38,39,41].
- Unknown positions (relative positions completely unknown, existence of common map part unknown) [10,13,14,15,16,17,18,19,20,21,22,40,52,53,54,55,56,57]. The solution space, where transformation of two maps must be found, is generally huge and hard to find without some feature identification in maps. The problem is that overlap between maps is unknown and may not exist. This case is especially hard for heterogeneous maps due to the possible lack of common and easily identifiable features.
3.5. Mapping Algorithms
- Particle filter based SLAM. Particle filter based SLAM [2,9,17,55] represents robot map with a set of particles, where each particle contains a hypothesis about robot position and a separate map. In the map merging regarding particle filters, a decision must be made how to handle the particle merging. Ballesta et al. [55] merges only the most probable particles, Ozkucur et al. [9] merges the estimated weighted average map of one robot with all the particles of the other robot, and Adluru et al [17] creates a virtual robot, which treats the data from all involved robots as sensor data.
- Graph based SLAM. Graph based SLAM methods [6,36,41,42] represent the map as pose graphs connected with deformable constraints and associated with a submap. The deformable graph like representation allows for nonlinear transformation between two maps even for grid maps, which normally use linear transformations [6], but they are most widely used in 3D point cloud merging [36,41,42].
3.6. Resulting Global Maps
- Hybrid map incorporates the matching result of both maps not by fusing the data, but by putting another layer atop the existing map (e.g., creating a grid-appearance map [83]).
4. Heterogeneous Map Merging Overview
4.1. Metric Map Merging
4.2. Metric Grid vs. Feature Map Merging
4.3. Metric Grid vs. Topological Map Merging
4.4. Other Maps
5. Discussion and Challenges
- Exchange of meta information. This step is necessary to determine whether the map merging is possible and which algorithm should be used. It must be noted that merging of different type and format maps may not necessarily work in both directions. For example, it can be possible to incorporate information from the feature map in the occupancy grid, but not the other way around. Meta information should include all important factors required to perform successful heterogeneous map merging or reject the merging attempt due to incompatibilities or non-existant algorithms.
- (a)
- Map type and any significant specific information that can be objectively described. Such information is, for example, the scale for occupancy grids, feature types for feature maps, stored topological information, etc. Additional information about extracted features, object data, semantic data should also be included.
- (b)
- Data that each robot is capable (and willing) to share and receive. The data can be just the map, or also include trajectory and raw sensor data. Hardware and communication channel limitations must be taken into account when determining shared information.
- (c)
- Relative position information. Map merging difficulty both for homogeneous and heterogeneous cases differs significantly based on the knowledge about the relative positioning of the robots.
- Merging of maps. This is the main challenge, where specific heterogeneous map merging algorithms must be developed. Unfortunately, there is no universal solution as evidenced by the review of existing homogeneous and heterogeneous map merging methods, therefore case-specific algorithms must be developed. The merging is asymmetric, as each robot seeks to incorporate the data from another robot in its map.
- Representation of all map types, most notably any type of 3D maps (noted in [108] as possible future development).
- Semantic information (noted in [108] as possible future development).
- Data other than map (trajectory, raw sensor data). This is a minor issue, as based on the most recent methods, very few map merging methods require this type of data.
6. Conclusions
- Heterogeneous map merging algorithms for specific cases. So far only some algorithms to merge different scale occupancy grid maps or heterogenous maps with specific restrictions exist, and even these solutions do not address asymmetric merging, where a separate global map is produced for each involved robotic platform.
- The incorrect merging chances are higher with heterogeneous maps, therefore it is necessary to research mechanisms to reduce the risk of map corruptions due to mistakes. Some possible solutions include multi-level map storage solutions or meeting strategies to confirm merging decisions.
- The merging of different quality maps is currently severely lacking even for same-type maps. To facilitate the propagation of the higher quality maps, map quality assessment algorithms are necessary.
