People Detection and Tracking Using LIDAR Sensors

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
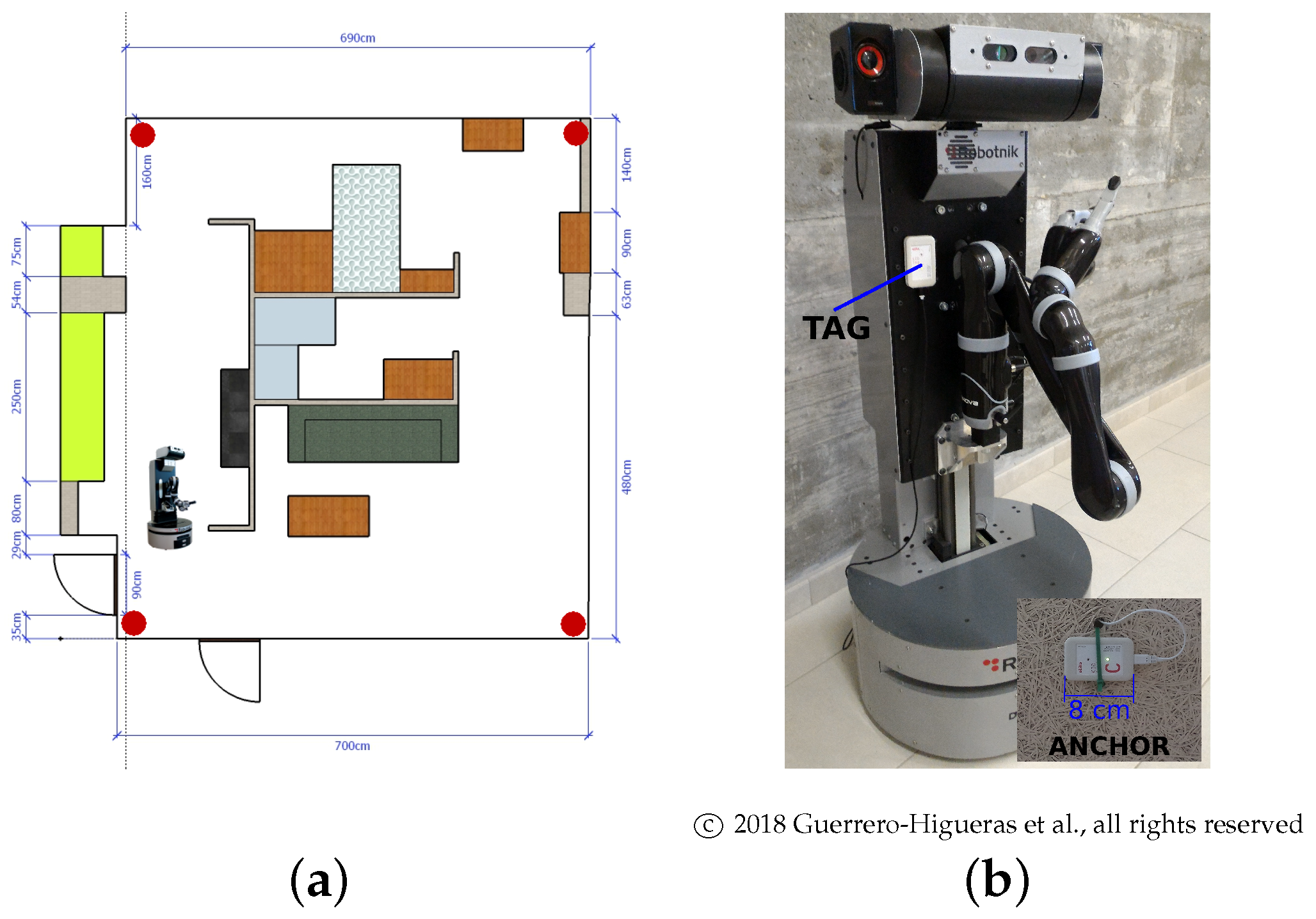
2.1. KIO RTLS
2.2. Orbi-One Robot
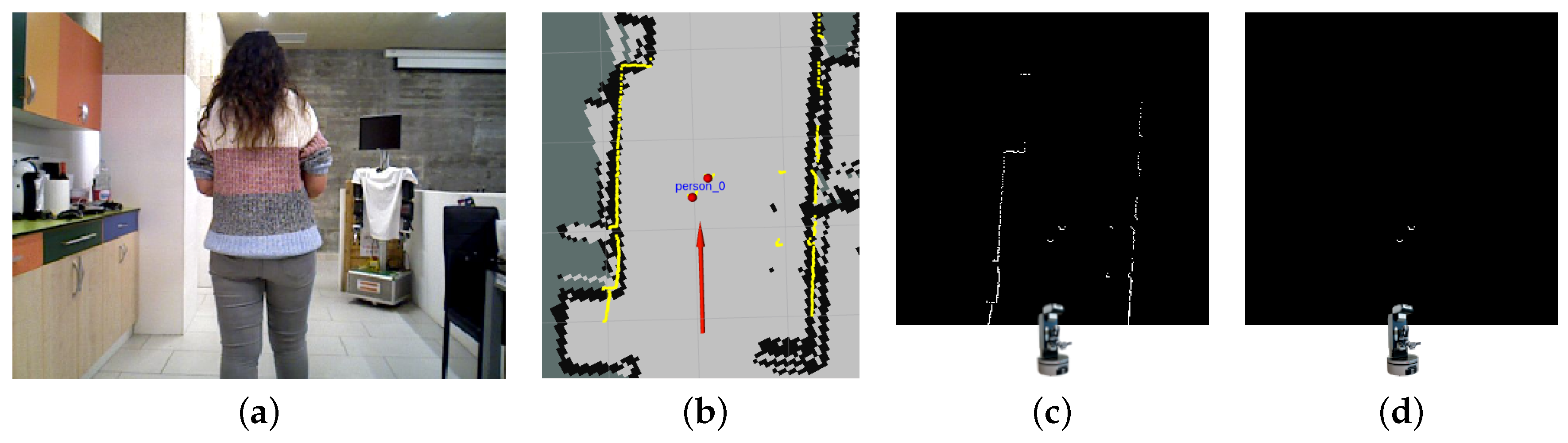
2.3. PeTra
2.3.1. PeTra operation
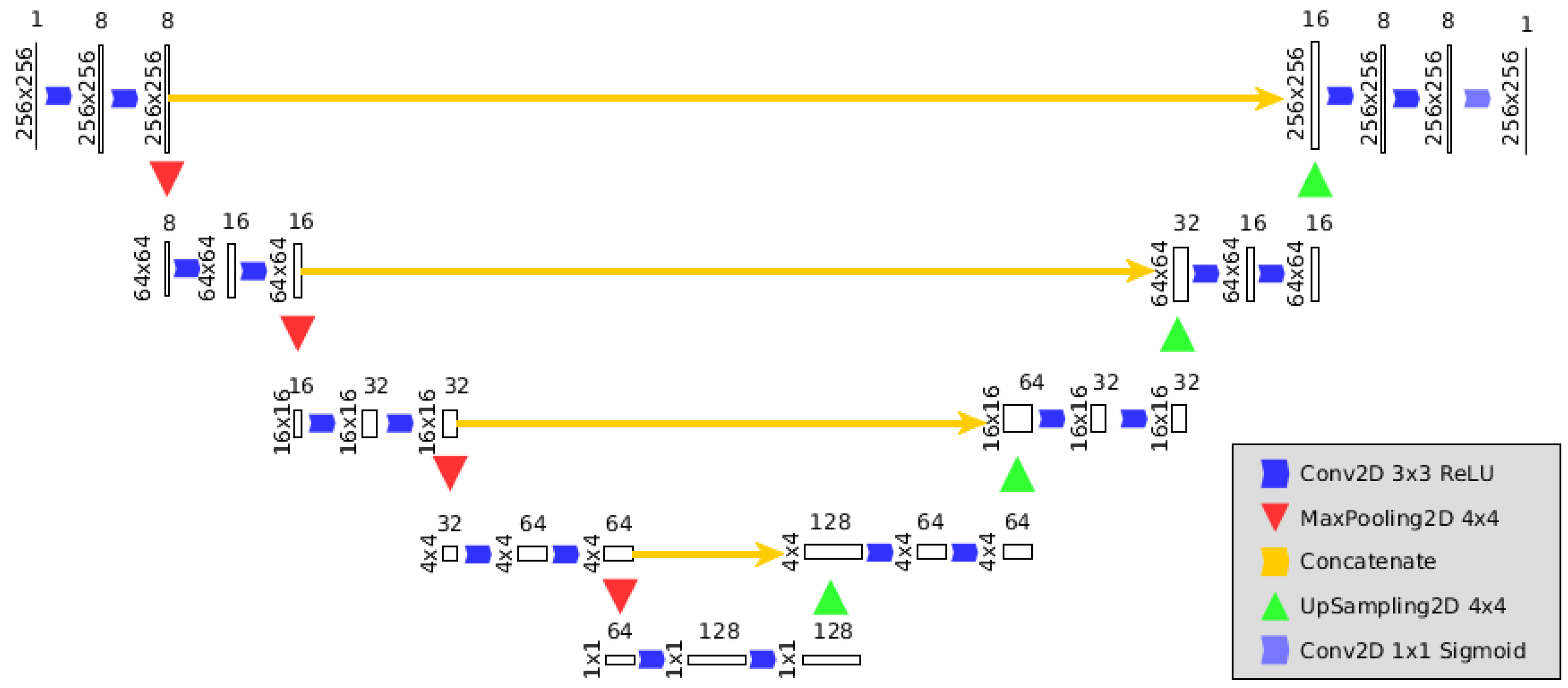
2.3.2. PeTra’s New Release
Changes on CNN’s Design
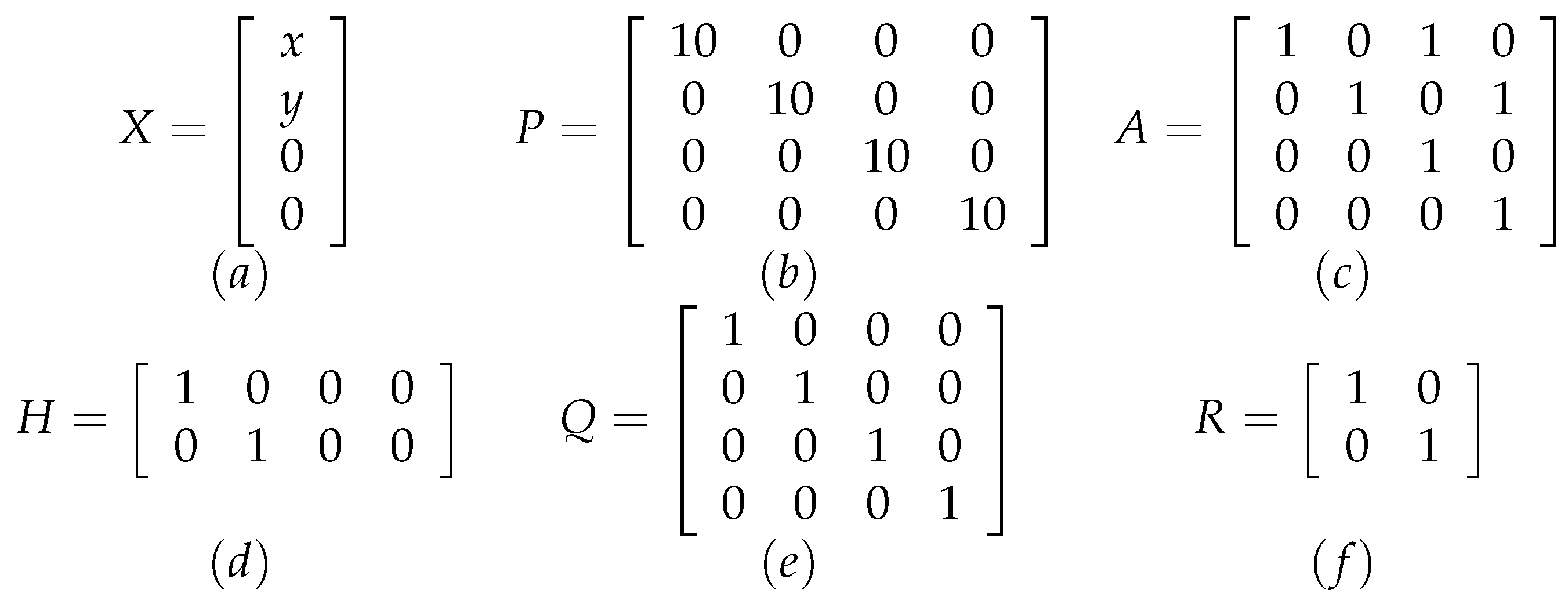
Location Estimates’ Correlation
2.4. Evaluation
Evaluation Dataset
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CNN | Convolutional Neural Network |
| ERL | European Robotics League |
| LIDAR | Laser Imaging Detection and Ranging |
| PeTra | People Tracker |
| ROS | Robot Operating System |
| RTLS | Real Time Location System |
| SLAM | Simultaneous Localization And Mapping |
References
- Holz, D.; Iocchi, L.; Van Der Zant, T. Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@ Home approach. In Proceedings of the AAAI Spring Symposium: Designing Intelligent Robots, Stanford, CA, USA, 25–27 March 2013; pp. 27–32. [Google Scholar]
- Wisspeintner, T.; Van Der Zant, T.; Iocchi, L.; Schiffer, S. RoboCup@ Home: Scientific competition and benchmarking for domestic service robots. Interact. Stud. 2009, 10, 392–426. [Google Scholar]
- Kruse, T.; Pandey, A.K.; Alami, R.; Kirsch, A. Human-aware robot navigation: A survey. Robot. Auton. Syst. 2013, 61, 1726–1743. [Google Scholar] [CrossRef] [Green Version]
- Kessler, J.; Iser, D.; Gross, H.M. I’ll keep you in sight: Finding a good position to observe a person. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 4392–4398. [Google Scholar]
- Mozos, O.M.; Kurazume, R.; Hasegawa, T. Multi-part people detection using 2d range data. Int. J. Soc. Robot. 2010, 2, 31–40. [Google Scholar] [CrossRef]
- Asghari Oskoei, M.; Walters, M.; Dautenhahn, K. An autonomous proxemic system for a mobile companion robot. In Proceedings of the AISB 2010 Symposium on New Frontiers for Human Robot Interaction, AISB, Savannah, GA, USA, 6–10 February 2010. [Google Scholar]
- Jung, E.J.; Yi, B.J. Control algorithms for a mobile robot tracking a human in front. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 7–12 October 2012; pp. 2411–2416. [Google Scholar]
- Hirai, N.; Mizoguchi, H. Visual tracking of human back and shoulder for person following robot. In Proceedings of the 2003 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), Kobe, Japan, 20–24 July 2003; Volume 1, pp. 527–532. [Google Scholar] [CrossRef]
- Bellotto, N.; Hu, H. Multisensor-based human detection and tracking for mobile service robots. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2009, 39, 167–181. [Google Scholar] [CrossRef] [PubMed]
- Arras, K.O.; Lau, B.; Grzonka, S.; Luber, M.; Mozos, O.M.; Meyer-Delius, D.; Burgard, W. Range-based people detection and tracking for socially enabled service robots. In Towards Service Robots for Everyday Environments; Springer: Berlin, Germany, 2012; pp. 235–280. [Google Scholar]
- Guerrero-Higueras, Á.M.; Álvarez-Aparicio, C.; Calvo-Olivera, M.C.; Rodríguez-Lera, F.J.; Fernández-Llamas, C.; Martín, F.; Matellan, V. Tracking People in a Mobile Robot From 2D LIDAR Scans Using Full Convolutional Neural Networks for Security in Cluttered Environments. Front. Neurorobot. 2019, 12, 85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- PeTra (People Tracker). Available online: http://wiki.ros.org/PeTra (accessed on 30 August 2019).
- Leon@home Testbed. Available online: http://robotica.unileon.es/index.php/Testbed (accessed on 30 August 2019).
- European Robotics League (ERL) certified test environments. Available online: https://www.eu-robotics.net/robotics_league/erl-service/certified-test-beds/index.html (accessed on 30 August 2019).
- Guerrero-Higueras, Á.M.; DeCastro-Garcia, N.; Matellan, V. Detection of Cyber-attacks to indoor real time localization systems for autonomous robots. Robot. Auton. Syst. 2018, 99, 75–83. [Google Scholar] [CrossRef]
- Guerrero-Higueras, Á.M.; DeCastro-García, N.; Rodríguez-Lera, F.J.; Matellán, V. Empirical analysis of cyber-attacks to an indoor real time localization system for autonomous robots. Comput. Secur. 2017, 70, 422–435. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. Medical Image Computing and Computer-Assisted Intervention (MICCAI); Springer: Berlin, Germany, 2015; Volume 9351, pp. 234–241. [Google Scholar]
- Benchmark Dataset for Evaluation of Range-Based People Tracker Classifiers in Mobile Robots. Available online: https://www.frontiersin.org/articles/10.3389/fnbot.2017.00072/full (accessed on 30 August 2019).