Funding
Conflicts of Interest
References
- Saeedi, S.; Trentini, M.; Seto, M.; Li, H. Multiple-Robot Simultaneous Localization and Mapping: A Review. J. Field Robot. 2016, 33, 3–46. [Google Scholar] [CrossRef]
- Thrun, S. A probabilistic on-line mapping algorithm for teams of mobile robots. Int. J. Robot. Res. 2001, 20, 335–363. [Google Scholar] [CrossRef]
- Howard, A. Multi-robot simultaneous localization and mapping using particle filters. Int. J. Robot. Res. 2006, 25, 1243–1256. [Google Scholar] [CrossRef]
- Fenwick, J.W.; Newman, P.M.; Leonard, J.J. Cooperative concurrent mapping and localization. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292), Washington, DC, USA, 11–15 May 2002; pp. 1810–1817. [Google Scholar]
- Dudek, G.; Jenkin, M.; Milios, E.; Wilkes, D. Topological exploration with multiple robots. In Proceedings of the 7th International Symposium on Robotics with Application (ISORA), Anchorage, AK, USA, 10–14 May 1998; Volume 3. [Google Scholar]
- Bonanni, T.M.; Grisetti, G.; Iocchi, L. Merging partially consistent maps. In International Conference on Simulation, Modeling, and Programming for Autonomous Robots; Springer: Cham, Switzerland, 2014; pp. 352–363. [Google Scholar]
- Rodriguez-Losada, D.; Matia, F.; Jimenez, A. Local maps fusion for real time multirobot indoor simultaneous localization and mapping. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1308–1313. [Google Scholar]
- Zhou, X.S.; Roumeliotis, S.I. Multi-robot SLAM with unknown initial correspondence: The robot rendezvous case. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1785–1792. [Google Scholar]
- Ozkucur, N.E.; Akın, H.L. Cooperative multi-robot map merging using fast-SLAM. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2009; pp. 449–460. [Google Scholar]
- Birk, A.; Carpin, S. Merging occupancy grid maps from multiple robots. Proc. IEEE 2006, 94, 1384–1397. [Google Scholar] [CrossRef]
- Dedeoglu, G.; Sukhatme, G.S. Landmark-based matching algorithm for cooperative mapping by autonomous robots. Distrib. Auton. Robot. Syst. 2000, 4, 251–260. [Google Scholar]
- Huang, W.H.; Beevers, K.R. Topological map merging. Int. J. Robot. Res. 2005, 24, 601–613. [Google Scholar] [CrossRef]
- Konolige, K.; Fox, D.; Limketkai, B.; Ko, J.; Stewart, B. Map merging for distributed robot navigation. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 1, pp. 212–217. [Google Scholar]
- Ko, J.; Stewart, B.; Fox, D.; Konolige, K.; Limketkai, B. A practical, decision-theoretic approach to multi-robot mapping and exploration. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; Volume 4, pp. 3232–3238. [Google Scholar]
- Liu, Y.; Fan, X.; Zhang, H. A fast map merging algorithm in the field of multirobot SLAM. Sci. World J. 2013, 2013, 169635. [Google Scholar] [CrossRef] [PubMed]
- Ho, K.; Newman, P. Multiple map intersection detection using visual appearance. In Proceedings of the International Conference on Computational Intelligence, Robotics and Autonomous Systems, Singapore, 14–16 December 2005. [Google Scholar]
- Adluru, N.; Latecki, L.J.; Sobel, M.; Lakaemper, R. Merging maps of multiple robots. In Proceedings of the 2008 19th International Conference on Pattern Recognition, Tampa, FL, USA, 8–11 December 2008; pp. 1–4. [Google Scholar]
- Alnounou, Y.; Paulik, M.J.; Krishnan, M.; Hudas, G.; Overholt, J. Occupancy Grid Map Merging Using Feature Maps. In Proceedings of the IASTED Technology Conferences, Cambridge, MA, USA, 1–3 November 2010. [Google Scholar]
- Blanco, J.L.; González-Jiménez, J.; Fernández-Madrigal, J.A. A robust, multi-hypothesis approach to matching occupancy grid maps. Robotica 2013, 31, 687–701. [Google Scholar] [CrossRef] [Green Version]
- Carpin, S. Fast and accurate map merging for multi-robot systems. Auton. Robots 2008, 25, 305–316. [Google Scholar] [CrossRef]
- Saeedi, S.; Paull, L.; Trentini, M.; Seto, M.; Li, H. Map merging using Hough peak matching. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugalc, 7–12 October 2012; pp. 4683–4688. [Google Scholar]
- Lee, H.C.; Roh, B.S.; Lee, B.H. Multi-hypothesis map merging with sinogram-based PSO for multi-robot systems. Electron. Lett. 2016, 52, 1213–1214. [Google Scholar] [CrossRef]
- Topal, S.; Erkmen, D.; Erkmen, A.M. A novel map merging methodology for multi-robot systems. In Proceedings of the World Congress on Engineering and Computer Science 2010, San Francisco, CA, USA, 20–22 October 2010; Volume I, pp. 383–387. [Google Scholar]
- Hermann, M.; Pentek, T.; Otto, B. Design principles for industrie 4.0 scenarios. In Proceedings of the 2016 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016; pp. 3928–3937. [Google Scholar]
- Carlone, L.; Ng, M.K.; Du, J.; Bona, B.; Indri, M. Rao-Blackwellized particle filters multi robot SLAM with unknown initial correspondences and limited communication. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 243–249. [Google Scholar]
- Burgard, W.; Moors, M.; Fox, D.; Simmons, R.; Thrun, S. Collaborative multi-robot exploration. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 476–481. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, MA, USA, 2005. [Google Scholar]
- Thrun, S.; Liu, Y. Multi-robot SLAM with sparse extended information filers. In Robotics Research. The Eleventh International Symposium; Springer: Berlin/Heidelberg, Germany, 2005; pp. 254–266. [Google Scholar]
- Dayoub, F.; Cielniak, G.; Duckett, T. Long-term experiments with an adaptive spherical view representation for navigation in changing environments. Robot. Auton. Syst. 2011, 59, 285–295. [Google Scholar] [CrossRef] [Green Version]
- Konolige, K.; Bowman, J. Towards lifelong visual maps. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 1156–1163. [Google Scholar]
- Mühlfellner, P.; Bürki, M.; Bosse, M.; Derendarz, W.; Philippsen, R.; Furgale, P. Summary maps for lifelong visual localization. J. Field Robot. 2016, 33, 561–590. [Google Scholar] [CrossRef]
- Chang, H.J.; Lee, C.G.; Hu, Y.C.; Lu, Y.H. Multi-robot SLAM with topological/metric maps. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1467–1472. [Google Scholar]
- Cunningham, A.; Paluri, M.; Dellaert, F. DDF-SAM: Fully distributed SLAM using constrained factor graphs. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3025–3030. [Google Scholar]
- Cunningham, A.; Indelman, V.; Dellaert, F. DDF-SAM 2.0: Consistent distributed smoothing and mapping. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5220–5227. [Google Scholar]
- Thrun, S.; Montemerlo, M. The graph SLAM algorithm with applications to large-scale mapping of urban structures. Int. J. Robot. Res. 2014, 25, 403–429. [Google Scholar] [CrossRef]
- Mohanarajah, G.; Usenko, V.; Singh, M.; D’Andrea, R.; Waibel, M. Cloud-based collaborative 3D mapping in real-time with low-cost robots. IEEE Trans. Autom. Sci. Eng. 2015, 12, 239–244. [Google Scholar] [CrossRef]
- Michael, N.; Shen, S.; Mohta, K.; Kumar, V.; Nagatani, K.; Okada, Y.; Kiribayashi, S.; Otake, K.; Yoshida, K.; Ohno, K.; et al. Collaborative mapping of an earthquake damaged building via ground and aerial robots. J. Field Robot. 2012, 29, 832–841. [Google Scholar] [CrossRef]
- Jessup, J.; Givigi, S.N.; Beaulieu, A. Merging of octree based 3d occupancy grid maps. In Proceedings of the 2014 IEEE International Systems Conference Proceedings, Ottawa, ON, Canada, 31 March–3 April 2014; pp. 371–377. [Google Scholar]
- Jessup, J.; Givigi, S.N.; Beaulieu, A. Robust and efficient multirobot 3-d mapping merging with octree-based occupancy grids. IEEE Syst. J. 2017, 11, 1723–1732. [Google Scholar] [CrossRef]
- Yue, Y.; Senarathne, P.N.; Yang, C.; Zhang, J.; Wen, M.; Wang, D. Hierarchical Probabilistic Fusion Framework for Matching and Merging of 3-D Occupancy Maps. IEEE Sens. J. 2018, 18, 8933–8949. [Google Scholar] [CrossRef]
- Schuster, M.J.; Br, C.; Hirschmüller, H.; Suppa, M.; Beetz, M. Multi-robot 6D graph SLAM connecting decoupled local reference filters. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5093–5100. [Google Scholar]
- Bonanni, T.M.; Della Corte, B.; Grisetti, G. 3-D map merging on pose graphs. IEEE Robot. Autom. Lett. 2017, 2, 1031–1038. [Google Scholar] [CrossRef]
- He, S.; Qin, X.; Zhang, Z.; Jagers, M. Incremental 3D Line Segment Extraction from Semi-dense SLAM. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 1658–1663. [Google Scholar]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. Sens. Fusion IV Control Paradig. Data Struct. 1992, 1611, 586–607. [Google Scholar] [CrossRef]
- Hornung, A.; Wurm, K.M.; Bennewitz, M.; Stachniss, C.; Burgard, W. OctoMap: An efficient probabilistic 3D mapping framework based on octrees. Auton. Robots 2013, 34, 189–206. [Google Scholar] [CrossRef]
- Ohno, K.; Tadokoro, S.; Nagatani, K.; Koyanagi, E.; Yoshida, T. Trials of 3-D map construction using the tele-operated tracked vehicle Kenaf at Disaster City. In Proceedings of the 2010 IEEE International Conference on robotics and automation, Anchorage, AK, USA, 3–7 May 2010; pp. 2864–2870. [Google Scholar]
- Dryanovski, I.; Morris, W.; Xiao, J. Multi-volume occupancy grids: An efficient probabilistic 3D mapping model for micro aerial vehicles. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 1553–1559. [Google Scholar]
- Luo, W.; Zhang, H. Visual analysis of large-scale lidar point clouds. In Proceedings of the 2015 IEEE International Conference on Big Data (Big Data), Santa Clara, CA, USA, 29 October–1 November 2015; pp. 2487–2492. [Google Scholar]
- Wolff, K.; Kim, C.; Zimmer, H.; Schroers, C.; Botsch, M.; Sorkine-Hornung, O.; Sorkine-Hornung, A. Point cloud noise and outlier removal for image-based 3D reconstruction. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 118–127. [Google Scholar]
- Chen, S.; Tian, D.; Feng, C.; Vetro, A.; Kovačević, J. Fast resampling of three-dimensional point clouds via graphs. IEEE Trans. Signal Process. 2017, 66, 666–681. [Google Scholar] [CrossRef]
- Tombari, F.; Salti, S.; Di Stefano, L. A combined texture-shape descriptor for enhanced 3D feature matching. In Proceedings of the 2011 18th IEEE International Conference on Image Processing, Brussels, Belgium, 11–14 September 2011; pp. 809–812. [Google Scholar]
- Ma, X.; Guo, R.; Li, Y.; Chen, W. Adaptive genetic algorithm for occupancy grid maps merging. In Proceedings of the 2008 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 5716–5720. [Google Scholar]