- Álvarez-Aparicio, C.; Guerrero-Higueras, Á.M.; Olivera, M.C.C.; Rodríguez-Lera, F.J.; Martín, F.; Matellán, V. Benchmark Dataset for evaluation of Range-Based people tracker Classifiers in Mobile Robots. Front. Neurorobot. 2018, 11, 72. [Google Scholar] [CrossRef]
- PeTra’s new release: Tracking People by Using a 2D LIDAR. Available online: https://youtu.be/GCI7lDXQLAM (accessed on 30 August 2019).
- Guerrero-Higueras, A.M.; Lorenzana, O.; Álvarez-Aparicio, M. Aplicaciones Contenedorizadas en Entornos HPC. Caso Práctico: Aprendizaje Automático Aplicado a Ciberseguridad en Robots Móviles. In Proceedings of the Jornadas SARTECO 2018 Conference, Teruel, Spain, 10–14 September 2018. [Google Scholar] [CrossRef]
- Alvarez-Aparicio, C.; Guerrero-Higueras, Á.M.; Rodríguez Lera, F.J.; Calvo Olivera, M.D.C.; Ginés Clavero, J.; Martín-Rico, F.; Matellan, V. LIDAR-based People Detection and Tracking for @home Competitions. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions, Porto, Portugal, 24–26 April 2019. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Tech. Rep. TR-95-041; Department of Computer Science, University of North Carolina: Chapel Hill, NC, USA, 1995. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Person | Euclidean Distance | Kalman Filter |
|---|---|---|---|
| 1 | 1st | 0.41 () | 0.40 () |
| 2 | 1st | 0.45 () | 0.41 () |
| 2nd | 0.41 () | 0.41 () | |
| 3 | 1st | 0.95 () | 0.44 () |
| 2nd | 1.04 () | 0.39 () |
| Release | Average Rate (Hz) | Min. (s) | Max. (s) | Std. Deviation (s) | Window |
|---|---|---|---|---|---|
| 1st | 6.299 | 0.140 | 0.184 | 0.00810 | 373 |
| 2nd | 10.000 | 0.089 | 0.111 | 0.00326 | 595 |
| Release | CPU Usage (%) | Memory Usage (KB) | Sample Size (s) | Iterations | S/Iteration |
|---|---|---|---|---|---|
| 1st | 446 | 549,288 | 59.27 | 383 | 0.154752 |
| 2nd | 430 | 247,036 | 59.7053 | 1778 | 0.03358 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez-Aparicio, C.; Guerrero-Higueras, Á.M.; Rodríguez-Lera, F.J.; Ginés Clavero, J.; Martín Rico, F.; Matellán, V. People Detection and Tracking Using LIDAR Sensors. Robotics 2019, 8, 75. https://doi.org/10.3390/robotics8030075
Álvarez-Aparicio C, Guerrero-Higueras ÁM, Rodríguez-Lera FJ, Ginés Clavero J, Martín Rico F, Matellán V. People Detection and Tracking Using LIDAR Sensors. Robotics. 2019; 8(3):75. https://doi.org/10.3390/robotics8030075
Chicago/Turabian StyleÁlvarez-Aparicio, Claudia, Ángel Manuel Guerrero-Higueras, Francisco Javier Rodríguez-Lera, Jonatan Ginés Clavero, Francisco Martín Rico, and Vicente Matellán. 2019. "People Detection and Tracking Using LIDAR Sensors" Robotics 8, no. 3: 75. https://doi.org/10.3390/robotics8030075
APA StyleÁlvarez-Aparicio, C., Guerrero-Higueras, Á. M., Rodríguez-Lera, F. J., Ginés Clavero, J., Martín Rico, F., & Matellán, V. (2019). People Detection and Tracking Using LIDAR Sensors. Robotics, 8(3), 75. https://doi.org/10.3390/robotics8030075