- Li, H.; Nashashibi, F. A new method for occupancy grid maps merging: Application to multi-vehicle cooperative local mapping and moving object detection in outdoor environment. In Proceedings of the 2012 12th International Conference on Control Automation Robotics and Vision, Guangzhou, China, 5–7 December 2012; pp. 632–637. [Google Scholar]
- Reid, R.; Bräunl, T. Large-scale Multi-robot Mapping in MAGIC 2010. In Proceedings of the 2011 IEEE 5th International Conference on Robotics, Automation and Mechatronics (RAM), Qingdao, China, 17–19 September 2011; pp. 239–244. [Google Scholar]
- Ballesta, M.; Gil, A.; Reinoso, O.; Juliá, M.; Jiménez, L.M. Alignment of visual maps in multirobot fastslam. In Proceedings of the 8th WSEAS International Conference on Computational Intelligence, Man-machine Systems and Cybernetics (CIMMACS), Puerto De La Cruz, Spain, 14–16 December 2009; pp. 92–97. [Google Scholar]
- Lakaemper, R.; Latecki, L.J.; Wolter, D. Incremental multi-robot mapping. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3846–3851. [Google Scholar]
- Dinnissen, P.; Givigi, S.N.; Schwartz, H.M. Map merging of multi-robot slam using reinforcement learning. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012; pp. 53–60. [Google Scholar]
- Serafin, J.; Grisetti, G. NICP: Dense normal based point cloud registration. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 742–749. [Google Scholar]
- Dubé, R.; Gawel, A.; Sommer, H.; Nieto, J.; Siegwart, R.; Cadena, C. An online multi-robot slam system for 3d lidars. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1004–1011. [Google Scholar]
- Dubé, R.; Dugas, D.; Stumm, E.; Nieto, J.; Siegwart, R.; Cadena, C. Segmatch: Segment based place recognition in 3d point clouds. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5266–5272. [Google Scholar]
- Pathak, K.; Birk, A.; Vaskevicius, N.; Pfingsthorn, M.; Schwertfeger, S.; Poppinga, J. Online three-dimensional SLAM by registration of large planar surface segments and closed-form pose-graph relaxation. J. Field Robot. 2010, 27, 52–84. [Google Scholar] [CrossRef]
- Hahnel, D.; Burgard, W.; Thrun, S. Learning compact 3D models of indoor and outdoor environments with a mobile robot. Robot. Auton. Syst. 2003, 44, 15–27. [Google Scholar] [CrossRef]
- Elfes, A. Occupancy grids: A stochastic spatial representation for active robot perception. Proc. Sixth Conf. Uncertain. AI 1990, 2929, 6. [Google Scholar]
- Pfingstorn, M.; Slamet, B.; Visser, A. A scalable hybrid multi-robot SLAM method for highly detailed maps. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germany, 2007; pp. 457–464. [Google Scholar]
- Triebel, R.; Pfaff, P.; Burgard, W. Multi-level surface maps for outdoor terrain mapping and loop closing. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 2276–2282. [Google Scholar]
- Pfaff, P.; Triebel, R.; Burgard, W. An efficient extension to elevation maps for outdoor terrain mapping and loop closing. Int. J. Robot. Res. 2007, 26, 217–230. [Google Scholar] [CrossRef]
- Wurm, K.M.; Hennes, D.; Holz, D.; Rusu, R.B.; Stachniss, C.; Konolige, K.; Burgard, W. Hierarchies of octrees for efficient 3d mapping. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4249–4255. [Google Scholar]
- Hofmeister, M.; Kronfeld, M.; Zell, A. Cooperative visual mapping in a heterogeneous team of mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1491–1496. [Google Scholar]
- Erinc, G.; Carpin, S. Anytime merging of appearance-based maps. Auton. Robots 2014, 36, 241–256. [Google Scholar] [CrossRef]
- Elibol, A.; Kim, J.; Gracias, N.; Garcia, R. Efficient image mosaicing for multi-robot visual underwater mapping. Pattern Recognit. Lett. 2014, 46, 20–26. [Google Scholar] [CrossRef]
- Howard, A. Multi-robot mapping using manifold representations. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 4198–4203. [Google Scholar]
- Nieto, J.I.; Guivant, J.E.; Nebot, E.M. The hybrid metric maps (HYMMs): A novel map representation for DenseSLAM. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 391–396. [Google Scholar]
- Wurm, K.M.; Stachniss, C.; Grisetti, G. Bridging the gap between feature-and grid-based SLAM. Robot. Auton. Syst. 2010, 58, 140–148. [Google Scholar] [CrossRef]
- Schmuck, P.; Scherer, S.A.; Zell, A. Hybrid metric-topological 3D occupancy grid maps for large-scale mapping. IFAC-PapersOnLine 2016, 49, 230–235. [Google Scholar] [CrossRef]
- Ko, B.Y.; Song, J.B.; Lee, S. Real-time building of a thinning-based topological map with metric features. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 1524–1529. [Google Scholar]
- Kostavelis, I.; Gasteratos, A. Semantic mapping for mobile robotics tasks: A survey. Robot. Auton. Syst. 2015, 66, 86–103. [Google Scholar] [CrossRef]
- Salas-Moreno, R.F.; Newcombe, R.A.; Strasdat, H.; Kelly, P.H.; Davison, A.J. Slam++: Simultaneous localisation and mapping at the level of objects. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 1352–1359. [Google Scholar]
- Marjovi, A.; Choobdar, S.; Marques, L. Robotic clusters: Multi-robot systems as computer clusters: A topological map merging demonstration. Robot. Auton. Syst. 2012, 60, 1191–1204. [Google Scholar] [CrossRef]
- Husain, A.; Jones, H.; Kannan, B.; Wong, U.; Pimentel, T.; Tang, S.; Daftry, S.; Huber, S.; Whittaker, W.L. Mapping planetary caves with an autonomous, heterogeneous robot team. In Proceedings of the 2013 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2013; pp. 1–13. [Google Scholar]
- Saeedi, S.; Paull, L.; Trentini, M.; Seto, M.; Li, H. Group mapping: A topological approach to map merging for multiple robots. IEEE Robot. Autom. Mag. 2014, 21, 60–72. [Google Scholar] [CrossRef]
- Park, J.; Sinclair, A.J.; Sherrill, R.E.; Doucette, E.A.; Curtis, J.W. Map merging of rotated, corrupted, and different scale maps using rectangular features. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 535–543. [Google Scholar]
- Ferrao, V.T.; Vinhal, C.D.N.; da Cruz, G. An Occupancy Grid Map Merging Algorithm Invariant to Scale, Rotation and Translation. In Proceedings of the 2017 Brazilian Conference on Intelligent Systems (BRACIS), Uberlandia, Brazil, 2–5 October 2017; pp. 246–251. [Google Scholar]
- Erinc, G.; Balaguer, B.; Carpin, S. Heterogeneous map merging using WiFi signals. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 5258–5264. [Google Scholar]
- Ch, P.; Carnegie, D.A. Mapping and exploration in a hierarchical heterogeneous multi-robot system using limited capability robots. Robot. Auton. Syst. 2013, 61, 565–579. [Google Scholar]
- Fankhauser, P.; Bloesch, M.; Krusi, P.; Diethelm, R.; Wermelinger, M.; Schneider, T.; Dymczyk, M.; Hutter, M.; Siegwart, R. Collaborative navigation for flying and walking robots. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 2859–2866. [Google Scholar]
- Ma, L.; Zhu, J.; Zhu, L.; Du, S.; Cui, J. Merging grid maps of different resolutions by scaling registration. Robotica 2016, 34, 2516–2531. [Google Scholar] [CrossRef]
- Shahb, S.G.; Magnusson, M. 2D map alignment with region decomposition. Auton. Robots 2019, 43, 1117–1136. [Google Scholar]
- Shahb, S.G.; Magnusson, M.; Iagnemma, K. Nonlinear Optimization of Multimodal Two-Dimensional Map Alignment With Application to Prior Knowledge Transfer. IEEE Robot. Autom. Lett. 2018, 3, 2040–2047. [Google Scholar] [Green Version]
- Boniardi, F.; Caselitz, T.; Kümmerle, R.; Burgard, W. A pose graph-based localization system for long-term navigation in CAD floor plans. Robot. Auton. Syst. 2019, 112, 84–97. [Google Scholar] [CrossRef]
- Mielle, M.; Magnusson, M.; Lilienthal, A.J. Using sketch-maps for robot navigation: Interpretation and matching. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 252–257. [Google Scholar]
- Neuhaus, M.; Bunke, H. An error-tolerant approximate matching algorithm for attributed planar graphs and its application to fingerprint classification. In Proceedings of the Joint IAPR International Workshops on Statistical Techniques in Pattern Recognition (SPR) and Structural and Syntactic Pattern Recognition (SSPR), Lisbon, Portugal, 18–20 August 2004; pp. 180–189. [Google Scholar]
- Mielle, M.; Magnusson, M.; Andreasson, H.; Lilienthal, A.J. SLAM auto-complete: Completing a robot map using an emergency map. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 35–40. [Google Scholar]
- Gawel, A.; Cieslewski, T.; Dubé, R.; Bosse, M.; Siegwart, R.; Nieto, J. Structure-based vision-laser matching. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 182–188. [Google Scholar]
- Gawel, A.; Dubé, R.; Surmann, H.; Nieto, J.; Siegwart, R.; Cadena, C. 3d registration of aerial and ground robots for disaster response: An evaluation of features, descriptors, and transformation estimation. In Proceedings of the 2017 IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, China, 11–13 October 2017; pp. 27–34. [Google Scholar]
- Caselitz, T.; Steder, B.; Ruhnke, M.; Burgard, W. Matching geometry for long-term monocular camera localization. In Proceedings of the ICRA Workshop: AI for Long-Term Autonomy, Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Lu, Y.; Lee, J.; Yeh, S.H.; Cheng, H.M.; Chen, B.; Song, D. Sharing heterogeneous spatial knowledge: Map fusion between asynchronous monocular vision and lidar or other prior inputs. In Proceedings of the 18th International Symposium on Robotics Research (ISRR), Puerto Varas, Chile, 11–14 December 2017; Volume 158. [Google Scholar]
- Andersone, I. Probabilistic Mapping with Ultrasonic Distance Sensors. Procedia Comput. Sci. 2017, 104, 362–368. [Google Scholar] [CrossRef]
- Li, Y.; Olson, E.B. A general purpose feature extractor for light detection and ranging data. Sensors 2010, 10, 10356–10375. [Google Scholar] [CrossRef]
- Fabrizi, E.; Saffiotti, A. Extracting topology-based maps from gridmaps. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2972–2978. [Google Scholar]
- Joo, K.; Lee, T.K.; Baek, S.; Oh, S.Y. Generating topological map from occupancy grid-map using virtual door detection. In Proceedings of the IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; pp. 1–6. [Google Scholar]
- Schwertfeger, S.; Birk, A. Evaluation of map quality by matching and scoring high-level, topological map structures. In Proceedings of the 2013 IEEE international conference on robotics and automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2221–2226. [Google Scholar]
- Kakuma, D.; Tsuichihara, S.; Ricardez, G.A.G.; Takamatsu, J.; Ogasawara, T. Alignment of occupancy grid and floor maps using graph matching. In Proceedings of the 2017 IEEE 11th International Conference on Semantic Computing (ICSC), San Diego, CA, USA, 30 January–1 February 2017; pp. 57–60. [Google Scholar]
- Yamamoto, T.; Nakagawa, M. Merging Airborne LIDAR Data and Satellite SAR Data for Building Classification. Int. Arch. Photogram. Remote Sens. Spat. Inf. Sci. 2015, 40, 227. [Google Scholar] [CrossRef]
- Tian, Y.; Chen, C.; Shah, M. Cross-view image matching for geo-localization in urban environments. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 3608–3616. [Google Scholar]
- Fanta-Jende, P.; Nex, F.; Vosselman, G.; Gerke, M. Co-registration of panoramic mobile mapping images and oblique aerial images. Photogram. Record 2019, 34, 148–173. [Google Scholar] [CrossRef]
- Gawel, A.; Del Don, C.; Siegwart, R.; Nieto, J.; Cadena, C. X-view: Graph-based semantic multi-view localization. IEEE Robot. Autom. Lett. 2018, 3, 1687–1694. [Google Scholar] [CrossRef]
- Castaldo, F.; Zamir, A.; Angst, R.; Palmieri, F.; Savarese, S. Semantic cross-view matching. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Santiago, Chile, 7–13 December 2015; pp. 9–17. [Google Scholar]
- Amigoni, F.; Yu, W.; Andre, T.; Holz, D.; Magnusson, M.; Matteucci, M.; Moon, H.; Yokotsuka, M.; Biggs, G.; Madhavan, R. A Standard for Map Data Representation: IEEE 1873-2015 Facilitates Interoperability between Robots. IEEE Robot. Autom. Mag. 2018, 25, 65–76. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Thrun [2] | Metric grid | PF-EM | Known init. | Shared | All | High communication requirements. |
| Howard [3] | Metric grid | RBPF | Known (meet.) | Shared | All | Must support relative position estimation. High communication requirements. |
| Adluru et al. [17] | Metric grid | RBPF | Matching | Shared | Map only | - |
| Carlone et al. [25] | Metric grid | RBPF | Known (meet.) | Separate | All | Must support relative position estimation. |
| Burgard et al. [26] | Metric grid | - | Known | Separate | Map only | - |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Fenwick [4] | Feature | EKF | Known init. | Shared | All | - |
| Rodriguez-Losada et al. [7] | Feature | EKF | Known (meet.) | Shared | Map only | Must support relative position estimation. |
| Zhou et al. [8] | Feature | EKF | Known (meet.) | Shared | Map only | Must support relative position estimation. |
| Thrun Liu. [28] | Feature | SEIF | Unknown | Separate | Map only | Tolerant of the network latencies. |
| Ozkucur et al. [9] | Feature | RBPF | Known (meet.) | Separate | Map only | Must support relative position estimation. |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Dudek et al. [5] | Topological | Marker based | Known (meet.) | Separate | Map only | Requires physical markers. Low sensor requirements. |
| Chang et al. [32] | Top./Metric | RBPF-EM | Known (meet.) | Separate | Map only | The map optimization is a high cost process. |
| Bonanni et al. [6] | Pose graphs | Graph-based | Known | Separate | Map only | - |
| Cunnigham et al. [33,34] | Pose graphs | Graph-based | Known | Separate | Map only | High computational scalability. Low communication bandwidth. |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Michael et al. [37] | 3D voxel | Scan matching | Known | Separate | Map only | Employs ground and aerial vehicles. Considers computational limitations. |
| Yue et al. [40] | 3D voxel | RBPF | Matching | Separate | Map only | Considers memory and bandwith limitations. |
| Jessup et al. [38,39] | Octree | Octree mapping | Known | Separate | Map only | Octree representation requires less memory and bandwidth than the voxel grids. |
| Schuster et al. [41] | PC PG | Graph SLAM | Known | Shared | Map only | Requires robot marker detections. |
| Mohanarajah et al. [36] | Key-frame PG | Graph SLAM | Matching | Shared | Map only | Considers the computation limitations by performing background matching in the cloud. |
| Bonanni et al. [42] | PC PG | Graph SLAM | Matching | Separate | Map only | The fusion is an offline process. |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Ko et al. [14] | Metric grid | - | Known | Separate | Map only | - |
| Konolige et al. [13] | Grid/features | - | Known | Separate | Map only | - |
| Liu et al. [15] | Metric grid | - | Known | Separate | Map only | - |
| Birk Carpin [10] | Metric grid | - | Known | Separate | Map only | Requires high computational capabilities. |
| Ma et al. [52] | Metric grid | - | Known | Separate | Map only | Requires high computational capabilities. |
| Li Nashasibi [53] | Metric grid | - | Known | Separate | Map only | Requires high computational capabilities. |
| Ho Newman [16] | Grid/images | - | Known | Separate | Map only | Sensors must support image collection. |
| Adluru et al. [17] | Metric grid | RBPF | Known | Separate | Map only | - |
| Alnounou et al. [18] | Metric grid | - | Known | Separate | Map only | - |
| Blanco et al. [19] | Metric grid | - | Known | Separate | Map only | - |
| Carpin [20] | Metric grid | - | Known | Separate | Map only | - |
| Saeedi et al. [21] | Metric grid | - | Known | Separate | Map only | - |
| Lee et al. [22] | Metric grid | - | Known | Separate | Map only | - |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Ballesta et al. [55] | Feature map | RBPF | Unknown | Separate | Map only | - |
| Lakaemper et al. [56] | Feature map | Custom | Unknown | Separate | Map only | - |
| Thrun Liu. [28] | Feature map | SEIF | Unknown | Separate | Map only | Tolerant of the network latencies. |
| Dinnissen et al. [57] | Metric/feature | RBPF | Unknown | Separate | Map only | - |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Dedeoglu, Sukhatme [11] | Topological | - | Unknown | Separate | Map only | - |
| Huang, Beevers [12] | Topological | - | Unknown | Separate | Map only | - |
| Method | Map Type | Algorithm | Relative Pos. | Global Map | Shared Data | Hardware |
|---|---|---|---|---|---|---|
| Yue et al [40] | Voxel grid | - | Unknown | Separate | Map only | Addresses bandwith limitations. |
| Bonanni et al. [42] | PC PG | Graph-based | Unknown | Separate | Map only | Requires significant processing capabilities. |
| Mohanarajah et al. [36] | Key-point PG | Graph-based | Unknown | Separate | Map only | Addresses bandwith limitations. Utilizes cloud computing. |
| Dube et al. [59] | PC PG | Custom | Matching | Shared | Map only | Designed to work online with LIDAR sensors. |
| Method Type | Commentary |
|---|---|
| Metric grid map fusion | The methods deal mainly with the data fusion and map optimization [2,3,17,25,26,27]. |
| Metric grid map matching | The researchers most often address the problem of the map matching and assume that the data from the other map will be treated as if it was just another measurement [10,16,17,18,19,20,21,22,52,53]. The matching is usually performed in one of four ways: (1) using localization techniques [13,14,15]; (2) as a heuristic search in the transformation space [10,52,53]; (3) through feature extraction and matching [16,17,18,19]; or (4) using the map transformations to other representations, e.g., Hough spectrum [20,21]. |
| Feature map fusion | Most methods deal with the fusion of the features in the context of specific mapping algorithm (EKF mapping [4,7,8], Particle filter based mapping [9], SEIF [28]). Special attention is paid to the discovery of duplicate features and avoiding the map divergence. |
| Feature map matching | Most methods in this category address both the feature map matching and the map fusion problem [28,55,56]. The features are most often matched by using some RANSAC, SVD (singular value decomposition) or iterative closest point (ICP) search algorithm version [55]. |
| Graph-based map fusion | One group of methods deal with the the fusion of graph nodes while avoiding duplicates (topological and topological-metric maps) [5,32]. Pose graph fusion addresses the addition strategies of new constraints between the maps [6,33,34] |
| Graph-based map matching | The methods use graph matching methods to find the correspondence between the graphs [11,12]. The main difference from feature matching is the observation of the connectivity constraints between the maps. |
| 3D map fusion | Most methods use some version of 3D iterative closest point (ICP) algorithm to refine the transformation [37,38,39,41]. Volumetric maps are transformed to point clouds to make ICP algorithms applicable [37]. |
| 3D map matching | The methods in this group generally search for the transformation, which is then usually refined in a similar way to the map fusion [37,38,39,41]. The computational complexity is reduced by either using structural features [40,59] matching submaps [42], or both [36,41]. |
| Factor | Values | Commentary |
|---|---|---|
| Map representation | Metric grid maps Feature maps Graph-based maps 3D maps Other maps | There is no single best map representation as each has benefits and shortcomings. Additionally to the general map type, other differences may be present: scale, quality or sparsity. |
| Positions | Known Unknown | Methods that work with unknown relative positions are generally more universal. If the merging method works for unknown positions, it can also be used for known positions if an appropriate data fusion method is proposed. |
| Global map | Shared Separate Hybrid | Global map handling determines whether the output is the the same global map for both robots that (shared), different global map for each robot (separate) or the same map for both robots that differs from original map representations (hybrid) |
| Hardware | LIDAR Camera Other | Only the sensors will be considered in this group (if relevant), as they are one of the most important sources of heterogeneity in the heterogeneous map merging. |
| Mapping algorithm | EKF SLAM Particle filter based SLAM Graph-based SLAM Other | The mapping algorithms will be considered when they are an important part of the heterogeneity |
| Map Type | Mapping Alg. | Relative Pos. | Global Map | Hardware | Methods | Comments |
|---|---|---|---|---|---|---|
| Grid (scale) | - | Unknown | Separate | - | [23,81,82,86] | All methods deal with different scale occupancy grid merging |
| Grid (scale, qual.) | - | Unknown | Separate | - | [87,88] | Methods can merge different scale and quality maps, if the environment has distinct regions. [87] finds nonlinear transformation. |
| NDT/prior | - | Unknown | Separate | - | [92] | Method fuses Normal Distribution Transform (NDT) map with prior emergency maps by using graph-based SLAM and corner feature matching. Only robot uses the resulting map. |
| Pose graph/CAD | Graph-based | Known | Separate | - | [89] | Method uses the CAD map prior to correct the pose graph map constructed by the robot. |
| Dense/sparse 3D PC | - | Known | - | LIDAR/Mono-cam. | [95] | The dense LIDAR 3D point cloud map is used for the localization with a monocular camera that produces sparse point set. |
| Dense/sparse 3D PC | - | Unknown | - | LIDAR/Mono-cam. | [93,94] | These methods improve the work by [95] by addressing the dense and sparse point cloud matching with unknown initial correspondences. |
| 3D PC/prior | - | Known | Separate | LIDAR/Mono-cam. | [96] | The LIDAR constructed prior map is used as a reference map for low quality vision based mapping improvement. |
| 3D PC/Grid | - | Known | Hybrid | Different LIDAR | [79] | The method merges 2D occupancy grid with 3D point cloud in postprocessing. |
| Map Type | Mapping Alg. | Relative Pos. | Global Map | Hardware | Methods | Comments |
|---|---|---|---|---|---|---|
| Grid vs feature | - | Unknown | - | - | [17,18,98] | Methods deal with feature extraction from occupancy grids, but not feature and grid map merging. Cited methods are examples dealing with feature extraction; not an exhaustive list. |
| Map Type | Mapping Alg. | Relative Pos. | Global Map | Hardware | Methods | Comments |
|---|---|---|---|---|---|---|
| Grid vs topological | - | Unknown | - | - | [99,100,101,102] | Methods deal with extraction of topological structures from occupancy grids, but not topological and grid map merging. Cited methods are not an exhaustive list of topological structure extraction methods. |
| Map Type | Mapping Alg. | Relative Pos. | Global Map | Hardware | Methods | Comments |
|---|---|---|---|---|---|---|
| Aerial/Ground | - | Various | Hybrid | Aerial/Ground | [103,104,105,106,107] | Currently limited use in multi-robot systems for real time mapping. |
| Grid/Image map | Cooperative | Known | LIDAR/Camera | Separate | [68] | Requires cooperative mapping, image maps can’t be independently built. |
| Grid/Appearance | - | Unknown | - | Hybrid | [83] | Requires creation of wireless signal strength maps for all robots. Only considers finding correspondences, but not integration of map data. |
| Methods | Heterogeneity | Comments |
|---|---|---|
| [23,81,82,86,87] | Different scale occupancy grids | All methods focus on the map matching with unknown positions and are able to produce separate maps. [87] also considers different quality maps. |
| [87] | Different scale and quality occupancy grids | The approach focuses on the map matching with unknown positions and is able to produce separate maps. |
| [89,92,96] | Robot map versus a prior map. | The methods deal with matching the prior with a robot map. The result is intended to improve the robot map. |
| [93,94,95,96] | Different sensors | The methods address the maps constructed with different sensors. [95,96] assume known positions and perform localization [95] or map improvement [96]; [93,94] work on finding the transformation between the maps. |
| [79] | 2D and 3D maps | The method fuses 2D and 3D map in one hybrid map, when the relative positions are known and all data is collected. |
| [17,18,98] | Feature and grid maps | Methods deal with the feature extraction from occupancy grids, but not feature and grid map merging. |
| [99,100,101,102] | Topological and grid maps | Methods deal with the extraction of topological structures from occupancy grids, but not topological and grid map merging. |
| [103,104,105,106,107] | Aerial and ground view matching | Methods address the cross-view localization problem for aerial and ground views. |
| [68] | Grid and image maps | The approach addresses cooperative heterogeneous map creation for robots with various capabilities. |
| [83] | Grid and appearance maps | The approach matches the maps that have little commonalities with the help of wireless signal strength maps. In the end both maps are fused in one hybrid map. |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andersone, I. Heterogeneous Map Merging: State of the Art. Robotics 2019, 8, 74. https://doi.org/10.3390/robotics8030074
Andersone I. Heterogeneous Map Merging: State of the Art. Robotics. 2019; 8(3):74. https://doi.org/10.3390/robotics8030074
Chicago/Turabian StyleAndersone, Ilze. 2019. "Heterogeneous Map Merging: State of the Art" Robotics 8, no. 3: 74. https://doi.org/10.3390/robotics8030074
APA StyleAndersone, I. (2019). Heterogeneous Map Merging: State of the Art. Robotics, 8(3), 74. https://doi.org/10.3390/robotics8030074